¿Cómo funcionan los motores eléctricos? Guía completa
¿Cómo convierten los motores eléctricos la electricidad en movimiento? Imagínese un mundo en el que casi la mitad de la energía que consumimos se mueve gracias a estos motores. Este artículo se adentra en la ciencia de los motores eléctricos y explica cómo utilizan los campos magnéticos y la corriente para producir movimientos rotativos o lineales. Al conocer los distintos tipos, como los motores de corriente continua y alterna, y sus mecanismos internos, comprenderá mejor el papel crucial que desempeñan en la tecnología moderna. ¿Listo para desentrañar los misterios de estos dispositivos omnipresentes? Siga leyendo para explorar los principios y aplicaciones de los motores eléctricos.
Casi la mitad del consumo mundial de energía se atribuye a los motores eléctricos, por lo que mejorar su eficiencia se considera la medida más eficaz para abordar los problemas energéticos mundiales.
Tipos de motores
En general, los motores convierten la fuerza generada por el flujo de corriente en un campo magnético en movimiento de rotación, pero, en líneas generales, esto también incluye el movimiento lineal.
En función del tipo de fuente de energía que acciona el motor, pueden clasificarse en motores de CC y de CA.
Además, según el principio de rotación del motor, pueden dividirse a grandes rasgos en las siguientes categorías, excluidos los motores especiales.
1. Motores de CC (corriente continua)
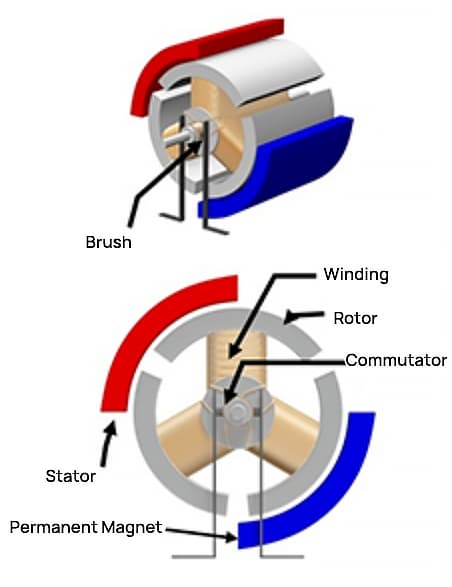
(1) Motores con escobillas
Los motores de escobillas, ampliamente utilizados, suelen denominarse motores de corriente continua. Giran poniendo en contacto secuencialmente los electrodos llamados "escobillas" (en el lado del estator) y el "conmutador" (en el lado del inducido) para conmutar la corriente.
(2) Motores de corriente continua sin escobillas
Los motores de corriente continua sin escobillas no necesitan escobillas ni conmutadores. Utilizan funciones de conmutación como transistores para conmutar la corriente y lograr el movimiento de rotación.
(3) Motores paso a paso
Este motor funciona de forma sincronizada con la potencia de impulsos, por lo que también se conoce como motor de impulsos. Su característica es la capacidad de lograr fácilmente una operación de posicionamiento precisa.
2. Motores de CA (corriente alterna)
(1) Motores asíncronos
La corriente alterna genera un campo magnético giratorio en el estator, haciendo que el rotor induzca corriente y gire bajo su interacción.
(2) Motores síncronos
La corriente alterna crea un campo magnético giratorio, y el rotor con polos magnéticos gira por atracción. La velocidad de rotación se sincroniza con la frecuencia de alimentación.
Motor paso a paso
Motor de corriente continua con escobillas
Motor de corriente continua sin escobillas
Corriente, campos magnéticos y fuerza
En primer lugar, para facilitar las explicaciones posteriores sobre los principios motores, repasemos las leyes/reglas básicas relativas a la corriente, los campos magnéticos y la fuerza.
Aunque pueda evocar un sentimiento de nostalgia, estos conocimientos pueden olvidarse fácilmente si los componentes magnéticos no se utilizan con regularidad.
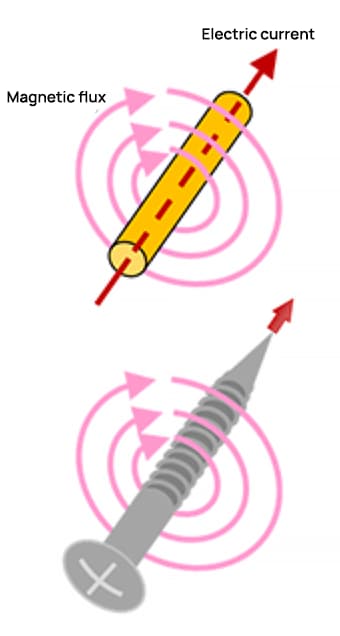
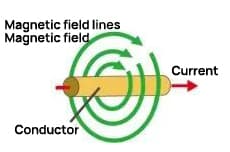
Ley de Ampere (regla del tornillo de la mano derecha)
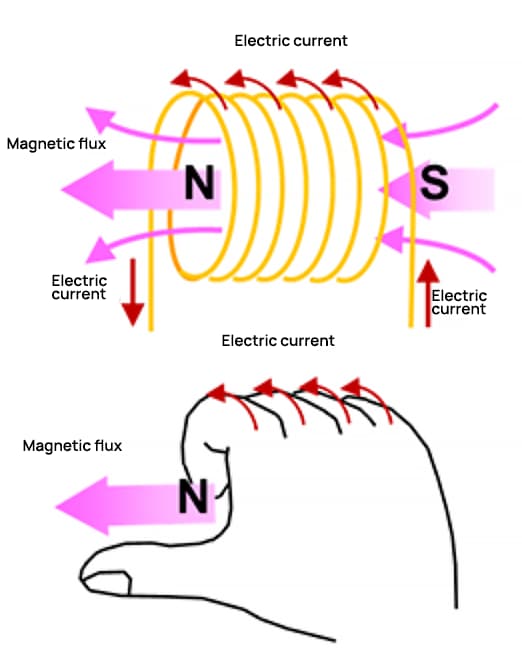
El flujo magnético generado por una corriente en una bobina
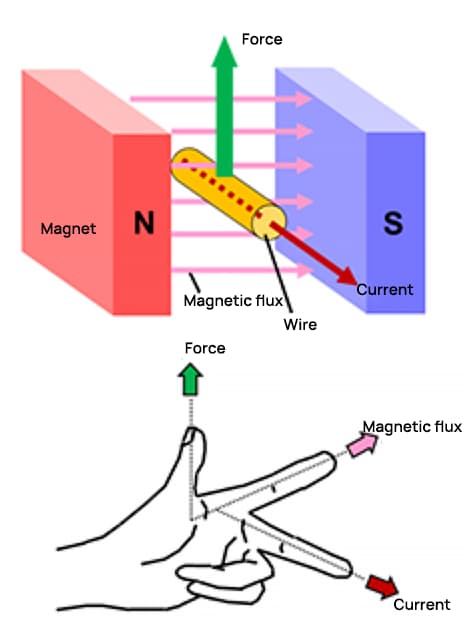
Basado en la regla de la mano izquierda de Fleming
Lo ilustraremos con imágenes y ecuaciones.
Diagrama esquemático de la rotación del motor
Cuando la armadura de alambre es rectangular, hay que considerar la fuerza que actúa sobre la corriente. La fuerza F ejercida sobre las partes a y c del armazón es:
El par se genera alrededor del eje central. Por ejemplo, si se considera un estado en el que el ángulo de rotación es sólo θ, la fuerza que actúa en ángulo recto con b y d es sinθ. En consecuencia, el par Ta en la parte a se representa mediante la siguiente fórmula:
Considerando la parte C de la misma manera, el par se duplica, generando un par calculado mediante la siguiente fórmula:
Dado que el área de un rectángulo es S = h*l, se puede obtener el siguiente resultado sustituyéndolo en la fórmula anteriormente mencionada:
Esta fórmula no sólo es aplicable a los rectángulos, sino también a otras formas comunes como los círculos. Este principio subyace en el funcionamiento de los motores eléctricos.
¿Cómo gira un motor?
1) Los motores giran utilizando imanes y fuerza magnética.
Alrededor de un imán permanente con un eje giratorio:
① Gira el imán (para generar un campo magnético giratorio).
② Esto sigue el principio de que los polos opuestos (N y S) se atraen, mientras que los polos iguales se repelen.
③ El imán con el eje giratorio girará entonces.
Este es el principio básico de la rotación del motor.
La corriente que circula por el conductor genera un campo magnético giratorio a su alrededor, haciendo girar el imán, que en esencia representa el mismo estado de movimiento.
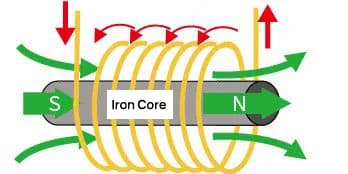
Además, cuando un conductor se enrolla en una bobina, las fuerzas magnéticas se sintetizan para formar un gran flujo magnético, creando un polo Norte y un polo Sur.
Además, al insertar un núcleo ferroso en el conductor en espiral, las líneas de campo magnético pueden atravesarlo más fácilmente, generando así una fuerza magnética más intensa.
2) Motores rotativos operativos
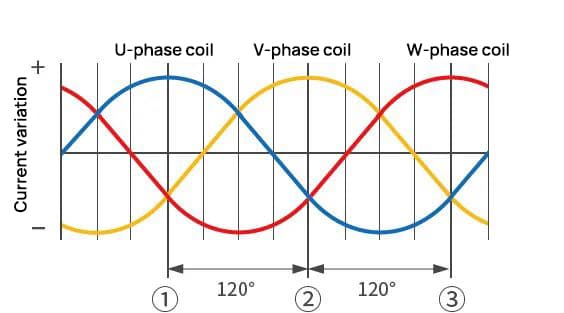
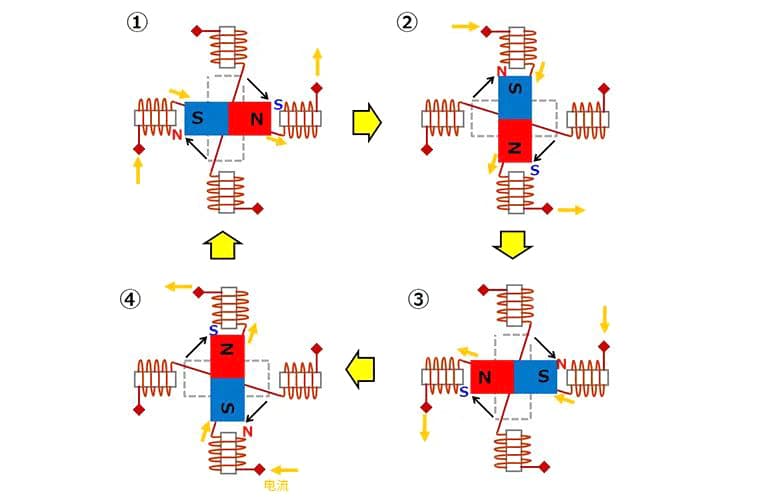
En este contexto, presentamos un enfoque práctico para motores rotativos, demostrando el uso de corriente alterna trifásica y bobinas para generar un campo magnético giratorio. (La corriente alterna trifásica se refiere a señales alternas desfasadas a intervalos de 120°).
El campo magnético sintetizado en el citado Estado ① corresponde a la Figura ① siguiente.
El campo magnético sintetizado en el Estado ② anteriormente mencionado se alinea con la Figura ② que se muestra a continuación.
El campo magnético sintetizado asociado al Estado ③ antes mencionado se representa en la Figura ③ siguiente.
Como ya se ha indicado, la bobina enrollada alrededor del núcleo de hierro se divide en tres fases: Bobina de fase U, bobina de fase V y bobina de fase W, dispuestas a intervalos de 120°. La bobina de mayor tensión genera un polo norte, mientras que la de menor tensión genera un polo sur.
Cada fase varía en función de la onda sinusoidal, por lo que cambiará la polaridad (polo norte o sur) y el campo magnético (fuerza magnética) generado por cada bobina.
En este punto, si sólo consideramos la bobina que genera el polo norte, la secuencia de cambios va de la bobina en fase U a la bobina en fase V, luego a la bobina en fase W y finalmente de vuelta a la bobina en fase U, produciéndose así una rotación.
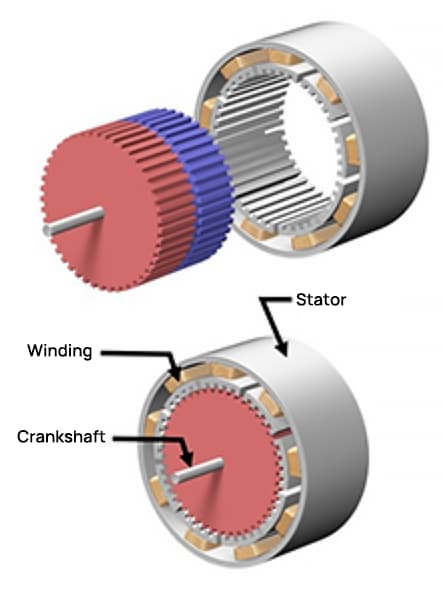
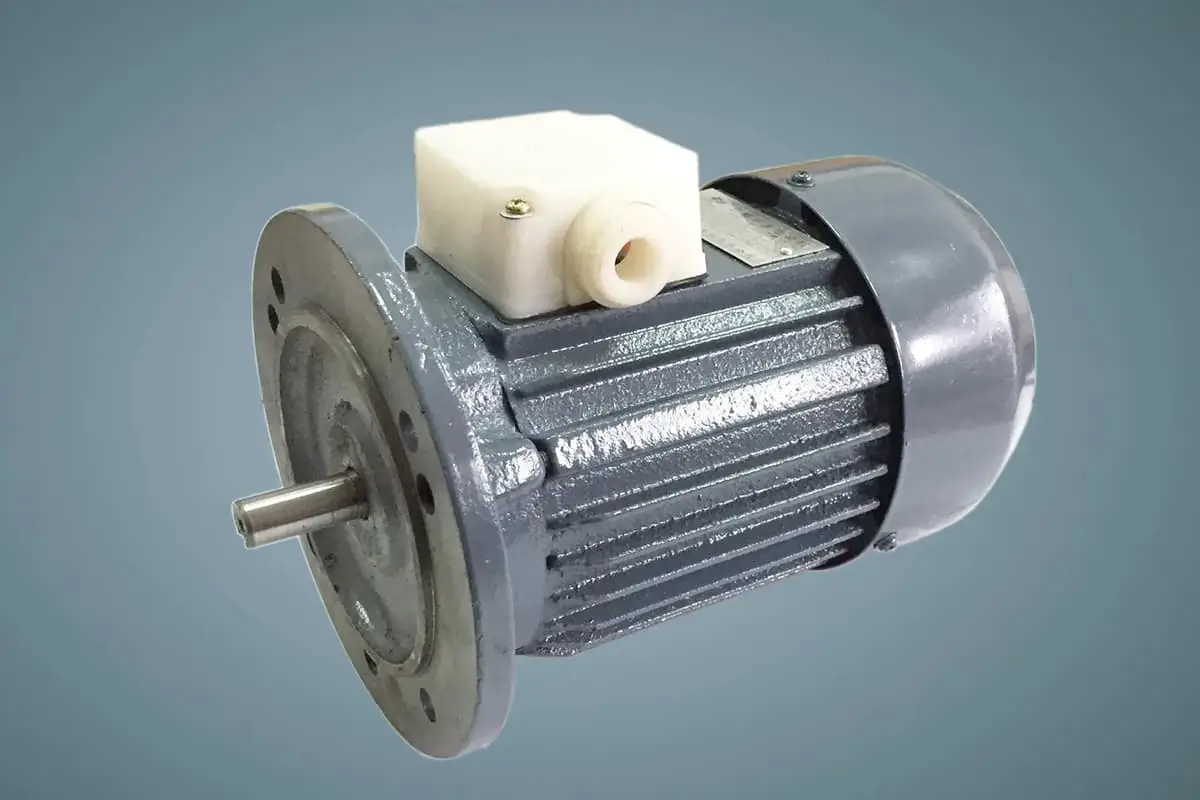
Estructura de los motores pequeños
La siguiente figura muestra la construcción general y la comparación de tres tipos de motores: motores paso a paso, motores de corriente continua (CC) con escobillas y motores de corriente continua (CC) sin escobillas.
Los componentes básicos de estos motores incluyen principalmente bobinas, imanes y rotores. Debido a sus diversos tipos, se clasifican a su vez en motores de bobina fija y motores de imán fijo.
Motor paso a paso
Motor de corriente continua con escobillas
Motor de corriente continua sin escobillas
A continuación se presenta una descripción estructural relacionada con el diagrama de ejemplo. Por favor, comprenda que este documento introduce la estructura dentro de un marco amplio, ya que puede haber otras estructuras si se divide con más detalle.
Las bobinas del motor paso a paso están fijas en el exterior y los imanes giran en el interior; los imanes del motor de corriente continua con escobillas están fijos en el exterior y las bobinas giran en el interior.
La alimentación de las bobinas y el cambio de sentido de la corriente se realizan mediante escobillas y conmutadores; en los motores sin escobillas, las bobinas están fijas en el exterior y los imanes giran en el interior.
Debido a las variaciones en los tipos de motor, incluso con los mismos componentes básicos, sus estructuras pueden diferir. Los detalles específicos se explicarán en cada sección.
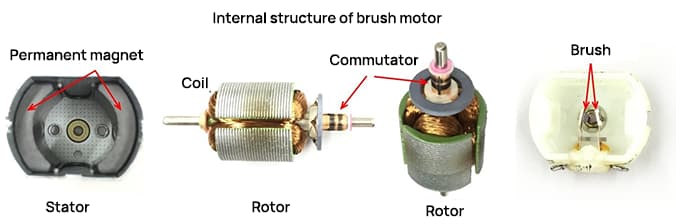
Motor cepillado
Estructura del motor de escobillas
La imagen de abajo muestra el exterior de un motor de CC con escobillas de uso común en maquetas, así como un despiece de un motor típico de dos polos (dos imanes) y tres ranuras (tres bobinas). Es posible que muchos tengan experiencia desmontando motores y quitando imanes.
En un motor de CC con escobillas, los imanes permanentes están fijos mientras que las bobinas pueden girar alrededor del centro interno. El lado estacionario se conoce como "estator" y el lado giratorio como "rotor".
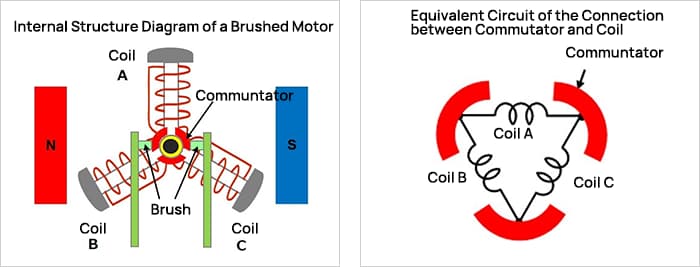
He aquí un diagrama esquemático que ilustra los conceptos estructurales.
El eje central de rotación está rodeado por tres conmutadores, placas metálicas curvadas utilizadas para la conmutación de la corriente eléctrica. Para evitar que entren en contacto entre sí, los conmutadores están separados 120° (360° ÷ 3 unidades). Estos conmutadores giran con el eje.
Cada conmutador está conectado a un extremo de una bobina y a otro, y juntos, los tres conmutadores y las tres bobinas forman una red de circuito completa (anillo).
Dos escobillas se fijan a 0° y 180° para hacer contacto con los conmutadores. Una fuente de corriente continua externa se conecta a las escobillas, y la corriente fluye a lo largo del recorrido de la escobilla al conmutador, del conmutador a la bobina, y de la bobina de vuelta a la escobilla.
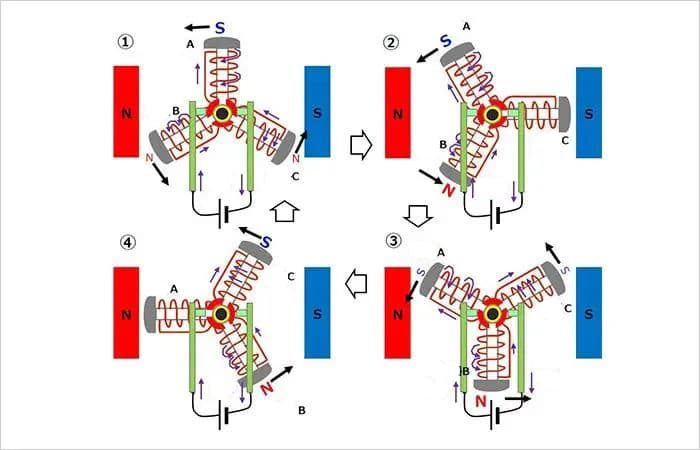
Este es el principio de rotación de un motor con escobillas.
① Rotación en sentido contrario a las agujas del reloj desde el estado inicial.
La bobina A está en la parte superior, con la fuente de alimentación conectada a las escobillas, designando el lado izquierdo como (+) y el derecho como (-). Una corriente elevada fluye desde la escobilla izquierda a través del conmutador hacia la bobina A. Esto convierte la parte superior (exterior) de la bobina A en un polo sur (S).
Dado que la mitad de la corriente de la bobina A fluye desde la escobilla izquierda hacia las bobinas B y C en dirección opuesta a la bobina A, los lados exteriores de las bobinas B y C se convierten en polos norte (N) débiles, indicados con letras más pequeñas en el diagrama.
Los campos magnéticos generados en estas bobinas, junto con la repulsión y atracción de los imanes, proporcionan una fuerza que hace girar las bobinas en sentido antihorario.
② Más rotación en sentido contrario a las agujas del reloj.
A continuación, suponiendo que la bobina A haya girado 30° en sentido antihorario, la escobilla derecha entra en contacto con los dos conmutadores.
La corriente en la bobina A sigue fluyendo desde la escobilla izquierda a través de la escobilla derecha, y el lado exterior de la bobina sigue siendo un polo sur. La misma corriente fluye por la bobina B, convirtiendo su lado exterior en un polo norte más fuerte. La bobina C está cortocircuitada por las escobillas en ambos extremos, por lo que no hay flujo de corriente y no se genera campo magnético.
Incluso en este estado, se aplica una fuerza de rotación en sentido antihorario. De ③ a ④, la bobina superior sigue siendo impulsada hacia la izquierda, y la bobina inferior sigue siendo impulsada hacia la derecha, lo que resulta en una rotación continua en sentido antihorario.
Cada 30° de rotación de la bobina a los estados ③ y ④, cuando la bobina está por encima del eje horizontal central, su lado exterior se convierte en polo sur; cuando está por debajo, se convierte en polo norte, y este movimiento se repite.
En otras palabras, la bobina superior experimenta repetidamente una fuerza hacia la izquierda, y la bobina inferior una fuerza hacia la derecha (ambas en el sentido contrario a las agujas del reloj). Esto mantiene el rotor girando en sentido antihorario.
Si la fuente de alimentación se conecta a las escobillas izquierda (-) y derecha (+) opuestas, se genera un campo magnético inverso en la bobina, invirtiendo así el sentido de la fuerza aplicada a la bobina, haciéndola girar en el sentido de las agujas del reloj.
Además, cuando se desconecta la fuente de alimentación, el rotor del motor con escobillas deja de girar debido a la ausencia del campo magnético que impulsaba su rotación.
Motor trifásico sin escobillas de onda completa
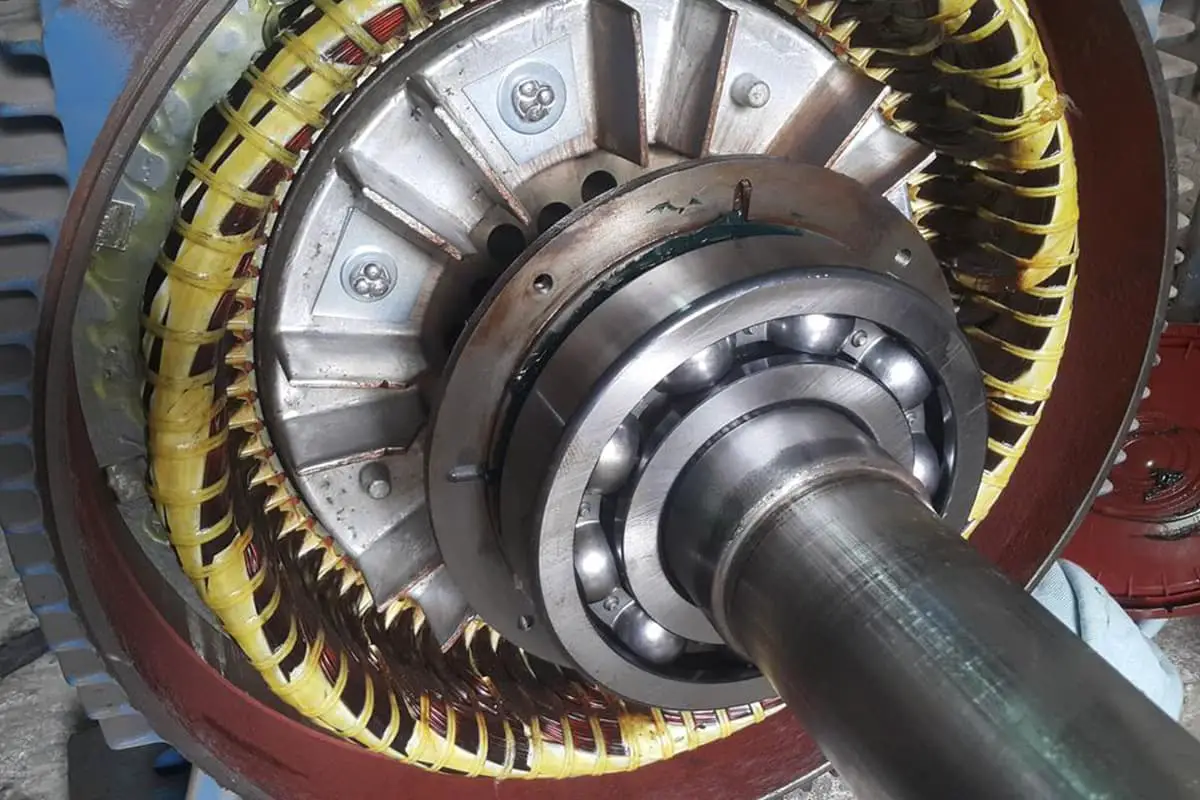
Aspecto y estructura del motor trifásico sin escobillas de onda completa
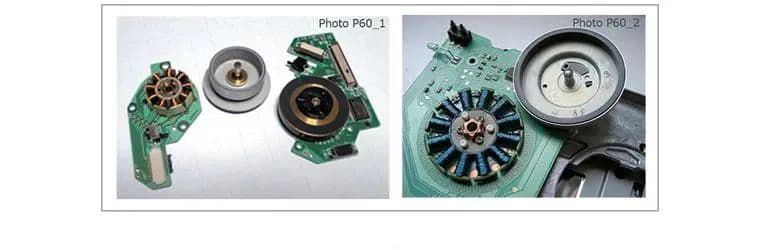
La imagen siguiente muestra un ejemplo del aspecto y la estructura del motor sin escobillas.
Ejemplo de aspecto y estructura de un motor sin escobillas
El lado izquierdo muestra un ejemplo del motor de husillo principal utilizado para girar el disco en el dispositivo de reproducción de discos, que contiene un total de nueve bobinas, tres fases por tres.
A la derecha se muestra un ejemplo del motor de husillo principal de un dispositivo DDF, con doce bobinas (tres fases por cuatro). Las bobinas están montadas en una placa de circuito y envueltas alrededor de un núcleo de hierro.
En el lado derecho de la bobina, el componente en forma de disco es un rotor de imán permanente. El perímetro es un imán permanente, el eje del rotor se inserta en el centro de la bobina y cubre parte de la bobina, con el imán permanente rodeando la periferia de la bobina.
Diagrama de estructura interna y circuito equivalente del motor trifásico sin escobillas de onda completa
A continuación se muestran el diagrama simplificado de la estructura interna y el diagrama del circuito equivalente de las conexiones de la bobina para un motor sin escobillas trifásico de onda completa.
Este esquema representa una estructura simple de un motor de 2 polos (2 imanes) y 3 ranuras (3 bobinas). Se asemeja a la estructura de un motor con escobillas con el mismo número de polos y ranuras, salvo que el lado de la bobina es fijo y los imanes giratorios. Naturalmente, este diseño no incorpora escobillas.
En esta configuración, las bobinas están conectadas en forma de "Y". Los componentes semiconductores suministran corriente a las bobinas, controlando la entrada y salida de corriente en función de la posición de los imanes giratorios.
En este ejemplo, se utiliza un elemento Hall para detectar la posición de los imanes. El elemento Hall se coloca entre las bobinas, donde detecta la tensión generada por la intensidad del campo magnético y la utiliza para obtener información posicional.
En la imagen facilitada anteriormente del motor de husillo FDD también se puede observar un elemento Hall (situado encima de las bobinas) que sirve para detectar la posición entre las bobinas.
El elemento Hall es un sensor magnético muy conocido. Puede convertir la magnitud de un campo magnético en una tensión, representando la dirección del campo con valores positivos o negativos. A continuación se muestra un diagrama que ilustra el efecto Hall.
El elemento Hall utiliza el fenómeno de que "cuando la corriente IH fluye a través del semiconductor y el flujo magnético B pasa en ángulo recto con la corriente, se genera una tensión VH en la dirección perpendicular a la corriente y al campo magnético".
Este fenómeno, conocido como "efecto Hall", fue descubierto por el físico estadounidense Edwin Herbert Hall. La tensión VH generada se representa mediante la siguiente fórmula.
VH=(KH/d)・IH・B
Donde KH es el coeficiente Hall, y d es el espesor de la superficie penetrante de flujo.
Como sugiere la fórmula, cuanto mayor es la corriente, mayor es la tensión. Esta característica suele utilizarse para detectar la posición del rotor (imán).
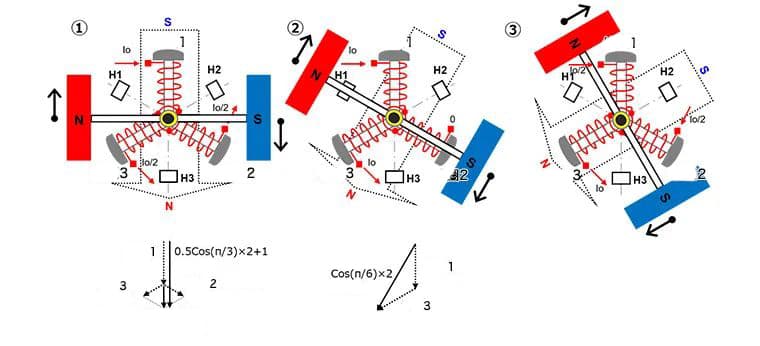
Principio de rotación del motor trifásico sin escobillas de onda completa
El principio de rotación del motor sin escobillas se explicará en los pasos ① a ⑥. Para facilitar la comprensión, el imán permanente se ha simplificado de un círculo a un rectángulo.
1) En un sistema trifásico de bobinas, imaginemos la bobina 1 fija en la posición de las 12 horas de un reloj, la bobina 2 en la posición de las 4 horas y la bobina 3 en la posición de las 8 horas. Supongamos un imán permanente de 2 polos con su polo norte a la izquierda y su polo sur a la derecha, capaz de girar.
La corriente Io se introduce en la bobina 1, generando un campo magnético polo Sur en el exterior de la bobina. La mitad de esta corriente, Io/2, sale por las bobinas 2 y 3, creando un campo magnético polo Norte en su exterior.
Cuando los campos magnéticos de las bobinas 2 y 3 sufren una síntesis vectorial, se genera un campo magnético de polo norte descendente. Este campo es la mitad del campo magnético producido cuando la corriente Io pasa por una bobina y, cuando se añade al campo de la bobina 1, se hace 1,5 veces mayor. Esto crea un campo magnético sintetizado en un ángulo de 90° con respecto al imán permanente, generando así el par máximo e impulsando la rotación del imán permanente en el sentido de las agujas del reloj.
Al disminuir la corriente en la bobina 2 y aumentar la de la bobina 3 en función de la posición de rotación, el campo magnético sintetizado también gira en el sentido de las agujas del reloj, continuando la rotación del imán permanente.
2) Con un giro de 30°, la corriente Io entra en la bobina 1, poniendo a cero la corriente en la bobina 2 y haciendo salir la corriente Io por la bobina 3.
El exterior de la bobina 1 se convierte en el polo S, y el exterior de la bobina 3 se convierte en el polo N. Durante la combinación vectorial, el campo magnético generado es √3 (aproximadamente 1,72) veces el de una sola bobina que transporte corriente Io. Esto también da lugar a un campo magnético compuesto en un ángulo de 90° con respecto al campo del imán permanente, que gira en el sentido de las agujas del reloj.
Cuando la corriente de entrada Io en la bobina 1 se reduce según la posición rotacional, la corriente de entrada en la bobina 2 empieza a aumentar desde cero, y la corriente de salida en la bobina 3 aumenta hasta Io, el campo magnético compuesto también gira en el sentido de las agujas del reloj, y el imán permanente sigue girando.
Suponiendo que todas las corrientes de fase sean sinusoidales, la corriente aquí es Io×sin(π⁄3)=Io×√3⁄2. Mediante la combinación vectorial del campo magnético, el tamaño total del campo magnético es 1,5 veces el campo producido por una sola bobina ((√3⁄2)2×2=1,5). Cuando todas las corrientes de fase son sinusoidales, independientemente de la posición del imán permanente, el tamaño del campo magnético compuesto vectorial es siempre 1,5 veces el de una bobina simple, y el campo magnético forma un ángulo de 90° con el campo magnético del imán permanente.
3) Tras una nueva rotación de 30°, la corriente Io/2 entra en la bobina 1, la corriente Io/2 entra en la bobina 2, y la corriente Io sale de la bobina 3.
El exterior de la bobina 1 se convierte en el polo S, el exterior de la bobina 2 también se convierte en el polo S y el exterior de la bobina 3 se convierte en el polo N. Durante la combinación vectorial, el campo magnético generado es 1,5 veces el campo magnético producido cuando la corriente Io pasa por una sola bobina (igual que en ①). Aquí también se forma un campo magnético compuesto en un ángulo de 90° con respecto al campo del imán permanente, que gira en el sentido de las agujas del reloj.
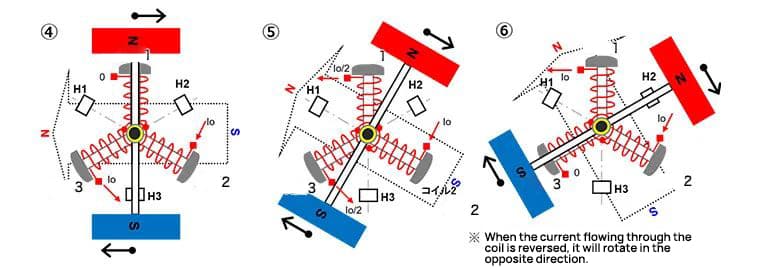
Pasos 4 a 6, girar de la misma manera que los pasos 1 a 3.
De este modo, conmutando secuencialmente la corriente que circula por la bobina en función de la posición del imán permanente, éste girará en un sentido fijo. Del mismo modo, si se invierte la corriente y el sentido del campo magnético sintético, girará en sentido contrario a las agujas del reloj.
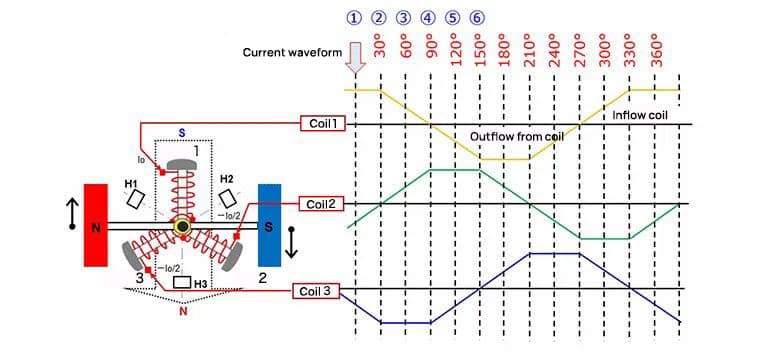
El siguiente diagrama muestra de forma continua la corriente de cada bobina en cada uno de los pasos 1 a 6 mencionados anteriormente. A partir de la introducción anterior, debe entenderse la relación entre los cambios en la corriente y la rotación.
Motor paso a paso
El motor paso a paso es un tipo de motor que puede sincronizarse con precisión con señales de impulsos para controlar los ángulos de rotación y la velocidad. También se conoce como "motor de impulsos".
El motor paso a paso, que no necesita sensor de posición y puede lograr un posicionamiento preciso mediante control en bucle abierto, se utiliza mucho en equipos que requieren una localización precisa.
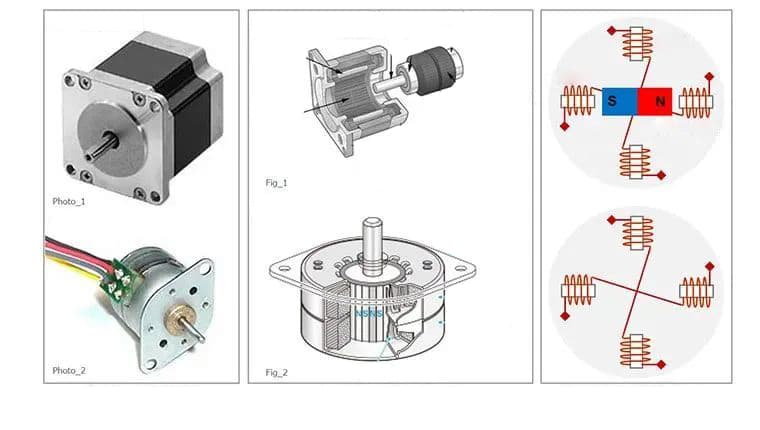
Estructura de un motor paso a paso (bifásico bipolar)
Las imágenes siguientes, de izquierda a derecha, muestran un ejemplo del aspecto externo de un motor paso a paso, un diagrama sencillo de su estructura interna y un esquema conceptual de su diseño.
Los ejemplos exteriores proporcionados son de motores paso a paso de tipo HB (híbrido) y PM (imán permanente). Los diagramas centrales también representan las estructuras de los tipos HB y PM.
Los motores paso a paso están estructurados con bobinas fijas y un imán giratorio. El diagrama conceptual del lado derecho de la estructura interna del motor paso a paso ilustra un ejemplo de motor PM que utiliza dos fases (dos conjuntos) de bobinas. En los ejemplos de estructura básica de los motores paso a paso, las bobinas están situadas externamente, y el imán permanente, internamente. Además de los bifásicos, también existen tipos con un mayor número de fases, como los trifásicos y los de cinco fases.
Algunos motores paso a paso tienen estructuras distintas, pero para explicar sus principios de funcionamiento, este artículo presenta la estructura básica de los motores paso a paso. A través de este artículo, se pretende comprender que los motores paso a paso adoptan principalmente una estructura con bobinas fijas y un imán permanente giratorio.
Principio básico de funcionamiento de los motores paso a paso (excitación monofásica)
El siguiente diagrama sirve para explicar el principio básico de funcionamiento de los motores paso a paso. Se trata de un ejemplo de excitación monofásica (un juego de bobinas) de las mencionadas bobinas bipolares bifásicas. La premisa del diagrama es el cambio de estado de ① a ④. Las bobinas están formadas por la Bobina 1 y la Bobina 2. Además, la flecha de la corriente representa la dirección del flujo de corriente.
①Dirija la corriente para que entre por el lado izquierdo de la bobina 1 y salga por el lado derecho. Evite cualquier flujo de corriente a través de la bobina 2. Como resultado, el lado interior de la bobina izquierda 1 se convierte en N (norte), mientras que el lado interior de la bobina derecha 1 se convierte en S (sur). En consecuencia, el imán permanente del centro es atraído por el campo magnético de la bobina 1, adoptando un estado con S a la izquierda y N a la derecha, y se detiene.
②A continuación, detenga la corriente en la bobina 1, dirigiéndola hacia dentro desde la parte superior de la bobina 2 y hacia fuera desde la parte inferior. El lado interno de la bobina superior 2 se convierte entonces en N, y el lado interno de la bobina inferior 2 se convierte en S. El imán permanente es atraído por este campo magnético, girando 90 grados en el sentido de las agujas del reloj y deteniéndose.
③A continuación, detenga la corriente en la bobina 2, dirigiéndola hacia dentro por el lado derecho de la bobina 1 y hacia fuera por el lado izquierdo. El lado interno de la bobina izquierda 1 se convierte en S, y el lado interno de la bobina derecha 1 se convierte en N. El imán permanente es atraído de nuevo por este campo, girando otros 90 grados en el sentido de las agujas del reloj y deteniéndose.
④Por último, detenga la corriente en la bobina 1, dirigiéndola para que fluya hacia dentro desde la parte inferior de la bobina 2 y hacia fuera desde la parte superior. El lado interior de la bobina superior 2 se convierte en S, mientras que el lado interior de la bobina inferior 2 se convierte en N. Una vez más, el imán permanente es atraído por este campo magnético, girando 90 grados en el sentido de las agujas del reloj y deteniéndose.
Al conmutar el flujo de corriente a través de las bobinas en la secuencia anterior (① a ④) mediante un circuito electrónico, se puede hacer girar el motor paso a paso. En este ejemplo, cada acción del interruptor hace girar el motor paso a paso 90 grados.
Además, mantener un flujo continuo de corriente a través de una bobina específica permite que el motor permanezca en estado de parada mientras mantiene el par. Como nota al margen, invertir el orden del flujo de corriente a través de las bobinas puede hacer que el motor paso a paso gire en sentido contrario.
Como fundador de MachineMFG, he dedicado más de una década de mi carrera a la industria metalúrgica. Mi amplia experiencia me ha permitido convertirme en un experto en los campos de la fabricación de chapa metálica, mecanizado, ingeniería mecánica y máquinas herramienta para metales. Estoy constantemente pensando, leyendo y escribiendo sobre estos temas, esforzándome constantemente por mantenerme a la vanguardia de mi campo. Deje que mis conocimientos y experiencia sean un activo para su empresa.
¿Se ha preguntado alguna vez qué hace que un motor eléctrico funcione sin sobrecalentarse? Conocer las temperaturas de funcionamiento seguras de los motores es crucial para su longevidad y rendimiento. En este artículo,...
¿Alguna vez se ha preguntado cómo los trenes pueden flotar sobre las vías o cómo los robots consiguen movimientos precisos? Este artículo desvela el fascinante mundo de los motores lineales, explicando sus principios, tipos y ventajas únicas....
¿Se ha preguntado alguna vez por qué a su motor eléctrico a veces le cuesta arrancar sin problemas? Las altas corrientes de arranque pueden causar un estrés significativo en su sistema eléctrico, provocando fallos potenciales e ineficiencias. Este artículo...
¿Cómo se determina el nivel máximo de vibración de los rodamientos de motores eléctricos? Esta pregunta crucial se refiere tanto a los límites operativos como a las pruebas posteriores a la instalación. El artículo explora las normas internacionales y nacionales...
Hace unos días, un ingeniero preguntó sobre la selección de lubricantes para rodamientos. Los fabricantes de lubricantes habían proporcionado una plétora de indicadores de rendimiento, pero los significados detrás de estos parámetros...
La elección de los rodamientos adecuados para motores verticales plantea retos únicos debido a las diferencias estructurales con respecto a los motores horizontales. El proceso de selección debe tener en cuenta las cargas axiales y radiales, los problemas de lubricación...
1. Distinción entre varilla de empuje eléctrica y cilindro eléctrico La varilla de empuje eléctrica y el cilindro eléctrico suelen denominarse actuadores eléctricos. Utilizan un motor eléctrico para accionar...
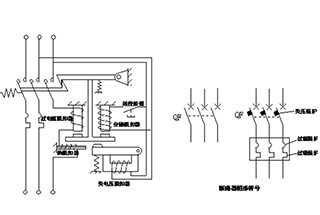
¿Se ha preguntado alguna vez qué hace que los sistemas eléctricos de su hogar sean seguros y fiables? Los aparatos eléctricos de baja tensión, como disyuntores y contactores, desempeñan un papel crucial para garantizarlo. Este artículo desmitifica los...
¿Se ha preguntado alguna vez qué diferencia a los motores de corriente continua de los de corriente alterna? En este artículo, exploramos las diferencias fundamentales entre estos dos tipos de motores, incluidos sus principios de funcionamiento,...