Der ultimative Leitfaden zum Riemenantrieb: Maximierung von Effizienz und Leistung
Haben Sie sich jemals gefragt, wie Kraft zwischen Maschinen übertragen wird? Riemenantriebe sind eine einfache, aber geniale Lösung, die den Maschinenbau revolutioniert hat. In diesem Blogbeitrag erkunden wir die faszinierende Welt der Riemenantriebe, von ihren Grundprinzipien bis hin zu ihren vielfältigen Anwendungen. Entschlüsseln Sie mit uns die Geheimnisse, die sich hinter dieser wesentlichen Komponente moderner Maschinen verbergen, und entdecken Sie, wie sie unsere Welt bis heute prägen.
Ein Riemenantrieb ist ein mechanisches Kraftübertragungssystem, das Drehbewegung und Drehmoment von einer Antriebswelle auf eine oder mehrere angetriebene Wellen mit Hilfe eines endlosen, flexiblen Riemens überträgt. Dieses System ist besonders effektiv, wenn die antreibenden und angetriebenen Komponenten räumlich voneinander getrennt sind, was eine effiziente Kraftübertragung über große Entfernungen ermöglicht.
Riemenantriebe bestehen aus mehreren Schlüsselkomponenten:
Antriebsriemenscheibe (an die Stromquelle angeschlossen)
Angetriebene Riemenscheibe(n) (an der Last befestigt)
Treibriemen (das flexible Element)
Spannvorrichtungen (zur Aufrechterhaltung der richtigen Riemenspannung)
Im Vergleich zu anderen mechanischen Getrieben bieten Riemenantriebe mehrere Vorteile:
Vereinfachte Konstruktion und geringere Anschaffungskosten
Geräuscharmer Betrieb durch reduzierten Metall-auf-Metall-Kontakt
Stoßdämpfung und Vibrationsdämpfung
Überlastungsschutz (Riemenschlupf verhindert Schäden an der Maschine)
Einfache Wartung und Riemenwechsel
Möglichkeit, mehrere Wellen mit einer einzigen Stromquelle anzutreiben
Allerdings haben auch Riemenantriebe ihre Grenzen:
Schlupfgefahr bei hoher Belastung oder unter feuchten Bedingungen
Regelmäßige Wartung erforderlich, um die richtige Spannung zu gewährleisten
Eingeschränkte Eignung für Umgebungen mit hohen Temperaturen
Arbeitsprinzip des Riemenantriebs
Das Riemenantriebssystem ist ein grundlegender Kraftübertragungsmechanismus, der aus mehreren Hauptkomponenten besteht: einer Antriebsscheibe, einer angetriebenen Scheibe, einem über beide Scheiben gespannten Treibriemen und einem tragenden Maschinenrahmen, wie in Abbildung 8-1 dargestellt. Diese Anordnung ermöglicht die Übertragung von mechanischer Energie von einer rotierenden Welle auf eine andere durch Reibungskräfte.
Die Antriebsscheibe, die in der Regel an eine Stromquelle wie einen Elektromotor oder einen Verbrennungsmotor angeschlossen ist, setzt das System in Bewegung. Bei ihrer Drehung greift die Oberflächenreibung der Riemenscheibe in den Treibriemen ein, wodurch dieser in Bewegung gerät. Diese Bewegung wird dann auf die angetriebene Riemenscheibe übertragen, die auf der Welle der Maschine oder des Geräts montiert ist, die bzw. das Energie benötigt.
Die Effizienz und Leistung eines Riemenantriebssystems hängt von mehreren Faktoren ab:
Riemenspannung: Die richtige Spannung ist entscheidend für eine optimale Kraftübertragung und die Minimierung des Schlupfes.
Ausrichtung der Riemenscheiben: Die präzise Ausrichtung sorgt für gleichmäßigen Riemenverschleiß und reduziert Vibrationen.
Riemenmaterial und -konstruktion: Verschiedene Materialien und Profile (z. B. Keilriemen, Flachriemen, Zahnriemen) bieten unterschiedliche Eigenschaften für bestimmte Anwendungen.
Verhältnis der Riemenscheibengröße: Dieses bestimmt das Verhältnis von Drehzahl und Drehmoment zwischen der Antriebs- und der Abtriebswelle.
Riemenantriebe bieten Vorteile wie Stoßdämpfung, Geräuschreduzierung und die Möglichkeit, Leistung über große Entfernungen zu übertragen. Sie müssen jedoch regelmäßig gewartet und ausgetauscht werden, da sie sich mit der Zeit abnutzen und dehnen.
Riemenantriebe lassen sich je nach Antriebsprinzip in Reibungs- und Eingriffsantriebe unterteilen. In diesem Artikel werden in erster Linie Fragen im Zusammenhang mit reibschlüssigen Riemenantrieben erörtert.
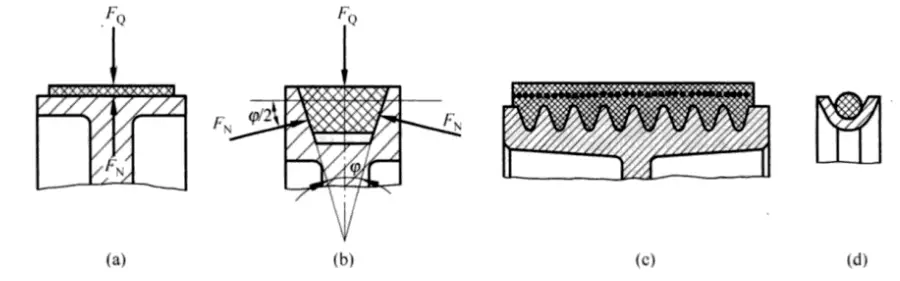
2.1. Bei Reibriemenantrieben erfolgt die Übertragung von Bewegung und Leistung durch die Reibungskraft zwischen dem Antriebsriemen, der fest auf der Riemenscheibe sitzt, und der Kontaktfläche der Riemenscheibe. Anhand der Querschnittsform des Antriebsriemens lassen sie sich weiter in Flachriemen, Keilriemen, Keilrippenriemen und Rundriemen unterteilen.
Abbildung 8-2 Übertragungsart und Querschnittsform des Riemens
2.1.1 Der Querschnitt eines Flachriemens ist rechteckig, und seine Innenfläche, die mit der Riemenscheibe in Berührung kommt, ist die Lauffläche. Er wird hauptsächlich für die Übertragung über große Entfernungen zwischen zwei parallelen, sich in die gleiche Richtung drehenden Wellen verwendet.
2.1.2 Der Querschnitt eines Keilriemens ist trapezförmig, wobei die beiden Seiten, die mit der Scheibenrille in Berührung kommen, als Arbeitsflächen dienen. Die Scheibenrille ist ebenfalls trapezförmig. Die Kraftanalyse an der Keilfläche zeigt, dass bei gleicher Spannung und gleichem Reibungskoeffizienten die vom Keilriemen erzeugte Reibungskraft größer ist als die des Flachriemens.
Daher hat der Keilriemen eine höhere Übertragungskapazität und eine kompaktere Struktur, wodurch er in der mechanischen Übertragung weit verbreitet ist. Je nach ihrer relativen Breite und Höhe können Keilriemen in verschiedene Typen unterteilt werden, z. B. normale Keilriemen, Schmalkeilriemen, Breitkeilriemen, Automobilkeilriemen, Keilriemen mit Verzahnung und Keilriemen mit hohem Winkel. Derzeit sind normale Keilriemen am weitesten verbreitet.
2.1.3 Der Keilrippenriemen, eine Mischung aus Flachriemen und Keilrippenriemen, vereint die Vorteile beider und wird häufig in großen Kraftübertragungssystemen eingesetzt, wo eine kompakte Struktur erforderlich ist.
2.1.4 Der Querschnitt eines Rundriemens ist kreisförmig und wird nur in Getrieben mit geringer Geschwindigkeit und Leistung verwendet, z. B. bei Nähmaschinen und Instrumenten.
2.2 Der Riemenantrieb mit Zahneingriff überträgt Bewegung und Leistung, indem die Zähne des Riemens mit denen der Riemenscheibe ineinandergreifen. Die Synchronriemen Antrieb, wie in Abbildung 8-3 gezeigt, ist ein typisches Beispiel.
Abbildung 8-3 Synchronriemenantrieb
Neben den Vorteilen der Reibriemenübertragung bieten Synchronriemen auch eine hohe Leistungsübertragung und präzise Übersetzungsverhältnisse und werden häufig in Situationen eingesetzt, die eine reibungslose Übertragung und hohe Präzision erfordern, wie z. B. in Tonbandgeräten, Lebensmittelmischern, CNC-Werkzeugmaschinen und Textilmaschinen. Der Querschnitt eines Synchronriemens ist rechteckig, wobei die Innenfläche des Riemens gezahnt ist.
Im Gegensatz zum Aufbau eines Riemens im Reibungsantrieb besteht die Festigkeitsschicht eines Synchronriemens zumeist aus Stahlseilen, was zu einer geringeren Verformung unter Belastung führt. Die Kante der Synchronscheibe ist ebenfalls mit einer Evolventenverzahnung gefertigt, die der Innenfläche des Riemens entspricht und in einem Wälzverfahren durch Evolventenverzahnung hergestellt wird Schneidewerkzeuge. Daher hängen die Abmessungen der Zähne der Riemenscheibe von der Größe der verwendeten Schneidwerkzeuge ab.
Merkmale der Riemenübertragung
Riemenantriebe verfügen über eine ausgezeichnete Elastizität, die es ihnen ermöglicht, Schwingungen effektiv zu dämpfen und zu absorbieren, was eine reibungslose Kraftübertragung bei minimaler Geräuschentwicklung gewährleistet. Bei Überlast dient der kontrollierte Schlupf zwischen Riemen und Riemenscheibe als Schutzmechanismus, der mögliche Schäden an anderen Komponenten des Antriebsstrangs verhindert. Die Einfachheit von Riemenübertragungssystemen erleichtert die Herstellung, Installation und Wartung, was zu kosteneffizienten Lösungen für die Kraftübertragung führt.
Im Betrieb kann es zu einem elastischen Schlupf der Antriebsriemen kommen, was zu leichten Schwankungen des Übersetzungsverhältnisses führen kann. Dieses Phänomen ist zwar im Allgemeinen beherrschbar, verhindert aber die Einhaltung eines streng konstanten Übersetzungsverhältnisses. Riemenantriebe weisen im Vergleich zu anderen Kraftübertragungsmethoden in der Regel größere Gesamtabmessungen auf, was zu einem etwas geringeren Übertragungswirkungsgrad führen kann. Daher werden Riemenantriebe in der Regel für Leistungsübertragungen ≤ 50 kW eingesetzt, wobei die optimale Riemengeschwindigkeit zwischen 5 und 25 m/s liegt. Das empfohlene Übersetzungsverhältnis für einen effizienten Betrieb sollte 5:1 nicht überschreiten. Bei ordnungsgemäßer Auslegung und Wartung können Riemenantriebssysteme Wirkungsgrade zwischen 92% und 97% erreichen.
Elastisches Gleiten und Versagensmodi im Riemenantrieb
Riemenantriebe arbeiten unter dynamischen Bedingungen, bei denen die elastische Verformung eine entscheidende Rolle für die Kraftübertragung und die Zuverlässigkeit des Systems spielt. Der Antriebsriemen, der aus elastomeren Materialien und Verstärkungsfasern besteht, zeigt unter Belastung ein viskoelastisches Verhalten. Wenn Spannung angelegt wird, wird der Riemen elastisch gedehnt, wobei die Größe der Verformung direkt proportional zur angelegten Spannkraft ist.
Während des Betriebs besteht eine Spannungsdifferenz zwischen der straffen Seite (F1) und der schlaffen Seite (F2) des Riemens, wobei F1 > F2 ist. Dieses Spannungsungleichgewicht führt zu einer ungleichmäßigen elastischen Dehnung über die Länge des Riemens. Die straffe Seite erfährt aufgrund der höheren Zugspannung eine größere Dehnung, während die schlaffe Seite eine vergleichsweise geringere Dehnung aufweist. Diese unterschiedliche Dehnung ist entscheidend für die Fähigkeit des Riemens, die Leistung effizient zu übertragen.
Die elastische Beschaffenheit des Gurtes trägt auch zu zwei kritischen Phänomenen bei:
Kriechen: Während sich der Riemen um die Riemenscheiben bewegt, unterliegt er kontinuierlichen Zyklen von Dehnung und Entspannung. Diese zyklische Belastung kann im Laufe der Zeit zu einer allmählichen, dauerhaften Verformung führen, die die Riemenspannung beeinträchtigt und möglicherweise die Übertragungseffizienz verringert.
Elastischer Schlupf: An dem Punkt, an dem der Riemen in die Riemenscheibe eintritt (Annäherungsbogen), nimmt die Geschwindigkeit des Riemens kurzzeitig ab, da er sich dehnt, um die höhere Spannung aufzunehmen. Umgekehrt zieht sich der Riemen am Austrittspunkt (Bogen der Vertiefung) zusammen und beschleunigt leicht. Dieser subtile Geschwindigkeitsunterschied wird als elastischer Schlupf bezeichnet und unterscheidet sich von grobem Schlupf aufgrund unzureichender Spannung.
1. Elastischer Schlupf in Riemenantriebssystemen
Elastischer Schlupf ist ein inhärentes Phänomen bei Riemenantrieben, das während des Arbeitszyklus des Antriebsriemens zwangsläufig auftritt. Dieses komplexe Verhalten ergibt sich aus den elastischen Eigenschaften des Riemenmaterials und den unterschiedlichen Zugkräften entlang des Riemenverlaufs.
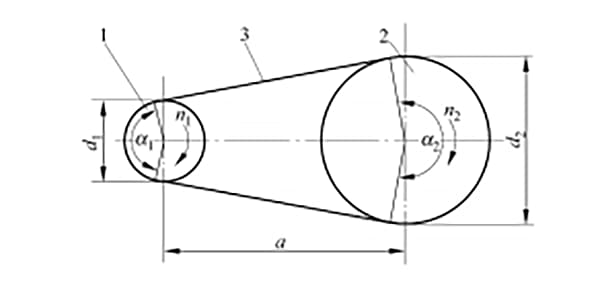
Wenn die straffe Seite des Antriebsriemens an Punkt A in die Antriebsscheibe eingreift, entspricht die Riemengeschwindigkeit (v) zunächst der Umfangsgeschwindigkeit (v1) der Scheibe 1. Während sich die Riemenscheibe 1 jedoch von Punkt A nach Punkt B dreht, nimmt die Spannkraft des Riemens allmählich von F1 auf F2 ab, was zu einer entsprechenden Verringerung der elastischen Dehnung führt. Diese fortschreitende Verkürzung des Riemens führt zu einem geringfügigen relativen Schlupf nach hinten entlang der Riemenscheibe, was zu einer Riemengeschwindigkeit (v) führt, die etwas geringer ist als die Umfangsgeschwindigkeit (v1) der Riemenscheibe 1.
Umgekehrt steigt die Spannung des Riemens an der Schnittstelle mit der angetriebenen Scheibe 2 vom Eintrittspunkt C bis zum Austrittspunkt D durch die Reibungskräfte von F2 zurück auf F1. Dieser Spannungsanstieg führt zu einer allmählichen Längung des Riemens. Infolgedessen tritt auf der Oberfläche der Riemenscheibe 2 ein geringer relativer Vorwärtsschlupf auf, der zu einer Riemengeschwindigkeit (v) führt, die geringfügig über der Winkelgeschwindigkeit (v2) der Riemenscheibe 2 liegt. Dieser unterschiedliche Schlupf aufgrund der elastischen Verformung des Antriebsriemens wird als elastischer Schlupf bezeichnet.
Die Auswirkungen des elastischen Schlupfes sind erheblich:
Riemenverschleiß: Die ständige Relativbewegung zwischen den Oberflächen des Riemens und der Riemenscheibe beschleunigt den Verschleiß und kann die Lebensdauer des Riemens verkürzen.
Wirkungsgrad der Übertragung: Elastischer Schlupf kann zu einer Verringerung der effektiven Drehzahl der angetriebenen Scheibe führen, was das Gesamtübersetzungsverhältnis und den Wirkungsgrad des Systems beeinträchtigt.
Verlustleistung: Die Energie, die durch elastische Verformung und Reibung während des Schlupfes verloren geht, trägt zur Verlustleistung des Systems bei.
Wärmeentwicklung: Die bei der Überwindung der Reibung während des Schlupfes geleistete Arbeit wird in Wärme umgewandelt, was die Materialeigenschaften des Riemens und das Wärmemanagement des Systems beeinträchtigen kann.
Präzisionsanwendungen: In hochpräzisen Maschinen können die kumulativen Auswirkungen des elastischen Schlupfes zu Positionierungsfehlern oder Zeitabweichungen führen.
Um die Auswirkungen des elastischen Schlupfes abzuschwächen, können Ingenieure Strategien wie die Optimierung der Riemenspannung, die Auswahl geeigneter Riemenmaterialien mit geringerer Elastizität oder die Implementierung aktiver Spannsysteme in kritischen Anwendungen anwenden. Das Verständnis und die Berücksichtigung des elastischen Schlupfes sind entscheidend für die Konstruktion und Wartung effizienter und zuverlässiger Riemenantriebssysteme in verschiedenen industriellen Anwendungen.
2. Ausfallmodi des Riemenantriebs
Die wichtigsten Ausfallarten während des Betriebs eines Riemenantriebssystems sind Riemenschlupf auf der Riemenscheibe, beschleunigter Riemenverschleiß und ermüdungsbedingter Ausfall. Jede dieser Arten kann die Leistung und Zuverlässigkeit des Systems erheblich beeinträchtigen:
Riemenschlupf: Tritt auf, wenn die Reibung zwischen dem Riemen und der Riemenscheibe nicht ausreicht, um das erforderliche Drehmoment zu übertragen. Dies kann auf eine unzureichende Riemenspannung, Überlastung oder Verschmutzung der Kontaktflächen zurückzuführen sein. Schlupf führt zu einer geringeren Effizienz der Kraftübertragung, erhöhtem Verschleiß und möglicher Wärmeentwicklung.
Beschleunigter Riemenverschleiß: Kennzeichnend ist die allmähliche Verschlechterung des Riemenmaterials, die sich häufig in Form von Rissen, Ausfransungen oder Materialverlusten äußert. Zu den Faktoren, die zu beschleunigtem Verschleiß beitragen, gehören Fehlausrichtung, übermäßige Spannung, Umweltbedingungen (z. B. Hitze, chemische Belastung) und abrasive Verunreinigungen. Durch den Verschleiß verringert sich die Querschnittsfläche des Riemens, wodurch seine Tragfähigkeit geschwächt wird.
Ermüdungsbedingtes Versagen: Entsteht durch sich wiederholende Belastungszyklen, wenn sich der Riemen ständig um die Scheiben biegt. Diese Versagensart wird von Faktoren wie der Riemenkonstruktion, dem Scheibendurchmesser, der Betriebsgeschwindigkeit und der Spannung beeinflusst. Ermüdung äußert sich typischerweise in Form von Querrissen oder der Trennung von Riemenlagen, was zu einem plötzlichen Riss des Riemens führt.
Zu den weniger häufigen, aber ebenso kritischen Fehlerarten gehören:
Beschädigte Riemenscheiben: Abgenutzte oder beschädigte Riemenscheiben können den Riemenverschleiß beschleunigen und die Wahrscheinlichkeit von Schlupf erhöhen.
Versagen des Spanners: Bei Systemen mit automatischen Spannern kann ein Ausfall dieser Komponente zu einer falschen Riemenspannung und nachfolgenden Systemausfällen führen.
2.1 Schlüpfrigkeit
Riemenantriebe arbeiten mit Reibung. Wenn bei konstanter Vorspannkraft F₀ die wirksame Umfangskraft F die Grenzreibungskraft zwischen dem Riemen und der Radoberfläche übersteigt, kommt es zu einem deutlichen Gleiten des Riemens auf der Radoberfläche, was als Schlupf bezeichnet wird.
Wenn der Riemen durchrutscht, dreht sich zwar die treibende Scheibe weiter, aber sowohl die getriebene Scheibe als auch der Riemen verlieren erheblich an Geschwindigkeit oder kommen sogar ganz zum Stillstand. Schlupf ist ein nachteiliges Phänomen, da es zum Ausfall des Antriebs führt und den Riemenverschleiß verschlimmert. Bei normalem Betrieb sollte Schlupf vermieden werden.
Elastisches Gleiten und Schlupf sind zwei völlig unterschiedliche Konzepte. Ihre Unterschiede sind in Tabelle 8-1 dargestellt.
Tabelle 8-1 Unterschiede zwischen elastischem Gleiten und Rutschen
Artikel
Elastisches Gleiten
Abrutschen
Phänomen
Das Gleiten des lokalen Riemens auf der lokalen Radoberfläche
Relatives Gleiten zwischen dem Riemen und der Radoberfläche über den gesamten Kontaktbogen
Ursachen für das Auftreten
Spannungsunterschied auf beiden Seiten des Bandes
Die effektive Zugkraft erreicht oder übersteigt die Endreibungskraft zwischen dem Riemen und der Radoberfläche
Die Belastung des Transmissionsriemens variiert während des Betriebs und bildet eine Wechselspannung. Je höher die Drehzahl und je kürzer der Riemen, desto häufiger wickelt sich der Riemen pro Zeiteinheit um die Riemenscheibe, was zu häufigeren Spannungsänderungen führt. Im Laufe der Zeit kann die wiederholte Wirkung der Wechselbeanspruchung dazu führen, dass sich der Riemen ablöst und reißt, was schließlich zu einem Ermüdungsbruch und damit zu einem Ausfall des Getriebes führt.
Spannvorrichtungen für Riemenantriebe
Der auf die Riemenscheibe aufgelegte Transmissionsriemen sollte eine bestimmte Spannung aufweisen, um den normalen Betrieb des Riemenantriebs zu gewährleisten. Nach einer gewissen Betriebszeit kann die plastische Verformung des Riemens jedoch zu einem Durchhängen führen, wodurch sich die ursprüngliche Spannung allmählich verringert und die Tragfähigkeit des Riemens nachlässt.
Um die Vorspannung des Antriebsriemens zu kontrollieren und die Betriebsfähigkeit des Riementriebs zu gewährleisten, muss eine geeignete Spannvorrichtung verwendet werden. In Abbildung 8-11 sind einige häufig verwendete Spannvorrichtungen dargestellt.
1. Periodische Spannvorrichtung
Bei horizontal angeordneten oder mäßig geneigten Riemenantrieben kann eine Spannvorrichtung wie in Abbildung 8-11(a) gezeigt verwendet werden. Die Position des mit einer Riemenscheibe ausgestatteten Motors wird mit einer Schraube eingestellt, um die AchsabstandDadurch wird das Spannen erreicht. Die Einstellmethode besteht darin, den Motor auf einer Gleitschiene zu montieren, und beim ersten Spannen des Riemens wird der Motor mit der Einstellschraube in die gewünschte Position geschoben.
Bei vertikalen oder nahezu vertikalen Riemenantrieben kann eine Spannvorrichtung, wie in Abbildung 8-11(b) dargestellt, verwendet werden. Durch Einstellen der Position des Schwenkrahmens (Motorwellenmitte) wird der Achsabstand vergrößert, um eine Spannung zu erreichen. Bei der Einstellmethode wird die Mutter an der Schraube verstellt, so dass das Maschinengestell um die feste Stützwelle schwingt, um die Vorspannung einzustellen. Sobald die Position eingestellt ist, muss die Mutter gesichert werden.
2. Automatische Spannvorrichtung
Abbildung 8-11(c) zeigt eine automatische Spannvorrichtung, bei der der mit einer Riemenscheibe versehene Motor auf einem schwimmenden Schwenkrahmen montiert ist. Unter Ausnutzung des Gewichts des Motors und des Schwenkrahmens schwingen die Riemenscheibe und der Motor um die feststehende Trägerwelle und passen den Achsabstand automatisch an, um die Spannung zu erreichen. Diese Methode wird üblicherweise für Riemenantriebe mit geringer Leistungsübertragung und nahezu vertikaler Anordnung verwendet.
Abbildung 8-11(e) zeigt ein Spannrad, das durch ein Gewicht automatisch auf den Riemen drückt und so eine Spannung erreicht. Diese Methode wird häufig in Flachriemenantrieben mit großem Übersetzungsverhältnis und kleinem Achsabstand eingesetzt und hat einen erheblichen Einfluss auf die Lebensdauer des Riemens.
3. Verwendung der Spannvorrichtung der Spannrolle
Wenn der Achsabstand des Riementriebs nicht eingestellt werden kann, kann eine Spannrolle zum Spannen des Riemens verwendet werden, wie in Abbildung 8-11(d) gezeigt. Die Spannrolle wird in der Regel auf der Innenseite der schlaffen Seite installiert, damit der Riemen eine unidirektionale Biegung erfahren kann. Um zu verhindern, dass sich der Umschlingungswinkel der kleinen Riemenscheibe zu stark verringert, sollte die Spannrolle so nah wie möglich an der großen Riemenscheibe installiert werden.
Besondere Anforderungen an den Riemenantrieb
1. Die lineare Geschwindigkeit des Keilriemens sollte 25 Meter pro Sekunde nicht überschreiten, und die lineare Geschwindigkeit des Flachriemens beträgt im Allgemeinen 10-20 Meter pro Sekunde. In besonderen Fällen kann sie reduziert werden. Die lineare Riemengeschwindigkeit kann mit der folgenden Formel berechnet werden:
V = πDn / 60 x 1000 (Meter/Sekunde)
Wo
V- Lineare Bandgeschwindigkeit, (Meter/Sekunde)
D- Riemenscheibendurchmesser, (mm)
n- Drehzahl der Riemenscheibe, (U/min)
2. Der Flachriemen sollte pro Sekunde nicht öfter als 3 bis 5 Mal an der kleinen Riemenscheibe vorbeigeführt werden (C), der Keilriemen nicht öfter als 20 Mal.
C = V / L (Zeiten / Sekunde)
Wobei L- Länge des Riemens (m)
3. Der Umschlingungswinkel der kleinen Keilriemenscheibe sollte nicht weniger als 120° (150° beim Flachriemen) betragen, andernfalls sollte der Durchmesserunterschied zwischen den beiden Riemenscheiben verringert, der Achsabstand vergrößert oder eine Druckscheibe eingebaut werden.
4. Der Durchmesser der kleinen Riemenscheibe sollte nicht zu klein sein, um eine übermäßige Biegung des Riemens zu vermeiden, die seine Lebensdauer verkürzt.
Bei Flachriemenantrieben sollte der Durchmesser der kleinen Riemenscheibe in der Regel mehr als das 25-30fache der Dicke des Gewebebandes betragen.
Der Mindestdurchmesser der kleinen Flachriemenscheibe, D_min, lässt sich nach folgender Formel berechnen:
Dmin = C³√N / n1 (mm)
Wo
C- Berechnungskoeffizient, C = 1150-1400
N- Sendeleistung (kw)
n1- Drehzahl der Riemenscheibe (U/min)
Bei Keilriemenantrieben sollte der Durchmesser der kleinen Keilriemenscheibe nicht kleiner als die folgenden Werte sein. Andernfalls ist der Umschlingungswinkel nicht ausreichend, und der Riemen neigt zu Schlupf und Beschädigung.
Keilriemen Modell
O
A
B
C
D
E
F
Mindestdurchmesser der kleinen Riemenscheibe (mm)
70
100
148
200
315
500
800
5. Der Achsabstand von Flachriemenscheiben sollte mehr als das Doppelte der Summe der beiden Raddurchmesser betragen; der Achsabstand von Keilriemenscheiben sollte mehr als die Hälfte der Summe der beiden Raddurchmesser betragen, jedoch nicht mehr als das Doppelte der Summe.
6. Die Riemenlänge L kann nach der folgenden Formel berechnet werden:
In der Formel steht A für den Achsabstand zwischen den beiden Riemenscheiben (mm), und D2 und D1 bezeichnen die Durchmesser der großen bzw. kleinen Riemenscheibe (mm).
7. Die Vorspannung des Riemens sollte mit einer Kraft von ca. 16-18 kg pro Quadratzentimeter Riemenquerschnittsfläche angezogen werden.
Auswahl des Riementyps und der Anzahl der Wurzeln
1. Bei Flachriemenantrieben kann die Querschnittsfläche des Riemens auf der Grundlage der für die Übertragung verwendeten Leistung und der linearen Geschwindigkeit des Riemens berechnet werden.
F=P/K (cm²)
In dieser Formel,
F - die Querschnittsfläche des Bandes (cm²)
P - die Arbeitsspannung des Riemens (kg)
P=102×N/V.
Dabei steht N für die Motorleistung (kw) und V für die lineare Geschwindigkeit des Riemens (m/s).
K steht für die tatsächliche effektive Spannung, kg/cm². Für Gummigurte kann K im Bereich von 10-25 kg/cm² gewählt werden. Wenn die lineare Geschwindigkeit hoch ist, die Lasteinwirkung groß ist, die Startlast groß ist, die kontinuierliche Arbeitszeit lang ist und der Umschlingungswinkel klein ist, kann ein kleinerer Wert gewählt werden; ansonsten kann ein größerer Wert gewählt werden.
Anhand der berechneten Querschnittsfläche lassen sich die Breite und Dicke des Gurtes bestimmen. Da jede Lage des Gurtes etwa 1,2 mm dick ist, kann die Anzahl der Lagen in einem Flachriemen näherungsweise bestimmt werden.
2. Bei Keilriemenübertragungen können Sie anhand der folgenden Tabelle den Keilriementyp anhand der übertragenen Leistung bestimmen.
Der Leistungsbereich, der für verschiedene Keilriementypen gilt.
Leistungsübertragung (kW)
0.4-0.75
0.75-2.2
2.2-3.7
3.7-7.5
7.5-20
20-40
40-75
75-150
über 150
Empfohlenes Modell
O
O、A
O,A,B
A,B
B,C
C,D
D,E
E,F
F
Die Anzahl der Keilriemen, Z, kann nach folgender Formel berechnet werden:
Z = N / (Z0 * C1 * C2) ^ 0,5
Wo:
N ist die übertragene Leistung (kW);
Z0 ist die von einem einzelnen Keilriemen übertragene Leistung, die anhand der nachstehenden Tabelle ermittelt werden kann;
C1 ist der Umschlingungswinkelkoeffizient, der durch den Umschlingungswinkel des Riemens bestimmt wird.
Bandumschlingungswinkel a°
180
170
160
150
140
130
120
110
100
C1
1.0
0.97
0.94
0.91
0.88
0.85
0.82
0.79
0.76
C2 - Arbeitsbedingungskoeffizient; 0,6-0,7.
Abmessungen der Keilriemenscheibenrille.
Die Abmessungen der Rille der Keilriemenscheibe (siehe Abbildung) sind der nachstehenden Tabelle zu entnehmen.
Leistung (in kW), die von einem einzelnen Keilriemen übertragen wird.
Modell
Kleiner Riemenscheibendurchmesser D1 (mm)
Bandgeschwindigkeit (m/s)
5
10
15
20
O
50~63
0.31
0.59
0.88
1.07
80
0.38
0.74
1.04
1.29
>90
0.42
0.82
1.14
1.40
A
80~90
0.59
1.04
1.32
1.33
100
0.66
1.18
1.51
1.64
>125
0.81
1.47
1.87
2.21
B
125
1.02
1.84
2.43
2.58
140
1.12
2.06
2.80
3.10
>180
1.32
2.41
3.28
3.94
C
2OO
1.98
3.60
4.80
5.52
250
2.41
4.45
6.14
7.00
>280
2.67
4.95
6.77
7.72
D
315
3.98
7.00
9.20
9.95
400
5.07
9.10
12.30
14.40
>450
5.45
9.95
13.30
15.40
Abmessungsdiagramm der Rillen der Keilriemenscheibe
Bei der Berechnung des Übersetzungsverhältnisses bezieht sich der Durchmesser der Riemenscheibe auf die Position D im Diagramm, nicht auf den äußeren Rand der Scheibe. Außerdem ist zu berücksichtigen, dass der Riemen einen Schlupf von 1% hat.
Abmessungen der Rille der Keilriemenscheibe:
Abmessungen der Rille (mm)
Modell
O
A
B
C
D
E
F
a
10
13
17
22
32
38
50
ι
10
13
17
22
30
36
48
c
3
4
5
7
9
12
16
t
12
16
21
27
38
44
58
s
9
12
15
18
23
26
32
Entsprechender Schlitzwinkel φ
Mindestdurchmesser der Keilriemenscheibe (in Millimetern)
Als Gründer von MachineMFG habe ich mehr als ein Jahrzehnt meiner Karriere der metallverarbeitenden Industrie gewidmet. Meine umfangreiche Erfahrung hat es mir ermöglicht, ein Experte auf den Gebieten der Blechverarbeitung, der maschinellen Bearbeitung, des Maschinenbaus und der Werkzeugmaschinen für Metalle zu werden. Ich denke, lese und schreibe ständig über diese Themen und bin stets bestrebt, in meinem Bereich an vorderster Front zu bleiben. Lassen Sie mein Wissen und meine Erfahrung zu einem Gewinn für Ihr Unternehmen werden.
Stellen Sie sich vor, Sie könnten die Präzision von Werkzeugmaschinen mit einer einfachen Glasoberfläche erreichen. Lineare Gittermaßstäbe tun genau das, indem sie feine Linien in hochgenaue Messungen umwandeln. In diesem Artikel wird untersucht, wie diese...
Haben Sie sich jemals gefragt, wie scharfe Kanten an Metallteilen geglättet werden? Durch dieses Verfahren, das als Fasen bezeichnet wird, werden gefährliche, gezackte Ecken in sichere, gewinkelte Oberflächen verwandelt. In diesem Artikel erfährst du,...
Haben Sie sich jemals gefragt, welche Lagermarken die besten der Welt sind? In diesem Blogbeitrag stellen wir Ihnen die Top-Lagerhersteller vor, die für ihre außergewöhnliche Qualität, Innovation und...
Haben Sie sich jemals gefragt, wer die Welt hinter den Kulissen mit Strom versorgt? In diesem Blogbeitrag werden wir einen tiefen Einblick in die wichtigsten Generatorhersteller geben, die die Lichter am Leuchten halten...
Sind Sie ein angehender Maschinenbauingenieur, der sich in seinem Fachgebiet profilieren möchte? In diesem Blogbeitrag stellen wir Ihnen die 10 wichtigsten Konstruktionsprogramme für den Maschinenbau vor, mit denen Sie Ihre...
Haben Sie sich schon einmal gefragt, wie die Unversehrtheit von geschweißten Muttern und Schrauben in Ihrem Auto sichergestellt wird? Dieser Artikel enthüllt den akribischen Prozess der Qualitätsprüfungen und Inspektionen, die Ihr Fahrzeug...
Haben Sie sich jemals gefragt, wie ein Elektromotor reibungslos läuft, ohne zu überhitzen? Die Kenntnis der sicheren Betriebstemperaturen für Motoren ist entscheidend für deren Langlebigkeit und Leistung. In diesem Artikel,...
Haben Sie sich schon einmal Gedanken über die faszinierende Welt des Gießens gemacht? Dieses uralte und sich ständig weiterentwickelnde Herstellungsverfahren prägt unser tägliches Leben auf unzählige Arten. In diesem Blogbeitrag erkunden wir die...
Haben Sie sich jemals gefragt, wie die Zahnräder in Ihrem Auto oder Flugzeug so reibungslos funktionieren? Dieser Artikel stellt die wichtigsten Getriebehersteller vor, die die Zukunft des Maschinenbaus gestalten. Sie erfahren...