Fall eins
Gegeben:
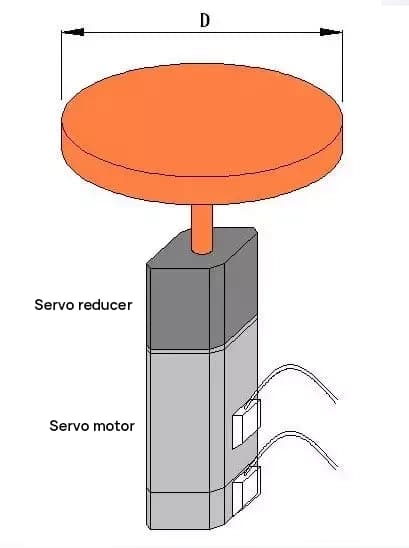
- Masse der Scheibe M=50 kg
- Scheibendurchmesser D=500 mm
- Maximale Scheibendrehzahl 60 U/min
Bitte wählen Sie den Servomotor und das Untersetzungsgetriebe, das Komponentenschema ist wie folgt:
Berechnung des Trägheitsmoments für die Rotation der Scheibe
JL = MD2/8 = 50 * 502 / 8 = 15625 [kg-cm2]
Unter der Annahme eines Untersetzungsverhältnisses von 1:R beträgt die auf die Servomotorwelle wirkende Lastträgheit 15625/R2.
Gemäß dem Grundsatz, dass die Trägheit der Last kleiner sein sollte als das Dreifache der Rotorträgheit JM des Motors,
wenn ein 400W-Motor gewählt wird, JM = 0,277 [kg-cm2],
dann: 15625 / R2 < 3*0.277, R2 > 18803, R > 137,
die Ausgangsdrehzahl = 3000/137 = 22 [U/min],
was der Anforderung nicht entspricht.
Wenn ein 500-W-Motor gewählt wird, muss JM = 8,17 [kg-cm2],
dann: 15625 / R2 < 3*8.17, R2 > 637, R > 25,
die Ausgangsdrehzahl = 2000/25 = 80 [U/min],
was die Anforderung erfüllt.
Diese Art der Übertragung hat einen minimalen Widerstand, so dass Drehmomentberechnungen ignoriert werden.
Fall zwei
Gegeben:
- Gewicht der Last M = 50 kg
- Synchroner Riemen Raddurchmesser D = 120 mm
- Reduktionsverhältnis R1 = 10, R2 = 2
- Reibungskoeffizient zwischen Last und Maschinentisch µ = 0,6
- Maximale Bewegungsgeschwindigkeit der Last: 30 m/min
- Zeit für die Beschleunigung der Last aus dem Ruhezustand auf die Höchstgeschwindigkeit: 200 ms
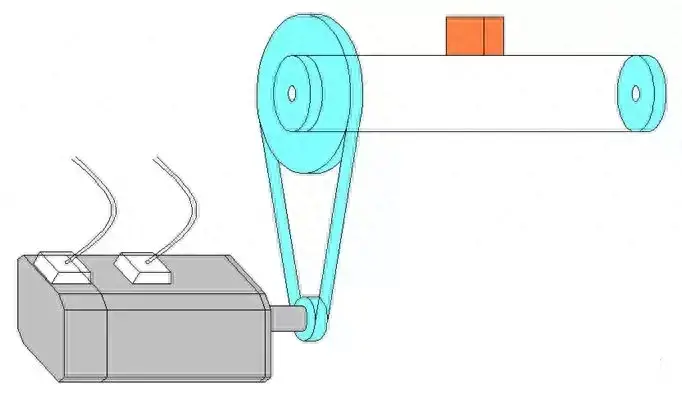
Ohne Berücksichtigung des Gewichts der einzelnen Förderbandräder,
Wie hoch ist die Mindestleistung, die ein Motor zum Antrieb einer solchen Last benötigt?
Die schematische Darstellung des Bauteils sieht wie folgt aus:
1. Berechnung der auf die Motorwelle wirkenden Lastträgheit:
JL = M * D2 / 4 / R12
= 50 * 144 / 4 / 100
= 18 [kg-cm2]
Es gilt der Grundsatz, dass das Trägheitsmoment der Last weniger als das Dreifache des Rotorträgheitsmoments des Motors betragen sollte (JM):
JM > 6 [kg-cm2]
2. Berechnung des für den Antrieb der Motorlast erforderlichen Drehmoments:
Das zur Überwindung der Reibung erforderliche Drehmoment:
Tf = M * g * µ * (D / 2) / R2 / R1
= 50 * 9.8 * 0.6 * 0.06 / 2 / 10
= 0,882 [N-m]
Für die Beschleunigung erforderliches Drehmoment:
Ta = M * a * (D / 2) / R2 / R1
= 50 * (30 / 60 / 0.2) * 0.06 / 2 / 10
= 0,375 [N-m]
Das Nenndrehmoment des Servomotors sollte größer sein als Tfund das maximale Drehmoment sollte größer sein als Tf + Ta.
3. Berechnung der erforderlichen Motordrehzahl:
N = v / (πD) * R1
= 30 / (3.14 * 0.12) * 10
= 796 [U/min]
Fall drei
Gegeben:
- Gewicht der Last M = 200 kg
- Spindelsteigung PB = 20 mm
- Schneckendurchmesser DB = 50 mm
- Schneckengewicht MB = 40 kg
- Reibungskoeffizient µ = 0,2
- Mechanischer Wirkungsgrad η = 0,9
- Geschwindigkeit der Lastbewegung V = 30 m/min
- Gesamtbewegungszeit t = 1,4 s
- Beschleunigungs- und Verzögerungszeit t1 = t3 = 0.2 s
- Ruhezeit t4 = 0.3 s
Bitte wählen Sie den Servomotor mit der Mindestleistung, die den Anforderungen der Last entspricht,
Das Komponentenschema sieht wie folgt aus:
1. Berechnung der auf die Motorwelle umgerechneten Lastträgheit
Lastträgheit des auf die Motorwelle umgerechneten Gewichts
JW = M * (PB / 2π)²
= 200 * (2 / 6.28)²
= 20,29 [kg-cm²]
Die Rotationsträgheit der Schraube
JB = MB * DB² / 8
= 40 * 25 / 8
= 125 [kg-cm²]
Gesamtträgheitsmoment der Last
JL = JW + JB = 145,29 [kg-cm²]
2. Berechnung der Motordrehzahl
Erforderliche Motordrehzahl
N = V / PB
= 30 / 0.02
= 1500 [U/min]
3. Berechnung des für den Antrieb der Motorlast erforderlichen Drehmoments
Das zur Überwindung der Reibung erforderliche Drehmoment
Tf = M * g * µ * PB / 2π / η
= 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9
= 1,387 [N-m]
Erforderliches Drehmoment, wenn das Gewicht beschleunigt wird
TA1 = M * a * PB / 2π / η
= 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9
= 1,769 [N-m]
Erforderliches Drehmoment, wenn die Schraube beschleunigt wird
TA2 = JB * α / η
= JB * (N * 2π / 60 / t1) / η
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9
= 10,903 [N-m]
Für die Beschleunigung erforderliches Gesamtdrehmoment
TA = TA1 + TA2 = 12,672 [N-m]
4. Auswahl des Servomotors
Nenndrehmoment des Servomotors
T > Tf und T > Trms
Maximales Drehmoment des Servomotors
Tmax > Tf + TA
Schließlich wurde der Motor ECMA-E31820ES ausgewählt.