Erforschung von Motortypen und -prinzipien in der Fertigung
Stellen Sie sich eine Welt ohne das Brummen von Motoren vor - keine Autos, keine Geräte, keine Industriemaschinen. Motoren wandeln elektrische Energie in mechanische Energie um und treiben alles an, vom Spielzeug bis zum Produktionsgiganten. In diesem Artikel befassen wir uns mit verschiedenen Motortypen, ihren Funktionsprinzipien und ihren Anwendungen. Wenn Sie diese Grundlagen verstehen, erhalten Sie Einblicke in die Art und Weise, wie diese unverzichtbaren Geräte unser modernes Leben prägen und welche Innovationen sie in der industriellen Landschaft vorantreiben.
Fast die Hälfte des weltweiten Stromverbrauchs entfällt auf Motoren, was den effizienten Einsatz von Motoren zu einer der wirksamsten Maßnahmen zur Lösung globaler Energieprobleme macht.
Ein Motor ist ein Gerät, das elektrische Energie in mechanische Energie umwandelt. Er nutzt eine stromführende Spule (die Statorwicklung), um ein rotierendes Magnetfeld zu erzeugen, das auf den Rotor (z. B. einen geschlossenen Käfig aus Aluminium) einwirkt, um ein rotierendes magnetisches Drehmoment zu erzeugen.
Motoren werden je nach Art der Stromversorgung in Gleichstrommotoren (DC) und Wechselstrommotoren (AC) unterteilt. Die meisten Motoren im Stromnetz sind Wechselstrommotoren, die entweder synchron oder asynchron sein können (die Drehgeschwindigkeit des Statormagnetfelds des Motors ist nicht mit der Rotordrehzahl synchronisiert).
Ein Motor besteht hauptsächlich aus einem Stator und einem Rotor. Die Bewegungsrichtung des stromdurchflossenen Leiters im Magnetfeld hängt von der Richtung des Stroms und der Richtung der Magnetfeldlinien ab. Das Arbeitsprinzip eines Motors ist die Kraft des Magnetfelds auf den Strom, die den Motor in Drehung versetzt.
Die Motorsteuerung bezieht sich auf die Steuerung des Starts, der Beschleunigung, des Betriebs, der Verzögerung und des Stopps des Motors. Je nach Motortyp und den Umständen, unter denen der Motor eingesetzt wird, gibt es unterschiedliche Anforderungen und Ziele. Bei Motoren werden durch die Motorsteuerung die Ziele Schnellstart, schnelle Reaktion, hoher Wirkungsgrad, hohe Drehmomentabgabe und hohe Überlastfähigkeit erreicht.
Die hier erwähnten Standardmotoren, Servomotoren, Schrittmotoren und Servomotoren beziehen sich auf Gleichstrom-Mikromotoren, die uns häufig begegnen. Ein Motor, auch als "Motor" bezeichnet, ist ein elektromagnetisches Induktionsgerät, das die Umwandlung oder Übertragung elektromagnetischer Energie gemäß dem Faradayschen Gesetz der elektromagnetischen Induktion aufrechterhält.
Ein Motor, auch als "elektrische Maschine" bezeichnet, wird im Stromkreislauf durch den englischen Buchstaben "M" (früher "D") dargestellt. Seine Hauptfunktion ist die Erzeugung eines Antriebsmoments als Stromquelle für elektrische Geräte oder verschiedene Maschinen. Ein Generator wird in der Schaltung mit dem Buchstaben "G" dargestellt.
1. Arten von Motoren
Als Motoren werden im Allgemeinen Geräte bezeichnet, die die durch den elektrischen Stromfluss in einem Magnetfeld erzeugte Kraft in eine Drehbewegung und im weiteren Sinne auch in eine lineare Bewegung umsetzen.
Motoren lassen sich je nach ihrer Energiequelle in zwei Kategorien einteilen: Gleichstrommotoren und Wechselstrommotoren.
Sie können auch grob nach ihrem Drehprinzip eingeteilt werden, mit einigen Ausnahmen für spezielle Motorentypen.
(1) Gleichstrommotor
Bürstenmotor
Der weit verbreitete Bürstenmotor wird allgemein als Gleichstrommotor bezeichnet. Der Rotor dreht sich, indem der Strom durch Elektroden, die "Bürsten" genannt werden (auf der Statorseite), und einen "Kommutator" (auf der Ankerseite) geschaltet wird.
Bürstenloser DC-Motor
Dieser Motor benötigt keine Bürsten oder einen Kommutator, sondern nutzt Schaltfunktionen wie Transistoren, um Ströme zu schalten und den Motor zu drehen.
Schrittmotor
Dieser Motor arbeitet synchron mit Impulsleistung und wird daher auch als Impulsmotor bezeichnet. Er zeichnet sich durch eine einfache und genaue Positionierung aus.
(2) AC-Motor
Asynchroner Motor
Der Wechselstrom bewirkt, dass der Stator ein rotierendes Magnetfeld erzeugt, das den Rotor veranlasst, einen induzierten Strom zu erzeugen und sich unter dessen Einwirkung zu drehen.
Synchroner Motor
Der Wechselstrom erzeugt ein rotierendes Magnetfeld, und der Rotor mit dem Magnetfeld dreht sich aufgrund der Anziehung. Die Drehrate ist mit der Netzfrequenz synchronisiert.
Über elektrischen Strom, magnetische Felder und Kraft
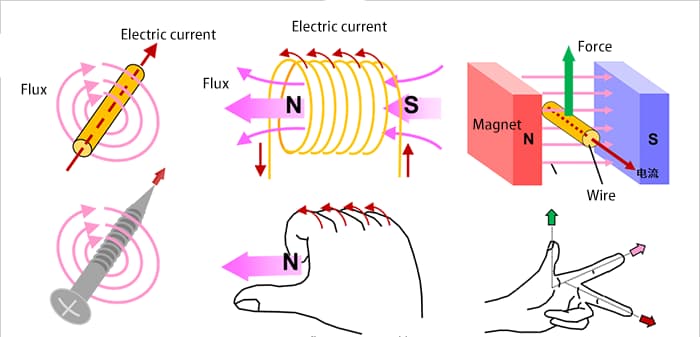
Um die Erklärung der Motorprinzipien zu erleichtern, sollten wir zunächst die grundlegenden Gesetze des elektrischen Stroms, der Magnetfelder und der Kraft wiederholen. Auch wenn es ein Gefühl der Nostalgie hervorruft, kann man dieses Wissen leicht vergessen, wenn man nicht häufig mit magnetischen Bauteilen arbeitet.
Wir werden Bilder und Formeln verwenden, um dies zu veranschaulichen.
Schematische Darstellung der Motordrehung
Wenn die Drahtschleife ein Rechteck ist, müssen wir die Kraft berücksichtigen, die auf den Strom wirkt.
Die Kraft F, die auf die Seiten a und c wirkt, lässt sich nach folgender Formel berechnen:
Dadurch entsteht ein Drehmoment um die Mittelachse.
Betrachtet man zum Beispiel den Zustand, in dem der Drehwinkel nur θ beträgt, so ist die Kraft, die auf b und d im rechten Winkel wirkt, sinθ. Daher kann das Drehmoment Ta auf der Seite a durch die folgende Formel ausgedrückt werden:
In gleicher Weise verdoppelt sich das Drehmoment unter Berücksichtigung der Seite c und erzeugt ein Drehmoment, das nach folgender Formel berechnet wird:
Da die Fläche des Rechtecks S = h x l ist, ergibt sich durch Einsetzen in die obige Formel folgendes Ergebnis:
Diese Formel gilt nicht nur für Rechtecke, sondern auch für andere gängige Formen wie Kreise. Motoren machen sich dieses Prinzip zunutze.
Standard-Motor
Ein Standardmotor, der häufig in Alltagsgegenständen wie elektrischem Spielzeug und Elektrorasierern zu finden ist, ist in der Regel ein Gleichstrom-Bürstenmotor. Er zeichnet sich durch eine hohe Geschwindigkeit und ein geringes Drehmoment aus und benötigt zum Betrieb nur zwei Pole. Wenn er an den Plus- und Minuspol einer Batterie angeschlossen wird, beginnt sich der Motor zu drehen. Wird die Verbindung umgekehrt, dreht sich der Motor in die entgegengesetzte Richtung.
Untersetzungsgetriebe Motor
Ein Getriebemotor ist ein Standardmotor, der mit einem Getriebe ausgestattet ist. Durch diese Konstruktion wird die Drehzahl gesenkt und gleichzeitig das Drehmoment erhöht, wodurch sich der Anwendungsbereich des Standardmotors erweitert.
Servomotor
Ein Servomotor besteht hauptsächlich aus einem Gehäuse, einer Leiterplatte, einem kernlosen Motor, einem Getriebe und einem Positionsgeber. Er arbeitet, indem er ein Signal vom Empfänger an den Servomotor empfängt. Der IC auf der Platine bestimmt die Drehrichtung und treibt den kernlosen Motor an, damit er sich dreht.
Die Bewegung wird über das Untersetzungsgetriebe auf den Schwenkarm übertragen, und der Positionsdetektor sendet gleichzeitig Signale zurück, um zu überprüfen, ob die gewünschte Position erreicht wurde. Der Positionsdetektor ist im Wesentlichen ein variabler Widerstand, der seine Widerstandswerte ändert, wenn sich der Servomotor dreht. Durch die Erfassung dieser Widerstandswerte kann der Drehwinkel bestimmt werden.
Spezifikationen bereitgestellt von Hersteller von Servomotoren umfassen in der Regel Abmessungen (mm), Drehmoment (kg/cm), Geschwindigkeit (sec/60°), Prüfspannung (V) und Gewicht (g). Die Einheit des Drehmoments ist kg/cm und gibt an, wie viel Kilogramm bei einer Schwingenlänge von 1 cm gehoben werden können.
Dies ist das Konzept eines Hebelarms. Je länger der Arm ist, desto geringer ist das Drehmoment. Die Einheit der Geschwindigkeit ist sec/60°, was der Zeit entspricht, die der Servomotor für eine Drehung von 60° benötigt.
Schrittmotor
Ein Schrittmotor ist ein Steuerelement mit offenem Regelkreis, das elektrische Impulssignale in eine Winkel- oder Linearverschiebung umwandelt. Unter nicht überlasteten Bedingungen hängen die Geschwindigkeit und die Halteposition des Motors ausschließlich von der Frequenz und der Anzahl der Impulssignale ab, unabhängig von Laständerungen.
Wenn ein Schrittschalttreiber ein Impulssignal empfängt, treibt er den Schrittmotor an, um einen festen Winkel, den so genannten "Schrittwinkel", in eine vorgegebene Richtung zu drehen. Die Drehung schreitet in festen Winkelschritten voran. Die Anzahl der Impulse kann gesteuert werden, um die Winkelverschiebung zu verwalten und eine präzise Positionierung zu erreichen. Ebenso kann die Impulsfrequenz verwendet werden, um die Drehgeschwindigkeit und die Beschleunigung des Motors zu steuern und so eine Geschwindigkeitsregelung zu erreichen.
Ein Servomotor, auch Stellmotor genannt, dient als ausführende Einheit in automatischen Steuerungssystemen und wandelt die empfangenen elektrischen Signale in eine Winkelverschiebung oder Winkelgeschwindigkeit an der Motorwelle um.
Es gibt zwei Hauptkategorien: Gleichstrom- (DC) und Wechselstrom- (AC) Servomotoren. Das Hauptmerkmal dieser Motoren ist, dass es bei einer Signalspannung von Null kein Phänomen der Selbstrotation gibt und die Drehzahl mit zunehmendem Drehmoment gleichmäßig abnimmt.
Servomotoren arbeiten hauptsächlich mit Impulsen zur Positionierung. Im Wesentlichen dreht sich der Servomotor bei jedem empfangenen Impuls um einen dem Impuls entsprechenden Winkel und erreicht so eine Verschiebung. Da der Servomotor selbst in der Lage ist, Impulse zu senden, sendet er für jedes Grad seiner Drehung eine entsprechende Anzahl von Impulsen aus.
Dies bildet mit den empfangenen Impulsen ein reaktionsfähiges System oder einen "geschlossenen Regelkreis". Auf diese Weise weiß das System, wie viele Impulse an den Servomotor gesendet und wie viele Impulse zurückempfangen wurden. Folglich kann es die Drehung des Motors sehr präzise steuern, was eine genaue Positionierung bis auf 0,001 mm ermöglicht.
Servomotoren werden grob in die Kategorien AC-Servo und DC-Servo unterteilt.
AC-Servomotoren werden weiter unterteilt in asynchrone AC-Servomotoren und synchrone AC-Servomotoren.
DC-Servomotoren werden in bürstenbehaftete und bürstenlose Motoren unterteilt. Bürstenmotoren sind kostengünstig, einfach aufgebaut, erzeugen ein hohes Anlaufdrehmoment, haben einen großen Drehzahlregelbereich und sind leicht zu steuern. Sie sind wartungsbedürftig, aber umständlich (z. B. Austausch der Bürsten), erzeugen elektromagnetische Störungen und stellen besondere Umweltanforderungen. Daher eignen sie sich für kostenempfindliche allgemeine industrielle und zivile Anwendungen.
2. Wie drehen sich die Motoren?
1)Motoren drehen sich mit Hilfe von Magneten und magnetischer Kraft
Um einen Permanentmagneten mit einer rotierenden Welle,
① Drehen des Magneten (zur Erzeugung eines rotierenden Magnetfeldes),
② Nach dem Prinzip der gegensätzlichen Pole ziehen sich an und gleiche Pole stoßen sich ab zwischen dem N-Pol und dem S-Pol,
③ Der Magnet mit der rotierenden Welle wird sich drehen.
Dies ist das Grundprinzip der Motordrehung.
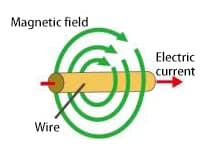
Der Stromfluss durch einen Draht erzeugt ein rotierendes Magnetfeld (Magnetkraft), das den Magneten in Drehung versetzt.
Tatsächlich handelt es sich um denselben Betriebszustand wie zuvor beschrieben.
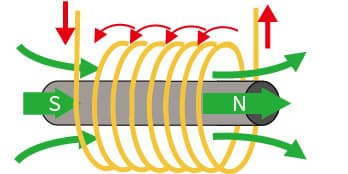
Wenn der Draht zu einer Spule gewickelt wird, verbinden sich die magnetischen Kräfte zu einem großen magnetischen Feldfluss (magnetischer Fluss), der N- und S-Pole erzeugt.
Das Einsetzen eines Eisenkerns in den spulenförmigen Draht erleichtert den Durchgang der Magnetfeldlinien und erzeugt eine stärkere Magnetkraft.
2)Praktische rotierende Motoren
Hier stellen wir die praktische Methode vor, mit Drehstrom und Spulen ein rotierendes Magnetfeld als Drehmotor zu erzeugen.
(Dreiphasenwechselstrom ist ein Wechselstromsignal mit einer Phasendifferenz von 120°.)
Das kombinierte Magnetfeld im obigen Zustand ① entspricht der Abbildung ① unten.
Das kombinierte Magnetfeld im obigen Zustand ② entspricht der Abbildung ② unten.
Das kombinierte Magnetfeld im obigen Zustand ③ entspricht der nachstehenden Abbildung ③.
Wie bereits erwähnt, ist die um den Eisenkern gewickelte Spule in drei Phasen unterteilt, wobei die U-Phasen-Spule, die V-Phasen-Spule und die W-Phasen-Spule im Abstand von 120° angeordnet sind.
Die Spule mit hoher Spannung erzeugt einen N-Pol, während die Spule mit niedriger Spannung einen S-Pol erzeugt.
Jede Phase ändert sich entsprechend einer Sinuswelle, so dass sich die Polarität (N-Pol, S-Pol) und das Magnetfeld (Magnetkraft) jeder Spule ändern.
Zu diesem Zeitpunkt wechselt die Spule, die einen N-Pol erzeugt, nacheinander von einer U-Phasen-Spule zu einer V-Phasen-Spule zu einer W-Phasen-Spule zu einer U-Phasen-Spule und verursacht so eine Drehung.
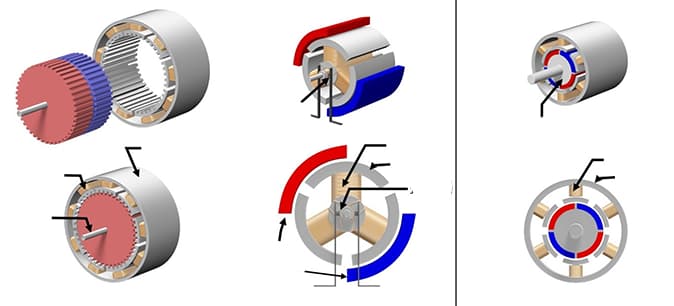
3. Aufbau von Kleinmotoren
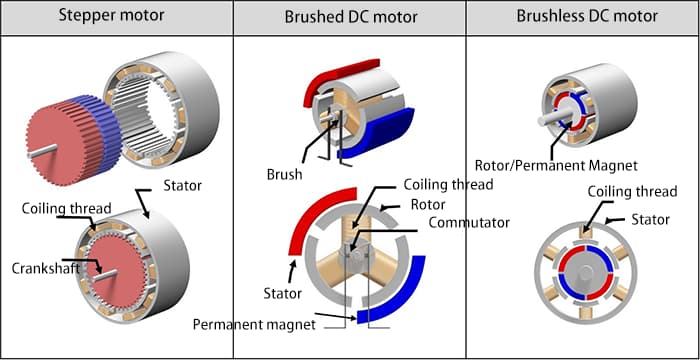
Die folgende Abbildung zeigt die ungefähre Struktur und den Vergleich dreier Motortypen: den Schrittmotor, den bürstenbehafteten Gleichstrommotor und den bürstenlosen Gleichstrommotor.
Die grundlegenden Komponenten dieser Motoren sind hauptsächlich Spulen, Magnete und Rotoren, und sie werden aufgrund ihrer unterschiedlichen Typen in spulenfeste und magnetfeste Typen unterteilt.
Im Folgenden wird die Struktur des Beispieldiagramms erläutert. Da es weitere Strukturen geben kann, wenn wir sie feiner unterteilen, bitten wir um Verständnis, dass dieser Artikel die Gesamtstruktur beschreibt.
Bei dem hier gezeigten Schrittmotor ist die Spule auf der Außenseite befestigt und der Magnet dreht sich auf der Innenseite.
Bei dem hier gezeigten bürstenbehafteten Gleichstrommotor ist der Magnet auf der Außenseite befestigt und die Spule dreht sich auf der Innenseite. Die Bürsten und der Kommutator sind für die Stromversorgung der Spule und die Änderung der Stromrichtung verantwortlich.
Bei dem hier gezeigten bürstenlosen Motor ist die Spule auf der Außenseite befestigt und der Magnet dreht sich auf der Innenseite.
Aufgrund der verschiedenen Motortypen kann der Aufbau trotz gleicher Grundkomponenten unterschiedlich sein. Eine ausführliche Erklärung wird in jedem Abschnitt gegeben.
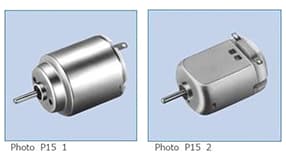
4. Bürstenmotor
Aufbau eines Bürstenmotors
Nachfolgend sehen Sie das Aussehen eines häufig in Modellen verwendeten bürstenbehafteten Gleichstrommotors sowie eine Explosionszeichnung eines typischen zweipoligen (2 Magnete) und dreischlitzigen (3 Spulen) Motors. Viele Leute haben vielleicht Erfahrung mit dem Zerlegen von Motoren und dem Entfernen von Magneten.
Wie man sieht, ist der Permanentmagnet eines bürstenbehafteten Gleichstrommotors feststehend, und die Spulen können sich um den inneren Mittelpunkt des Motors drehen. Die feste Seite wird als "Stator" bezeichnet, während die rotierende Seite als "Rotor" bezeichnet wird.
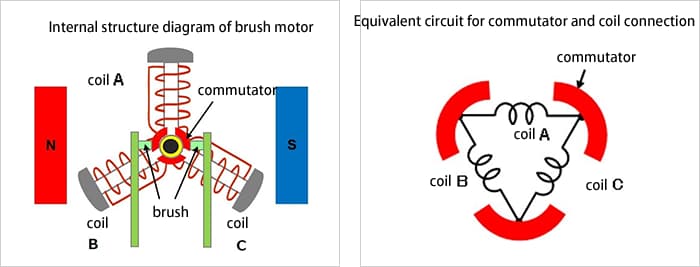
Nachfolgend finden Sie eine schematische Darstellung des Aufbaus des Motors.
Auf dem Umfang der rotierenden Mittelachse befinden sich drei Kommutatoren (gebogene Metallplatten zum Schalten des Stroms). Um zu verhindern, dass sie sich gegenseitig berühren, sind die Kommutatoren in Abständen von 120 Grad (360 Grad ÷ 3) angeordnet. Die Kommutatoren drehen sich mit der Drehung der Achse.
Jeder Kommutator ist mit einem Ende der Spule und einem anderen Ende der Spule verbunden, und die drei Kommutatoren und drei Spulen bilden zusammen ein (ringförmiges) Schaltnetz.
Zwei Bürsten sind in einem Winkel von 0° und 180° angebracht, um die Kommutatoren zu kontaktieren. Die externe Gleichstromversorgung ist mit den Bürsten verbunden, und der Strom fließt auf dem Weg Bürste → Kommutator → Spule → Bürste.
Funktionsprinzip eines Bürstenmotors.
① Drehung gegen den Uhrzeigersinn aus dem Ausgangszustand
Im Ausgangszustand befindet sich die Spule A oben, und die Stromversorgung ist mit den Bürsten verbunden, wobei die linke (+) und die rechte (-) Seite definiert sind. Ein großer Strom fließt von der linken Bürste durch den Kommutator zu Spule A, und die obere (äußere) Seite von Spule A wird zu einer S-Pol-Struktur.
Da die Hälfte des Stroms, der durch die Spule A von der linken Bürste zu den Spulen B und C fließt, in die entgegengesetzte Richtung zu Spule A fließt, wird die Außenseite der Spulen B und C zu einem schwächeren N-Pol (im Diagramm durch kleinere Buchstaben dargestellt).
Die in diesen Spulen erzeugten Magnetfelder sowie die Abstoßung und Anziehung zwischen den Magneten bewirken, dass sich die Spule gegen den Uhrzeigersinn dreht.
② Weitere Drehung gegen den Uhrzeigersinn
Unter der Annahme, dass sich die Spule A um 30 Grad gegen den Uhrzeigersinn dreht, berührt die rechte Bürste zwei Kommutatoren.
Der Strom in Spule A fließt weiterhin von der linken Bürste durch die rechte Bürste, und die Außenseite von Spule A bleibt ein S-Pol.
Der gleiche Strom wie in Spule A fließt durch Spule B, und die Außenseite von Spule B wird zu einem stärkeren N-Pol.
Da die beiden Enden von Spule C durch die Bürsten kurzgeschlossen sind, fließt kein Strom und es wird kein Magnetfeld erzeugt.
Auch in diesem Fall ist die Spule einer Drehkraft entgegen dem Uhrzeigersinn unterworfen.
Von ③ bis ④ wirkt auf die obere Spule weiterhin eine nach links gerichtete Kraft und auf die untere Spule eine nach rechts gerichtete Kraft, so dass sie sich weiterhin gegen den Uhrzeigersinn dreht.
Jedes Mal, wenn sich die Spule um 30 Grad in die Zustände ③ und ④ dreht, wird die Außenseite der Spule zu einem S-Pol, wenn sich die Spule oberhalb der horizontalen Mittelachse befindet, und zu einem N-Pol, wenn sich die Spule unterhalb dieser Achse befindet, wobei diese Bewegung wiederholt wird.
Mit anderen Worten, die obere Spule erhält wiederholt eine Kraft nach links und die untere Spule erhält wiederholt eine Kraft nach rechts (beide gegen den Uhrzeigersinn). Dies führt dazu, dass sich der Rotor kontinuierlich gegen den Uhrzeigersinn dreht.
Wenn die Stromversorgung an die gegenüberliegende linke Bürste (-) und rechte Bürste (+) angeschlossen wird, erzeugt die Spule ein Magnetfeld in der entgegengesetzten Richtung, und die Richtung der auf die Spule ausgeübten Kraft wird umgekehrt, was eine Drehung im Uhrzeigersinn bewirkt.
Außerdem hört der Rotor des Bürstenmotors auf, sich zu drehen, wenn die Stromzufuhr unterbrochen wird, da kein Magnetfeld vorhanden ist, das ihn am Drehen hindert.
5. Dreiphasiger bürstenloser Vollwellenmotor
Erscheinungsbild und Struktur eines dreiphasigen bürstenlosen Vollwellenmotors
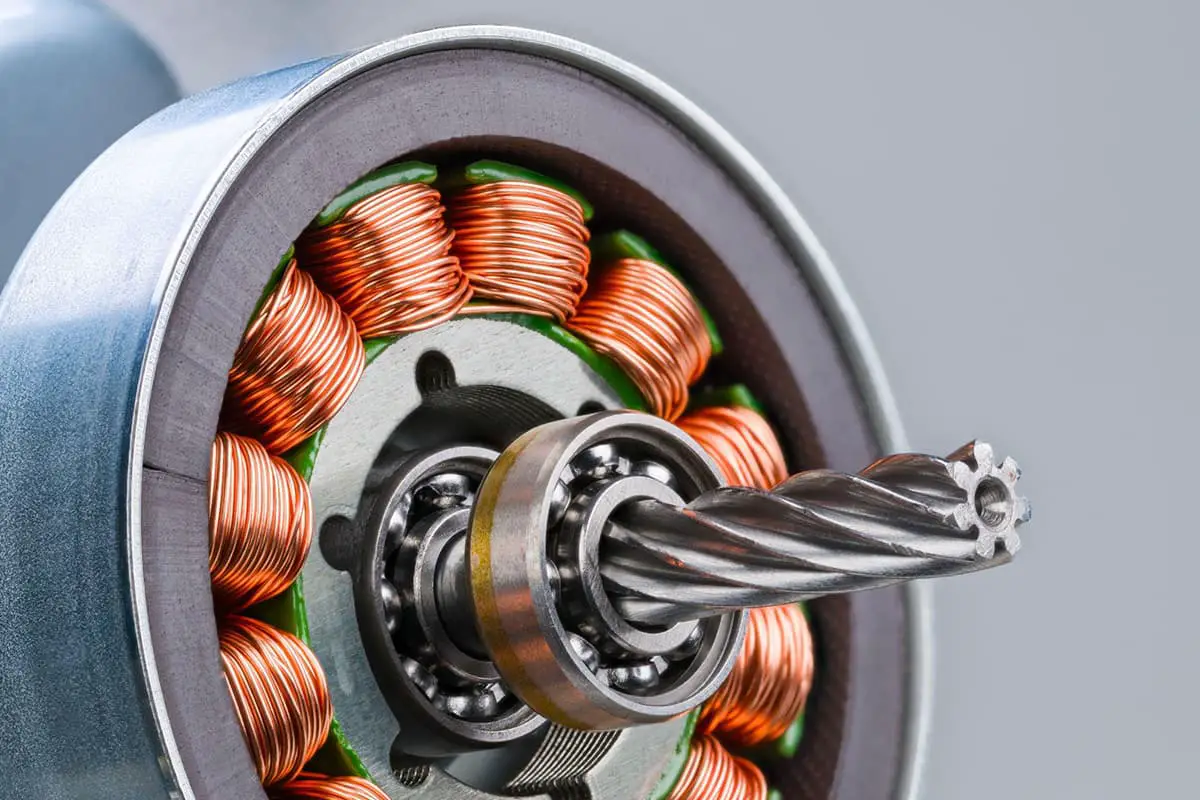
Die folgende Abbildung zeigt ein Beispiel für das Aussehen und den Aufbau eines bürstenlosen Motors.
Links ist ein Beispiel für einen Spindelmotor zum Drehen von Platten in einem Plattenabspielgerät abgebildet. Es gibt insgesamt neun Spulen, die aus drei Phasen mal drei bestehen.
Rechts ist ein Beispiel für einen Spindelmotor für ein FDD-Gerät zu sehen, der 12 Spulen (drei mal vier Phasen) hat. Die Spulen sind auf der Leiterplatte befestigt und um einen Eisenkern gewickelt.
Das scheibenförmige Bauteil rechts neben der Spule ist ein Permanentmagnetrotor. Der äußere Rand besteht aus einem Dauermagneten, und die Rotorwelle ist in die Mitte der Spule eingesetzt und bedeckt einen Teil davon. Der Dauermagnet rotiert um den äußeren Rand der Spule.
Das interne Strukturdiagramm eines dreiphasigen bürstenlosen Vollwellenmotors und das Ersatzschaltbild für die Spulenanschlüsse.
Es folgen vereinfachte Darstellungen des inneren Aufbaus und der Ersatzschaltung für Spulenanschlüsse.
Das vereinfachte Diagramm zeigt einen 2-poligen (2 Magnete) 3-Nut-Motor (3 Spulen) mit einer einfachen Struktur. Er ist ähnlich wie ein Bürstenmotor Motoraufbau mit der gleichen Anzahl von Polen und Schlitzen, aber die Spulenseite ist fest, während die Magnete rotieren können. Natürlich gibt es keine Bürsten.
In diesem Fall sind die Spulen in einer Y-förmigen Konfiguration verbunden, und es werden Halbleiterbauelemente verwendet, um die Spulen mit Strom zu versorgen. Der Stromfluss wird in Abhängigkeit von der Position der rotierenden Magneten gesteuert.
In diesem Beispiel werden Hall-Elemente verwendet, um die Position der Magnete zu ermitteln. Die Hall-Elemente befinden sich zwischen den Spulen und erfassen die durch die Magnetfeldstärke erzeugte Spannung, die als Positionsinformation verwendet wird. Auf dem Bild des Spindelmotors für das FDD-Gerät, das weiter oben gezeigt wurde, sind ebenfalls Hall-Elemente zwischen den Spulen zur Positionserfassung zu sehen (oberhalb der Spulen).
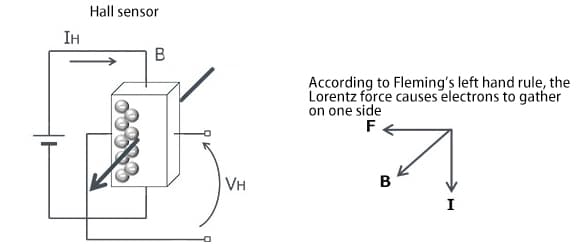
Hall-Elemente sind bekannte magnetische Sensoren, die die Größe des Magnetfeldes in die Größe der Spannung umwandeln und die Richtung des Magnetfeldes mit einer positiven oder negativen Spannung darstellen.
Das folgende Diagramm veranschaulicht den Hall-Effekt.
Das Hall-Element macht sich das Phänomen zunutze, dass "wenn ein Strom IH durch einen Halbleiter fließt und ein magnetischer Fluss B senkrecht zum Strom durchfließt, eine Spannung VH in der Richtung senkrecht zum Strom und zum Magnetfeld erzeugt wird." Der amerikanische Physiker Edwin Herbert Hall entdeckte dieses Phänomen und nannte es den "Hall-Effekt". Die erzeugte Spannung VH wird durch die folgende Formel ausgedrückt:
VH = (KH / d)・IH・B
※KH: Hall-Koeffizient, d: Dicke der Oberfläche, in die der magnetische Fluss eindringt
Wie in der Formel dargestellt, ist die Spannung umso höher, je höher der Strom ist. Diese Eigenschaft wird üblicherweise verwendet, um die Position des Rotors (Magneten) zu erkennen.
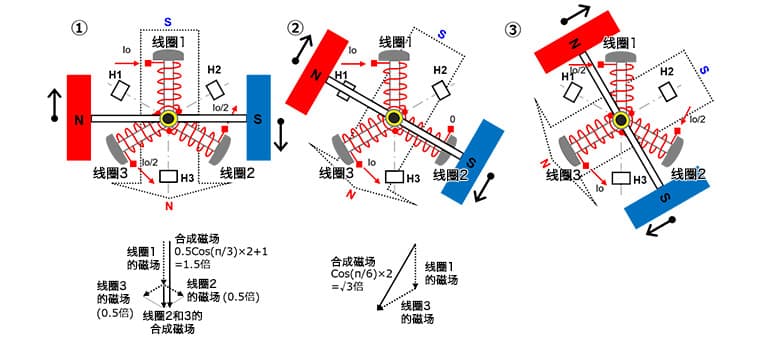
Das Rotationsprinzip eines bürstenlosen Motors wird nun in den Schritten 1 bis 6 erläutert. Zum besseren Verständnis wurde der Permanentmagnet von einer kreisförmigen zu einer rechteckigen Form vereinfacht.
① In einem dreiphasigen Spulensystem ist die Spule 1 in der 12-Uhr-Position, die Spule 2 in der 4-Uhr-Position und die Spule 3 in der 8-Uhr-Position auf dem Ziffernblatt fixiert. Ein 2-poliger Dauermagnet mit dem N-Pol auf der linken und dem S-Pol auf der rechten Seite ist in der Lage, sich zu drehen.
Lasse einen Strom Io durch die Spule 1 fließen, um ein Magnetfeld mit dem S-Pol an der Außenseite der Spule zu erzeugen. Lasse einen Strom von Io/2 durch die Spulen 2 und 3 fließen, um ein N-poliges Magnetfeld an der Außenseite der Spule zu erzeugen.
Wenn die Magnetfelder der Spulen 2 und 3 vektoriell kombiniert werden, entsteht ein nach unten gerichtetes N-poliges Magnetfeld. Dieses Magnetfeld ist 0,5 mal so groß wie das Magnetfeld, das durch den Strom Io in einer einzelnen Spule erzeugt wird, und wenn es zum Magnetfeld von Spule 1 addiert wird, wird es 1,5 mal stärker. Dadurch entsteht ein kombiniertes Magnetfeld senkrecht zum Dauermagneten, das ein maximales Drehmoment erzeugt und den Dauermagneten dazu bringt, sich im Uhrzeigersinn zu drehen.
Wenn der Strom durch die Spule 2 verringert und der Strom durch die Spule 3 je nach Drehposition erhöht wird, dreht sich das kombinierte Magnetfeld ebenfalls im Uhrzeigersinn, so dass sich der Permanentmagnet weiterdreht.
② In einem um 30 Grad gedrehten Zustand fließt ein Strom Io durch die Spule 1, wodurch der Strom in der Spule 2 zu Null wird und der Strom Io aus der Spule 3 fließt.
Die Außenseite von Spule 1 wird zu einem S-Pol und die Außenseite von Spule 3 wird zu einem N-Pol. Bei vektorieller Kombination ist das erzeugte Magnetfeld √3 (≈1,72) mal stärker als das Magnetfeld, das durch den Strom Io in einer einzelnen Spule erzeugt wird. Dadurch entsteht auch ein kombiniertes Magnetfeld senkrecht zum Dauermagneten, der sich im Uhrzeigersinn dreht.
Wenn sich die Drehposition ändert, verringert sich der in Spule 1 fließende Strom, der in Spule 2 fließende Strom beginnt bei Null und nimmt zu, und der aus Spule 3 fließende Strom steigt auf Io. Infolgedessen dreht sich auch das kombinierte Magnetfeld im Uhrzeigersinn, so dass sich der Dauermagnet weiterdreht.
Unter der Annahme, dass jeder Phasenstrom eine Sinuswelle ist, beträgt der Stromwert hier Io × sin(π⁄3) = Io × √3⁄2. Durch die vektorielle Kombination der Magnetfelder beträgt die Gesamtmagnetfeldstärke das 1,5-fache des von einer einzelnen Spule erzeugten Magnetfelds.
Wenn jeder Phasenstrom eine Sinuswelle ist, beträgt die Größe des vektoriell kombinierten Magnetfelds unabhängig von der Position des Dauermagneten immer das 1,5-fache des von einer einzelnen Spule erzeugten Magnetfelds, und das Magnetfeld steht senkrecht zum Magnetfeld des Dauermagneten in einem 90-Grad-Winkel.
③ Bei einer fortgesetzten Drehung um 30 Grad fließt ein Strom von Io/2 durch Spule 1, ein Strom von Io/2 durch Spule 2 und ein Strom von Io aus Spule 3.
Die Außenseite von Spule 1 wird zu einem S-Pol, die Außenseite von Spule 2 wird ebenfalls zu einem S-Pol, und die Außenseite von Spule 3 wird zu einem N-Pol. Bei vektorieller Kombination ist das erzeugte Magnetfeld 1,5 mal so groß wie das Magnetfeld, das entsteht, wenn ein Strom von Io durch eine einzelne Spule fließt (wie in Schritt 1). Dadurch entsteht auch ein kombiniertes Magnetfeld, das senkrecht zum Magnetfeld des Dauermagneten in einem Winkel von 90 Grad steht und sich im Uhrzeigersinn dreht.
④-⑥
Fahren Sie mit dem Drehen in der gleichen Weise wie in den Schritten 1-3 fort.
Wenn also der in die Spulen fließende Strom in Abhängigkeit von der Position des Dauermagneten kontinuierlich umgeschaltet wird, dreht sich der Dauermagnet in einer festen Richtung. Wenn der Strom in die entgegengesetzte Richtung fließt und die Richtung des kombinierten Magnetfelds umgekehrt wird, dreht er sich gegen den Uhrzeigersinn.
Das folgende Diagramm zeigt den Strom, der durch jede Spule für jeden Schritt von 1 bis 6 fließt.
Durch die obige Erklärung sollte nun der Zusammenhang zwischen Stromänderungen und Rotation verstanden werden.
6. Schrittmotor
Ein Schrittmotor ist ein Motortyp, der durch Synchronisierung mit einem Impulssignal präzise in Bezug auf Drehwinkel und Geschwindigkeit gesteuert werden kann. Schrittmotoren werden auch als "Impulsmotoren" bezeichnet.
Aufgrund ihrer Fähigkeit, eine genaue Positionierung ohne den Einsatz von Positionssensoren und nur mit einer Steuerung zu erreichen, werden Schrittmotoren häufig in Geräten eingesetzt, die eine Positionierung erfordern.
Aufbau eines Schrittmotors (zweiphasig bipolar)
Die folgenden Bilder zeigen von links nach rechts Beispiele für das Aussehen eines Schrittmotors, ein schematisches Diagramm seines inneren Aufbaus und ein konzeptionelles Diagramm seines Aufbaus.
Im Beispiel sind sowohl der HB- (Hybrid) als auch der PM-Typ (Permanentmagnet) von Schrittmotoren dargestellt. Die schematische Darstellung in der Mitte zeigt auch den Aufbau der beiden Typen HB und PM.
Ein Schrittmotor ist so aufgebaut, dass die Spulen feststehen und der Permanentmagnet rotiert. Das konzeptionelle Diagramm der internen Struktur des Schrittmotors auf der rechten Seite ist ein Beispiel für einen PM-Motor mit zweiphasigen (zwei Sätze) Spulen.
Im Beispiel des Grundaufbaus des Schrittmotors sind die Spulen außen und der Permanentmagnet innen angeordnet. Neben dem zweiphasigen Typ gibt es auch Typen mit mehr Phasen, wie z. B. dreiphasig und fünfphasig.
Einige Schrittmotoren haben unterschiedliche Strukturen, aber um das grundlegende Funktionsprinzip von Schrittmotoren zu erläutern, wird in diesem Artikel der Schrittmotor mit der Grundstruktur von festen Spulen und rotierenden Permanentmagneten vorgestellt.
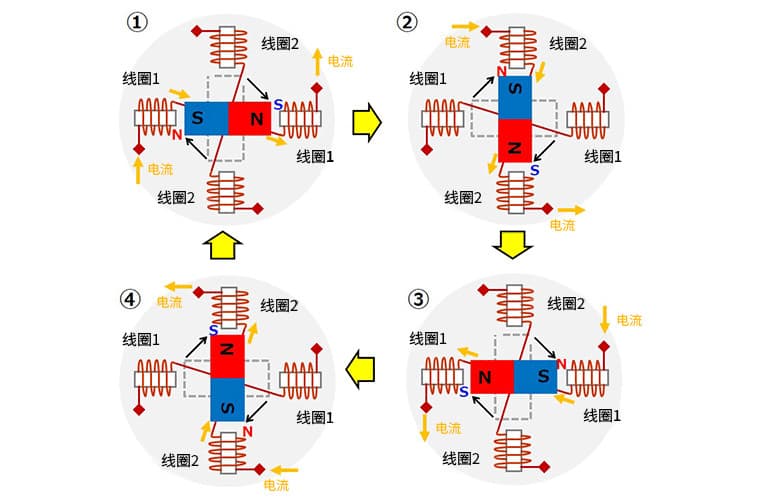
Das folgende Diagramm dient zur Erläuterung des grundlegenden Funktionsprinzips des Schrittmotors. Es handelt sich um ein Beispiel für die Erregung jeder Phase (eines Spulensatzes) der im vorherigen Bild gezeigten zweiphasigen bipolaren Spulen, wobei ein Zustandswechsel von ① zu ④ angenommen wird. Die Spulen bestehen aus den Spulen 1 und 2, und der Strompfeil zeigt die Richtung des Stromflusses an.
①
Elektrischer Strom fließt von der linken Seite der Spule 1 und tritt auf der rechten Seite aus.
Es darf kein elektrischer Strom durch die Spule 2 fließen.
An diesem Punkt wird die Innenseite der linken Spule 1 zu Norden und die Innenseite der rechten Spule 1 zu Süden.
Infolgedessen wird der mittlere Dauermagnet vom Magnetfeld der Spule 1 angezogen und bleibt in einem Zustand stehen, in dem die linke Seite Süden und die rechte Seite Norden ist.
②
Stoppen Sie den Strom in Spule 1 und lassen Sie den Strom oben aus Spule 2 fließen und unten austreten.
Die Innenseite der oberen Spule 2 wird zu Norden und die Innenseite der unteren Spule 2 zu Süden.
Der Dauermagnet wird von seinem Magnetfeld angezogen, dreht sich um 90° im Uhrzeigersinn und bleibt stehen.
③
Stoppen Sie den Strom in Spule 2 und lassen Sie den Strom auf der rechten Seite von Spule 1 fließen und auf der linken Seite austreten.
Die Innenseite der linken Spule 1 wird zu Süden und die Innenseite der rechten Spule 1 zu Norden.
Der Dauermagnet wird von seinem Magnetfeld angezogen, dreht sich um weitere 90° im Uhrzeigersinn und bleibt stehen.
④
Stoppen Sie den Strom in Spule 1 und lassen Sie den Strom unten aus Spule 2 fließen und oben austreten.
Die Innenseite der oberen Spule 2 wird zu Süden und die Innenseite der unteren Spule 2 zu Norden.
Der Dauermagnet wird von seinem Magnetfeld angezogen, dreht sich um weitere 90° im Uhrzeigersinn und bleibt stehen.
Durch Umschalten des durch die Spulen fließenden Stroms in der Reihenfolge der Schritte ① bis ④ mittels elektronischer Schaltungen kann der Schrittmotor gedreht werden. In diesem Beispiel wird der Schrittmotor bei jedem Schaltvorgang um 90° gedreht.
Außerdem kann der Schrittmotor durch den kontinuierlichen Stromfluss durch eine bestimmte Spule seine angehaltene Position beibehalten und ein Haltemoment aufweisen. Es ist erwähnenswert, dass eine Umkehrung der Reihenfolge des durch die Spulen fließenden Stroms den Schrittmotor in die entgegengesetzte Richtung drehen lassen kann.
Als Gründer von MachineMFG habe ich mehr als ein Jahrzehnt meiner Karriere der metallverarbeitenden Industrie gewidmet. Meine umfangreiche Erfahrung hat es mir ermöglicht, ein Experte auf den Gebieten der Blechverarbeitung, der maschinellen Bearbeitung, des Maschinenbaus und der Werkzeugmaschinen für Metalle zu werden. Ich denke, lese und schreibe ständig über diese Themen und bin stets bestrebt, in meinem Bereich an vorderster Front zu bleiben. Lassen Sie mein Wissen und meine Erfahrung zu einem Gewinn für Ihr Unternehmen werden.
Haben Sie sich jemals gefragt, wie ein Elektromotor reibungslos läuft, ohne zu überhitzen? Die Kenntnis der sicheren Betriebstemperaturen für Motoren ist entscheidend für deren Langlebigkeit und Leistung. In diesem Artikel,...
In der schnelllebigen Welt der industriellen Automatisierung sind Servomotoren die unbesungenen Helden, die für Präzision und Effizienz sorgen. Aber woher weiß man bei den zahllosen Herstellern, die um Aufmerksamkeit buhlen, welche...
Haben Sie sich jemals gefragt, wie Bagger und andere schwere Maschinen ihre kraftvollen Aufgaben erfüllen? In diesem Artikel werden wir die faszinierenden Unterschiede zwischen Hydraulikpumpen und -motoren untersuchen. Du erfährst, wie...
Haben Sie sich jemals gefragt, wie Maschinen präzise Bewegungen ausführen können? In diesem Blog tauchen wir in die faszinierende Welt der Servomotor-Steuerungsarten ein. Von der Impuls- bis zur Analogsteuerung erkunden wir, wie jede Methode funktioniert...
Haben Sie sich schon einmal gefragt, wie Züge über Schienen schweben können oder wie Roboter präzise Bewegungen ausführen? Dieser Artikel enthüllt die faszinierende Welt der Linearmotoren und erklärt ihre Prinzipien, Typen und einzigartigen Vorteile....
Haben Sie sich schon einmal gefragt, wie Sie den perfekten Motor für Ihr Projekt finden? Der Schlüssel liegt im Verständnis der verschiedenen Motortypen - Gleichstrom-, Asynchron- und Synchronmotoren - und ihrer einzigartigen Vorteile. Dieser Artikel schlüsselt auf...
Warum werden Motorlager so heiß, und was kann man dagegen tun? Dieser Artikel befasst sich mit den Ursachen für die Wärmeentwicklung von Motorlagern, von übermäßigen Belastungen und...
Was passiert, wenn das magnetische Gleichgewicht eines Motors gestört ist? Einseitige magnetische Anziehungskraft entsteht durch einen unausgeglichenen Luftspalt in Motoren, der ungleiche Kräfte verursacht, die die Motorlager belasten. Dieser Artikel...
Welchen Einfluss haben die Lager auf die Effizienz und Haltbarkeit von Stirnradgetriebemotoren? Dieser Artikel befasst sich mit der kritischen Rolle von Lagern, ihrer Auswahl und Anordnung sowie ihrer Handhabung...