دليل إعداد برنامج تشغيل المؤازر الاحترافي للحصول على الأداء الأمثل
هل تساءلت يومًا عن كيفية إعداد محرك سيرفو لتحقيق أعلى أداء؟ يغطي هذا الدليل كل ما تحتاج إلى معرفته حول ضبط معلمات الكسب، من التحكم في الموضع إلى تنظيم السرعة....
كيف يمكن لنظام الكامة والتابع البسيط أن يؤدي إلى حركة فعالة ودقيقة في الآلات المعقدة؟ تستكشف هذه المقالة تعقيدات تصميم آلية محرك الكامة، وتشرح الأنواع المختلفة من الكامات والتوابع، ومسارات حركتها، وكيفية تحقيق الأداء الأمثل. من المكونات الأساسية إلى طرق التصميم المتقدمة، سيحصل القراء على رؤى قيمة في إنشاء أنظمة كامات عالية الكفاءة. توقع أن تتعلم نصائح عملية وتحليلات مفصلة من شأنها أن تعزز فهمك وتطبيقك لآليات الكامات في المشاريع الهندسية.
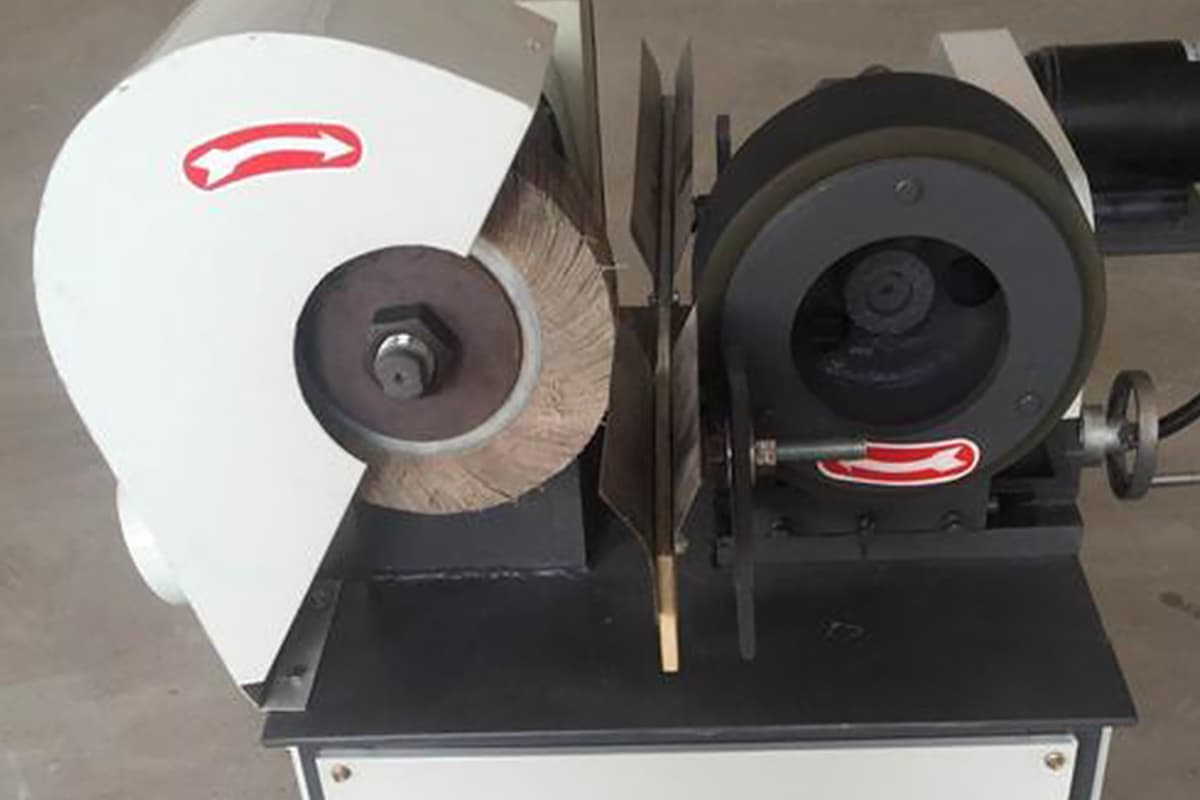
تتكون آلية الكامة عادةً من جزأين متحركين، وهما الكامة والمتابع، وكلاهما مثبتان في الإطار. جهاز الكامة متعدد الاستخدامات، ويمكنه توليد أي حركة عشوائية تقريباً.
يمكن تعريف الكامة بأنها مكوّن ذو سطح منحني أو أخدود. من خلال تأرجحها أو تدويرها، يمكن لمكوّن آخر، وهو المتابع، توفير حركة محددة مسبقًا. يقتصر مسار التابع في الغالب على فتحة من أجل الحصول على حركة ترددية.
بينما تعتمد في بعض الأحيان على وزنها أثناء شوط العودة، تستخدم بعض الآليات نوابض كقوة رجوع لتحقيق حركات دقيقة. ويستخدم البعض الآخر قضبان توجيه للتحرك على طول مسارات محددة.
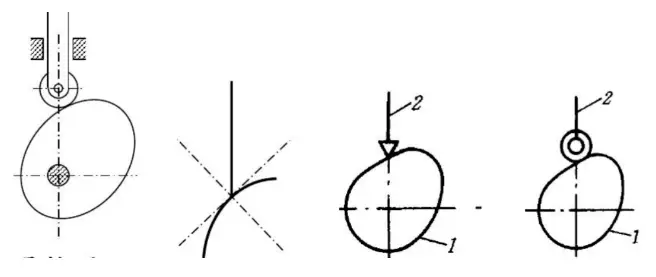
وفقًا لشكل الكامة، يمكن تقسيمها إلى ثلاثة أنواع: كاميرا قرصية وكاميرا متحركة وكاميرا أسطوانية.
يمكن تقسيم المتابعات وفقًا لنهاياتها إلى ثلاثة أنواع: المتابعات المدببة، والمتابعات الأسطوانية، والمتابعات المسطحة القاع.
نظرًا للتلامس النقطي بين المتابع ذي الأنف الحاد والكامة، والذي يؤدي إلى إجهاد عالٍ وتآكل سريع، فإنه غير مناسب لآليات الكامات منخفضة السرعة ذات الصدمات الكبيرة. يمكن للتابع الأسطواني التغلب على هذه العيوب.
من أجل تحسين كفاءة الإرسال، يمكننا أيضًا إدخال تابع مسطح القاع يكون عموديًا على اتجاه القوة على السطح السفلي.
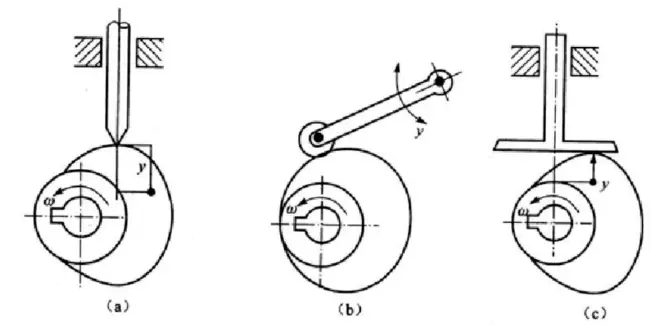
تكون مكوِّنات النقل التي تناولناها سابقًا على شكل حركة في خط مستقيم، لكن يمكن أن تكون أيضًا على شكل حركة متذبذبة. تُسمَّى الأولى بالمتابع المباشر، والثانية تُسمَّى بالمتابع المتأرجح.
يمكننا أيضًا جعل مركز دوران الحدبة ليس على المسار الخطي لحركة المتابع. في هذا الوقت، نسميه إزاحة. وبالمقابل، إذا كان مركز الدوران على المسار الخطي لحركة المتابع، فيمكننا أن نسميه إزاحة مركزية.
بالإضافة إلى ذلك، يمكننا أيضًا النظر في طرق الحفاظ على علاقات القفل عالية الضغط وتقسيم الآلية إلى قفل هندسي وقفل بالقوة.
من خلال الجمع بين شكل الكامة، ونهاية المتابع، ونمط حركة المتابع، يمكننا تحديد اسم الآلية المصممة، مثل: كاميرا قرصية ذات تابع حاد الأنف مباشر المفعول (الوضع النسبي لكاميرا المتابع + نهاية المتابع + نمط حركة المتابع + شكل الكاميرا).
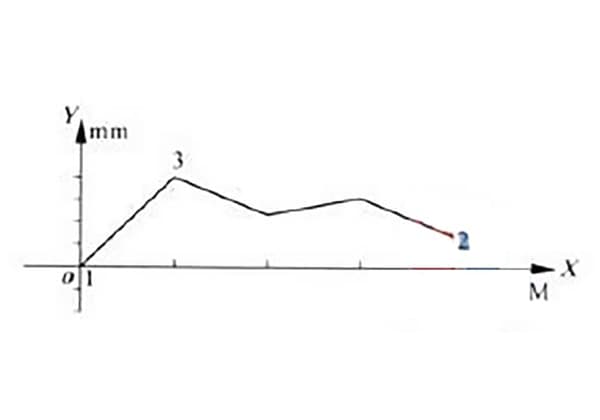
أولاً، لدينا كاميرا مع متابع موضوع عليها. عندما تدور الحدبة بسرعة زاوية ω بمقدار φs درجة، لا يتحرك المتابع. في هذا الوقت، نطلق على φs زاوية السكون، وتسمى الدائرة المناظرة لها الدائرة الأساسية. وبالمثل، يسمى نصف قطر هذه الدائرة نصف قطر الدائرة الأساسية r0.
ثم، بينما نستمر في تدوير الكامة بسرعة زاوية ω بمقدار φ درجة، يرتفع المتابع بمقدار h. في هذا الوقت، نسمي φ زاوية الشوط، و h تسمى الشوط.
لاحقًا، عندما يصل المتابع إلى النقطة h، نتركه لفترة من الوقت. في هذه الأثناء، تدور الحدبة بمقدار φs'، وهو ما يتوافق مع زاوية الرفع.
وأخيرًا، نحتاج إلى إعادة المتابع إلى موضعه الأصلي، لذا نقوم بتدوير الحدبة بمقدار φ'. في هذا الوقت، يعود المتابع إلى نقطة البداية. نسمي φ' زاوية العودة.
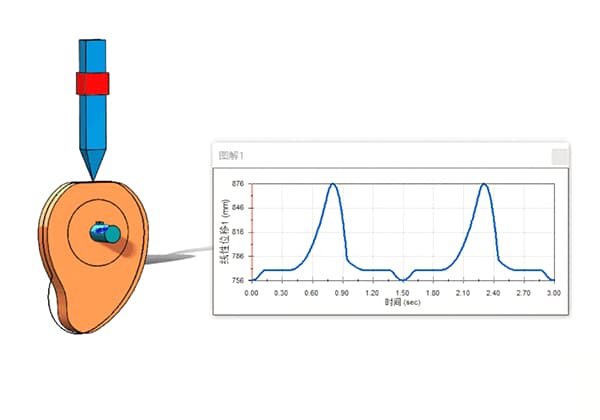
هناك طريقتان رئيسيتان لتصميم آليات الكامات، إحداهما هي الطريقة البيانية والأخرى هي الطريقة التحليلية.
الطريقة الأولى بسيطة نسبيًا، ولا تتطلب سوى توفير مخطط حركة الدفع المطلوب، ثم الحصول على المنحنى الكنتوري المقابل بناءً على العلاقة بين الزاوية والعملية التي يوفرها المخطط.
الدقة ليست عالية جدًا. يتم حساب هذا الأخير، وحسابه معقد نسبيًا، وهو مناسب لتصميم آليات الكامات ذات متطلبات الدقة العالية.

بصفتي مؤسس شركة MachineMFG، فقد كرّستُ أكثر من عقد من حياتي المهنية في مجال تصنيع المعادن. وقد أتاحت لي خبرتي الواسعة أن أصبح خبيرًا في مجالات تصنيع الصفائح المعدنية، والتصنيع الآلي، والهندسة الميكانيكية، وأدوات الماكينات للمعادن. أفكر وأقرأ وأكتب باستمرار في هذه المواضيع، وأسعى باستمرار للبقاء في طليعة مجال عملي. فلتكن معرفتي وخبرتي مصدر قوة لعملك.