The Ultimate Guide to Belt Drive: Maximizing Efficiency and Performance
Have you ever wondered how power is transmitted between machines? Belt drives are a simple yet ingenious solution that has revolutionized mechanical engineering. In this blog post, we’ll explore the fascinating world of belt drives, from their basic principles to their diverse applications. Join us as we unravel the mysteries behind this essential component of modern machinery and discover how it continues to shape our world today.
A belt drive is a mechanical power transmission system that transfers rotational motion and torque from a driving shaft to one or more driven shafts using a continuous, flexible belt. This system is particularly effective when the drive and driven components are spatially separated, allowing for efficient power transfer over considerable distances.
Belt drives consist of several key components:
Drive pulley (connected to the power source)
Driven pulley(s) (attached to the load)
Transmission belt (the flexible element)
Tensioning devices (to maintain proper belt tension)
Compared to other mechanical transmissions, belt drives offer several advantages:
Simplified design and lower initial cost
Quiet operation due to reduced metal-to-metal contact
Shock absorption and vibration damping capabilities
Overload protection (belt slippage prevents damage to machinery)
Ease of maintenance and belt replacement
Ability to drive multiple shafts from a single power source
However, belt drives also have limitations:
Potential for slippage under high loads or in humid conditions
Regular maintenance required to ensure proper tension
Limited suitability for high-temperature environments
Working Principle of Belt Drive
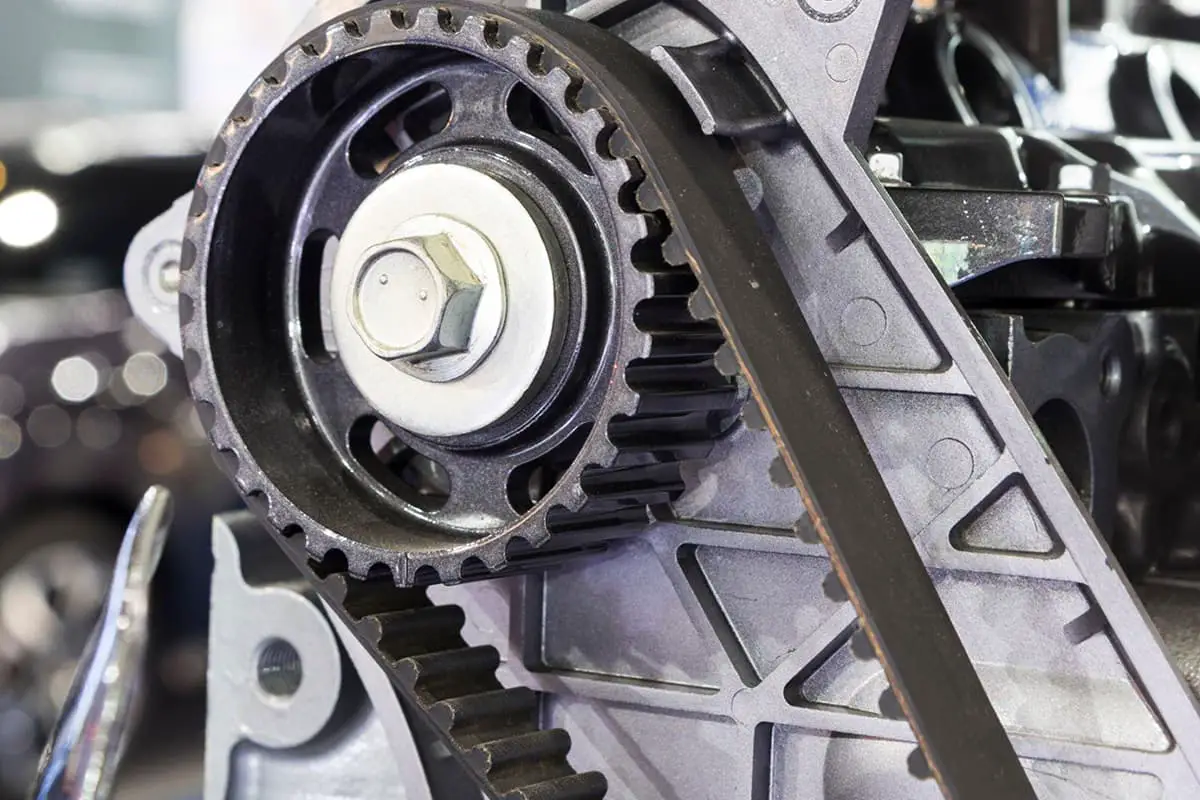
The belt drive system is a fundamental power transmission mechanism comprising several key components: a drive pulley, a driven pulley, a transmission belt tightly fitted over both pulleys, and a supporting machine frame, as illustrated in figure 8-1. This arrangement facilitates the transfer of mechanical energy from one rotating shaft to another through frictional forces.
The drive pulley, typically connected to a power source such as an electric motor or engine, initiates the system’s motion. As it rotates, the pulley’s surface friction engages the transmission belt, causing it to move. This movement is then transferred to the driven pulley, which is mounted on the shaft of the machine or device requiring power.
The efficiency and performance of a belt drive system depend on several factors:
Belt tension: Proper tensioning is crucial for optimal power transmission and minimizing slippage.
Pulley alignment: Precise alignment ensures even belt wear and reduces vibration.
Belt material and design: Different materials and profiles (e.g., V-belt, flat belt, timing belt) offer varying characteristics suitable for specific applications.
Pulley size ratio: This determines the speed and torque relationship between the drive and driven shafts.
Belt drives offer advantages such as shock absorption, noise reduction, and the ability to transmit power over considerable distances. However, they may require periodic maintenance and replacement due to wear and stretch over time.
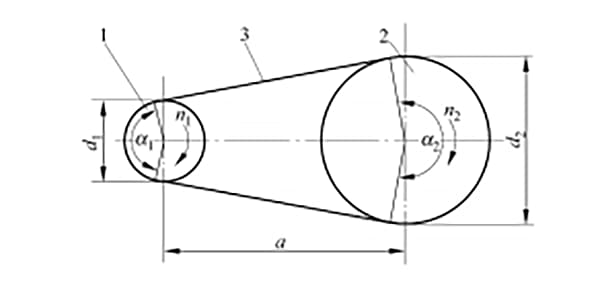
Figure 8-1 Belt Drive
1- Driving pulley 2- Driven pulley 3- Drive belt
Types of Belt Drives
Belt drives can be classified into frictional and meshing types according to their driving principles. This article primarily discusses issues related to frictional belt drives.
2.1. Frictional belt drives operate by transmitting motion and power through the frictional force generated between the drive belt, which fits tightly on the pulley, and the pulley’s contact surface. Based on the cross-sectional shape of the drive belt, they can further be divided into flat belts, V-belts, multi-wedge belts, and round belts.
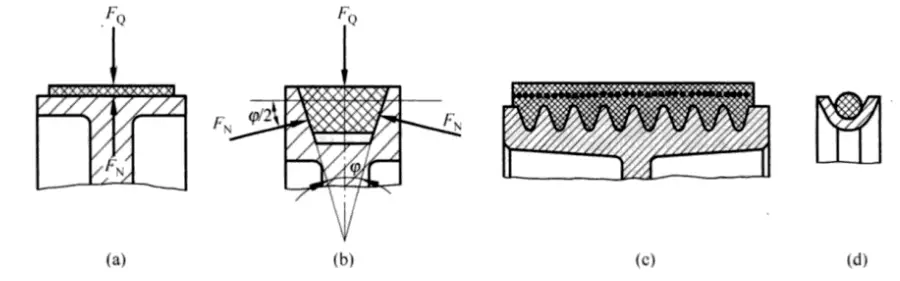
Figure 8-2 Transmission Type and Cross Section Shape of Belt
2.1.1 The cross-section of a flat belt is rectangular, and its inner surface that comes in contact with the pulley is the working face. It is primarily used for long-distance transmission between two parallel shafts rotating in the same direction.
2.1.2 The cross-section of a V-belt is trapezoidal, with the two sides contacting the pulley groove serving as the working surfaces. The pulley groove is also trapezoidal. Force analysis on the wedge surface reveals that under equal tension and friction coefficient conditions, the friction force generated by the V-belt is greater than that of the flat belt.
Therefore, the V-belt has a stronger transmission capacity and a more compact structure, making it widely used in mechanical transmission. Depending on their relative width and height, V-belts can be further divided into types such as regular V-belts, narrow V-belts, wide V-belts, automobile V-belts, cogged V-belts, and high-angle V-belts. Currently, regular V-belts are the most widely used.
2.1.3 The multi-wedge belt, a hybrid of the flat belt and multiple V-belts, combines the advantages of both and is often used in large power transmission systems where a compact structure is required.
2.1.4 The cross-section of a round belt is circular and is used only in low-speed, low-power transmissions such as sewing machines and instruments.
2.2 Meshing belt drive transmits motion and power by meshing the teeth of the belt with those on the pulley. The synchronous belt drive, as shown in Figure 8-3, is a typical example.
Figure 8-3 Synchronous Belt Drive
In addition to retaining the advantages of friction belt transmission, synchronous belts also offer high power transmission, precise gear ratios, and are often used in situations requiring smooth transmission and high precision, such as in tape recorders, food mixers, CNC machine tools, and textile machinery. The cross-section of a synchronous belt is rectangular, with the inner surface of the belt toothed.
Unlike the structure of a belt in friction drive, the strength layer of a synchronous belt is mostly composed of steel wire ropes, which results in less deformation under load. The edge of the synchronous pulley is also manufactured with an involute tooth shape corresponding to the inner surface of the belt, produced using a generating process by involute gear cutting tools. Therefore, the dimensions of the pulley teeth depend on the size of the cutting tools used.
Characteristics of Belt Transmission
Belt drives exhibit excellent elasticity, enabling them to effectively buffer and absorb vibrations, ensuring smooth power transmission with minimal noise generation. During overload conditions, controlled slippage between the belt and pulley serves as a protective mechanism, preventing potential damage to other drivetrain components. The simplicity of belt transmission systems facilitates ease of manufacturing, installation, and maintenance, resulting in cost-effective power transfer solutions.
In operation, transmission belts may experience elastic slip, which can lead to slight variations in the transmission ratio. This phenomenon, while generally manageable, prevents the maintenance of a strictly constant speed ratio. Belt drives typically feature larger overall dimensions compared to other power transmission methods, which can result in slightly lower transmission efficiencies. Consequently, belt transmission systems are most commonly employed for power transfer applications ≤ 50kW, with optimal belt speeds ranging from 5 to 25 m/s. The recommended transmission ratio for efficient operation should not exceed 5:1. Under proper design and maintenance conditions, belt drive systems can achieve efficiencies between 92% and 97%.
Elastic Sliding and Failure Modes in Belt Drive
Belt drives operate under dynamic conditions where elastic deformation plays a crucial role in power transmission and system reliability. The drive belt, composed of elastomeric materials and reinforcing fibers, exhibits viscoelastic behavior under load. As tension is applied, the belt undergoes elastic stretching, with the magnitude of deformation directly proportional to the applied tension force.
During operation, a tension differential exists between the tight side (F1) and the slack side (F2) of the belt, with F1 > F2. This tension imbalance results in non-uniform elastic stretching along the belt’s length. The tight side experiences greater elongation due to higher tensile stress, while the slack side exhibits comparatively less stretch. This differential stretching is fundamental to the belt’s ability to transmit power efficiently.
The elastic nature of the belt also contributes to two critical phenomena:
Creep: As the belt moves around the pulleys, it undergoes continuous cycles of stretching and relaxation. This cyclic loading can lead to gradual, permanent deformation over time, affecting belt tension and potentially reducing transmission efficiency.
Elastic slip: At the point where the belt enters the pulley (the arc of approach), the belt’s velocity momentarily decreases as it stretches to accommodate the higher tension. Conversely, at the exit point (arc of recess), the belt contracts and accelerates slightly. This subtle velocity differential is known as elastic slip and is distinct from gross slippage due to insufficient tension.
1. Elastic Slippage in Belt Drive Systems
Elastic slippage is an intrinsic phenomenon in belt drive operations, occurring inevitably during the working cycle of the drive belt. This complex behavior arises from the elastic properties of the belt material and the varying tension forces experienced along the belt path.
As the tight side of the drive belt engages with the driving pulley at point A, the belt velocity (v) initially matches the circumferential velocity (v1) of pulley 1. However, as pulley 1 rotates from point A to point B, the tension force in the belt gradually decreases from F1 to F2, resulting in a corresponding reduction in elastic elongation. This progressive shortening of the belt causes a minute rearward relative slippage along the pulley face, leading to a belt velocity (v) that becomes slightly less than the circumferential velocity (v1) of pulley 1.
Conversely, as the belt interfaces with the driven pulley 2 from entry point C to exit point D, friction-induced forces cause the belt tension to increase from F2 back to F1. This tension increase leads to a gradual elongation of the belt. Consequently, a small forward relative slippage occurs on the surface of pulley 2, resulting in a belt velocity (v) that marginally exceeds the angular velocity (v2) of pulley 2. This differential slippage due to the elastic deformation of the drive belt is termed elastic slippage.
The implications of elastic slippage are significant:
Belt Wear: The continuous relative motion between the belt and pulley surfaces accelerates wear, potentially reducing the operational lifespan of the belt.
Transmission Efficiency: Elastic slippage can lead to a decrease in the effective speed of the driven pulley, affecting the overall transmission ratio and system efficiency.
Power Loss: The energy dissipated through elastic deformation and friction during slippage contributes to power losses in the system.
Heat Generation: The work done in overcoming friction during slippage is converted to heat, which can affect belt material properties and system thermal management.
Precision Applications: In high-precision machinery, the cumulative effects of elastic slippage can lead to positioning errors or timing discrepancies.
To mitigate the effects of elastic slippage, engineers may employ strategies such as optimizing belt tension, selecting appropriate belt materials with reduced elasticity, or implementing active tensioning systems in critical applications. Understanding and accounting for elastic slippage is crucial in the design and maintenance of efficient and reliable belt drive systems across various industrial applications.
2. Failure Modes of Belt Drive
The primary failure modes during the operation of a belt drive system are belt slippage on the pulley, accelerated belt wear, and fatigue-induced failure. Each of these modes can significantly impact system performance and reliability:
Belt Slippage: Occurs when the friction between the belt and pulley is insufficient to transmit the required torque. This can result from inadequate belt tension, overloading, or contamination of the contact surfaces. Slippage leads to reduced power transmission efficiency, increased wear, and potential heat generation.
Accelerated Belt Wear: Characterized by the gradual deterioration of the belt material, often manifesting as cracks, fraying, or material loss. Factors contributing to accelerated wear include misalignment, excessive tension, environmental conditions (e.g., heat, chemical exposure), and abrasive contaminants. Wear reduces belt cross-sectional area, weakening its load-carrying capacity.
Fatigue-Induced Failure: Results from repetitive stress cycles as the belt continually bends around the pulleys. This failure mode is influenced by factors such as belt construction, pulley diameter, operating speed, and tension. Fatigue typically manifests as transverse cracks or separation of belt plies, leading to sudden belt rupture.
Additionally, less common but equally critical failure modes include:
Pulley Damage: Worn or damaged pulleys can accelerate belt wear and increase the likelihood of slippage.
Tensioner Failure: In systems with automatic tensioners, failure of this component can lead to improper belt tension and subsequent system failures.
2.1 Slippage
Belt drives operate on friction. When the initial tension force F₀ is constant, if the effective circumferential force F exceeds the limit friction force between the belt and the wheel surface, the belt will experience obvious, full-scale sliding on the wheel surface, a phenomenon known as slippage.
When the belt exhibits slippage, although the driving pulley continues to rotate, both the driven pulley and the belt incur substantial speed loss, or even come to a complete halt. Slippage is a detrimental phenomenon as it causes drive failure and exacerbates belt wear. During normal operation, slippage should be avoided.
Elastic sliding and slippage are two distinctly different concepts. Their differences are outlined in Table 8-1.
Table 8-1 Differences between elastic sliding and slipping
Item
Elastic sliding
Slipping
Phenomenon
The sliding of the local belt on the local wheel surface
Relative sliding occurs between the belt and the wheel surface on the entire contact arc
Causes of occurrence
Tension difference on both sides of the belt
The effective pulling force reaches or exceeds the ultimate friction force between the belt and the wheel surface
The stress on the transmission belt varies as it operates, forming an alternating stress. The higher the rotational speed and the shorter the belt, the more frequently the belt wraps around the pulley per unit of time, leading to more frequent changes in stress. Over time, the repeated effect of alternating stress can cause the belt to delaminate and tear, ultimately leading to fatigue failure, which results in transmission failure.
Tensioning Devices for Belt Drives
The transmission belt, when installed on the pulley, should have a certain tension to ensure the normal operation of the belt drive. However, after operating for a period of time, the plastic deformation of the belt can lead to slack, gradually reducing the initial tension and diminishing the belt’s load-bearing capacity.
To control the initial tension of the transmission belt and ensure the operational capability of the belt drive, an appropriate tensioning device must be used. Several commonly used tensioning devices are shown in Figure 8-11.
1. Periodic Tensioning Device
In horizontally arranged or moderately inclined belt drives, a tensioning device as shown in Figure 8-11(a) can be used. The position of the motor, equipped with a pulley, is adjusted using a screw to increase the center distance, thus achieving tensioning. The adjustment method is to mount the motor on a slide rail, and during the initial tensioning of the belt, the motor is pushed to the desired position using the adjustment screw.
In vertical or near-vertical belt drives, a tensioning device as shown in Figure 8-11(b) can be used. By adjusting the position of the swing frame (motor shaft center), the center distance is increased to achieve tensioning. The adjustment method involves adjusting the nut on the screw, causing the machine base to swing around the fixed support shaft to adjust the initial tension. Once the position is adjusted, the nut needs to be locked.
2. Automatic Tensioning Device
Figure 8-11(c) depicts an automatic tensioning device, where the motor, equipped with a pulley, is mounted on a floating swing frame. Utilizing the weight of the motor and swing frame, the pulley and motor swing around the fixed support shaft, automatically adjusting the center distance to achieve tensioning. This method is commonly used for belt drives with low power transmission and near-vertical arrangement.
Figure 8-11(e) shows a tensioning wheel automatically pressing on the belt due to a weight, thereby achieving tensioning. This method is often used in flat belt drives with a large transmission ratio and small center distance, and it has a significant impact on the lifespan of the belt.
3. Utilization of the Tensioning Device of the Tension Pulley
When the center distance of the belt drive cannot be adjusted, a tension pulley can be used to tension the belt, as shown in Figure 8-11(d). The tension pulley is generally installed on the inside of the slack side to allow the belt to undergo unidirectional bending. To prevent the wrap angle of the small pulley from decreasing excessively, the tension pulley should be installed as close as possible to the large pulley.
Specific Requirements for Belt Drive
1. The linear speed of the V-belt should not exceed 25 meters per second, and the flat belt’s linear speed is generally 10-20 meters per second. In special cases, it can be reduced. Belt linear speed can be calculated with the following formula:
V = πDn / 60 x 1000 (meters/second)
Where
V— Belt linear speed, (meters/second)
D— Belt pulley diameter, (mm)
n— Belt pulley rotation speed, (r/min)
2. The number of times the small belt pulley is passed by the flat belt per second, C, should not exceed 3-5 times, and for the V-belt, it should not exceed 20 times.
C = V / L (times / second)
Where L— Belt length (m)
3. The wrap angle of the small V-belt pulley should not be less than 120° (150° for the flat belt), otherwise, the diameter difference between the two belt pulleys should be reduced, the center distance should be increased, or a pressure pulley should be installed.
4. The diameter of the small belt pulley should not be too small to avoid excessive bending of the belt, which shortens its lifespan.
For flat belt drives, the diameter of the small belt pulley should generally be more than 25-30 times the thickness of the cloth tape.
The minimum diameter of the small flat belt pulley, D_min, can be calculated using the formula:
Dmin = C³√N / n1 (mm)
Where
C— Calculation coefficient, C = 1150-1400
N— Transmission power (kw)
n1— Belt pulley rotation speed (r/min)
For V-belt drives, the diameter of the small V-belt pulley should not be less than the following values. Otherwise, the wrap angle is not enough, and the belt is prone to slippage and damage.
V-Belt Model
O
A
B
C
D
E
F
Minimum Diameter of Small Pulley (mm)
70
100
148
200
315
500
800
5. The center distance of flat belt pulleys should be more than twice the sum of the two wheel diameters; the center distance of V-belt pulleys should be more than half the sum of the two wheel diameters, but should not exceed twice the sum.
6. Belt length L can be calculated by the following formula:
In the formula, A represents the center distance between the two belt pulleys (mm), and D2 and D1 denote the diameters of the large and small belt pulleys (mm), respectively.
7. The initial tension of the belt should be tightened with a force of around 16-18 kg per square centimeter of belt cross-sectional area.
Selection of Belt Type and Number of Roots
1. For flat belt transmission, the cross-sectional area of the belt can be calculated based on the power used for transmission and the linear speed of the belt.
F=P/K (cm²)
In this formula,
F – the cross-sectional area of the belt (cm²)
P – the working tension of the belt (kg)
P=102×N/V.
Here, N denotes the power of the motor (kw), and V is the linear speed of the belt (m/s).
K represents the actual effective stress, kg/cm². For rubber belts, K can be chosen within the range of 10-25 kg/cm². When the linear speed is high, load impact is large, starting load is large, continuous work time is long, and wrap angle is small, a smaller value can be chosen; otherwise, a larger value can be chosen.
Based on the calculated cross-sectional area, the width and thickness of the belt can be determined. With each layer of the belt approximately 1.2 mm thick, the number of layers in a flat belt can be approximated.
2. For V-belt transmission, refer to the following table to determine the type of V-belt based on the transmitted power.
The power range applicable to various types of V-belts.
Power Transmission (kW)
0.4-0.75
0.75-2.2
2.2-3.7
3.7-7.5
7.5-20
20-40
40-75
75-150
above 150
Recommended Model
O
O、A
O,A,B
A,B
B,C
C,D
D,E
E,F
F
The number of V-belts, Z, can be calculated using the following formula:
Z = N / (Z0 * C1 * C2) ^ 0.5
Where:
N is the transmitted power (kW);
Z0 is the power transmitted by a single V-belt, which can be determined from the table below;
C1 is the wrap angle coefficient, determined by the belt wrap angle.
Belt wrap angle a°
180
170
160
150
140
130
120
110
100
C1
1.0
0.97
0.94
0.91
0.88
0.85
0.82
0.79
0.76
C2 – Working Condition Coefficient; 0.6-0.7.
Dimensions of V-belt Pulley Groove.
The dimensions of the V-belt pulley groove (see figure) can be found in the table below.
Power (in kW) transmitted by a single V-belt.
Model
Small Belt Pulley Diameter D1 (mm)
Belt Speed (m/s)
5
10
15
20
O
50~63
0.31
0.59
0.88
1.07
80
0.38
0.74
1.04
1.29
>90
0.42
0.82
1.14
1.40
A
80~90
0.59
1.04
1.32
1.33
100
0.66
1.18
1.51
1.64
>125
0.81
1.47
1.87
2.21
B
125
1.02
1.84
2.43
2.58
140
1.12
2.06
2.80
3.10
>180
1.32
2.41
3.28
3.94
C
2OO
1.98
3.60
4.80
5.52
250
2.41
4.45
6.14
7.00
>280
2.67
4.95
6.77
7.72
D
315
3.98
7.00
9.20
9.95
400
5.07
9.10
12.30
14.40
>450
5.45
9.95
13.30
15.40
Dimensional Diagram of V-Belt Pulley Grooves
When calculating the transmission ratio, the diameter of the pulley refers to the position D in the diagram, not the outer edge of the wheel. Additionally, consider that the belt has a 1% slippage.
Dimensions of the v-belt pulley groove:
Groove Dimensions (mm)
Model
O
A
B
C
D
E
F
a
10
13
17
22
32
38
50
ι
10
13
17
22
30
36
48
c
3
4
5
7
9
12
16
t
12
16
21
27
38
44
58
s
9
12
15
18
23
26
32
Corresponding slot angle φ
Minimum diameter of the V-belt pulley (in millimeters)
As the founder of MachineMFG, I have dedicated over a decade of my career to the metalworking industry. My extensive experience has allowed me to become an expert in the fields of sheet metal fabrication, machining, mechanical engineering, and machine tools for metals. I am constantly thinking, reading, and writing about these subjects, constantly striving to stay at the forefront of my field. Let my knowledge and expertise be an asset to your business.
Imagine unlocking the precision of machine tools with a simple glass surface. Linear grating scales do just that, transforming fine lines into highly accurate measurements. This article explores how these…
Have you ever wondered how sharp edges on metal parts are smoothed out? This process, known as chamfering, transforms dangerous, jagged corners into safer, angled surfaces. In this article, you'll…
Have you ever wondered which bearing brands are the best in the world? In this blog post, we'll explore the top bearing manufacturers known for their exceptional quality, innovation, and…
Have you ever wondered who powers the world behind the scenes? In this blog post, we'll take a deep dive into the top generator manufacturers that keep the lights on…
Are you an aspiring mechanical engineer looking to excel in your field? In this blog post, we'll explore the top 10 must-know mechanical engineering design software that can elevate your…
Ever wondered how the integrity of welded nuts and screws in your car is ensured? This article reveals the meticulous process of quality checks and inspections that keep your vehicle…
Have you ever wondered what keeps an electric motor running smoothly without overheating? Understanding the safe operating temperatures for motors is crucial for their longevity and performance. In this article,…
Have you ever wondered about the fascinating world of casting? This ancient yet ever-evolving manufacturing process shapes our daily lives in countless ways. In this blog post, we'll explore the…
Have you ever wondered how the gears in your car or airplane work so smoothly? This article unveils the top gear manufacturers shaping the future of mechanical engineering. You'll learn…