Exploración de los tipos y principios de motores en la fabricación
Imagine el mundo sin el zumbido de los motores: sin coches, sin electrodomésticos, sin máquinas industriales. Los motores convierten la energía eléctrica en energía mecánica y hacen funcionar desde juguetes hasta gigantes de la industria. En este artículo exploraremos varios tipos de motores, sus principios de funcionamiento y sus aplicaciones. Al comprender estos fundamentos, comprenderá mejor cómo estos dispositivos indispensables conforman nuestra vida moderna y las innovaciones que impulsan en el panorama industrial.
Casi la mitad del consumo mundial de energía se atribuye a los motores, por lo que su uso eficiente es una de las medidas más eficaces para resolver los problemas energéticos mundiales.
Un motor es un dispositivo que convierte la energía eléctrica en energía mecánica. Utiliza una bobina alimentada (el bobinado del estator) para generar un campo magnético giratorio, que actúa sobre el rotor (como un bastidor de aluminio cerrado de jaula de ardilla) para crear un par magnético giratorio.
Los motores se dividen en motores de corriente continua (CC) y motores de corriente alterna (CA) en función del tipo de fuente de alimentación utilizada. La mayoría de los motores del sistema eléctrico son motores de CA, que pueden ser síncronos o asíncronos (la velocidad de rotación del campo magnético del estator del motor no está sincronizada con la velocidad de rotación del rotor).
Un motor consta principalmente de un estator y un rotor. La dirección del movimiento del conductor alimentado en el campo magnético está relacionada con la dirección de la corriente y la dirección de las líneas del campo magnético. El principio de funcionamiento de un motor es la fuerza del campo magnético sobre la corriente, que hace girar el motor.
El control del motor se refiere al control del arranque, la aceleración, el funcionamiento, la deceleración y la parada del motor. Existen diferentes requisitos y objetivos en función del tipo de motor y de las circunstancias en las que se utiliza. En el caso de los motores, mediante el control del motor se consiguen los objetivos de arranque rápido, respuesta rápida, alto rendimiento, alto par de salida y alta capacidad de sobrecarga.
Los motores estándar, servomotores, motores paso a paso y servomotores mencionados aquí se refieren a micromotores de corriente continua, con los que nos encontramos a menudo. Un motor, también conocido como "motor", se refiere a este dispositivo de inducción electromagnética que mantiene la transformación o transmisión de energía electromagnética según la ley de Faraday de inducción electromagnética.
Un motor, también conocido como "máquina eléctrica", está representado en el circuito de potencia por la letra inglesa "M" (antes representada por "D"). Su función principal es generar par motor como fuente de energía para aparatos eléctricos o máquinas diversas. Un generador se representa en el circuito por la letra "G".
1. Tipos de motores
En general, los motores son dispositivos que convierten la fuerza generada por el flujo de corriente eléctrica en un campo magnético en movimiento de rotación y, en un sentido más amplio, también en movimiento lineal.
Los motores pueden clasificarse en dos categorías en función de su fuente de alimentación: Motores de corriente continua y motores de corriente alterna.
También pueden clasificarse a grandes rasgos en función de sus principios de rotación, con algunas excepciones para tipos especiales de motores.
(1) Motor CC
Motor cepillado
El motor de escobillas, ampliamente utilizado, suele denominarse motor de corriente continua. El rotor gira conmutando la corriente a través de unos electrodos llamados "escobillas" (en el lado del estator) y un "conmutador" (en el lado del inducido).
Motor de corriente continua sin escobillas
Este motor no necesita escobillas ni conmutador, sino que utiliza funciones de conmutación como los transistores para conmutar las corrientes y hacer girar el motor.
Motor paso a paso
Este motor funciona de forma sincronizada con la potencia de impulsos, por lo que también se denomina motor de impulsos. Se caracteriza por un posicionamiento fácil y preciso.
(2) Motor de CA
Motor asíncrono
La corriente alterna hace que el estator produzca un campo magnético giratorio, que hace que el rotor produzca una corriente inducida y gire bajo su interacción.
Motor síncrono
La corriente alterna crea un campo magnético giratorio, y el rotor con el campo magnético gira por atracción. La velocidad de rotación se sincroniza con la frecuencia de alimentación.
Acerca de la corriente eléctrica, los campos magnéticos y la fuerza
En primer lugar, para facilitar la explicación de los principios del motor, repasemos las leyes básicas de la corriente eléctrica, los campos magnéticos y la fuerza. Aunque pueda producir nostalgia, es fácil olvidar estos conocimientos si no se utilizan con frecuencia componentes magnéticos.
Utilizaremos imágenes y fórmulas para ilustrarlo.
Diagrama esquemático de la rotación del motor
Cuando el bucle de alambre es un rectángulo, tenemos que considerar la fuerza que actúa sobre la corriente.
La fuerza F que actúa sobre los lados a y c puede calcularse mediante la siguiente fórmula:
Esto produce un par de torsión alrededor del eje central.
Por ejemplo, al considerar el estado en el que el ángulo de rotación es sólo θ, la fuerza que actúa sobre b y d en ángulos rectos es sinθ. Por lo tanto, el par Ta en el lado a puede expresarse mediante la siguiente fórmula:
Del mismo modo, considerando el lado c, el par se duplica y genera un par calculado mediante la siguiente fórmula:
Como el área del rectángulo es S = h x l, al sustituirla en la fórmula anterior se obtienen los siguientes resultados:
Esta fórmula no sólo es aplicable a los rectángulos, sino también a otras formas comunes, como los círculos. Los motores utilizan este principio.
Motor estándar
Un motor estándar, frecuente en artículos de uso cotidiano como juguetes eléctricos y maquinillas de afeitar eléctricas, suele ser un motor de corriente continua con escobillas. Se caracteriza por su alta velocidad y bajo par, y sólo necesita dos clavijas para funcionar. Cuando se conecta a los terminales positivo y negativo de una batería, el motor empieza a girar. Si se invierte la conexión, el motor girará en sentido contrario.
Motorreductor
Un motor reductor es un motor estándar equipado con un reductor. Este diseño reduce la velocidad de giro al tiempo que aumenta el par, lo que amplía la gama de aplicaciones prácticas del motor estándar.
Servomotor
Un servomotor se compone principalmente de una carcasa, una placa de circuitos, un motor sin núcleo, engranajes y un detector de posición. Funciona recibiendo una señal del receptor al servomotor. El circuito integrado determina el sentido de giro y acciona el motor sin núcleo para que empiece a girar.
El movimiento se transmite al brazo oscilante a través de los engranajes reductores, y el detector de posición envía simultáneamente señales de retorno para verificar si se ha alcanzado la posición prevista. El detector de posición es esencialmente una resistencia variable, que cambia los valores de resistencia a medida que gira el servomotor. Al detectar estos valores de resistencia, se puede determinar el ángulo de rotación.
Especificaciones facilitadas por fabricantes de servomotores suelen incluir las dimensiones (mm), el par (kg/cm), la velocidad (seg/60°), la tensión de prueba (V) y el peso (g). La unidad de par es kg/cm, que indica cuántos kilogramos pueden levantarse con una longitud de brazo oscilante de 1 cm.
Este es el concepto de brazo de palanca, por lo tanto, cuanto más largo sea el brazo, menor será el par. La unidad de velocidad es seg/60°, que representa el tiempo necesario para que el servomotor gire 60°.
Motor paso a paso
Un motor paso a paso es un elemento de control de bucle abierto que convierte señales de impulsos eléctricos en desplazamiento angular o lineal. En condiciones sin sobrecarga, la velocidad y la posición de parada del motor dependen únicamente de la frecuencia y el número de señales de impulso, independientemente de los cambios de carga.
Cuando un controlador paso a paso recibe una señal de impulso, acciona el motor paso a paso para que gire un ángulo fijo, conocido como "ángulo de paso", en una dirección predeterminada. Su rotación progresa en incrementos de ángulo fijos. El número de impulsos puede controlarse para gestionar el desplazamiento angular y lograr un posicionamiento preciso. Del mismo modo, la frecuencia de impulsos puede utilizarse para controlar la velocidad de giro y la aceleración del motor, logrando así la regulación de la velocidad.
Un servomotor, también conocido como motor actuador, sirve como unidad de ejecución en sistemas de control automático, convirtiendo las señales eléctricas recibidas en una salida de desplazamiento angular o velocidad angular en el eje del motor.
Se dividen en dos categorías principales: servomotores de corriente continua (CC) y servomotores de corriente alterna (CA). La característica principal de estos motores es que no se produce el fenómeno de autorrotación cuando la tensión de la señal es cero y la velocidad de giro disminuye uniformemente a medida que aumenta el par.
Los servomotores se basan principalmente en impulsos para el posicionamiento. Esencialmente, el servomotor gira un ángulo correspondiente a un impulso por cada impulso recibido, consiguiendo así el desplazamiento. Dado que el propio servomotor tiene la capacidad de emitir impulsos, emite un número correspondiente de impulsos por cada grado que gira.
Esto forma un sistema de respuesta o "bucle cerrado" con los impulsos recibidos. De este modo, el sistema sabe cuántos pulsos se han enviado al servomotor y cuántos pulsos se han recibido de vuelta. En consecuencia, puede controlar la rotación del motor con gran precisión, lo que permite un posicionamiento exacto de hasta 0,001 mm.
Los servomotores se dividen a grandes rasgos en servomotores de CA y servomotores de CC.
Los servomotores de CA se dividen a su vez en servomotores de CA asíncronos y servomotores de CA síncronos.
Los servomotores de CC se dividen en motores con escobillas y motores sin escobillas. Los motores con escobillas son baratos, de estructura sencilla, producen un par de arranque elevado, tienen una amplia gama de control de velocidad y son fáciles de controlar. Requieren mantenimiento, pero es incómodo (por ejemplo, la sustitución de las escobillas), producen interferencias electromagnéticas y tienen requisitos medioambientales específicos. Por lo tanto, son adecuados para aplicaciones industriales y civiles generales sensibles a los costes.
2. ¿Cómo giran los motores?
1)Los motores giran con ayuda de los imanes y la fuerza magnética
Alrededor de un imán permanente con un eje giratorio,
① Hacer girar el imán (para producir un campo magnético giratorio),
② Según el principio de polos opuestos se atraen y polos iguales se repelen entre el polo N y el polo S,
③ El imán con el eje giratorio girará.
Este es el principio básico de la rotación del motor.
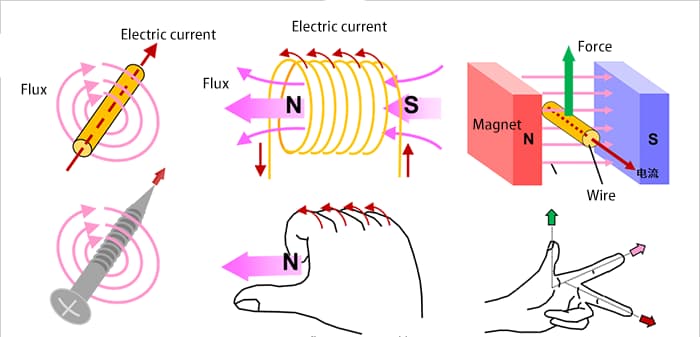
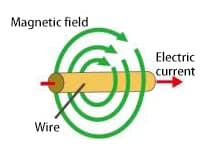
El flujo de corriente a través de un alambre genera un campo magnético giratorio (fuerza magnética) a su alrededor, que hace girar al imán.
De hecho, se trata del mismo estado operativo descrito anteriormente.
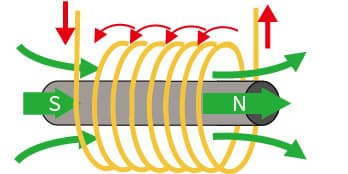
Además, si el alambre se enrolla en una bobina, las fuerzas magnéticas se combinan para formar un gran flujo de campo magnético (flujo magnético), que produce los polos N y S.
La inserción de un núcleo de hierro en el alambre en forma de bobina facilita el paso de las líneas del campo magnético y genera una fuerza magnética más intensa.
2)Motores rotativos prácticos
Aquí presentaremos el método práctico de utilizar CA trifásica y bobinas para producir un campo magnético giratorio como motor rotativo.
(La CA trifásica es una señal de CA con una diferencia de fase de 120°).
El campo magnético combinado en el estado ① anterior corresponde a la figura ① siguiente.
El campo magnético combinado en el estado ② anterior corresponde a la figura ② siguiente.
El campo magnético combinado en el estado ③ anterior corresponde a la figura ③ siguiente.
Como ya se ha mencionado, la bobina enrollada alrededor del núcleo de hierro se divide en tres fases, con bobina de fase U, bobina de fase V y bobina de fase W dispuestas a intervalos de 120°.
La bobina con alta tensión genera un polo N, mientras que la bobina con baja tensión genera un polo S.
Cada fase cambia según una onda sinusoidal, por lo que la polaridad (polo N, polo S) y el campo magnético (fuerza magnética) de cada bobina cambiarán.
En este momento, si observamos la bobina que produce un polo N, cambia secuencialmente de bobina de fase U a bobina de fase V a bobina de fase W a bobina de fase U, provocando la rotación.
3. Estructura de los motores pequeños
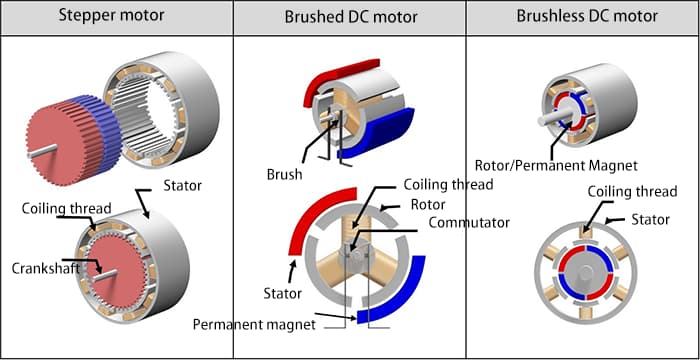
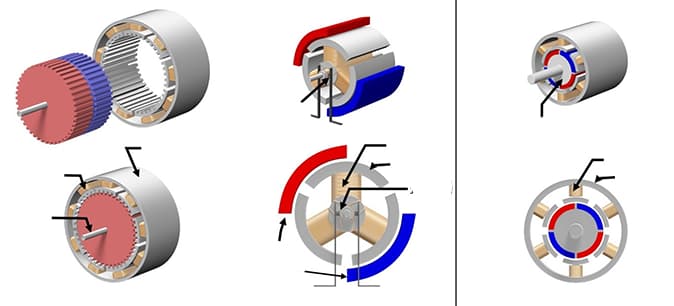
La siguiente figura muestra las estructuras aproximadas y las comparaciones de tres tipos de motores: el motor paso a paso, el motor de corriente continua con escobillas y el motor de corriente continua sin escobillas.
Los componentes básicos de estos motores son principalmente bobinas, imanes y rotores, y se clasifican en tipo bobina-fija y tipo imán-fija debido a sus diferentes tipos.
Lo que sigue es una explicación estructural relacionada con el diagrama de ejemplo. Como puede haber otras estructuras si las dividimos más finamente, entiéndase que este artículo describe la estructura general.
En el motor paso a paso que se muestra aquí, la bobina está fija en el lado exterior y el imán gira en el lado interior.
En el motor de CC con escobillas que se muestra aquí, el imán está fijo en el lado exterior y la bobina gira en el lado interior. Las escobillas y el conmutador se encargan de suministrar energía a la bobina y cambiar el sentido de la corriente.
En el motor sin escobillas que se muestra aquí, la bobina está fija en el lado exterior y el imán gira en el lado interior.
Debido a los distintos tipos de motor, aunque los componentes básicos sean los mismos, la estructura puede ser diferente. La explicación detallada se dará en cada sección.
4. Motor cepillado
Estructura del motor de escobillas
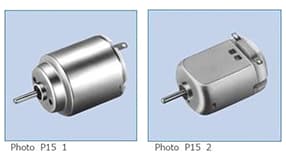
A continuación se muestra el aspecto de un motor de CC con escobillas de uso frecuente en maquetas, así como un diagrama de despiece de un motor típico de dos polos (2 imanes) y tres ranuras (3 bobinas). Es posible que muchas personas tengan experiencia desmontando motores y quitando imanes.
Como puede verse, el imán permanente de un motor de CC con escobillas es fijo, y las bobinas pueden girar alrededor del centro interno del motor. El lado fijo se llama "estator", mientras que el lado giratorio se llama "rotor".
A continuación se muestra un diagrama esquemático que representa el concepto de la estructura del motor.
Hay tres conmutadores (placas metálicas curvadas para conmutar la corriente) en la periferia del eje central giratorio. Para evitar que entren en contacto entre sí, los conmutadores están dispuestos a intervalos de 120 grados (360 grados ÷ 3). Los conmutadores giran con la rotación del eje.
Cada conmutador está conectado a un extremo de la bobina y a otro extremo de la bobina, y los tres conmutadores y las tres bobinas forman una red de circuitos en su conjunto (en forma de anillo).
Dos escobillas se fijan a 0° y 180° para entrar en contacto con los conmutadores. La fuente de alimentación de CC externa se conecta a las escobillas, y la corriente fluye a lo largo de la trayectoria de escobilla → colector → bobina → escobilla.
Principio de funcionamiento de un motor con escobillas.
① Rotación en sentido contrario a las agujas del reloj desde el estado inicial.
En el estado inicial, la Bobina A está en la parte superior, y la alimentación está conectada a las escobillas con los lados izquierdo (+) y derecho (-) definidos. Una gran corriente fluye desde la escobilla izquierda a través del conmutador hasta la bobina A, y el lado superior (exterior) de la bobina A se convierte en una estructura de polos en S.
Como la mitad de la corriente que circula por la bobina A desde la escobilla izquierda hacia las bobinas B y C es de sentido contrario al de la bobina A, el lado exterior de las bobinas B y C se convierte en un polo N más débil (representado por letras más pequeñas en el diagrama).
Los campos magnéticos generados en estas bobinas y la repulsión y atracción entre los imanes hacen que la bobina gire en sentido contrario a las agujas del reloj.
② Más rotación en sentido contrario a las agujas del reloj
Suponiendo que la bobina A se encuentra en un estado de rotación de 30 grados en sentido antihorario, la escobilla derecha entra en contacto con dos conmutadores.
La corriente en la bobina A sigue fluyendo desde la escobilla izquierda a través de la escobilla derecha, y el lado exterior de la bobina A sigue siendo un polo S.
Por la bobina B circula la misma corriente que por la bobina A, y el lado exterior de la bobina B se convierte en un polo N más fuerte.
Como ambos extremos de la bobina C están cortocircuitados por las escobillas, no circula corriente ni se genera campo magnético.
Incluso en este caso, la bobina está sometida a una fuerza de rotación en sentido contrario a las agujas del reloj.
De ③ a ④, la bobina superior sigue sometida a una fuerza hacia la izquierda y la bobina inferior sigue sometida a una fuerza hacia la derecha, continuando la rotación en sentido antihorario.
Cada vez que la bobina gira 30 grados a los estados ③ y ④, el lado exterior de la bobina se convierte en un polo S cuando la bobina se encuentra por encima del eje horizontal central, y en un polo N cuando la bobina se encuentra por debajo, realizando repetidamente este movimiento.
En otras palabras, la bobina superior recibe repetidamente una fuerza hacia la izquierda, y la bobina inferior recibe repetidamente una fuerza hacia la derecha (ambas en sentido antihorario). Esto hace que el rotor gire continuamente en sentido antihorario.
Si la alimentación se conecta a la escobilla izquierda (-) y a la escobilla derecha (+) opuestas, la bobina genera un campo magnético en sentido contrario y el sentido de la fuerza aplicada a la bobina se invierte, provocando la rotación en el sentido de las agujas del reloj.
Además, cuando se desconecta la fuente de alimentación, el rotor del motor con escobillas deja de girar porque no hay campo magnético que lo mantenga girando.
5. Motor trifásico sin escobillas de onda completa
Aspecto y estructura del motor trifásico sin escobillas de onda completa
La siguiente figura muestra un ejemplo del aspecto y la estructura de un motor sin escobillas.
A la izquierda se muestra un ejemplo de motor de husillo para hacer girar discos en un dispositivo de reproducción de discos. Hay un total de nueve bobinas, formadas por tres fases multiplicadas por tres.
A la derecha se muestra un ejemplo de motor de husillo para un dispositivo DDF, que tiene 12 bobinas (tres fases por cuatro). Las bobinas están fijadas a la placa de circuito y enrolladas alrededor de un núcleo de hierro.
El componente en forma de disco situado a la derecha de la bobina es un rotor de imán permanente. El borde exterior está formado por un imán permanente, y el eje del rotor se inserta en el centro de la bobina y cubre parte de ella. El imán permanente gira alrededor del borde exterior de la bobina.
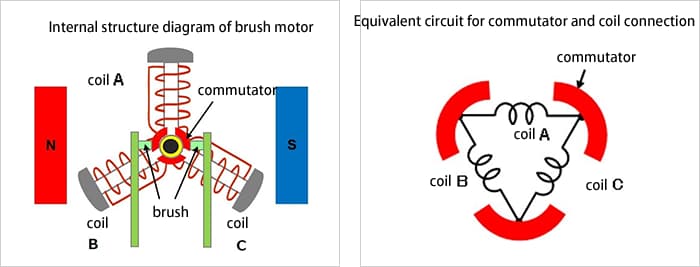
El diagrama de la estructura interna de un motor trifásico sin escobillas de onda completa y el circuito equivalente para las conexiones de la bobina.
A continuación se muestran diagramas simplificados de la estructura interna y el circuito equivalente para las conexiones de las bobinas.
El diagrama simplificado muestra un motor de 2 polos (2 imanes) y 3 ranuras (3 bobinas) con una estructura sencilla. Es similar a un motor con escobillas estructura motriz con el mismo número de polos y ranuras, pero el lado de la bobina es fijo mientras que los imanes pueden girar. Por supuesto, no hay escobillas.
En este caso, las bobinas están conectadas en forma de Y y se utilizan componentes semiconductores para suministrar corriente a las bobinas. El flujo de corriente se controla en función de la posición de los imanes giratorios.
En este ejemplo, se utilizan elementos Hall para detectar la posición de los imanes. Los elementos Hall se colocan entre las bobinas y detectan la tensión generada por la intensidad del campo magnético, que se utiliza como información de posición. En la imagen del motor de husillo para el dispositivo DDF proporcionada anteriormente, también pueden verse elementos Hall entre las bobinas para la detección de la posición (encima de las bobinas).
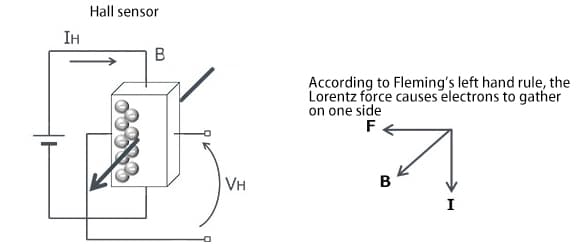
Los elementos Hall son sensores magnéticos muy conocidos que convierten el tamaño del campo magnético en el tamaño de la tensión y representan la dirección del campo magnético con una tensión positiva o negativa.
A continuación se muestra un diagrama esquemático que ilustra el efecto Hall.
El elemento Hall utiliza el fenómeno de que "cuando una corriente IH atraviesa un semiconductor y un flujo magnético B pasa perpendicular a la corriente, se genera una tensión VH en la dirección perpendicular tanto a la corriente como al campo magnético". El físico estadounidense Edwin Herbert Hall descubrió este fenómeno y lo denominó "efecto Hall". La tensión VH generada se expresa mediante la siguiente fórmula:
VH = (KH / d)・IH・B
※KH: coeficiente Hall, d: espesor de la superficie de penetración del flujo magnético.
Como muestra la fórmula, cuanto mayor es la corriente, mayor es la tensión. Esta característica se utiliza habitualmente para detectar la posición del rotor (imán).
Principio de rotación de los motores trifásicos sin escobillas de onda completa
A continuación se explicará el principio de rotación de un motor sin escobillas en los pasos 1 a 6. Para facilitar la comprensión, se ha simplificado el imán permanente de forma circular a forma rectangular.
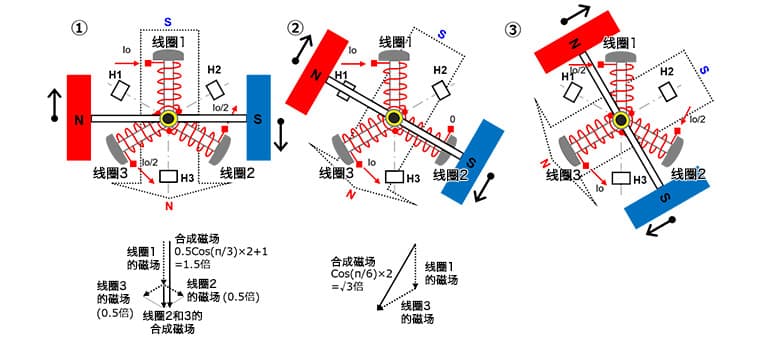
① En un sistema de bobina trifásica, la bobina 1 está fija en la posición de las 12 en punto, la bobina 2 está fija en la posición de las 4 en punto y la bobina 3 está fija en la posición de las 8 en punto de la esfera del reloj. Un imán permanente de 2 polos con su polo N a la izquierda y su polo S a la derecha puede girar.
Hacer pasar una corriente Io por la bobina 1 para producir un campo magnético de polo S en el exterior de la bobina. Hacer pasar una corriente Io/2 por las bobinas 2 y 3 para producir un campo magnético de polo N en el exterior de la bobina.
Cuando los campos magnéticos de las bobinas 2 y 3 se combinan vectorialmente, se produce un campo magnético de polo N que apunta hacia abajo. Este campo magnético es 0,5 veces el campo magnético producido por la corriente Io que pasa por una sola bobina, y cuando se añade al campo magnético de la bobina 1, se hace 1,5 veces más fuerte. Esto produce un campo magnético combinado perpendicular al imán permanente, que genera el par máximo y hace que el imán permanente gire en el sentido de las agujas del reloj.
A medida que la corriente a través de la bobina 2 se reduce y la corriente a través de la bobina 3 se incrementa en función de la posición de rotación, el campo magnético combinado también gira en el sentido de las agujas del reloj, haciendo que el imán permanente continúe girando.
② En un estado girado de 30 grados, una corriente Io pasa por la bobina 1, haciendo que la corriente en la bobina 2 sea cero y haciendo que la corriente Io salga por la bobina 3.
El exterior de la bobina 1 se convierte en un polo S y el exterior de la bobina 3 en un polo N. Cuando se combinan vectorialmente, el campo magnético producido es √3 (≈1,72) veces más fuerte que el campo magnético producido por la corriente Io que pasa por una sola bobina. Esto también produce un campo magnético combinado perpendicular al imán permanente, que gira en el sentido de las agujas del reloj.
Al cambiar la posición de rotación, la corriente que fluye hacia la bobina 1 se reduce, la corriente que fluye hacia la bobina 2 parte de cero y aumenta, y la corriente que fluye hacia la bobina 3 aumenta hasta Io. Como resultado, el campo magnético combinado también gira en el sentido de las agujas del reloj, haciendo que el imán permanente continúe girando.
※ Suponiendo que cada corriente de fase es una onda sinusoidal, el valor de la corriente aquí es Io × sin(π⁄3) = Io × √3⁄2. Mediante la combinación vectorial de los campos magnéticos, la magnitud total del campo magnético es 1,5 veces el campo magnético producido por una sola bobina.
Cuando cada corriente de fase es una onda sinusoidal, independientemente de la posición del imán permanente, la magnitud del campo magnético combinado vectorialmente es siempre 1,5 veces el campo magnético producido por una sola bobina, y el campo magnético es perpendicular al campo magnético del imán permanente en un ángulo de 90 grados.
③ En una rotación continua de 30 grados, una corriente de Io/2 fluye a través de la bobina 1, una corriente de Io/2 fluye a través de la bobina 2, y una corriente de Io fluye fuera de la bobina 3.
El exterior de la bobina 1 se convierte en un polo S, el exterior de la bobina 2 también se convierte en un polo S, y el exterior de la bobina 3 se convierte en un polo N. Cuando se combinan vectorialmente, el campo magnético producido es 1,5 veces el campo magnético producido cuando una corriente de Io pasa por una sola bobina (igual que en el paso 1). Esto también produce un campo magnético combinado perpendicular al campo magnético del imán permanente en un ángulo de 90 grados y gira en el sentido de las agujas del reloj.
④-⑥
Continúe girando de la misma manera que en los pasos 1-3.
De este modo, si la corriente que fluye por las bobinas se conmuta continuamente en función de la posición del imán permanente, éste girará en una dirección fija. Del mismo modo, si se hace fluir la corriente en sentido contrario y se invierte la dirección del campo magnético combinado, la rotación será en sentido antihorario.
El siguiente diagrama muestra la corriente que circula por cada bobina para cada paso del 1 al 6.
A través de la explicación anterior, ahora debe entenderse la relación entre los cambios de corriente y la rotación.
6. Motor paso a paso
Un motor paso a paso es un tipo de motor que puede controlarse con precisión en términos de ángulo de rotación y velocidad sincronizándolo con una señal de impulsos. Los motores paso a paso también se conocen como "motores de impulsos".
Debido a su capacidad para lograr un posicionamiento preciso sin el uso de sensores de posición y sólo con control de bucle abierto, los motores paso a paso se utilizan ampliamente en equipos que requieren posicionamiento.
Estructura del motor paso a paso (bifásico bipolar)
Las siguientes imágenes, de izquierda a derecha, muestran ejemplos del aspecto de un motor paso a paso, un diagrama esquemático de su estructura interna y un diagrama conceptual de su estructura.
En el ejemplo de la imagen, se muestran los tipos HB (híbrido) y PM (imán permanente) de motores paso a paso. El diagrama esquemático del centro también muestra la estructura de los tipos HB y PM.
Un motor paso a paso tiene una estructura en la que las bobinas están fijas y el imán permanente gira. El diagrama conceptual de la estructura interna del motor paso a paso de la derecha es un ejemplo de motor PM con bobinas bifásicas (dos juegos).
En el ejemplo de la estructura básica del motor paso a paso, las bobinas están dispuestas en el exterior y el imán permanente en el interior. Además del tipo bifásico, existen tipos con más fases, como los trifásicos y los de cinco fases.
Algunos motores paso a paso tienen estructuras diferentes, pero para explicar el principio básico de funcionamiento de los motores paso a paso, este artículo presenta el motor paso a paso con la estructura básica de bobinas fijas e imanes permanentes giratorios.
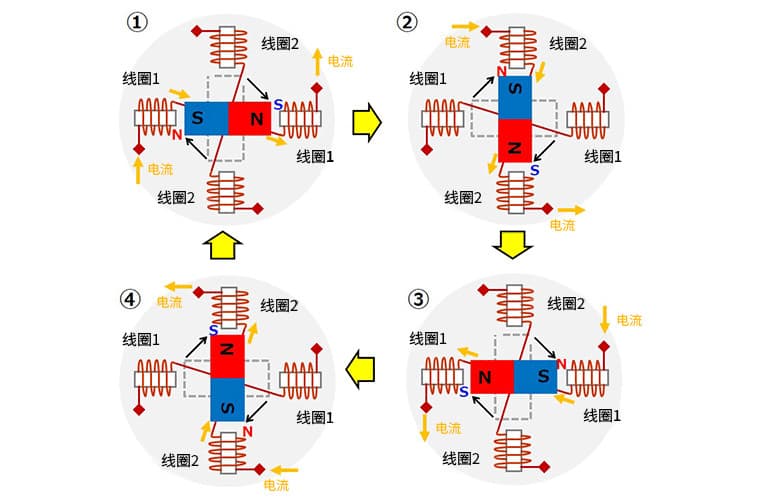
El siguiente diagrama se utiliza para explicar el principio básico de funcionamiento del motor paso a paso. Se trata de un ejemplo de excitación de cada fase (un juego de bobinas) de las bobinas bipolares bifásicas mostradas en la imagen anterior, suponiendo un cambio de estado de ① a ④. Las bobinas están compuestas por las bobinas 1 y 2, y la flecha de corriente indica la dirección del flujo de corriente.
①
La corriente eléctrica fluye por el lado izquierdo de la bobina 1 y sale por el lado derecho.
No permita que fluya corriente eléctrica a través de la bobina 2.
En este punto, el interior de la bobina izquierda 1 se convierte en Norte, y el interior de la bobina derecha 1 se convierte en Sur.
Como resultado, el imán permanente del medio es atraído por el campo magnético de la bobina 1 y se detiene en un estado en el que el lado izquierdo está al Sur y el derecho al Norte.
②
Detenga la corriente en la bobina 1 y permita que la corriente fluya desde la parte superior de la bobina 2 y salga por la parte inferior.
El interior de la bobina superior 2 se convierte en Norte, y el interior de la bobina inferior 2 se convierte en Sur.
El imán permanente es atraído por su campo magnético, gira 90° en el sentido de las agujas del reloj y se detiene.
③
Detenga la corriente en la bobina 2 y permita que la corriente fluya desde el lado derecho de la bobina 1 y salga por el lado izquierdo.
El interior de la bobina izquierda 1 se convierte en Sur, y el interior de la bobina derecha 1 se convierte en Norte.
El imán permanente es atraído por su campo magnético, gira otros 90° en el sentido de las agujas del reloj y se detiene.
④
Detenga la corriente en la bobina 1 y permita que la corriente fluya desde la parte inferior de la bobina 2 y salga por la parte superior.
El interior de la bobina superior 2 se convierte en Sur, y el interior de la bobina inferior 2 se convierte en Norte.
El imán permanente es atraído por su campo magnético, gira otros 90° en el sentido de las agujas del reloj y se detiene.
Conmutando la corriente que circula por las bobinas en el orden de los pasos ① a ④ mediante circuitos electrónicos, el motor paso a paso puede girar. En este ejemplo, cada acción de conmutación girará el motor paso a paso 90°.
Además, al fluir continuamente la corriente a través de una bobina en particular, el motor paso a paso puede mantener su posición detenida y tener un par de retención. Vale la pena mencionar que invertir el orden de la corriente que fluye a través de las bobinas puede hacer que el motor paso a paso gire en la dirección opuesta.
Como fundador de MachineMFG, he dedicado más de una década de mi carrera a la industria metalúrgica. Mi amplia experiencia me ha permitido convertirme en un experto en los campos de la fabricación de chapa metálica, mecanizado, ingeniería mecánica y máquinas herramienta para metales. Estoy constantemente pensando, leyendo y escribiendo sobre estos temas, esforzándome constantemente por mantenerme a la vanguardia de mi campo. Deje que mis conocimientos y experiencia sean un activo para su empresa.
¿Se ha preguntado alguna vez qué hace que un motor eléctrico funcione sin sobrecalentarse? Conocer las temperaturas de funcionamiento seguras de los motores es crucial para su longevidad y rendimiento. En este artículo,...
En el vertiginoso mundo de la automatización industrial, los servomotores son los héroes anónimos que impulsan la precisión y la eficacia. Pero con innumerables fabricantes compitiendo por la atención, ¿cómo saber cuáles...
¿Se ha preguntado alguna vez cómo realizan sus potentes tareas las excavadoras y otras máquinas pesadas? En este artículo, exploraremos las fascinantes diferencias entre bombas y motores hidráulicos. Aprenderá cómo...
¿Alguna vez se ha preguntado cómo consiguen las máquinas movimientos precisos? Este blog se sumerge en el fascinante mundo de los modos de control de los servomotores. Desde el control por impulsos hasta el analógico, exploraremos cómo funciona cada método...
¿Alguna vez se ha preguntado cómo los trenes pueden flotar sobre las vías o cómo los robots consiguen movimientos precisos? Este artículo desvela el fascinante mundo de los motores lineales, explicando sus principios, tipos y ventajas únicas....
¿Alguna vez se ha preguntado cómo elegir el motor perfecto para su proyecto? La clave está en conocer los tipos de motores (CC, asíncronos y síncronos) y sus ventajas únicas. Este artículo desglosa...
¿Por qué se calientan tanto los rodamientos de los motores y qué se puede hacer al respecto? Este artículo profundiza en las causas de la generación de calor en los rodamientos de los motores, desde...
¿Qué ocurre cuando el equilibrio magnético de un motor está desequilibrado? La atracción magnética unilateral se produce debido a un entrehierro desequilibrado en los motores, lo que provoca fuerzas desiguales que sobrecargan los cojinetes del motor. Este artículo...
¿Cómo influyen los rodamientos en la eficacia y durabilidad de los motorreductores de engranajes cilíndricos? Este artículo profundiza en el papel fundamental de los rodamientos, analizando su selección y disposición, y cómo...