Explicación de los 3 modos de control de servomotores
¿Alguna vez se ha preguntado cómo consiguen las máquinas movimientos precisos? Este blog se sumerge en el fascinante mundo de los modos de control de los servomotores. Desde el control por impulsos hasta el analógico, exploraremos cómo funciona cada método y dónde se aplica mejor. Prepárese para descubrir los secretos de la precisión y la eficacia de la maquinaria moderna.
Los servomotores se utilizan ampliamente en diversas aplicaciones debido a su precisión y fiabilidad. Uno de los métodos más comunes de controlar servomotores, especialmente en pequeños equipos autónomos, es mediante el control por pulsos. Este método es sencillo y fácil de entender, lo que lo convierte en una opción popular para el posicionamiento de motores.
Concepto básico de control
El modo de control por impulsos funciona según dos principios fundamentales:
Recuento total de impulsos: Determina el desplazamiento del motor. El número de impulsos enviados al servomotor corresponde directamente a la distancia que se desplazará el motor. Por ejemplo, si un servomotor requiere 2000 pulsos para completar una rotación completa, el envío de 1000 pulsos resultará en media rotación.
Frecuencia de impulsos: Determina la velocidad del motor. La frecuencia a la que se envían los impulsos al motor determina la velocidad a la que se moverá el motor. A mayor frecuencia de impulsos, mayor velocidad del motor, mientras que a menor frecuencia, menor velocidad.
Aplicación del control de impulsos
Para implementar el control por pulsos para un servomotor, siga estos pasos:
Seleccionar el modo de control de impulsos: Asegúrese de que el servomotor y su controlador están configurados para funcionar en modo de control por impulsos. Esto puede hacerse normalmente a través de los ajustes de configuración del motor o seleccionando el modo adecuado en el software del controlador.
Determinar las necesidades de pulso: Consulte el manual del servomotor para comprender la relación entre los impulsos y el movimiento del motor. El manual proporcionará una tabla o fórmula que indica cuántos pulsos se requieren para movimientos específicos.
Generar impulsos: Utilice un generador de impulsos o un microcontrolador para generar los impulsos necesarios. El generador de impulsos debe ser capaz de producir impulsos con la frecuencia y el recuento deseados.
Enviar impulsos al motor: Conecte el generador de impulsos a la entrada del servomotor. El motor recibirá los impulsos y se moverá en consecuencia. Asegúrese de que las conexiones son seguras y de que el generador de impulsos está configurado correctamente.
Tabla de ejemplo del manual del servomotor
He aquí un ejemplo de lo que podría ser una tabla típica de un manual de servomotor:
Forma de impulso de mando
Nombre de la señal
Orden de dirección positiva
Comando de dirección negativa
Diferencia de fase de 90 bits
Impulso bifásico Fase A + B
SEÑAL PULS
B es 90 grados más rápida que la fase a
B es 90 grados más lenta que la fase a
Tren de impulsos positivo + tren de impulsos negativo
SEÑAL PULS
Pulso + símbolo
SEÑAL PULS
Ventajas del control por impulsos
Simplicidad: El control por impulsos es fácil de implementar y comprender, por lo que resulta adecuado para diversas aplicaciones.
Precisión: Controlando el número y la frecuencia de los impulsos, se consigue un posicionamiento y un control de la velocidad precisos.
Flexibilidad: El control por pulsos puede utilizarse con varios tipos de servomotores y controladores, lo que proporciona flexibilidad en el diseño del sistema.
Métodos de implementación de controladores de motor controlados por impulsos
En el ámbito del control de motores, especialmente en aplicaciones de alta velocidad, los métodos de control de pulsos son cruciales para determinar el sentido de giro y la velocidad del motor. A continuación, exploramos tres métodos distintos de control por pulsos, cada uno con sus características, ventajas y limitaciones únicas.
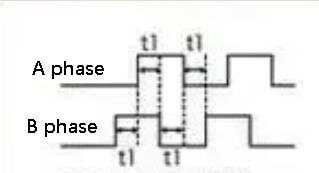
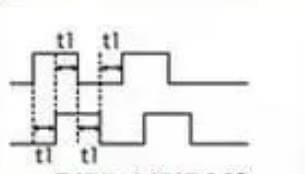
Método 1: Control diferencial
Implantación:
El conductor recibe dos impulsos de alta velocidad, etiquetados como 𝑎a y 𝑏b.
El sentido de giro del motor viene determinado por la diferencia de fase entre estos dos impulsos.
Si el pulso 𝑏b conduce pulso 𝑎a 90 grados, el motor gira en sentido positivo.
Si el pulso 𝑏b retrasa el impulso 𝑎a 90 grados, el motor gira en sentido inverso.
Características:
Pulsos alternos: Los impulsos bifásicos se alternan, lo que da lugar al término "control diferencial".
Anti-interferencia: Este método presenta una mayor capacidad antiinterferente, lo que lo hace adecuado para entornos con fuertes interferencias electromagnéticas.
Limitaciones:
Recursos intensivos: Requiere dos puertos de impulsos de alta velocidad para un solo eje del motor, lo que puede suponer una limitación en sistemas con disponibilidad limitada de puertos de impulsos de alta velocidad.
Método 2: Control secuencial de impulsos
Implantación:
El conductor sigue recibiendo dos impulsos de alta velocidad, pero no existen simultáneamente.
Cuando un pulso está activo, el otro debe estar inactivo.
Un pulso controla la dirección positiva, mientras que el otro controla la dirección negativa.
Características:
Pulsos secuenciales: Garantiza que sólo se emita un impulso en cada momento, evitando conflictos de impulsos simultáneos.
Limitaciones:
Recursos intensivos: Al igual que el control diferencial, este método también requiere dos puertos de impulsos de alta velocidad para un solo eje del motor.
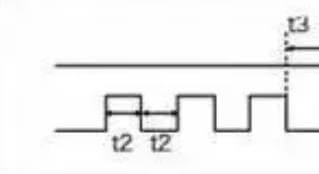
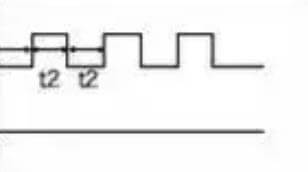
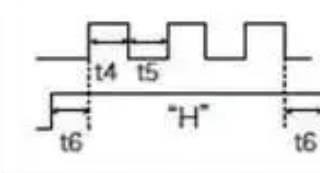
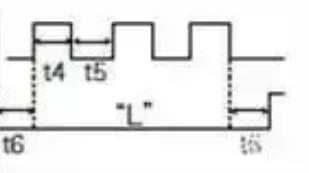
Método 3: Pulso único con señal IO direccional
Implantación:
El conductor recibe una única señal de impulso de alta velocidad.
El sentido de giro del motor se controla mediante una señal IO direccional adicional.
Características:
Control más sencillo: Este método simplifica la lógica de control al reducir el número de señales de impulso necesarias.
Uso eficiente de los recursos: Ocupa menos puertos de impulsos de alta velocidad, por lo que es ideal para sistemas más pequeños con recursos limitados.
Limitaciones:
Anti-interferencia inferior: Aunque es más sencillo, este método puede no ofrecer el mismo nivel de capacidad antiinterferente que el control diferencial.
Resumen
Cada método de control de impulsos ofrece ventajas distintas y es adecuado para diferentes escenarios de aplicación:
Control diferencial: Es el mejor para entornos con muchas interferencias debido a su mayor capacidad antiinterferente, pero requiere más recursos.
Control secuencial de impulsos: Ofrece un equilibrio entre la complejidad del control y el uso de recursos, pero sigue necesitando dos puertos de impulsos de alta velocidad.
Pulso único con señal IO direccional: Ideal para sistemas pequeños con recursos limitados, ya que ofrece sencillez y eficacia a costa de una capacidad antiinterferente potencialmente menor.
Al seleccionar un método de control, tenga en cuenta los requisitos específicos de su aplicación, incluido el nivel de interferencia, la disponibilidad de recursos y la complejidad del control.
2. Modo de control analógico del servomotor
En aplicaciones en las que se requiere un control preciso de la velocidad de un servomotor, el control analógico puede ser un método eficaz. Este modo utiliza una señal analógica para regular la velocidad del motor, ofreciendo un enfoque sencillo y flexible.
Selección de cantidad analógica
La señal de control analógica puede ser una tensión o una corriente. Cada método tiene sus propias ventajas y consideraciones:
Modo de tensión
En el modo de tensión, la señal de control es una tensión específica aplicada a la entrada de control del servomotor. Este método es relativamente sencillo de implementar e incluso se puede conseguir utilizando un potenciómetro para ajustes manuales. Estos son los puntos clave:
Aplicación: Aplica una tensión específica al extremo de la señal de control.
Facilidad de uso: Configuración sencilla, a menudo mediante un potenciómetro.
Idoneidad: Ideal para aplicaciones sencillas con interferencias ambientales mínimas.
Sin embargo, las señales de tensión son susceptibles al ruido y las interferencias, sobre todo en entornos complejos. Esto puede dar lugar a un control inestable del motor, haciéndolo menos fiable en tales escenarios.
Modo actual
El control en modo de corriente requiere un módulo de salida de corriente para generar la señal de control. A pesar del requisito de hardware adicional, las señales de corriente ofrecen ventajas significativas en términos de estabilidad y fiabilidad:
Aplicación: Requiere un módulo de salida de corriente.
Antiinterferencias: Gran resistencia al ruido ambiental y a las interferencias.
Idoneidad: Óptimo para entornos complejos en los que el control estable es fundamental.
La naturaleza robusta de las señales de corriente las hace preferibles en entornos industriales u otras aplicaciones en las que las condiciones ambientales pueden afectar a la integridad de la señal.
3. Modo de control de comunicación del servomotor
Los servomotores son componentes críticos en diversas aplicaciones industriales, ya que proporcionan un control preciso del movimiento. El modo de control de comunicación de los servomotores es esencial para lograr un funcionamiento eficaz y preciso, especialmente en sistemas complejos y de gran escala. A continuación, exploramos los protocolos de comunicación más comunes utilizados para el control de servomotores y sus ventajas.
Protocolos comunes de comunicación
CAN (Red de área de controlador)
Visión general: CAN es un robusto estándar de bus para vehículos diseñado para permitir que microcontroladores y dispositivos se comuniquen entre sí sin necesidad de un ordenador central.
Ventajas: Alta fiabilidad, capacidades en tiempo real y mecanismos de detección de errores.
Aplicaciones: Muy utilizado en sistemas de automoción y automatización industrial.
EtherCAT (Ethernet para tecnología de automatización de control)
Visión general: EtherCAT es un sistema de bus de campo basado en Ethernet diseñado para aplicaciones de control en tiempo real.
Ventajas: Comunicación de alta velocidad, baja latencia y capacidad de sincronización.
Aplicaciones: Ideal para aplicaciones de alto rendimiento como robótica, máquinas CNC y sistemas de control de movimiento.
MODBUS
Visión general: MODBUS es un protocolo de comunicación serie publicado originalmente por Modicon para su uso con sus controladores lógicos programables (PLC).
Ventajas: Simplicidad, facilidad de aplicación y amplia adopción.
Aplicaciones: Comúnmente utilizado en entornos industriales para conectar dispositivos electrónicos.
PROFIBUS (bus de campo de proceso)
Visión general: PROFIBUS es un estándar para la comunicación por bus de campo en la tecnología de automatización.
Ventajas: Alta velocidad de transmisión de datos, fiabilidad y amplias capacidades de diagnóstico.
Aplicaciones: Se utiliza en la automatización de fábricas y procesos.
Ventajas del control de la comunicación en los servomotores
El uso de protocolos de comunicación para controlar servomotores ofrece varias ventajas, sobre todo en aplicaciones de sistemas complejos y a gran escala:
Escalabilidad: El tamaño del sistema y el número de ejes del motor pueden ajustarse fácilmente sin cambios significativos en la infraestructura.
Menor complejidad del cableado: El control por comunicación reduce la necesidad de un extenso cableado de control, simplificando la instalación y el mantenimiento.
Flexibilidad: El sistema construido es muy flexible, lo que permite integrar y reconfigurar fácilmente los componentes.
Diagnóstico mejorado: Los protocolos de comunicación suelen incluir funciones de diagnóstico que ayudan a supervisar y solucionar los problemas del sistema.
Control en tiempo real: Protocolos como EtherCAT proporcionan capacidades de control en tiempo real, esenciales para aplicaciones que requieren sincronización y temporización precisas.
4. Ampliación de los modos de control de servomotores
1. Control del par del servomotor
El modo de control de par permite el ajuste preciso del par de salida externo del eje del motor mediante la entrada de una señal analógica externa o la asignación directa de direcciones. Este modo es especialmente útil en aplicaciones en las que es crucial mantener una tensión constante del material.Por ejemplo:
Si una entrada de 10 V corresponde a un par de 5 Nm, una entrada de 5 V dará como resultado un par de salida de 2,5 Nm.
Cuando la carga sobre el eje del motor es inferior a 2,5 Nm, el motor gira hacia delante.
Cuando la carga externa es igual a 2,5 Nm, el motor permanece parado.
Cuando la carga supera los 2,5 Nm, el motor invierte el sentido de giro (habitual en sistemas cargados por gravedad).
Aplicaciones:
Dispositivos de enrollado y desenrollado, como los utilizados en la fabricación textil o los equipos de tracción de fibra óptica, en los que la tensión del material debe permanecer constante.
Los ajustes en tiempo real de la configuración del par pueden realizarse modificando la entrada analógica o cambiando el valor a través de protocolos de comunicación, lo que garantiza una tensión constante del material a pesar de los cambios en el radio de bobinado.
2. Control de posición del servomotor
En el modo de control de posición, la velocidad de rotación del motor suele venir determinada por la frecuencia de los impulsos de entrada externos, mientras que el ángulo de rotación se controla mediante el número de impulsos.Características:
Algunos servosistemas permiten la asignación directa de valores de velocidad y desplazamiento a través de la comunicación.
Este modo ofrece un control preciso de la velocidad y la posición, por lo que es ideal para aplicaciones que requieren una gran precisión.
Aplicaciones:
Dispositivos de posicionamiento
Máquinas herramienta CNC
Maquinaria de impresión
3. Modo de velocidad del servomotor
El modo de velocidad permite controlar la velocidad de rotación del motor mediante entrada analógica o frecuencia de impulsos.Características:
Con el control PID de bucle exterior desde un dispositivo de control superior, el modo de velocidad también puede utilizarse para el posicionamiento.
La señal de posición del motor o de la carga directa debe retroalimentarse al ordenador superior para su procesamiento.
Admite la detección directa de la posición del anillo exterior de la carga, en la que el codificador del eje del motor sólo mide la velocidad y un dispositivo independiente en el extremo de la carga proporciona la señal de posición.
Ventajas:
Reduce los errores en la transmisión intermedia
Mejora la precisión general de posicionamiento del sistema
4. Comprender los tres bucles
Los servosistemas suelen funcionar con tres sistemas de regulación PID de realimentación negativa en bucle cerrado: el bucle de corriente, el bucle de velocidad y el bucle de posición.Bucle actual:
El bucle más interno, gestionado íntegramente dentro del servocontrolador.
Detecta y ajusta la corriente de salida de cada fase del motor mediante un dispositivo Hall.
Controla el par del motor con una carga computacional mínima y una respuesta dinámica rápida.
Bucle de velocidad:
El segundo bucle, que utiliza la retroalimentación del codificador del motor.
La salida PID del bucle de velocidad ajusta el bucle de corriente, lo que significa que el control de velocidad incluye intrínsecamente el control de corriente.
Esencial para cualquier modo de control, ya que el bucle de corriente constituye la base del control.
Bucle de posición:
El bucle más externo, que puede configurarse entre el excitador y el codificador del motor o entre un controlador externo y el codificador del motor/carga final.
La salida interna del bucle de control de posición ajusta el bucle de velocidad, lo que requiere el funcionamiento de los tres bucles en modo de control de posición.
Este modo implica el mayor esfuerzo computacional y tiene la respuesta dinámica más lenta.
Conclusión
Comprender los distintos modos de control y el sistema de tres bucles de los servomotores es esencial para optimizar su rendimiento en diversas aplicaciones industriales. Cada modo ofrece ventajas únicas y se adapta a tareas específicas, garantizando un control preciso del par, la posición y la velocidad.
Como fundador de MachineMFG, he dedicado más de una década de mi carrera a la industria metalúrgica. Mi amplia experiencia me ha permitido convertirme en un experto en los campos de la fabricación de chapa metálica, mecanizado, ingeniería mecánica y máquinas herramienta para metales. Estoy constantemente pensando, leyendo y escribiendo sobre estos temas, esforzándome constantemente por mantenerme a la vanguardia de mi campo. Deje que mis conocimientos y experiencia sean un activo para su empresa.
Los servosistemas son parte integrante de los productos electromecánicos y proporcionan el máximo nivel de respuesta dinámica y densidad de par. De ahí que la tendencia en el desarrollo de sistemas de accionamiento sea sustituir los tradicionales...
En el vertiginoso mundo de la automatización industrial, los servomotores son los héroes anónimos que impulsan la precisión y la eficacia. Pero con innumerables fabricantes compitiendo por la atención, ¿cómo saber cuáles...
¿Alguna vez se ha preguntado cómo configurar un servocontrolador para obtener el máximo rendimiento? Esta guía cubre todo lo que necesita saber sobre el ajuste de los parámetros de ganancia, desde el control de posición hasta la regulación de la velocidad....
Elegir el servomotor adecuado para su proyecto puede ser una tarea desalentadora con tantas opciones disponibles. Este artículo simplifica el proceso desglosando las consideraciones clave: aplicación...
Con la mejora de la relación coste-rendimiento de los equipos de imagen y la velocidad del procesamiento informático de la información, junto con el perfeccionamiento de las teorías relacionadas, la servotecnología de visión ha cumplido las condiciones técnicas...
¿Cómo consiguen las máquinas modernas un control preciso en tareas complejas? Los servosistemas tienen la respuesta. Este artículo profundiza en los principios de los servosistemas y analiza su funcionamiento y...
¿Alguna vez se ha preguntado cómo seleccionan las máquinas el motor perfecto? Este artículo desvela el fascinante proceso que hay detrás de la elección del servomotor adecuado para diversas tareas mecánicas. Sumérjase para comprender los cálculos...
¿Qué hace que los servomotores y los motores paso a paso sean distintos pero fundamentales en la maquinaria moderna? Este artículo explora sus diferencias fundamentales, ventajas y aplicaciones específicas. Al leerlo, conocerá mejor sus...
¿Alguna vez se ha preguntado por qué su servomotor tiembla de repente, interrumpiendo el buen funcionamiento de su máquina? Este artículo desvela las causas más comunes de las vibraciones del servomotor y ofrece soluciones prácticas para...