Der ultimative Leitfaden zu Drehgebern: Typen, Anwendungen und Vorteile
Haben Sie sich jemals gefragt, wie Maschinen ihre Position und Geschwindigkeit genau bestimmen können? Dieser Artikel befasst sich mit der faszinierenden Welt der Drehgeber, Sensoren, die für die Erfassung mechanischer Bewegungen entscheidend sind. Sie erfahren etwas über die verschiedenen Arten von Drehgebern, ihre Funktionsprinzipien und ihre Anwendungen in modernen Maschinen. Machen Sie sich bereit, die Geheimnisse hinter der Präzision von Motorsteuerungen und mehr zu lüften!
Drehgeber sind eine Art von Sensoren, die in erster Linie zur Erfassung von Geschwindigkeit, Position, Winkel, Abstand oder Anzahl mechanischer Bewegungen verwendet werden.
Viele Motorsteuerungen, wie z. B. Servomotoren, werden nicht nur in Maschinen eingesetzt, sondern benötigen auch Encoder, um Rückmeldungen für die Kommutierung, die Geschwindigkeit und die Positionserkennung an die Motorsteuerung zu liefern.
2. Klassifizierung von Encodern
Der Encoder kann in analoge und digitale Encoder unterteilt werden. Analoge Geber können weiter in Drehgeber und Sin/Cos-Geber unterteilt werden, während digitale Geber in Inkrementalgeber und Absolutwertgeber unterteilt werden können.
3. Funktionsprinzipien gängiger Drehgeber
3.1 Prinzip der digitalen Drehgeber
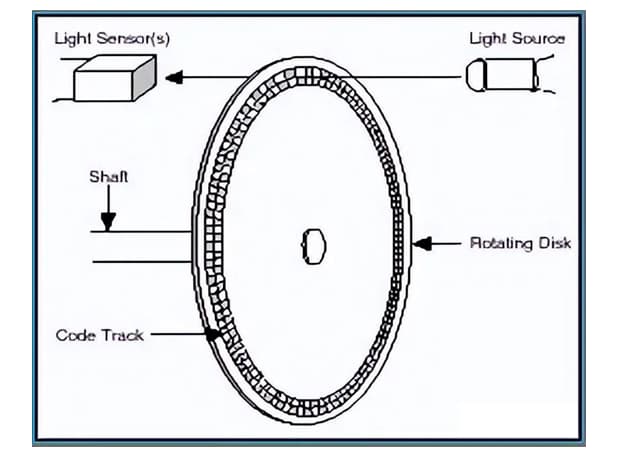
1)Verwenden Sie Lichtschranken zum Abtasten einer segmentierten Scheibe, die auf einer mechanischen Welle installiert ist.
Der mechanische Code wird in proportionale elektrische Impulssignale umgewandelt.
Die Lichtquelle (im Allgemeinen eine LED) sendet einen schmalen Lichtstrahl in Richtung des Empfängers (der eine Fotodiode sein kann). Sowohl die Lichtquelle als auch der Empfänger sind fest in das rotierende Verbindungslager eingebaut.
Der Geber ist eine durchsichtige Scheibe mit einer Öffnung oder einem Fenster, die im rotierenden Teil des Lagers eingebaut ist.
3.2 Prinzip der fotoelektrischen digitalen Drehgeber
Wenn sich das Lager dreht, lässt der Encoder den Lichtstrahl abwechselnd durch (durch das kleine Fenster auf der Scheibe).
Die Fotodiode gibt bei Positionsänderungen entsprechende Signale mit hohem oder niedrigem Pegel aus. Das Ausgangssignal der Fotodiode kann durch eine spezielle Schaltung in Positions- und Geschwindigkeitsinformationen umgewandelt werden.
3.2.1 Ausgang von Inkrementalgebern
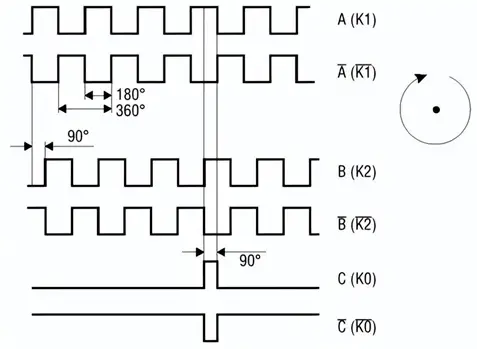
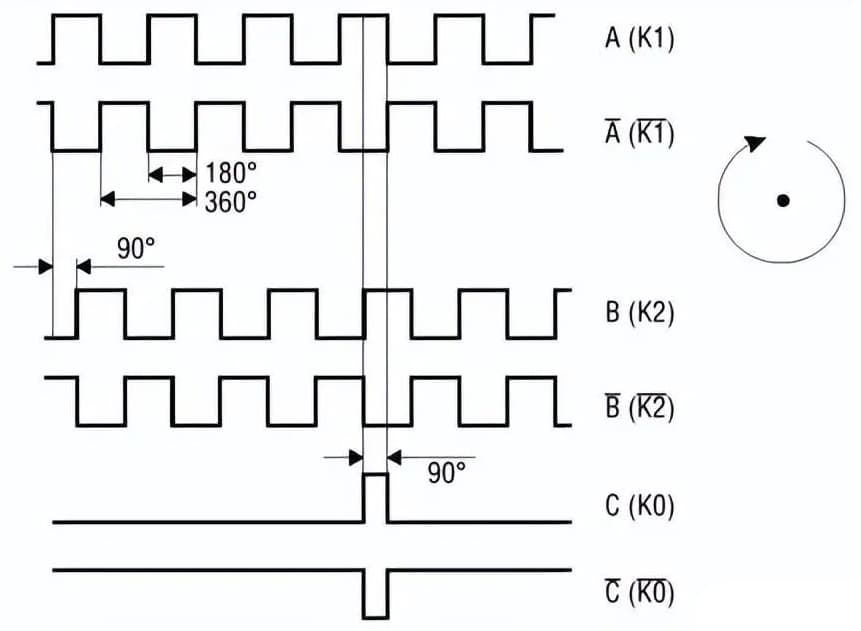
Der Ausgang des Inkrementalgebers besteht aus einer fotoelektrischen Scheibe mit kreisförmigen transparenten und undurchsichtigen Markierungen, die von fotoelektrischen Sende- und Empfangskomponenten gelesen werden, um Rechtecksignale zu erhalten, die als A, B, -A, -B kombiniert werden.
Jedes Signalpaar hat eine Phasendifferenz C von 90 Grad (ein Zyklus entspricht 360 Grad).
Darüber hinaus gibt es ein Nullpunkt-Kalibrierungssignal, und der Encoder gibt ein Signal pro Umdrehung der Scheibe aus.
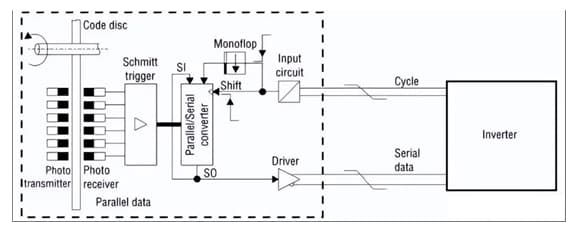
Ausgangsschaltbild eines Inkrementalgebers
3.2.2 Anschlussprinzipien von Inkrementalgebern
1. Einphasiger Anschluss
Wird für die eindirektionale Zählung und die unidirektionale Geschwindigkeitsmessung verwendet.
2. Zweiphasiger Anschluss A-B
Wird für bidirektionale Zählung und Bestimmung von Richtung und Geschwindigkeit verwendet.
3. Dreiphasiger Anschluss A-B-C
Dient zur Bestimmung der Geschwindigkeit mit Korrektur der Referenzposition.
Die A-A-B-B-C-C-Verbindung hat einen symmetrischen negativen Signalverbindungsstrom, der eine minimale Dämpfung und starke Anti-Interferenz aufweist und über große Entfernungen ausgegeben werden kann.
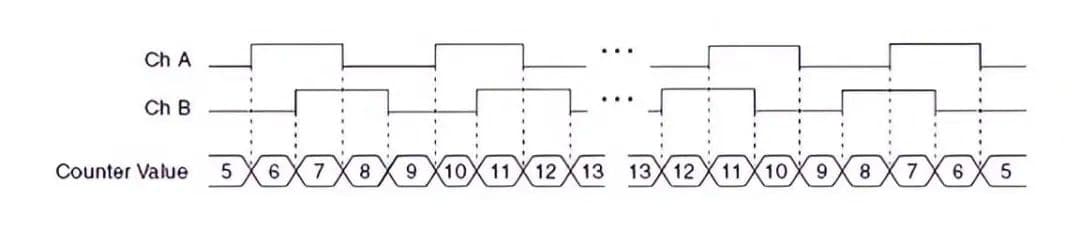
Wie man die Richtung bestimmt
Da A und B um 90 Grad phasenverschoben sind, kann die Richtung bestimmt werden, indem festgestellt wird, ob A oder B zuerst auftritt.
So führen Sie die Kalibrierung der Nullposition durch
Bei der Übertragung von Geberimpulsen können aus Gründen wie z. B. Interferenzen Fehler auftreten, die zu Übertragungsfehlern führen.
Zu diesem Zeitpunkt ist eine rechtzeitige Kalibrierung der Nullposition erforderlich.
Der C-Geber gibt bei jeder Umdrehung einen Impuls aus, der als Nullimpuls oder Identifikationsimpuls bezeichnet wird und zur Bestimmung der Null- oder Identifikationsposition dient.
Um den Nullimpuls unabhängig von der Drehrichtung genau zu messen, wird der Nullimpuls als Hochpegel-Kombination von zwei Kanälen ausgegeben.
Aufgrund der Phasendifferenz zwischen den Kanälen ist der Nullimpuls nur halb so lang wie der Impuls.
Schematische Darstellung der Nullpunktskorrektur
3.2.3 Multiplikator von Inkrementalgebern
Eine feinere und präzisere physikalische Unterteilung der Codierscheibe ist aufgrund technologischer und abtasttechnischer Beschränkungen nicht möglich.
Durch die Umwandlung in digitale Schaltungen können jedoch höhere Impulse erzielt werden.
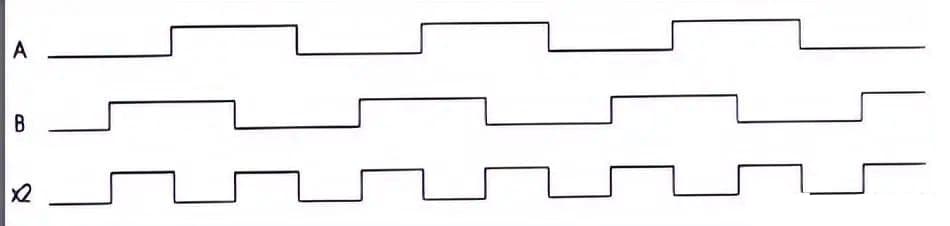
Doppelfrequenzsignal
Erhalten durch "exklusive oder" Umwandlung von A- und B-Phasen.
Vierfach-Frequenzsignal
Der Zähler erhöht oder verringert sich ebenfalls an jeder Flanke der Kanäle A und B. Die Richtung des Zählers wird dadurch bestimmt, welcher Kanal dem anderen vorauseilt.
Die Zahl im Zähler erhöht oder verringert sich in jedem Zyklus um 4.
3.2.4 Merkmale von Inkrementalgebern
Der Drehgeber gibt für jeden voreingestellten Drehwinkel ein Impulssignal aus, und der Drehwinkel wird durch Zählen der Anzahl der Impulssignale berechnet.
Daher sind die vom Encoder ausgegebenen Positionsdaten relativ.
Da ein festes Impulssignal verwendet wird, kann die Startposition des Drehwinkels beliebig festgelegt werden.
Aufgrund der Verwendung der relativen Kodierung gehen die Drehwinkeldaten verloren und müssen nach einem Stromausfall neu eingestellt werden.
3.2.5 Probleme mit inkrementalen Drehgebern
1) Inkrementale Drehgeber haben kumulative Nullpunktfehler.
2) Sie haben eine schlechte Anti-Interferenz-Fähigkeit.
3) Nach Stromausfällen oder Abschaltungen muss das Empfangsgerät ausgeschaltet und die Referenzposition wiedergefunden werden.
Mit dem Aufkommen der Absolutwertgeber werden diese Probleme gelöst.
3.3 Prinzip des Absolutwertgebers
Ein Absolutwertgeber hat eine Lichtcodescheibe mit mehreren eingravierten Lichtkanälen und Linien.
Jeder Kanal wird nacheinander mit 2, 4, 8, 16 usw. Zeilen kodiert.
An jeder Position des Encoders werden die Lichtkanäle gelesen und ihr Ein/Aus-Zustand wird verwendet, um einen eindeutigen Binärcode zu erhalten, der als Gray-Code bekannt ist und von 2^0 bis 2^(n-1) reicht, wobei n die Anzahl der Bits des absoluten Encoders ist.
Die Position des Encoders wird mechanisch durch die Lichtcodescheibe bestimmt, so dass sie nicht durch Stromausfälle oder Störungen beeinträchtigt wird.
3.3.1 Absolute Drehgeber-Codescheibe
Die Lichtcodescheibe wird von einer Gruppe von Fotokopplern abgetastet, um den eindeutigen Code an jeder Position zu erhalten. Jede Position hat ihren eigenen eindeutigen Code.
Benachbarte ganze Zahlen in der numerischen Darstellung haben nur einen Unterschied, wodurch das Auftreten von großen Stromspitzen in der digitalen Umwandlungsschaltung vermieden werden kann (z. B. 3-4, 0011-0100).
Binär-Graustufen-Konvertierungsformat:
Die höheren Ziffern werden beibehalten, und die zweithöchste Ziffer wird durch eine "Exklusiv-Oder"-Verknüpfung der höheren Ziffern und der zweithöchsten Ziffer (in binärer Form) ermittelt.
Referenz für Dezimal- und Gray-Codes.
Dezimal
Grauer Code
0
0000
1
0001
2
0011
3
0010
4
0110
5
0111
6
0101
7
0100
Dezimal
Grauer Code
8
1100
9
1101
10
1111
11
1110
12
1010
13
1011
14
1001
15
1000
3.3.2 Ausgabeformate von Absolutwertgebern
1. Paralleler Ausgangsmodus
In diesem Modus gibt es ein Kabel für jedes Datenbit (Bitkanal), und der Signalpegel (hoch oder niedrig) auf jedem Kabel stellt eine 1 oder eine 0 dar.
Das physikalische Gerät ähnelt einem Inkrementalgeber und verfügt über verschiedene Typen, wie z. B. Collector Open PNP, NPN, Differential Drive, Push-Pull und Differential High oder Low Effective, basierend auf dem physikalischen Geräteformat.
Die parallele Ausgabe erfolgt im Allgemeinen in Form eines Gray-Codes, auch Gray-Code-Codierer genannt.
2. Synchrone serielle Schnittstelle (SSI) Ausgang
In diesem Modus werden die Daten konzentriert und über eine Gruppe von Kabeln übertragen. Die Datenausgabe wird durch ein Kommunikationsprotokoll geregelt, das den Zeitplan festlegt.
Die serielle Ausgabe benötigt weniger Verbindungsleitungen und kann über größere Entfernungen übertragen werden, was den Schutz und die Zuverlässigkeit des Drehgebers erheblich verbessert.
High-Bit-Absolutwertgeber und Multiturn-Absolutwertgeber verwenden in der Regel einen seriellen Ausgang.
3. Asynchrones serielles Format
In diesem Modus werden Anweisungen und Daten durch Frage und Antwort ausgetauscht, und die Schnittstelle ist duplex. Ein typisches Beispiel ist die RS485-Schnittstelle, die nur zwei Kabel benötigt.
Der Dateninhalt kann der Positionswert des Encoders oder ein anderer vom Befehl geforderter Inhalt sein.
Wenn zum Beispiel für jeden Geber eine Adresse hinzugefügt wird, können sich mehrere Geber das Übertragungskabel und den anschließenden Empfang teilen. Diese Form wird als Feldbustyp bezeichnet.
4. Prinzip des Hybrid-Encoders
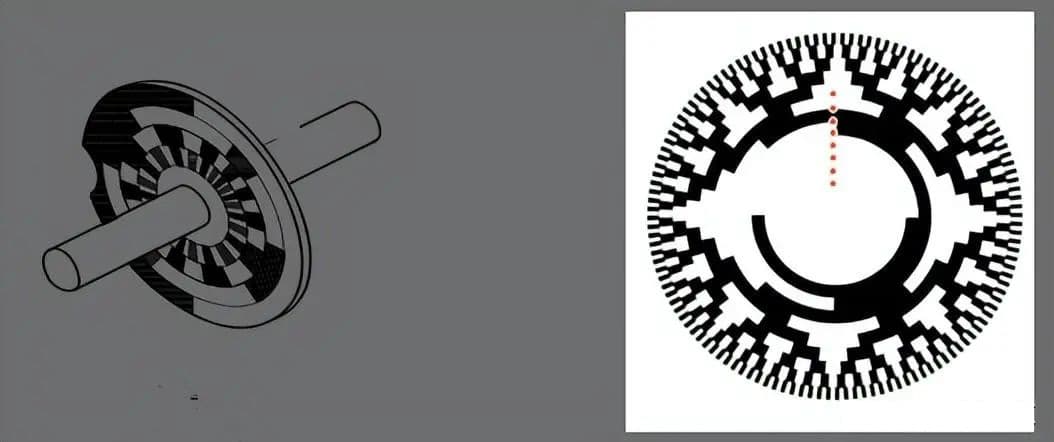
Die inkrementelle Kodierung und die absolute Kodierung sind beide auf derselben Festplatte integriert.
Der äußerste Kreis der Scheibe enthält Inkrementalstreifen hoher Dichte, während der mittlere Teil der binäre Gray-Code-Kanal des Absolutwertgebers ist.
Die Drehung der Scheibe wird durch Zählen der Anzahl der Impulse pro Umdrehung angezeigt, und der innerhalb einer Woche gedrehte Winkel wird anhand des numerischen Werts des Gray-Codes gezählt.
Multiturn-Absolutwertgeber: Basierend auf dem Single-Turn-Absolutwertgeber wird das Prinzip des Taktgetriebes verwendet, um die Drehung der zentralen Scheibe auf einen anderen Satz von Scheiben (oder mehrere Sätze von Zahnrädern und Scheiben) durch Zahnradübertragung zu übertragen, was die Codierung der Anzahl der Umdrehungen auf der Grundlage der Single-Turn-Codierung hinzufügt, um den Messbereich des Gebers zu erweitern.
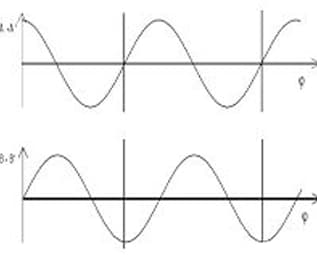
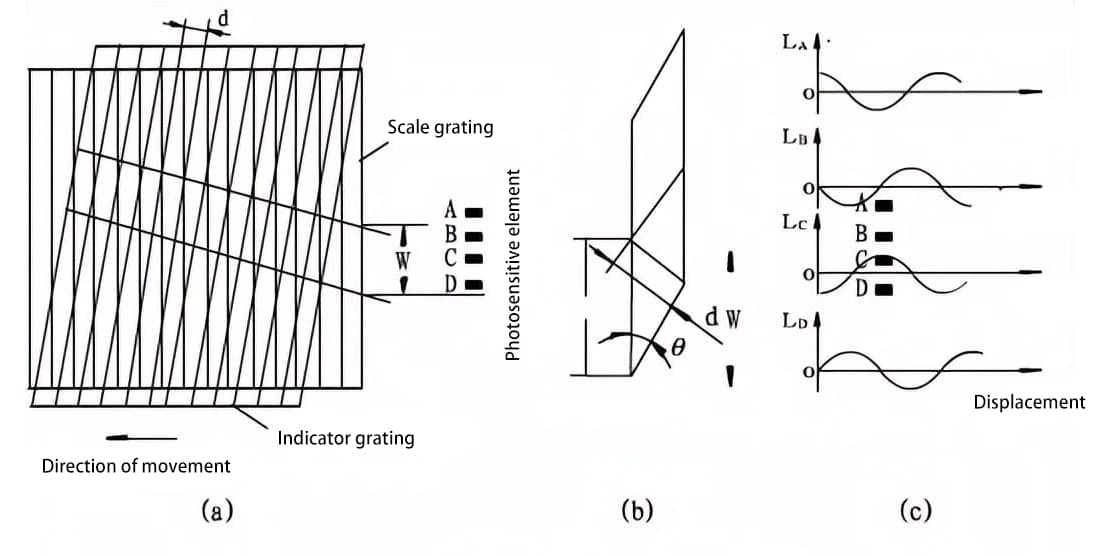
Wenn paralleles Licht durch ein Gitter fällt, nähert sich die Intensität der erzeugten Moiré-Streifen einer Kosinusfunktion an.
Durch die Anordnung von vier 1/4-Moiré-Streifen lichtempfindlicher Elemente in Richtung der Moiré-Streifenbewegung können vier Sätze von Sinus- und Cosinus-Ausgangssignalen erhalten werden.
Ausgangsform des Sinus-Cosinus-Encoders
Abbildung Funktionsprinzip eines Gitters
Linearer Drehgeber
Ein Längenmessgerät misst den linearen Verfahrweg eines Objekts und wandelt den gemessenen Weg in ein elektrisches Impulssignal um.
Vereinfacht ausgedrückt besteht das Prinzip darin, die Scheibe eines Drehgebers in eine gerade Linie zu dehnen.
Gittermaßstab Encoder
Das Funktionsprinzip des Gitterverschiebungssensors besteht darin, dass bei einer relativen Verschiebung des Hauptgitters (d. h. des Skalengitters) und des Hilfsgitters (d. h. des Indikatorgitters) im Gitterpaar durch Interferenz und Beugung des Lichts ein regelmäßiges schwarz-weißes (oder hell-dunkles) Streifenmuster entsteht, das als Moiré-Saum bezeichnet wird.
Die schwarz-weißen (oder hell-dunkel) Streifen, die gleich sind, werden durch fotoelektrische Geräte in elektrische Signale umgewandelt, die sich durch Sinuswellen verändern.
Nach Verstärkung und Formung durch Formungsschaltungen erhält man zwei Sinus- oder Rechtecksignale mit einer Phasendifferenz von 90 Grad, die zur Zählung und Anzeige an die digitale Gitteranzeige gesendet werden.
Drehbarer Transformator
Ein Drehübertrager, auch Resolver genannt, ist ein Mikromotor, der zu Steuerungszwecken eingesetzt wird.
Es handelt sich um ein indirektes Messgerät, das die mechanische Drehung in ein elektrisches Signal umwandelt, das durch eine bestimmte mathematische Funktion mit dem Drehwinkel verbunden ist.
Prinzip des Drehtransformators
1. Ein Drehtransformator ist eine Signalkomponente, die eine Spannung ausgibt, die sich mit dem Rotorwinkel ändert.
Wenn die Erregerwicklung mit einer Wechselspannung einer bestimmten Frequenz erregt wird, steht die Spannungsamplitude der Ausgangswicklung in einem sinus- oder cosinusförmigen Verhältnis zum Rotorwinkel oder unterhält ein bestimmtes proportionales Verhältnis oder hat ein lineares Verhältnis zum Rotorwinkel innerhalb eines bestimmten Bereichs.
2. Die Verteilung des magnetischen Flusses zwischen dem Stator und dem Rotor des Drehtransformators folgt einer Sinusregel.
Wenn also die Erregerspannung an die Statorwicklung angelegt wird, erzeugt die Rotorwicklung durch elektromagnetische Kopplung eine induzierte elektromotorische Kraft, wie in der obigen Abbildung dargestellt.
Die Höhe der Ausgangsspannung hängt von der Winkelstellung des Rotors ab und variiert daher sinusförmig mit der Auslenkung des Rotors.
Nach dem Transformatorprinzip ist k = N1 / N2 das Windungsverhältnis, wenn die Anzahl der Windungen in der Primärwicklung N1 und die Anzahl der Windungen in der Sekundärwicklung N2 ist. Wenn eine Wechselspannung an die Primärwicklung angelegt wird
Anwendung des Drehtransformators
1. Phasendetektionsmodus
Der Phasenwinkel der induzierten Spannung ist gleich dem mechanischen Drehwinkel des Rotors.
Solange also der Phasenwinkel der Ausgangsspannung des Rotors erfasst wird, ist der Rotordrehwinkel bekannt.
2. Modus "Amplitudenerkennung
In praktischen Anwendungen kann durch kontinuierliche Änderung des elektrischen Winkels der Modulationsspannung die Veränderung des mechanischen Winkels verfolgt und die Amplitude der induzierten Spannung gemessen werden, um die mechanische Winkelverschiebung zu ermitteln.
5. Vorsichtsmaßnahmen für die Installation von Drehgebern
Mechanische Aspekte:
1. Achten Sie beim Einbau auf die zulässige Wellenbelastung;
2. Vergewissern Sie sich, dass die Achsendifferenz zwischen der Geberwelle und dem Benutzer Ausgangswelle ist kleiner als 0,20 mm, und der Abweichungswinkel von der Achse ist kleiner als 1,5°;
3. Vermeiden Sie bei der Installation Schläge, Stürze und Kollisionen, um Schäden an der Welle und der Scheibe zu vermeiden;
4. Prüfen Sie bei längerem Gebrauch regelmäßig (einmal pro Quartal), ob die Befestigungsschrauben des Gebers locker sind.
Elektrische Aspekte:
1)Der Erdungsdraht sollte so dick wie möglich sein, im Allgemeinen größer als 1,5 Quadratmillimeter;
2)Die Ausgangsdrähte des Encoders sollten sich nicht überschneiden, um Schäden am Ausgangskreis zu vermeiden;
3)Die Signaldrähte des Encoders sollten nicht mit Gleich- oder Wechselstrom verbunden werden, um eine Beschädigung des Ausgangskreises zu vermeiden;
4)Die an den Encoder angeschlossenen Geräte, wie z. B. Motoren, sollten gut geerdet und frei von statischer Elektrizität sein.
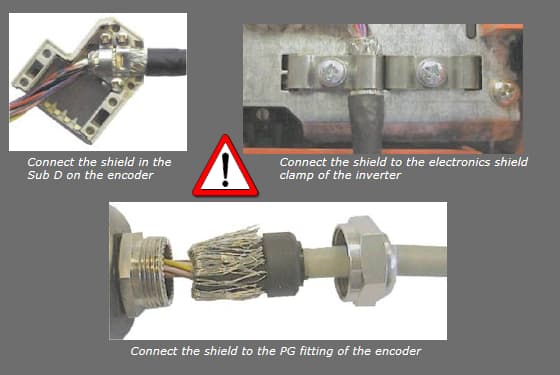
6. Installation des Abschirmkabels für den Encoder.
Als Gründer von MachineMFG habe ich mehr als ein Jahrzehnt meiner Karriere der metallverarbeitenden Industrie gewidmet. Meine umfangreiche Erfahrung hat es mir ermöglicht, ein Experte auf den Gebieten der Blechverarbeitung, der maschinellen Bearbeitung, des Maschinenbaus und der Werkzeugmaschinen für Metalle zu werden. Ich denke, lese und schreibe ständig über diese Themen und bin stets bestrebt, in meinem Bereich an vorderster Front zu bleiben. Lassen Sie mein Wissen und meine Erfahrung zu einem Gewinn für Ihr Unternehmen werden.
Stellen Sie sich vor, Sie könnten die Präzision von Werkzeugmaschinen mit einer einfachen Glasoberfläche erreichen. Lineare Gittermaßstäbe tun genau das, indem sie feine Linien in hochgenaue Messungen umwandeln. In diesem Artikel wird untersucht, wie diese...
Haben Sie sich jemals gefragt, wie scharfe Kanten an Metallteilen geglättet werden? Durch dieses Verfahren, das als Fasen bezeichnet wird, werden gefährliche, gezackte Ecken in sichere, gewinkelte Oberflächen verwandelt. In diesem Artikel erfährst du,...
Haben Sie sich jemals gefragt, welche Lagermarken die besten der Welt sind? In diesem Blogbeitrag stellen wir Ihnen die Top-Lagerhersteller vor, die für ihre außergewöhnliche Qualität, Innovation und...
Haben Sie sich jemals gefragt, wer die Welt hinter den Kulissen mit Strom versorgt? In diesem Blogbeitrag werden wir einen tiefen Einblick in die wichtigsten Generatorhersteller geben, die die Lichter am Leuchten halten...
Sind Sie ein angehender Maschinenbauingenieur, der sich in seinem Fachgebiet profilieren möchte? In diesem Blogbeitrag stellen wir Ihnen die 10 wichtigsten Konstruktionsprogramme für den Maschinenbau vor, mit denen Sie Ihre...
Haben Sie sich schon einmal gefragt, wie die Unversehrtheit von geschweißten Muttern und Schrauben in Ihrem Auto sichergestellt wird? Dieser Artikel enthüllt den akribischen Prozess der Qualitätsprüfungen und Inspektionen, die Ihr Fahrzeug...
Haben Sie sich jemals gefragt, wie ein Elektromotor reibungslos läuft, ohne zu überhitzen? Die Kenntnis der sicheren Betriebstemperaturen für Motoren ist entscheidend für deren Langlebigkeit und Leistung. In diesem Artikel,...
Haben Sie sich schon einmal Gedanken über die faszinierende Welt des Gießens gemacht? Dieses uralte und sich ständig weiterentwickelnde Herstellungsverfahren prägt unser tägliches Leben auf unzählige Arten. In diesem Blogbeitrag erkunden wir die...
Haben Sie sich jemals gefragt, wie die Zahnräder in Ihrem Auto oder Flugzeug so reibungslos funktionieren? Dieser Artikel stellt die wichtigsten Getriebehersteller vor, die die Zukunft des Maschinenbaus gestalten. Sie erfahren...