Diseño óptimo del mecanismo de levas: Puntos clave a tener en cuenta
¿Cómo puede un sencillo sistema de leva y seguidor dar lugar a un movimiento eficaz y preciso en maquinaria compleja? Este artículo explora los entresijos del diseño de mecanismos de accionamiento de levas, explicando los distintos tipos de levas y seguidores, sus trayectorias de movimiento y cómo conseguir un rendimiento óptimo. Desde los componentes básicos hasta los métodos de diseño avanzados, los lectores obtendrán información valiosa para crear sistemas de levas de gran eficacia. Espere aprender consejos prácticos y análisis detallados que mejorarán su comprensión y aplicación de los mecanismos de leva en proyectos de ingeniería.
Composición y clasificación de los mecanismos de levas
El mecanismo de levas suele constar de dos piezas móviles, la leva y el seguidor, ambas fijas al bastidor. El dispositivo de leva es muy versátil y puede generar casi cualquier movimiento arbitrario.
Una leva puede definirse como un componente con una superficie curva o una ranura. Al girarlo o rotarlo, otro componente, el seguidor, puede proporcionar un movimiento preestablecido. La trayectoria del seguidor suele limitarse a una ranura para obtener un movimiento alternativo.
Aunque a veces dependen de su propio peso durante la carrera de retorno, algunos mecanismos utilizan muelles como fuerza de retorno para lograr movimientos precisos. Otros utilizan carriles guía para desplazarse por trayectorias específicas.
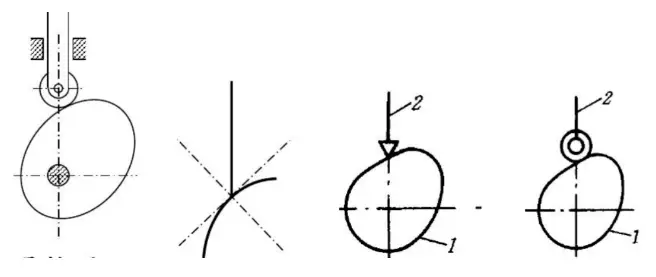
Según la forma de la leva, puede dividirse en tres tipos: leva de disco, leva móvil y leva cilíndrica.
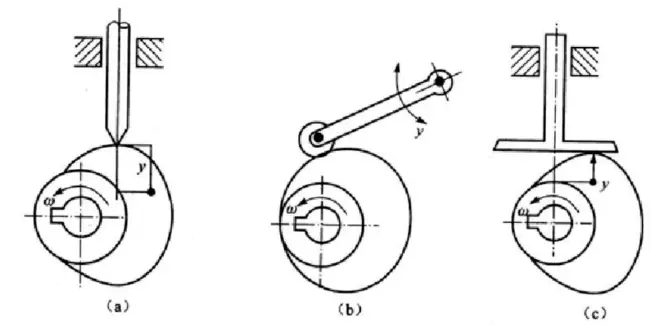
Los seguidores pueden dividirse, según sus extremos, en tres tipos: seguidores puntiagudos, seguidores de rodillo y seguidores de fondo plano.
Tipos de mecanismos de leva (a) Seguidor de punta; (b) Seguidor de rodillo: (c) Seguidor de fondo plano
Debido al contacto puntual entre el seguidor de punta afilada y la leva, que provoca una gran tensión y un rápido desgaste, no es adecuado para mecanismos de leva de baja velocidad con gran impacto. El seguidor de rodillos puede superar estas deficiencias.
Para mejorar la eficacia de la transmisión, también podemos introducir un seguidor de fondo plano que sea perpendicular a la dirección de la fuerza en la superficie inferior.
Los elementos de transmisión que hemos considerado antes tienen forma de movimiento rectilíneo, pero también pueden tener forma de movimiento oscilante. El primero se denomina seguidor de acción directa, y el segundo, seguidor oscilante.
También podemos hacer que el centro de rotación de la leva no esté en la trayectoria lineal del movimiento del seguidor. En este caso, lo llamamos descentrado. De la misma manera, si el centro de rotación está en la trayectoria lineal del movimiento del seguidor, podemos llamarlo concéntrico.
Además, también podemos considerar métodos para mantener relaciones de bloqueo de alta tensión y dividir el mecanismo en bloqueo geométrico y bloqueo de fuerza.
Combinando la forma de la leva, el extremo del seguidor y los patrones de movimiento del seguidor, podemos determinar el nombre del mecanismo diseñado, como por ejemplo: la leva de disco con un seguidor de acción directa de nariz afilada (posición relativa seguidor-leva + extremo del seguidor + patrón de movimiento del seguidor + forma de la leva).
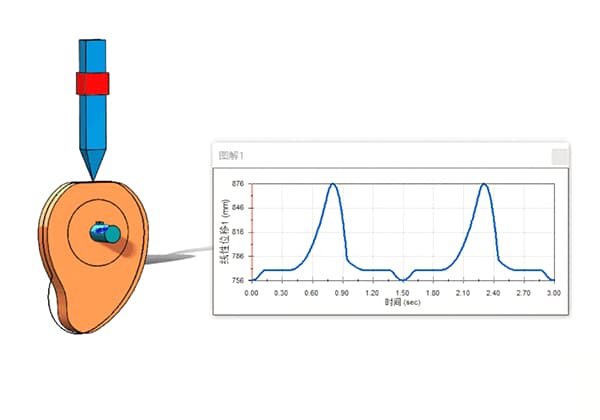
El proceso de movimiento de los mecanismos de levas
Mecanismo de levas
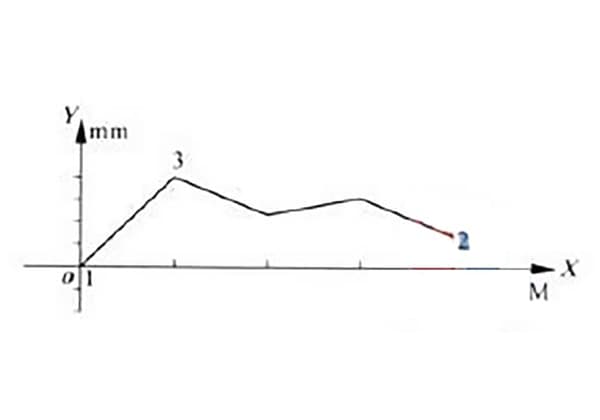
En primer lugar, tenemos una leva con un seguidor colocado sobre ella. Cuando la leva gira a una velocidad angular ω de φs grados, el seguidor no se mueve. En este momento, llamamos φs al ángulo de permanencia, y el círculo que le corresponde se llama círculo base. Del mismo modo, el radio de este círculo se denomina radio del círculo base r0.
Entonces, a medida que continuamos girando la leva a una velocidad angular ω en φ grados, el seguidor se eleva en h. En este momento, llamamos φ al ángulo de carrera, y h se llama carrera.
Después, cuando el seguidor alcanza el punto h, lo dejamos permanecer un tiempo. Mientras tanto, la leva gira φs', que corresponde al ángulo de elevación.
Por último, necesitamos devolver el seguidor a su posición original, por lo que giramos la leva φ'. En este momento, el seguidor vuelve al punto de partida. Llamamos φ' al ángulo de retorno.
Cómo diseñar un mecanismo de levas?
Existen dos métodos principales para diseñar mecanismos de levas, uno es el método gráfico y el otro es el método analítico.
El primero es relativamente sencillo, ya que sólo requiere que se proporcione el diagrama de movimiento de empuje deseado y, a continuación, se obtiene la curva de contorno correspondiente a partir de la relación ángulo-proceso proporcionada por el diagrama.
La precisión no es muy alta. Esta última se calcula, y su cálculo es relativamente complejo, lo que resulta adecuado para diseñar mecanismos de levas con requisitos de precisión elevados.
Como fundador de MachineMFG, he dedicado más de una década de mi carrera a la industria metalúrgica. Mi amplia experiencia me ha permitido convertirme en un experto en los campos de la fabricación de chapa metálica, mecanizado, ingeniería mecánica y máquinas herramienta para metales. Estoy constantemente pensando, leyendo y escribiendo sobre estos temas, esforzándome constantemente por mantenerme a la vanguardia de mi campo. Deje que mis conocimientos y experiencia sean un activo para su empresa.
¿Alguna vez se ha preguntado cómo configurar un servocontrolador para obtener el máximo rendimiento? Esta guía cubre todo lo que necesita saber sobre el ajuste de los parámetros de ganancia, desde el control de posición hasta la regulación de la velocidad....
¿Cómo puede evitar que sus moldes se agrieten durante el tratamiento térmico? Este artículo se sumerge en el intrincado proceso del tratamiento térmico de moldes y describe los defectos más comunes, como...
¿Ha pensado alguna vez en la precisión necesaria para apretar los tornillos de las bridas? Una técnica adecuada puede evitar fugas y garantizar la seguridad en sistemas de alta presión. Este artículo profundiza en los métodos esenciales para...
¿Cómo se mide la rectitud de un raíl guía para garantizar la precisión de las operaciones de la máquina? Este artículo explora dos métodos comunes: el método de conexión de dos puntos extremos y la condición mínima...
¿Cómo consiguen las pulidoras ese acabado perfecto en las superficies metálicas? En este artículo, exploramos los intrincados mecanismos que se esconden tras estas herramientas esenciales. Desde los componentes que intervienen hasta la...
Este artículo se sumerge en el fascinante mundo de la producción de piezas de fundición, revelando el proceso paso a paso que convierte las materias primas en componentes esenciales. Conozca las técnicas, los materiales y los controles de calidad implicados,...
Imagine producir miles de piezas de plástico complejas cada día con una precisión y velocidad milimétricas. El moldeo por inyección, una técnica de fabricación transformadora, lo hace posible inyectando material fundido en moldes para...
Imagine desbloquear la precisión de las máquinas herramienta con una simple superficie de cristal. Las escalas de rejilla lineal hacen precisamente eso, transformar líneas finas en mediciones de gran precisión. Este artículo explora cómo estas...
¿Alguna vez se ha preguntado cómo funcionan los engranajes de su coche o su avión? Este artículo desvela los principales fabricantes de engranajes que están dando forma al futuro de la ingeniería mecánica. Aprenderá...