Guía completa de rodamientos lineales: Todo lo que necesita saber
¿Se ha preguntado alguna vez cuál es la clave de un movimiento suave y preciso en las máquinas? Los rodamientos lineales son los héroes anónimos de innumerables sistemas automatizados, ya que permiten transferir, manipular, posicionar y ensamblar sin esfuerzo. En esta entrada del blog, nos sumergiremos en el mundo de los rodamientos lineales, comparándolos con otros componentes de movimiento lineal y revelando sus ventajas únicas. Prepárese para descubrir cómo estas maravillas de la ingeniería pueden revolucionar sus diseños.
1. Rodamientos lineales y otros componentes de guiado de movimientos lineales
Los componentes de guiado de movimiento lineal son los más utilizados en los mecanismos de movimiento automatizados para transferencia, manipulación, posicionamiento y montaje.
Aquí compararemos los cojinetes lineales, las guías de deslizamiento y los casquillos sin aceite, y nos centraremos en el uso de los cojinetes lineales.
(1) Comparación de las características de los rodamientos lineales
En la tabla siguiente se resume una comparación aproximada de las características de los tres componentes de guiado de movimiento lineal.
A continuación se presenta la relación entre las características anteriores y la construcción.
(2) La correlación entre las características y la construcción de las piezas de guiado lineal.
1. Diferencias de rendimiento con respecto a la capacidad de carga:
Rodamientos lineales y casquillos autolubricantes.
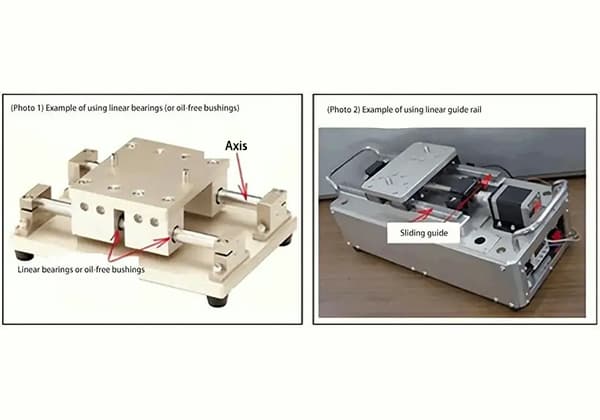
a) Los componentes móviles con rodamientos lineales o casquillos autolubricantes se montan generalmente sobre un eje (carril guía) soportado por estructuras de apoyo en ambos extremos para lograr su función de movimiento. Cuando soporta grandes cargas, el eje se deforma fácilmente (véase [foto 1]).
(Además, cuando se realiza un guiado lineal vertical, se puede utilizar una estructura simple que ignore el problema de la carga, ya que el eje no necesita soportar la carga del componente móvil).
Guías lineales
b) Los componentes móviles se desplazan sobre los raíles guía fijos montados en la base, que tiene excelentes características de soporte de carga (véase [foto 2]).
Rodamientos lineales y casquillos autolubricantes => Movimiento lineal sobre un eje (carril guía) fijado en ambos extremos => movimiento lineal con cargas ligeras a medias.
Guías lineales => Movimiento lineal sobre guías fijadas a la base => Movimiento lineal con cargas ligeras a pesadas.
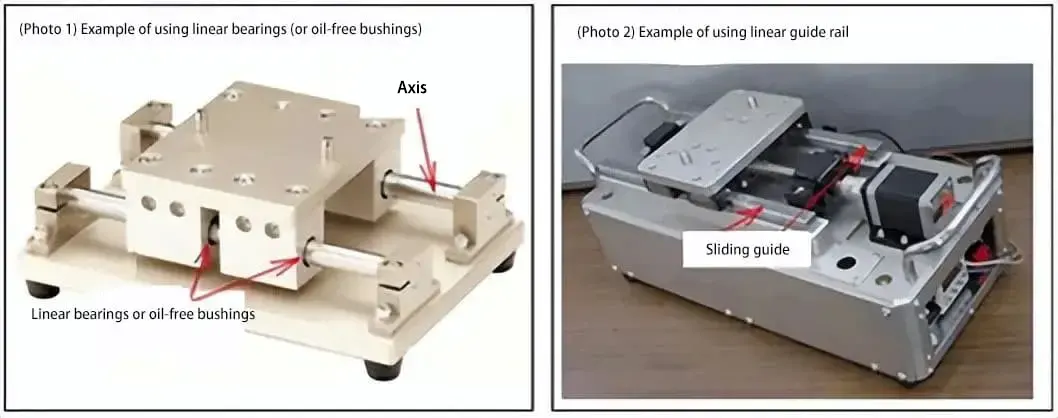
2. Diferencias de rendimiento con respecto al coeficiente de fricción:
En este caso, las diferencias en el método de deslizamiento guía (rodamiento o deslizamiento superficial) determinan las diferencias de rendimiento. La diferencia en el coeficiente de fricción está directamente relacionada con la selección del actuador de accionamiento.
a) Pequeña resistencia a la fricción = pequeña fuerza de fricción = puede ser accionado por un motor de par pequeño = el movimiento giratorio puede convertirse en movimiento lineal.
b) Gran resistencia al rozamiento = gran fuerza de rozamiento = requiere un gran par o accionamiento por empuje = puede ser accionado directamente por un cilindro lineal.
■ Precauciones de uso
El tamaño del coeficiente de fricción afecta a la capacidad del equipo de accionamiento y a la cantidad de calor generado durante el funcionamiento. Los casquillos autolubricantes no son adecuados para un funcionamiento continuo a alta velocidad con alta generación de calor.
Cuando se utiliza un cilindro, la velocidad inicial/de parada no puede controlarse como con un motor. El funcionamiento a alta velocidad y la supresión de vibraciones pueden lograrse instalando mecanismos de frenado flexibles, como amortiguadores y amortiguadores.
3. Diferencias de rendimiento con respecto a la precisión de la guía:
Básicamente, el rendimiento viene determinado por la holgura entre el rodamiento y el raíl guía.
a) En el caso de los rodamientos lineales, se utiliza un eje cilíndrico como carril guía, y la holgura entre el rodamiento y el carril guía se ajusta a "ajuste de interferencia: g6" o "ajuste de transición: h5", y el rodamiento se desliza en un estado de "holgura" mínima.
b) Para las guías lineales, se utilizan raíles guía dedicados, y se emparejan rodamientos de alta precisión y raíles guía de tipo de separación pequeña (0-3 μm) o de tipo presurizado (-3-0 μm).
c) En comparación con los rodamientos lineales, los casquillos autolubricantes tienen una mayor separación entre el raíl guía (eje), lo que se traduce en una menor precisión en el guiado.
■ Precauciones de uso
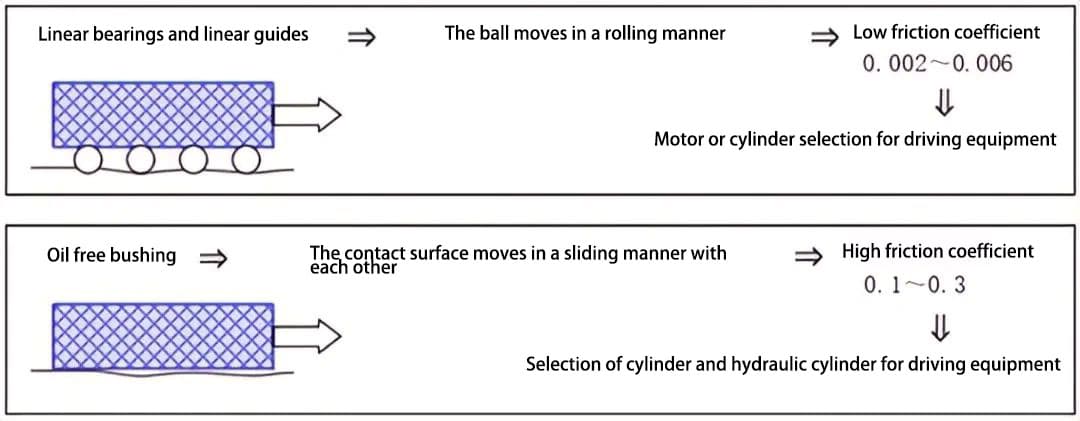
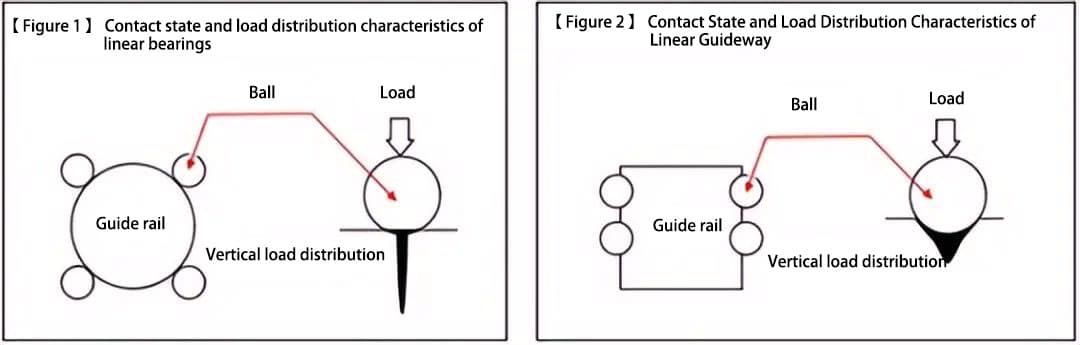
Los estados de contacto entre la bola y el raíl guía son diferentes para los rodamientos lineales y las guías lineales. Los rodamientos lineales tienen un estado de contacto puntual, en el que la parte de contacto soporta localmente una gran carga.
La parte de contacto entre el raíl guía y el rodamiento de bolas en las guías lineales adopta una forma de ranura, lo que permite que la bola esté en un estado de contacto superficial con la superficie del raíl guía y, por lo tanto, se dispersa la carga de contacto.
También existen diferencias en las características de capacidad de carga entre ambos con respecto al estado de contacto en la parte deslizante. ([Figura 1] y [Figura 2])
Rodamientos lineales => estado de contacto puntual => distribución desigual de la carga vertical => no apto para condiciones de carga elevada.
Guías lineales => estado de contacto superficial => distribución vertical dispersa de la carga => pueden soportar cargas relativamente elevadas.
4. Sobre la resistencia medioambiental y la facilidad de mantenimiento:
Esta diferencia de rendimiento viene determinada por las diferencias en los materiales constitutivos.
a) Los rodamientos lineales y las guías lineales pueden alcanzar una fiabilidad a largo plazo gracias al efecto del aceite lubricante (grasa), por lo que el entorno de trabajo no puede superar el índice de resistencia ambiental del aceite lubricante.
b) Los casquillos autolubricantes se utilizan generalmente en entornos en los que no hay aceite lubricantey tienen buena resistencia medioambiental y facilidad de mantenimiento.
2. Distinción entre tipos lineales y con bridas
A continuación, explicamos las diferencias en las formas externas de los rodamientos lineales (de tipo lineal y de tipo embridado) y las precauciones que deben tomarse durante el montaje.
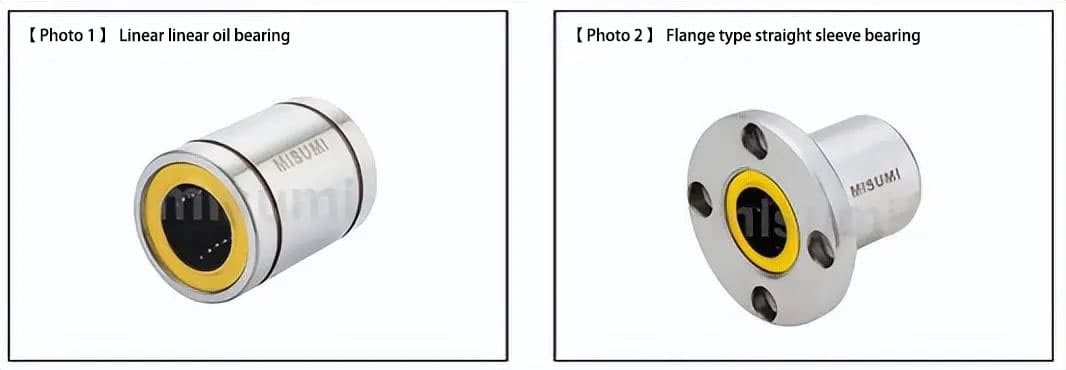
(1) Rodamientos lineales de tipo lineal y de brida
La [Foto 1] muestra el tipo lineal, y la [Foto 2] muestra el tipo embridado.
El rodamiento lineal tipo brida [Foto 2] tiene las siguientes ventajas:
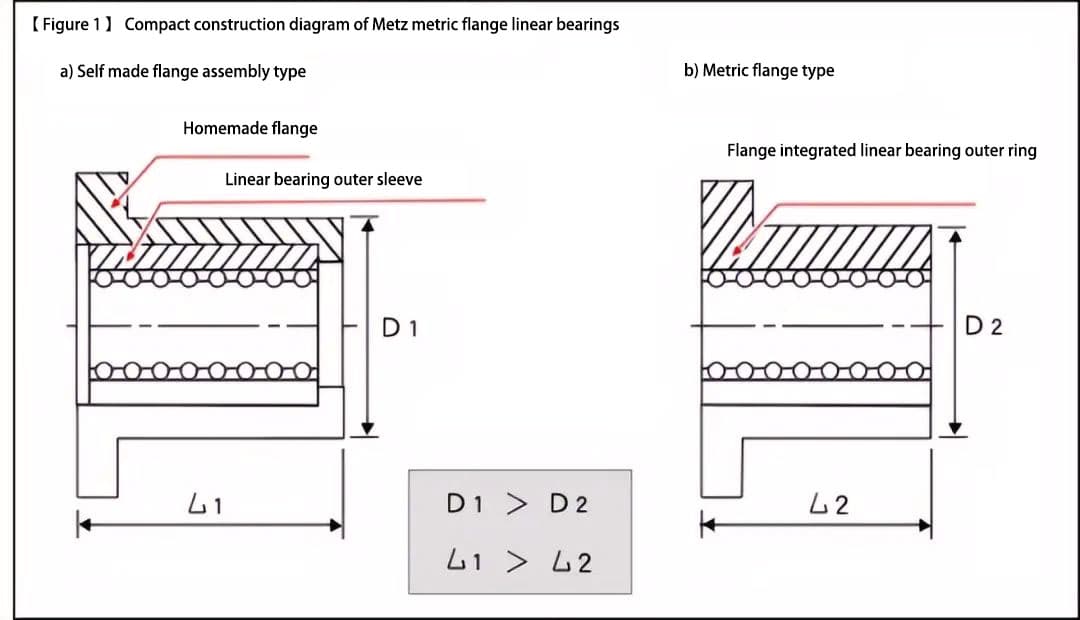
Tiene una estructura más compacta al adoptar una construcción integrada de un rodamiento lineal y un manguito de eje con brida ([Figura 1]).
En comparación con un rodamiento lineal combinado con una brida fabricada por separado, presenta ventajas como el bajo coste, el corto plazo de entrega y la calidad estable.
La [Figura 1] es un diagrama esquemático que explica la estructura compacta del rodamiento lineal con brida. La estructura de montaje del rodamiento lineal con brida y la forma del casquillo del eje son demasiado largas, mientras que el rodamiento lineal con brida adopta una estructura integrada, que es más compacta. Este diseño compacto permite mantener el rendimiento de carga.
(2) Distinción entre tipos lineales y tipos de brida
Elija lineal o brida tipos de rodamientos según los siguientes criterios: Seleccione rodamientos lineales con brida si son portantes.
Elija en función del espacio circundante y de las superficies de construcción alrededor de la instalación de los rodamientos lineales. Consulte el punto (3) para conocer los métodos de instalación y las precauciones relativas a los rodamientos lineales.
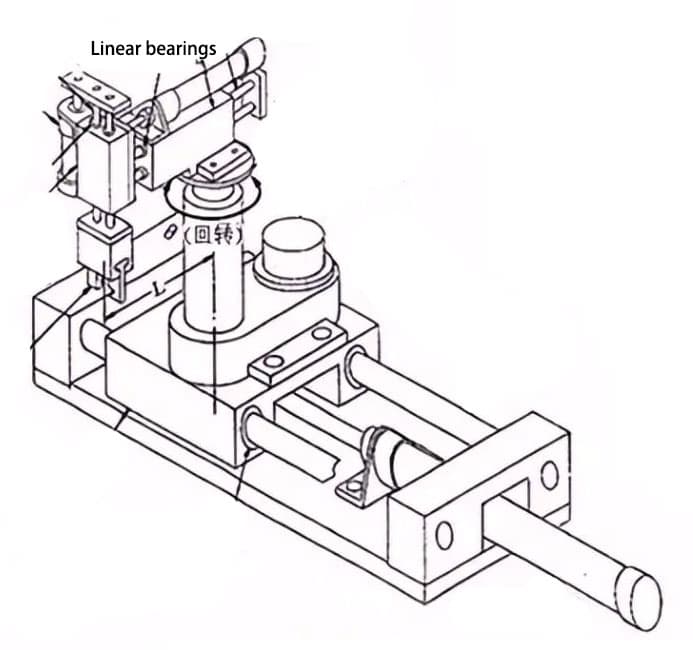
Los rodamientos lineales se dividen en automotrices y de eje fijo para la rotación del eje. La figura 2 ilustra la construcción de una plataforma accionada X-Y-Z-θ con el eje como eje guía. Los rodamientos se clasifican según corresponda.
a) Eje X: Los rodamientos lineales son automotrices y de tipo brida.
b) Eje Y: Los rodamientos lineales son fijos (en la dirección del eje Θ) y permiten el movimiento en la dirección del eje A.
c) Eje Z: Los rodamientos lineales se fijan en la dirección del eje Z y permiten el movimiento en la dirección del eje Y.
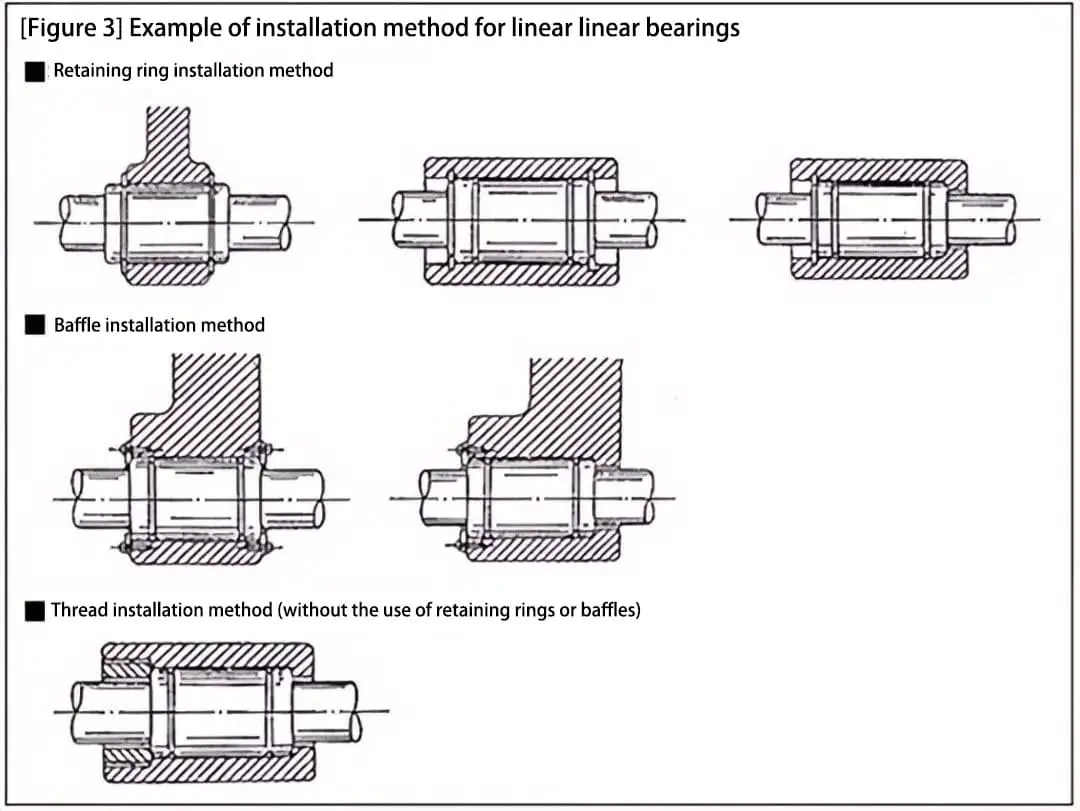
Para los tipos lineales, seleccione los métodos de fijación de anillo elástico o placa de tope en función de la resistencia deseada de la fijación.
a) La parte móvil del eje X de la sección está sometida a la fuerza de inercia del peso de la parte móvil soportada por el rodamiento lineal. El rodamiento lineal debe fijarse firmemente.
b) El rodamiento lineal está fijado al asiento del rodamiento, y debido al uso de un cilindro para accionar la estructura del eje, la fijación axial del rodamiento lineal sólo soporta la fuerza de reacción de la fricción, por lo que se adoptó un diseño compacto para el tipo lineal. Además, los rodamientos lineales del eje Y están fijados en dirección opuesta a los dos ejes relativos al eje de rotación de la plataforma accionada θ, lo que permite una gran rigidez en relación con el par de rotación.
c) Si se considera desde la dirección del eje móvil, es igual que b) y no soportará grandes fuerzas.
(3) Métodos de instalación y precauciones para rodamientos lineales.
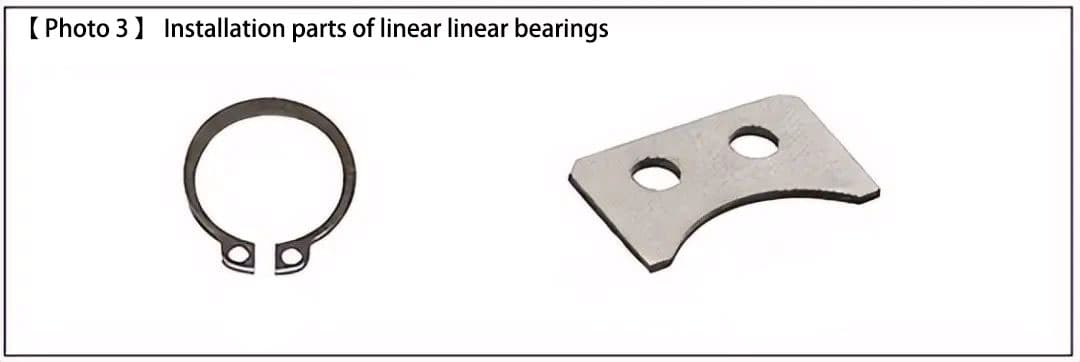
(1) Métodos de instalación de los rodamientos lineales
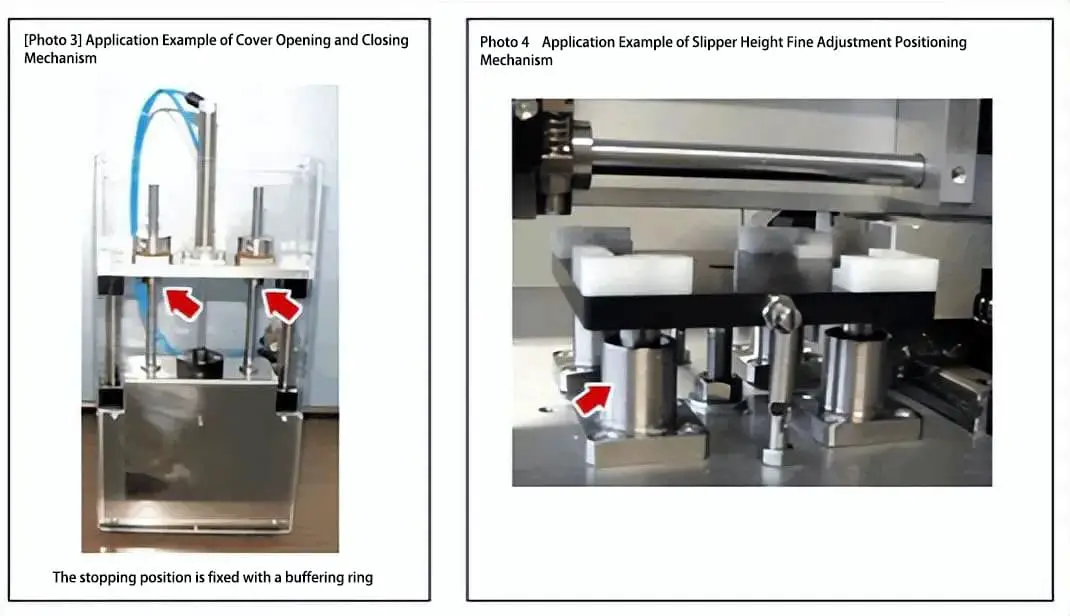
Los rodamientos lineales se instalan generalmente mediante anillos elásticos o placas de tope (ver [Foto 3] y [Figura 3]).
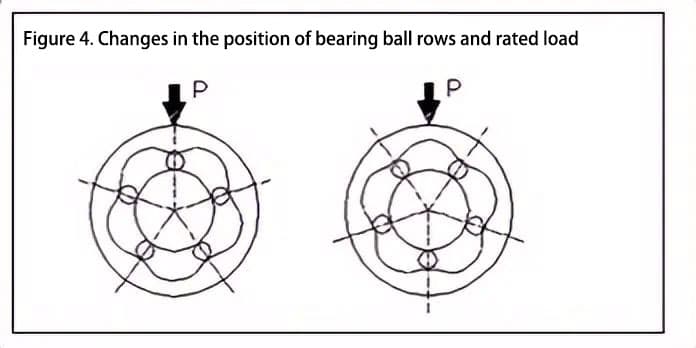
(2) Precauciones para el ángulo de instalación de los rodamientos lineales
Debido a las diferencias en el diámetro y el tipo de eje, así como en el número de hileras de bolas del rodamiento, los rodamientos lineales suelen tener de 4 a 6 hileras de bolas dispuestas en ángulos iguales. Cuando utilice rodamientos lineales en posición horizontal, evite instalarlos con las hileras de bolas en la posición directamente superior (como se muestra en el lado izquierdo de la [figura 4]), ya que esto puede dar lugar a cargas concentradas.
La [figura 4] muestra un rodamiento de bolas de 5 hileras, y la relación de los valores de carga nominal se muestran a continuación (lado derecho ÷ lado izquierdo). Por lo tanto, la instalación debe realizarse lo más cerca posible del ángulo de instalación que se muestra en el diagrama anterior.
Carga estática nominal (lado derecho ÷ lado izquierdo) = 1,46
Carga dinámica nominal (lado derecho ÷ lado izquierdo) = 1,19
3. Diferenciación de los rodamientos de revestimiento simple, de doble revestimiento, extendidos y con tratamiento superficial.
(1) Longitud del rodamiento y rendimiento de guiado
Los rodamientos lineales pueden dividirse en cuatro tipos en función de su longitud:
[1] de una sola línea
[2] doble forro
[3] ampliado
[4] diseñado por el cliente (utilizando dos tipos de una sola línea).
La diferencia en la longitud del cojinete afecta directamente al rendimiento de guiado de la siguiente manera:
a) Capacidad de carga
b) Precisión de guiado
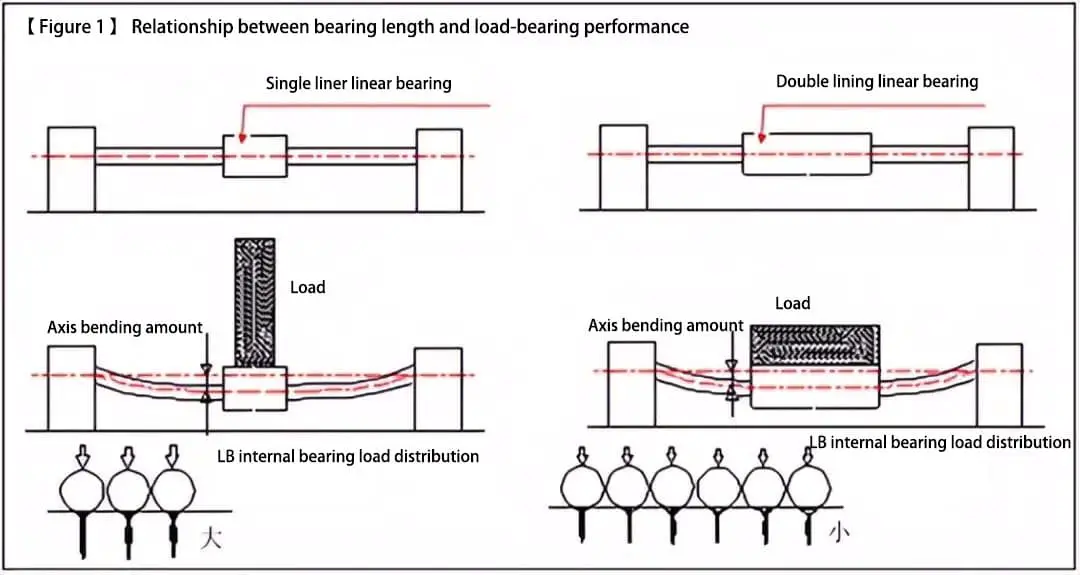
a) Relación entre la longitud del cojinete y la capacidad de carga
Cuanto más largo es el rodamiento, más puntos de apoyo hay y menor es la carga necesaria para cada punto de contacto del rodamiento. Esta conclusión puede extraerse de la situación real, en la que la carga nominal de los tres tipos [1], [2] y [3] de rodamientos lineales aumenta secuencialmente con su longitud.
Por lo tanto, la elección de una mayor longitud de rodamiento lineal puede mejorar la capacidad de carga del producto (= aumento de la vida útil y la fiabilidad) ([Figura 1]).
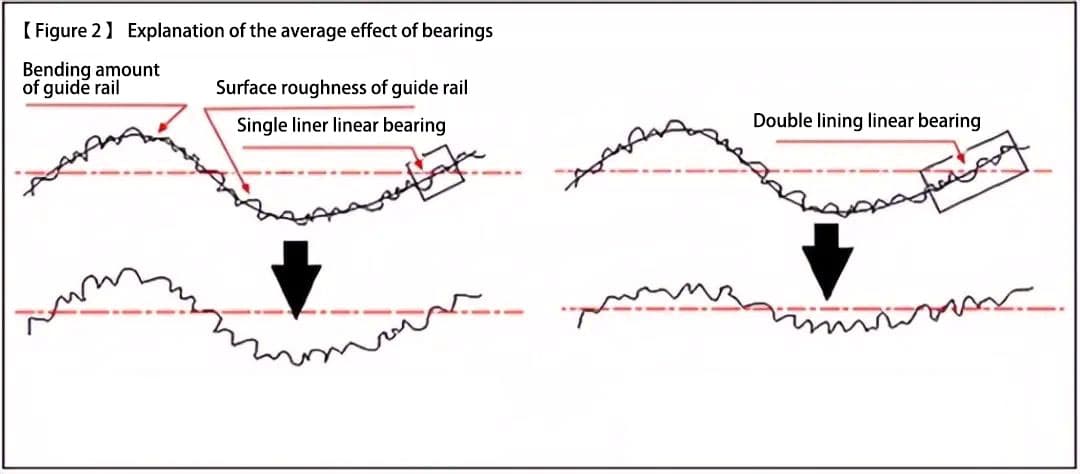
b) Relación entre la longitud del rodamiento y la precisión de guiado
Cuanto mayor sea la longitud del rodamiento, mayor será la precisión de guiado.
1)
Al promediar el error de guiado del raíl guía (eje), se puede mejorar la precisión del producto (consulte la nota correspondiente para más detalles) ([Figura 2]).
2)
La precisión del producto puede mejorarse reduciendo el error de holgura entre el raíl guía (eje) ([Figura 3]).
El efecto de promediación de los apoyos: Al aumentar la longitud del cojinete de la guía lineal, se incrementa el número de apoyos del cojinete, y se pueden promediar los factores de error en la superficie de la guía (rugosidad de la superficie y deformación por flexión), suprimiéndose el efecto del factor de error a menos de la mitad.
Por lo tanto, al aumentar la longitud del cojinete, se puede mejorar la capacidad de carga y la precisión de guiado.
Por lo tanto, el tipo [4] (que utiliza un diseño dedicado con dos tipos de revestimiento simple) de rodamiento lineal se utiliza a menudo en entornos de trabajo de alta precisión hasta cierto punto ([Figura 4]).
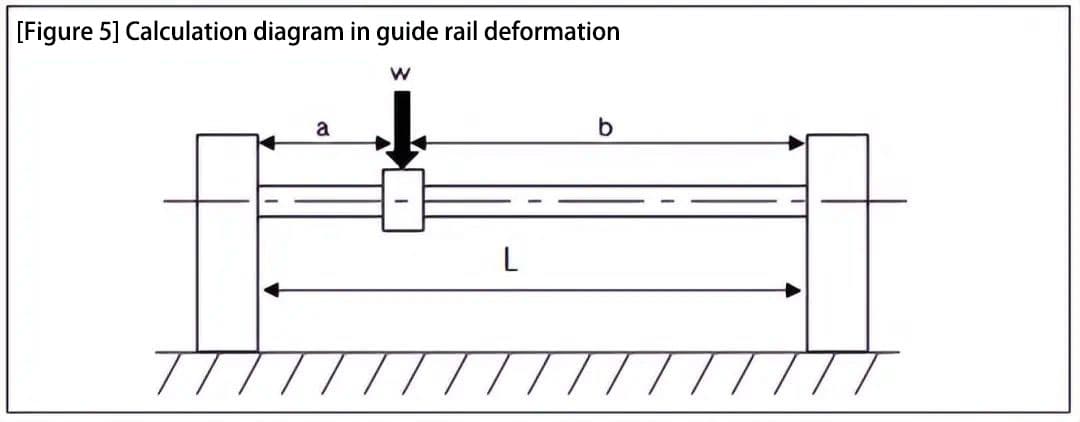
(2) Cálculo de la deformación del raíl guía (eje) ([Figura 5])
En un mecanismo lineal compuesto por un rodamiento lineal y un eje, la deformación del eje puede calcularse mediante la siguiente ecuación:
δ = (W * a3 * b3) / (3 * E * I * L3)
donde:
a: Distancia desde el extremo de apoyo hasta la posición de carga
b: Distancia desde el punto extremo de apoyo en el lado opuesto de a hasta la posición de carga.
L: Distancia entre los soportes del eje
E: Módulo de Young
I: Segundo momento del área de la sección transversal
I = πd4/64 ≈ 0.05d4
d: Diámetro del eje
W: Carga soportada por el rodamiento lineal (unidad: N)
Cuando a = b = L/2, δ = W * L3 / (9,6 * E * d4).
Por lo tanto, si desea reducir la deformación del eje, debe adoptar un enfoque de diseño que aumente el diámetro del eje (4 veces el efecto) o acorte la distancia entre los soportes del eje (3 veces el efecto).
(3) Características y ejemplos de aplicación de los materiales componentes y del tratamiento de superficie
Los materiales constitutivos, tratamientos superficialesy ejemplos de aplicación de los apoyos lineales:
Material del anillo exterior
Tratamiento de superficies
Material del retenedor
Material de la bola
Ejemplos de aplicación:
SUJ2
–
Equivalente a Resina/SUS440C
SUJ2
Guía deslizante con requisitos generales de resistencia al desgaste.
Movimiento de precisión para componentes ópticos sin reflejos en un entorno sin polvo.
SUJ2
Química Ni-P
Igual que el anterior.
Igual que el anterior.
Piezas deslizantes resistentes a productos químicos en entornos sin polvo que requieren resistencia al desgaste.
Equivalente a SUS440
–
Igual que el anterior.
Igual que el anterior.
Carga ligera en entornos sin polvo y equipos utilizados en los ámbitos alimentario y médico.
Características comparativas de los tratamientos superficiales.
Material del anillo exterior:
Tratamiento de superficies
Características:
SUJ2
–
El SUJ2 es de hierro y tiende a oxidarse.
Igual que el anterior.
Cromo negro de baja temperatura
Bajo coeficiente de fricción y buena resistencia al desgasteCapaz de formar un revestimiento uniforme y fino de color negro que no refleja la luz y presenta una buena absorción del calor.
Igual que el anterior.
Revestimiento químico de Ni-P
Excelente resistencia a los agentes químicos y a la corrosión, a menudo utilizado en salas blancasRevestimiento duro con un acabado brillante y no magnético.
4. Ejemplo de aplicación de rodamientos lineales en equipos automáticos sencillos
A continuación se describen las características de los rodamientos lineales:
Cojinetes de guiado sencillos, de bajo coste y rendimiento medio. (Alta relación coste-beneficio)
Bajo coeficiente de fricción, lo que facilita la selección del accionamiento. (Cilindro de bajo coste o tipo de motor de precio medio).
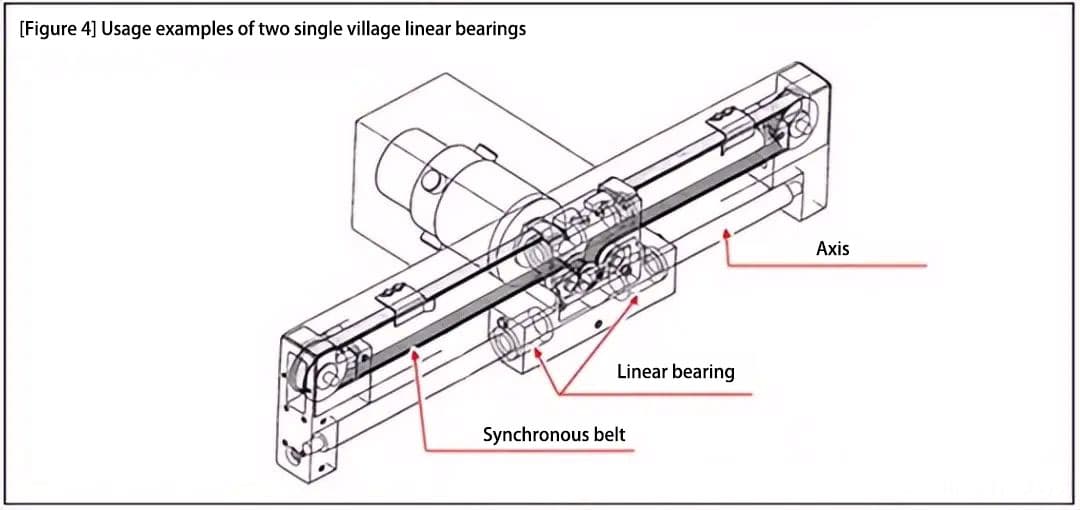
Combinándolo con un correa síncronase puede lograr un diseño de construcción de conducción silenciosa y ligera.
En el caso de la guía direccional vertical, el uso del método de conducción por el centro de gravedad permite un diseño de construcción sencillo y compacto.
El uso y las características de los rodamientos lineales se explican a continuación mediante un ejemplo de su aplicación en equipos automatizados sencillos.
(1) Motor paso a paso y transmisión por correa síncrona
La construcción de transmisión por correa síncrona presenta ventajas como el silencio, la ligereza, el bajo coste y la no necesidad de engrase. Para la situación de mesa de trabajo con ejes X/Y/Z, el concepto de diseño habitual consiste en reducir la carga del motor del eje X inferior aligerando el eje Y superior.
Por lo tanto, el eje Y se construye a menudo utilizando una correa síncrona.
a) [Figura 1] muestra un mecanismo de accionamiento de 3 ejes X/Y/Z típico.
El eje X está formado por guías lineales, mientras que el eje Y y el eje Z están construidos con rodamientos lineales. El sistema de accionamiento utiliza correas síncronas y husillos de bolas.
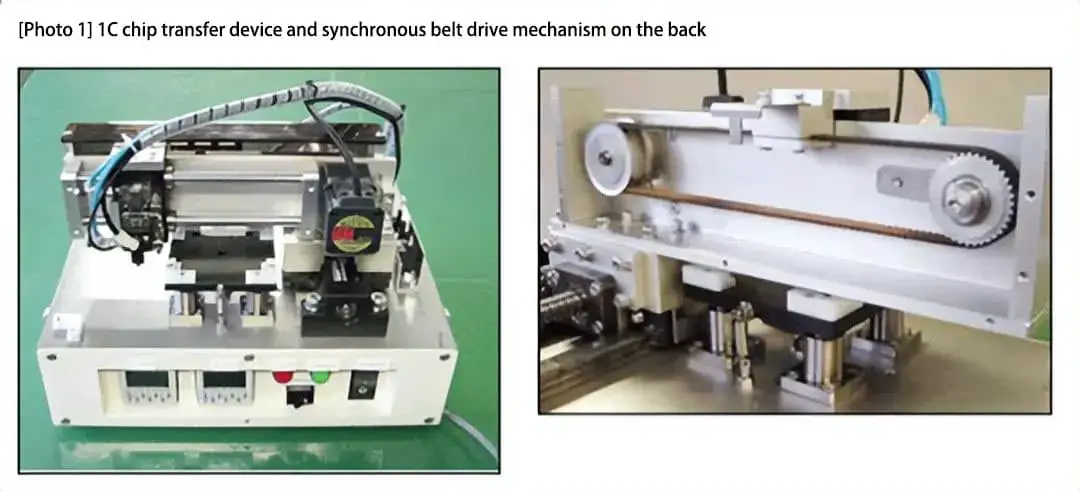
b) [Foto 1] muestra un ejemplo de aplicación del eje Y en un dispositivo de montaje de chips IC. La dirección del eje Y se convierte en movimiento alternativo mediante una correa síncrona.
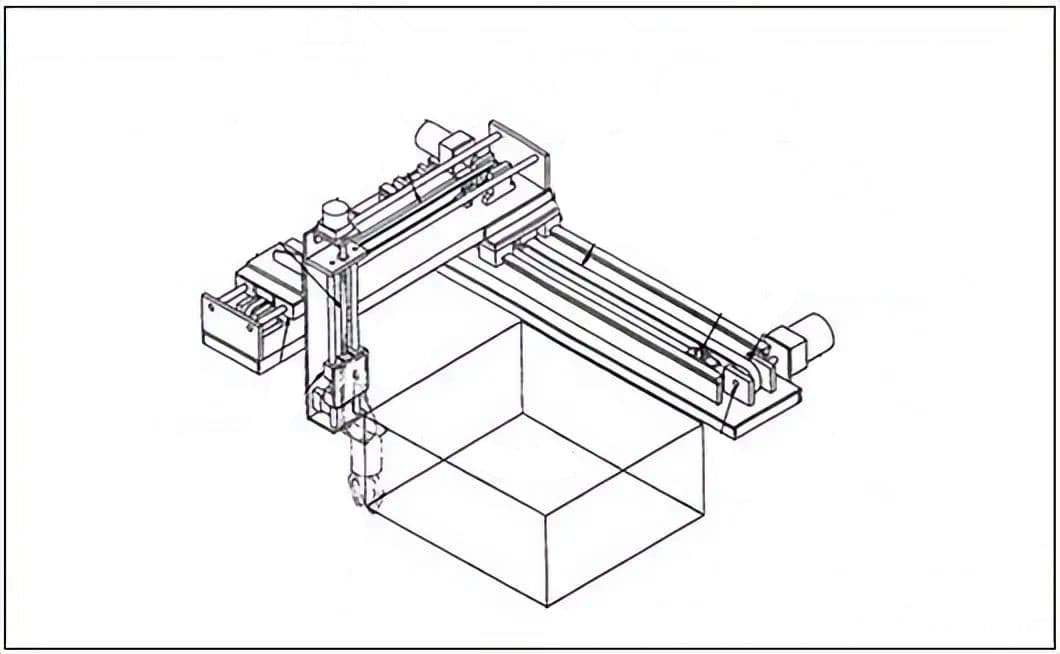
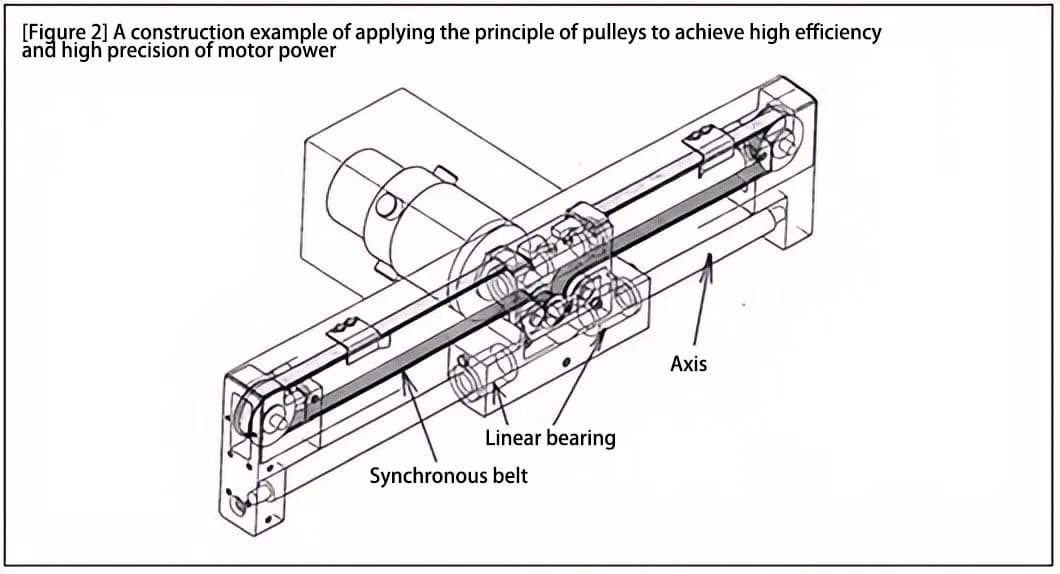
c) [Figura 2] muestra un ejemplo de aplicación de un robot de un eje con las siguientes características:
Se utilizan dos rodamientos lineales de gran luz para mejorar la capacidad de carga y la precisión de guiado.
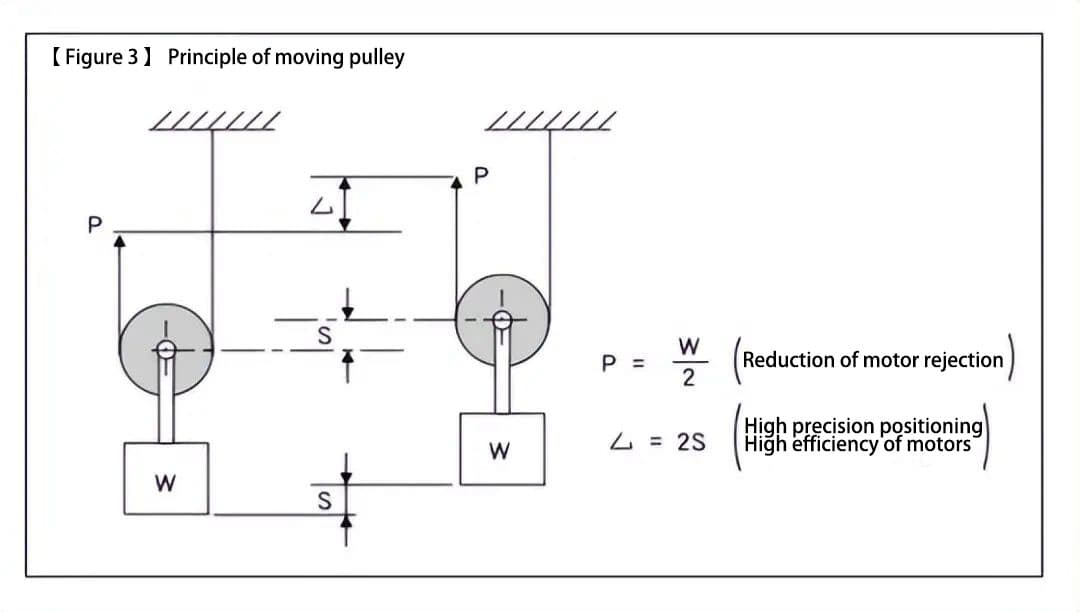
El diseño y la estructura de la correa síncrona y la polea utilizan un principio de polea rodante ([Figura 3]) para lograr una alta eficiencia de la potencia del motor y un posicionamiento de alta precisión.
La correa síncrona y el eje están dispuestos en paralelo arriba y abajo, e incluso con una estructura de un solo eje, la rotación relativa entre el eje y el rodamiento lineal puede ser restringida.
Principio de la polea móvil:
Para elevar el objeto de elevación de la figura 3 una distancia S, es necesario mover el bloqueador de cuerda el doble de la altura, pero la fuerza necesaria es sólo la mitad del peso del objeto de elevación, que puede elevarse fácilmente.
2 veces la distancia de desplazamiento
Precisión de posicionamiento que puede mejorar la resolución mínima de rotación del motor. Reducir a la mitad el error de retroceso y ralentí de la polea Alta velocidad de rotación (2x) del motor, lo que se traduce en una alta eficiencia del motor
1/2 veces la carga
Puede ser accionado por un motor de baja potencia (sin necesidad de engranajes reductores, etc.)
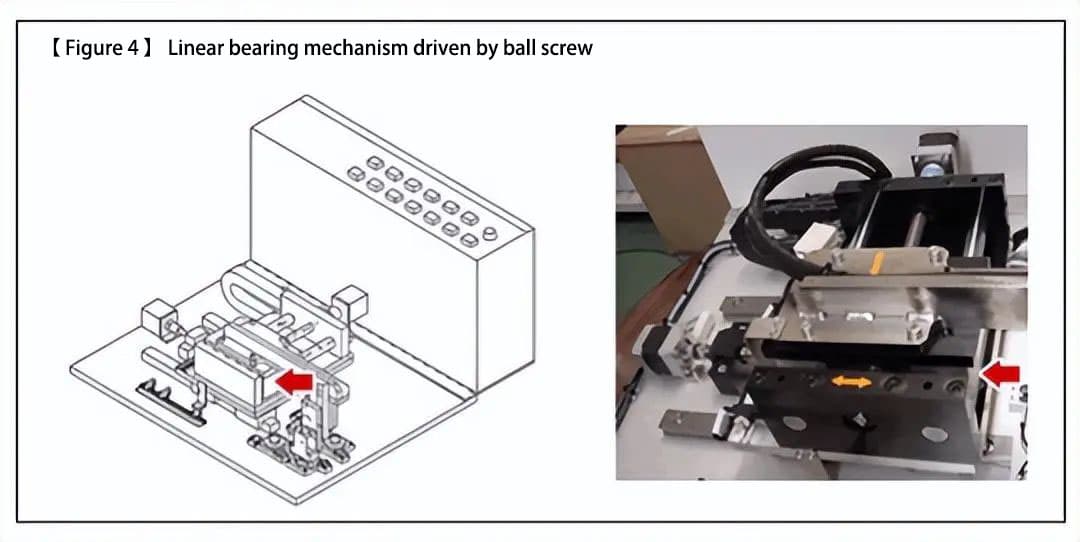
(2) Accionamiento por motor paso a paso y husillo de bolas
El método de accionamiento del husillo de bolas tiene las siguientes características: [1] convierte directamente el movimiento giratorio del motor en movimiento lineal, y [2] el paso del husillo de bolas tiene una función de reductor. La eficiencia de transmisión de la fuerza motriz y la eficiencia del motor son relativamente altas.
La [figura 4] es un mecanismo de accionamiento en el que el eje Y utiliza un rodamiento lineal y un husillo de bolas. Suele aplicarse a mecanismos que requieren avance unitario o tienen requisitos de precisión de posicionamiento.
Información adicional:
a) Características de un motor paso a paso
Los motores paso a paso tienen la característica de producir un par elevado en el rango de baja velocidad (generalmente en el arranque y la deceleración), lo que los hace adecuados para movimientos de corta distancia y control de posicionamiento multipunto.
b) Precisión necesaria del motor para lograr la precisión de posicionamiento deseada
Precisión de posicionamiento objetivo = ±0,01 (mm). Al seleccionar un avance de husillo de bolas de 10 (mm/rev), la precisión necesaria (divisiones) del motor paso a paso se puede calcular mediante la siguiente fórmula.
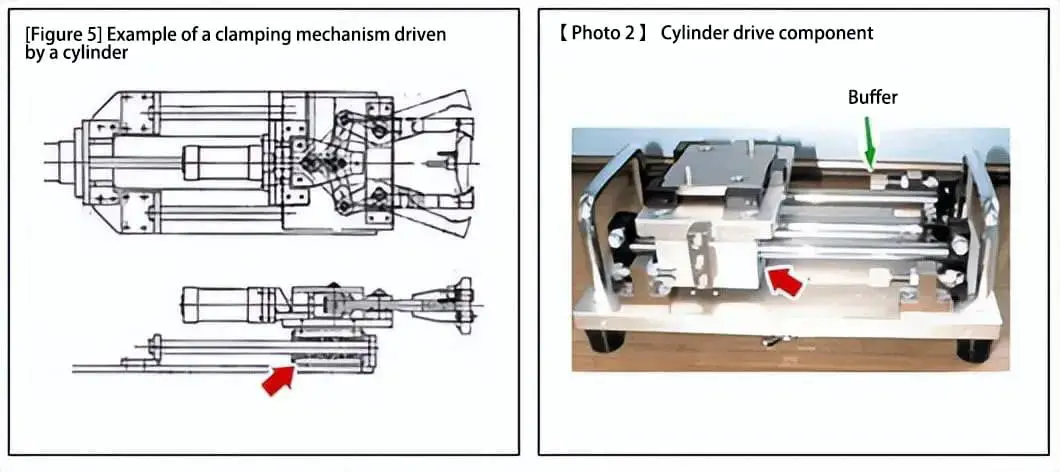
(3) Accionamiento del cilindro
La [Foto 5] es un ejemplo de rodamiento utilizado para el accionamiento de un cilindro en un mecanismo de pinza, mientras que la [Foto 2] es un ejemplo de mecanismo de accionamiento de un cilindro que utiliza un acoplamiento magnético. Ambos utilizan rodamientos lineales (indicados por las flechas) para el guiado.
No es posible controlar la velocidad de arranque y parada con un accionamiento por cilindro, por lo que debe utilizarse un amortiguador para reducir el impacto al detenerse (como se muestra en la [Foto 2]).
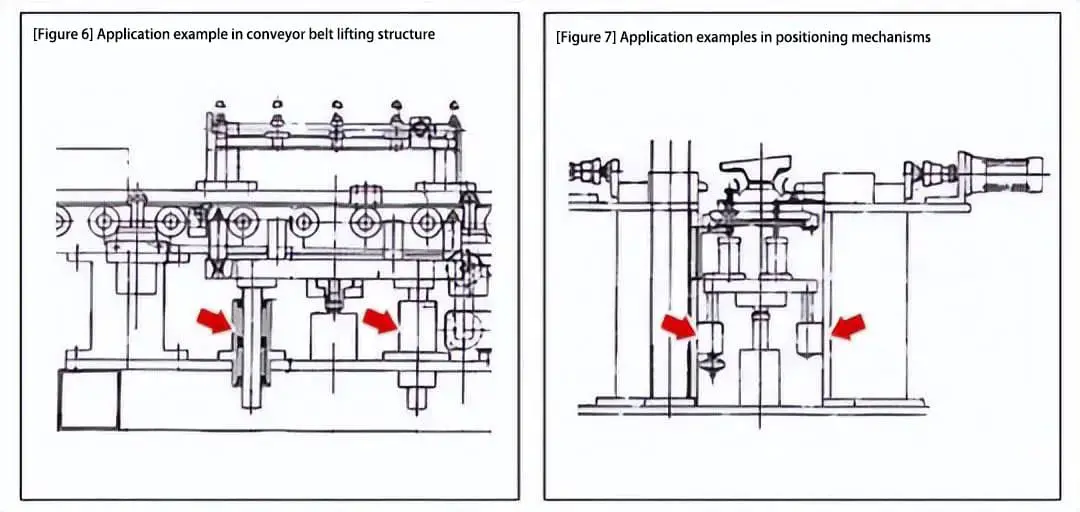
(4) Ejemplos de orientación vertical
La guía vertical puede conseguirse utilizando rodamientos lineales con bridas. No es necesaria una estructura de soporte específica para asegurar la instalación de los rodamientos lineales, lo que permite un diseño estructural sencillo y compacto (en el caso de las guías deslizantes, en las que debe establecerse un sustrato de montaje vertical para el carril guía fijo).
De forma similar a la estructura de la [Foto 4], la guía de elevación (mostrada en la [Figura 6]) y el mecanismo de posicionamiento (mostrado en la [Figura 7]) de la parte inferior de la cinta transportadora también utilizan rodamientos lineales embridados.
Como fundador de MachineMFG, he dedicado más de una década de mi carrera a la industria metalúrgica. Mi amplia experiencia me ha permitido convertirme en un experto en los campos de la fabricación de chapa metálica, mecanizado, ingeniería mecánica y máquinas herramienta para metales. Estoy constantemente pensando, leyendo y escribiendo sobre estos temas, esforzándome constantemente por mantenerme a la vanguardia de mi campo. Deje que mis conocimientos y experiencia sean un activo para su empresa.
Imagine desbloquear la precisión de las máquinas herramienta con una simple superficie de cristal. Las escalas de rejilla lineal hacen precisamente eso, transformar líneas finas en mediciones de gran precisión. Este artículo explora cómo estas...
¿Alguna vez se ha preguntado cómo se suavizan los bordes afilados de las piezas metálicas? Este proceso, conocido como biselado, transforma las esquinas peligrosas y dentadas en superficies angulosas más seguras. En este artículo...
¿Alguna vez se ha preguntado qué marcas de rodamientos son las mejores del mundo? En esta entrada del blog, exploraremos los principales fabricantes de rodamientos conocidos por su excepcional calidad, innovación y...
¿Se ha preguntado alguna vez quién mueve el mundo entre bastidores? En esta entrada del blog, nos adentraremos en los principales fabricantes de generadores que mantienen la luz encendida...
¿Es usted un aspirante a ingeniero mecánico que busca sobresalir en su campo? En esta entrada del blog, exploraremos los 10 programas de diseño de ingeniería mecánica más...
¿Alguna vez se ha preguntado cómo se garantiza la integridad de las tuercas y tornillos soldados de su coche? Este artículo revela el meticuloso proceso de comprobaciones e inspecciones de calidad que mantienen su vehículo...
¿Se ha preguntado alguna vez qué hace que un motor eléctrico funcione sin sobrecalentarse? Conocer las temperaturas de funcionamiento seguras de los motores es crucial para su longevidad y rendimiento. En este artículo,...
¿Alguna vez se ha preguntado por el fascinante mundo de la fundición? Este antiguo proceso de fabricación, en constante evolución, da forma a nuestra vida cotidiana de innumerables maneras. En esta entrada del blog, exploraremos la...
¿Alguna vez se ha preguntado cómo funcionan los engranajes de su coche o su avión? Este artículo desvela los principales fabricantes de engranajes que están dando forma al futuro de la ingeniería mecánica. Aprenderá...