Ever wondered how to fine-tune a CNC press brake for optimal performance? This article dives into the key adjustments needed for bending parameters, such as stroke adjustments and working pressure. You’ll learn how to program top dead center positions, variable speed points, and calculate the necessary hydraulic pressure. Whether you’re aiming for precision or longevity of your equipment, understanding these adjustments is crucial for efficient and accurate metalworking. Ready to enhance your CNC press brake’s capabilities? Let’s get started.
During the working process, the positions of the top dead center, speed change point, and bottom dead center of the CNC press brake must be adjusted according to the process requirements for bending the workpiece. The working pressure of the hydraulic system should also be adjusted according to the actual bending force.
Stroke adjustment
Top dead center adjustment
The top dead center position can be adjusted by programming the “opening” item of the controller to change the upper and lower positions. Refer to the “CNC system operation manual” for details.
Variable speed point adjustment
The variable speed point is the position of the ram when it switches from no-load speed to working speed. The position of the shift point can be adjusted by programming the “shift point” item of the controller.
Bottom dead center adjustment
After the ram completes the working stroke, the lower dead center position can be adjusted by programming the “Y-axis value” item of the controller.
Working pressure adjustment of hydraulic system
The pressure required for bending can be calculated using the table lookup method or formula method, and the table lookup method is preferred.
Calculation of pressure by formula method
The required bending pressure can be calculated from the following bending formula:
The new international standard unit of force is Newton.
1kgf ≈ 10N
1tf ≈ 10000N=10kN
1MPa ≈ 10bar
For example:
Plate material: 16Mn, σ b = 530N/mm², plate thickness: S = 15mm, plate length: L = 10000mm = 10m
Lower die opening distance: V = 8 × S=8 × 15 = 120mm
Calculated bending force F1 = 1.42×10000×530×15²/(1000×120) ≈ 14000 (KN)
Considering the influence of various factors, 10% reserve shall be added to calculate the bending force.
Therefore, F2=1.1 × F1 = 1.1 × 14000=15400(kN)
Calculation of pressure by table lookup method
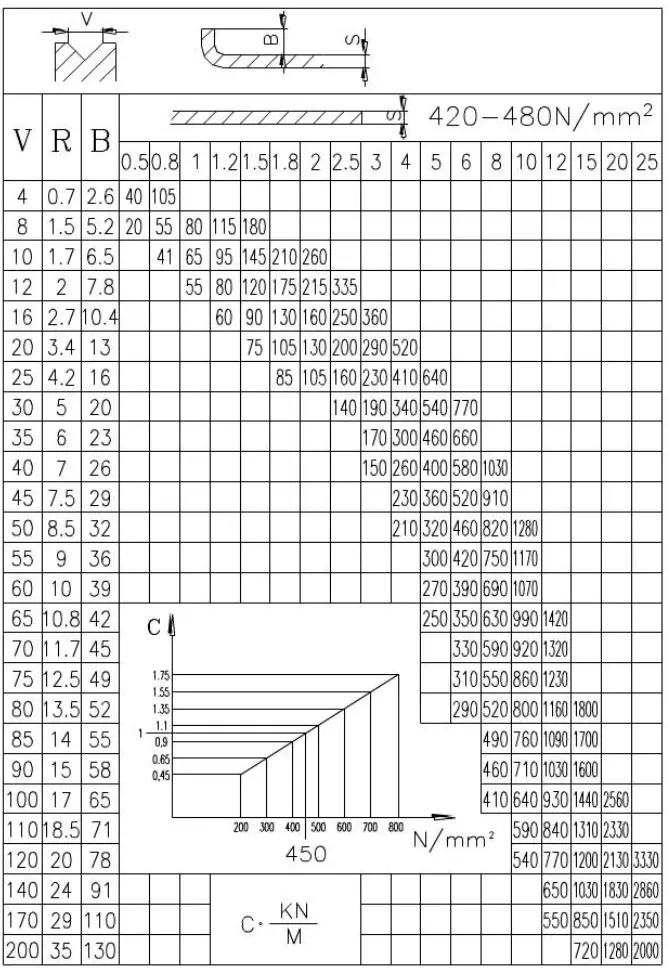
The bending pressure table is shown in Figure below.
The value of bending force in the table is given when σ b = 450N/mm², and its unit is KN/m.
In the table,
S – plate thickness (mm)
V – opening width of lower die (mm, 8 × plate thickness)
You can use the bending pressure table to determine the required bending pressure.
For example:
It can be seen from the table that at the intersection of plate thickness S = 15mm and opening distance V = 120mm, the bending force per meter is F3 = 1200kN/m
Since σ b = 530N/mm², check table C ≈ 1.18. (530/450≈1.18)
If the calculated bending force F2 of a bending length is less than the machine output force P in the above table, the working pressure of the hydraulic system should be reduced in order to reduce the oil temperature and improve the service life of the hydraulic components.
The working pressure Q of the hydraulic system can be calculated by the following formula:
Q=28 × F2/P(MPa)
The working pressure of the hydraulic system can be adjusted by the machine tool controller.
During the adjustment, check the corresponding P value in the bending pressure table according to the actual bending force, and input it into the computer.
Convex amount of worktable
The workbench and ram are supported at two points along the entire length.
Under the action of loading force P, deformation will occur, and the amount of deformation is represented by f (refer to the figure below).
In order to solve this problem, the machine adopts a movable “convex” on the worktable to compensate for the deformation of the worktable and ram and improve the accuracy of the angle and straightness of the workpiece.
The adjustable convex amount of the worktable ranges from 0 to 2.0mm.
During operation, determine the convex value according to the actual bending load force (or the angle difference between the two ends of the workpiece and the middle), and then input it into the controller for operation.
There is a small hole and a set of numbers at the end of the convex adjustment motor, which serve as the reference positions of the measurement hole and the convex zero point, respectively. These provide convenience for users to determine the convex zero point.
As the founder of MachineMFG, I have dedicated over a decade of my career to the metalworking industry. My extensive experience has allowed me to become an expert in the fields of sheet metal fabrication, machining, mechanical engineering, and machine tools for metals. I am constantly thinking, reading, and writing about these subjects, constantly striving to stay at the forefront of my field. Let my knowledge and expertise be an asset to your business.
Why do CNC press brake rams deform, causing costly production delays? This article explores the common causes of ram deformation in CNC press brakes, from prolonged usage to material stresses,…
Compared to conventional press brakes, CNC press brakes have many advantages in improving working efficiency. Here, we explain these advantages in 6 aspects. Graphical user interface The user interface serves…
Have you ever struggled to choose the right press brake controller for your manufacturing needs? In this article, we’ll explore the differences between NC and CNC systems, helping you make…
Ever struggled with achieving precision and efficiency while using a CNC press brake? This article dives into practical tips to optimize your CNC press brake operations, covering everything from adding…
Have you ever wondered what makes a CNC press brake so precise and powerful? This article delves into the essential components that contribute to its efficiency, from the robust bed…
Ever wondered how to keep your CNC press brake in top condition? Maintaining your machine involves more than just occasional cleaning; it’s about ensuring every part, from the hydraulic system…
Are you struggling with inconsistent bends on your CNC press brake? This article demystifies the critical adjustments needed for perfect synchronization and precision. From fine-tuning the electro-hydraulic servo system to…
Installing a CNC press brake can seem daunting, but it's essential for precision in metalworking. This guide covers the critical steps: lifting the machine, ensuring a proper foundation, making electrical…
Ever wondered how CNC press brakes achieve precise synchronization? This article delves into the electro-hydraulic system behind CNC press brakes, explaining how components like hydraulic cylinders and proportional valves work…