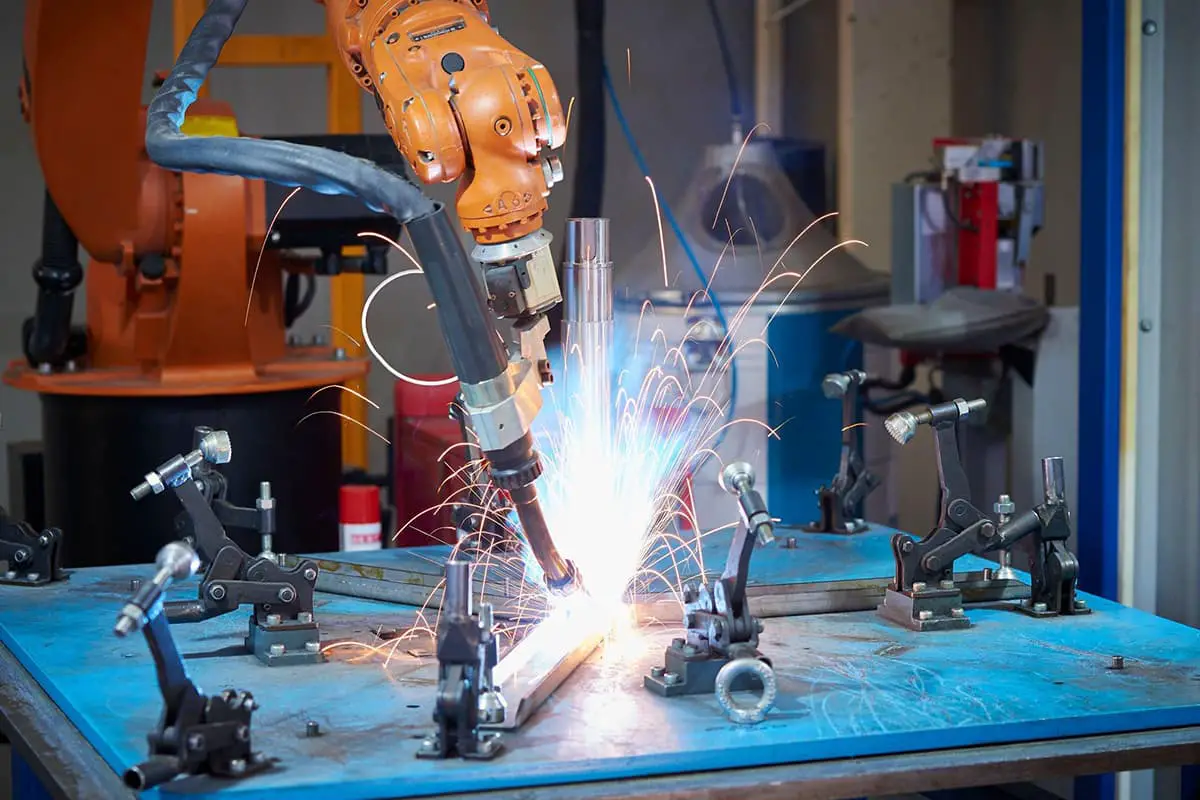
عند اختيار روبوت اللحام من الشركات المصنعة، أو عند شراء روبوت لحام ذكي، من الضروري فهم مواصفات أدائه بشكل كامل ودقيق. تُعد الكفاءة في المواصفات الفنية الرئيسية لروبوت اللحام الذكي شرطًا أساسيًا لتشغيله بشكل صحيح عند لحام قطع العمل.
عادةً ما توفر كتيبات المنتجات من الشركات المصنعة لروبوتات اللحام مواصفات فنية أساسية إلى حد ما، ويجب فهم بعض مؤشرات الأداء الفني بعمق بناءً على الوضع الفعلي للمستخدم من خلال الاتصالات التجارية وعمليات الفحص في الموقع.
المواصفات الفنية الرئيسية للحام الشركات المصنعة للروبوتات يمكن تقسيمها إلى فئتين رئيسيتين: المؤشرات الفنية العامة لروبوتات اللحام والمؤشرات الفنية الخاصة بروبوتات اللحام.
I. مؤشرات فنية عامة لروبوتات اللحام الآلية
1. درجات الحرية:
وهذا مؤشر مهم يعكس مرونة روبوت اللحام. بشكل عام، يمكن أن تصل ثلاث درجات من الحرية إلى أي نقطة في مساحة عمل روبوت اللحام.
ومع ذلك، لا يحتاج اللحام إلى تحقيق وضع معين في الفضاء فحسب، بل يحتاج أيضًا إلى ضمان الوضع المكاني لمسدس اللحام أو ملقط اللحام.
ولذلك، تحتاج روبوتات اللحام القوسي وروبوتات قطع اللحام إلى خمس درجات حرية على الأقل، وتحتاج روبوتات اللحام النقطي إلى ست درجات حرية.
2. سعة الحمولة:
يشير هذا إلى الحمولة المقدرة التي يمكن أن يتحملها طرف روبوت اللحام، بما في ذلك مسدس اللحام وكابلاتها, أدوات القطع وأنابيب الغاز، وملقط اللحام والكابلات، وأنابيب مياه التبريد، إلخ.
لذلك، تبلغ سعة حمولة روبوتات اللحام القوسي وروبوتات قطع اللحام 6-10 كجم. إذا كان اللحام الموضعي يستخدم الروبوت محول مدمج وملقط لحام مدمج، يجب أن تكون سعة حمولته 60-90 كجم. في حالة استخدام ملقط لحام منفصل، يجب أن تكون سعة حمولته 40-50 كجم.
3. مساحة عمل روبوتات اللحام:
إن مساحة العمل التي توفرها الشركات المصنعة هي أقصى مساحة يمكن الوصول إليها لروبوت اللحام بدون تركيب أي مستجيب طرفي، ممثلة بيانياً. من المهم ملاحظة أنه بعد تركيب المعدات مثل مسدس اللحام أو ملقط اللحام، يجب الحفاظ على وضعية مسدس اللحام.
سوف تكون مساحة اللحام الفعلية أصغر مما توفره الشركة المصنعة، ومن الضروري الحساب بعناية باستخدام الرسم بمقياس رسم أو طرق النمذجة لتحديد ما إذا كانت تلبي الاحتياجات الفعلية للشركة المصنعة.
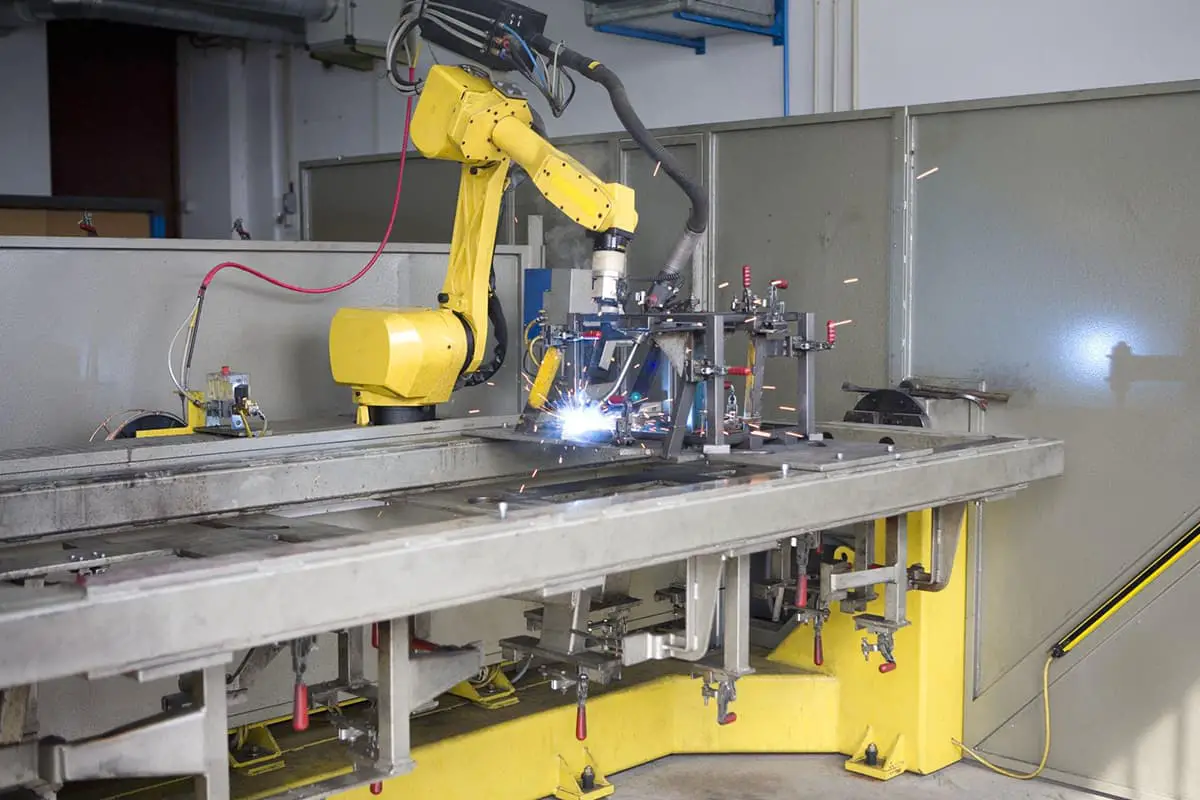
4. السرعة القصوى لتشغيل روبوت اللحام:
هذا مؤشر مهم يؤثر على كفاءة الإنتاج في إنتاج اللحام. يوفر دليل المنتج الخاص بالشركة المصنعة لروبوت اللحام السرعة القصوى التي يمكن أن يصل إليها روبوت اللحام في نهاية معصمه في حالة ربط كل محور.
نظرًا للسرعة المنخفضة المطلوبة للحام، فإن السرعة القصوى تؤثر فقط على التموضع، وحركة التباطؤ، ووقت عودة مسدس اللحام أو مشبك اللحام.
5. دقة التكرار من نقطة إلى نقطة:
يعد هذا أحد أهم مؤشرات أداء روبوت اللحام. بالنسبة لروبوتات اللحام النقطي، بدءًا من عملية اللحام المتطلبات، يجب أن تصل دقتها إلى أقل من 1/2 من قطر القطب الكهربائي لمشبك اللحام، أي +1-2 مم؛ بالنسبة لروبوتات اللحام بالقوس الكهربائي، يجب أن تكون أقل من 1/2 من قطر سلك اللحام، وهو 0.2-0.4 مم.
6. دقة تكرار المسار:
هذا المؤشر مهم جدًا لروبوتات اللحام القوسي وروبوتات قطع اللحام، ولكن لا يمكن لمختلف الشركات المصنعة للروبوتات توفير هذا المؤشر لأن عملية القياس معقدة نسبيًا. عادةً ما تقوم مختلف الشركات المصنعة للروبوتات بإجراء هذا القياس داخليًا ويجب أن تصر على طلب بيانات الدقة الخاصة به.
بالنسبة لروبوتات اللحام القوسي وروبوتات قطع اللحام، يجب أن تكون دقة تكرار المسار أقل من 1/2 من قطر سلك اللحام أو قطر فتحة القطع لأداة القطع، وتحتاج عمومًا إلى أن تصل إلى أقل من +0.3 إلى 0.5 مم.
7. سعة ذاكرة المستخدم:
يشير هذا إلى سعة ذاكرة الكمبيوتر الرئيسية داخل وحدة تحكم روبوت اللحام. وهو يشير إلى طول برنامج التعليم الذي يمكن لروبوت اللحام تخزينه، والذي يتعلق بتعقيد قطعة العمل التي يمكن معالجتها، أو بعبارة أخرى، الحد الأقصى لعدد نقاط التعليم.
يتم التعبير عنها عادةً بالمعامل الذي يمكنه تخزين تعليمات الروبوت والعدد الإجمالي للبايتات المخزنة. ويمكن تمثيله أيضاً بالحد الأقصى لعدد نقاط التدريس.
8. وظيفة الاستيفاء:
بالنسبة لروبوتات اللحام القوسي وروبوتات قطع اللحام وروبوتات اللحام النقطي، يجب أن تحتوي جميعها على وظائف الاستيفاء الخطي والاستيفاء الدائري.
9. وظيفة تحويل اللغة:
لكل مصنع روبوت لغة خاصة به، ولكن يمكن أن تكون شاشة العرض بلغات متعددة. على سبيل المثال، يمكن لروبوت اللحام من ياسكاوا أن يُعرض باللغات الصينية واليابانية والإنجليزية والألمانية والفرنسية وغيرها من اللغات.
10. وظيفة التشخيص الذاتي:
يجب أن تتمتع روبوتات اللحام بوظائف مختلفة مثل الفحص التلقائي للمكونات الرئيسية، ووحدات الوظائف الرئيسية، وإنذارات الأعطال، وعرض موقع الخطأ، وما إلى ذلك. وهذا مهم جدًا لضمان الإصلاح السريع لروبوتات اللحام وتوفير الضمان.
لذلك، تُعد وظيفة التشخيص الذاتي ميزة مهمة لروبوتات اللحام وأحد المؤشرات الرئيسية لاكتمال المنتج لدى مصنعي روبوتات اللحام.
تحتوي جميع العائلات الأربع الرئيسية من الروبوتات على 30-50 عنصرًا من عناصر وظائف التشخيص الذاتي، تعرض نتائج التشخيص والإنذارات للمستخدمين عبر رموز محددة وأضواء مؤشرات.
11. ميزات الحماية الذاتية والسلامة:
تمتلك روبوتات اللحام ميزات الحماية الذاتية والسلامة. ويشمل ذلك في المقام الأول آليات حماية مثل الإيقاف الذاتي للتشغيل الذاتي لارتفاع درجة حرارة نظام الدفع، والإيقاف الذاتي لتجاوز حد الحركة والإيقاف الذاتي للتشغيل الذاتي والإيقاف الذاتي للدوران الزائد، وكلها تمنع روبوت اللحام من التسبب في إصابة أو إتلاف المعدات المساعدة.
يتم تركيب مستشعرات اللمس أو مستشعرات القرب في أجزاء العمل في روبوت اللحام، مما يتيح له التوقف عن العمل تلقائيًا عند الضرورة.
II. المواصفات الفنية لروبوتات اللحام
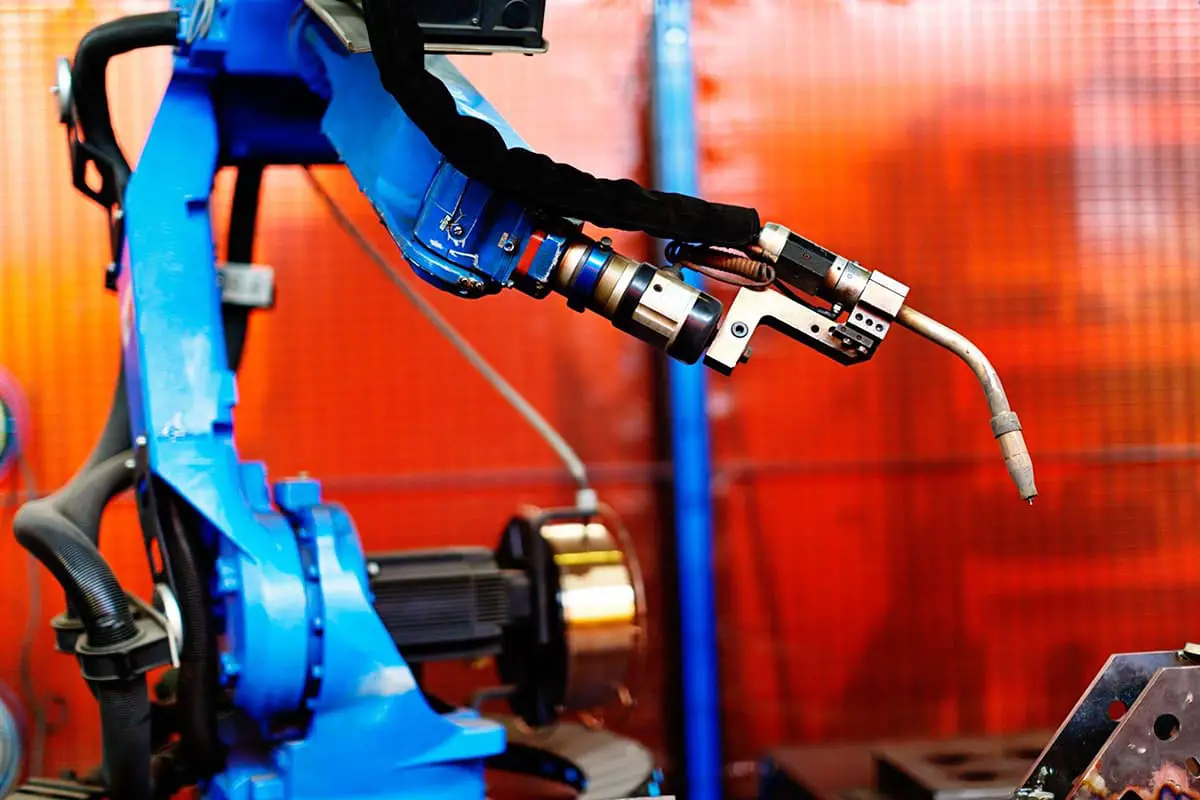
1. طرق اللحام أو القطع الآلي القابلة للتطبيق:
وهذا أمر بالغ الأهمية بشكل خاص بالنسبة لروبوتات اللحام بالقوس الكهربائي، مما يعكس بشكل أساسي قدرات مقاومة التداخل لأنظمة التحكم والقيادة في الروبوت.
عادةً ما تستخدم روبوتات اللحام بالقوس فقط طرق اللحام بالغاز القوس المعدني اللحام (GMAW)، حيث إن هذه الطرق لا تتطلب بدء قوس عالي التردد، وتفتقر أنظمة التحكم والقيادة في الروبوت إلى تدابير مضادة خاصة للتداخل.
تُعد روبوتات اللحام بالقوس الكهربائي القادرة على استخدام اللحام بغاز التنغستن الخامل (TIG) من الابتكارات الحديثة، وهي مزودة بمجموعة متميزة من التدابير المضادة للتداخل. بالنسبة للمستخدمين، يعد هذا اعتبارًا مهمًا عند اختيار الروبوت.
2. وظيفة التذبذب:
وهذا الأمر مهم للغاية بالنسبة لروبوتات اللحام بالقوس الكهربائي لأنه يؤثر بشكل مباشر على أداء عملية اللحام. يختلف مدى قدرات التذبذب اختلافًا كبيرًا بين هذه الروبوتات.
يوفر بعضها مجموعة ثابتة فقط من أوضاع التذبذب، بينما يسمح البعض الآخر بالإعداد التعسفي لأوضاع التذبذب والمعلمات داخل المستوى X-Y. ومع ذلك، سيكون الخيار الأمثل هو الروبوتات التي تسمح بالإعداد التعسفي لأوضاع التذبذب والمعلمات داخل الفضاء ثلاثي الأبعاد (X-Y-Z).
3. وظيفة تدريس نقاط عملية اللحام:
هذه ميزة مفيدة بشكل خاص أثناء عملية تعليم اللحام. فهي تتضمن أولاً تعليم موضع نقطة معينة على درز اللحاممتبوعًا بتعديل وضعية شعلة اللحام أو المشبك. أثناء تعديل الوضعية، يظل وضع التدريس الأصلي دون تغيير.
بشكل أساسي، يمكن لروبوت اللحام أن يعوض تلقائيًا عن تغييرات الموقع الناتجة عن تعديلات الوضعية، مما يضمن ثبات نقطة الإحداثيات، وبالتالي يسهل على المشغل.
4. التشخيص الذاتي لأعطال عملية اللحام ووظيفة المعالجة الذاتية:
يشير هذا إلى أعطال عملية اللحام الشائعة في روبوتات اللحام، مثل التصاق أسلاك اللحام القوسي، وانقطاع الأسلاك، والتصاق قطب اللحام الموضعي.
إذا حدثت هذه الأعطال ولم تتم معالجتها على الفور، فقد يؤدي ذلك إلى وقوع حوادث كبيرة، مثل تلف روبوت اللحام أو تخريد قطع العمل.
ولذلك، من الضروري أن تتمكن روبوتات اللحام من اكتشاف هذه الأنواع من الأعطال والتوقف والتنبيه تلقائيًا في الوقت الفعلي.
5. وظيفة بدء القوس وإنهائه:
لضمان جودة اللحام بالروبوت، يلزم إجراء تغييرات في المعلمات. أثناء عملية إنتاج اللحام باستخدام روبوت اللحام، يجب إجراء الإعدادات والتعديلات أثناء مرحلة التعليم. هذه أيضًا إحدى الوظائف الأساسية لـ روبوت اللحام القوسي.