Exploración del umbral de vibración de los cojinetes de motores eléctricos
¿Cómo se determina el nivel máximo de vibración de los rodamientos de motores eléctricos? Esta cuestión crucial afecta tanto a los límites operativos como a las pruebas posteriores a la instalación. El artículo explora las normas internacionales y nacionales para los límites de vibración, considera las condiciones de carga y analiza enfoques prácticos de medición. Con su lectura, comprenderá los factores que influyen en las vibraciones de los motores y aprenderá a medir e interpretar con precisión estas vibraciones en distintas condiciones de funcionamiento.
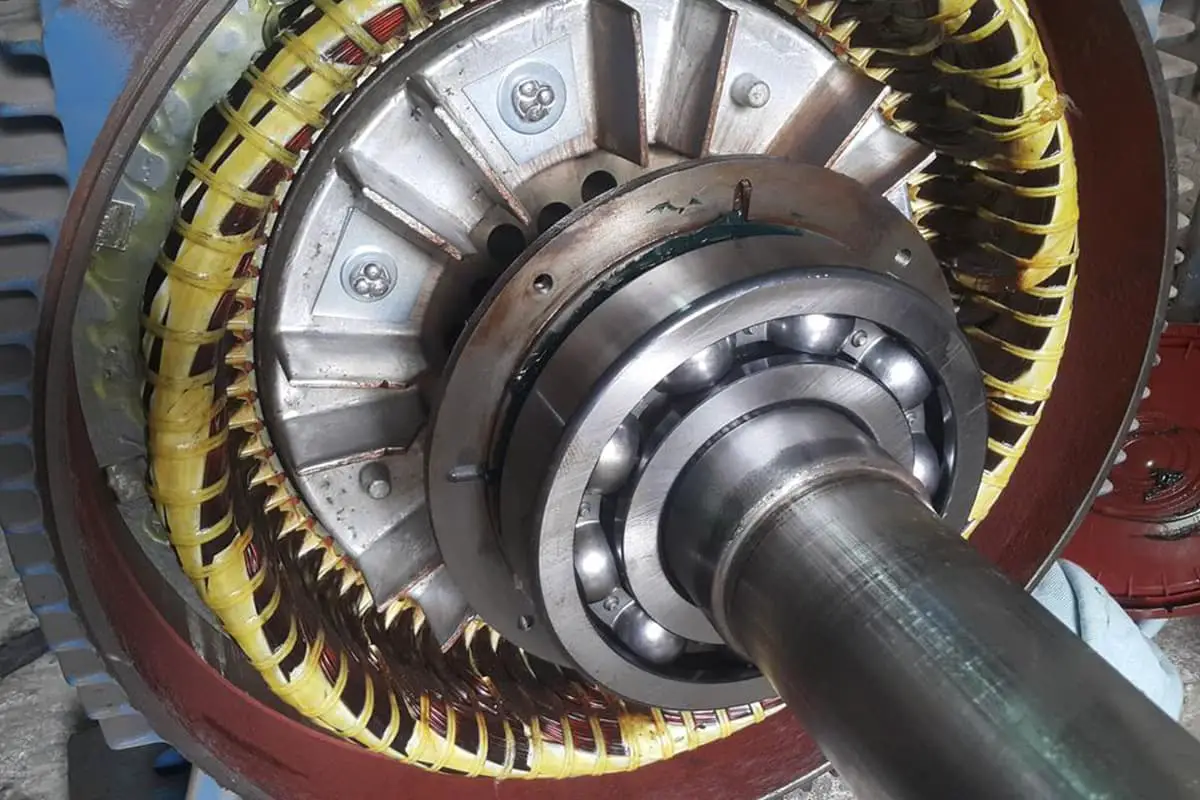
Con frecuencia, la gente pregunta cuánto no debe superar la vibración máxima de un rodamiento de motor. En realidad, esta pregunta puede ser doble. Por un lado, cuál es la vibración máxima que puede soportar el rodamiento de un motor y, por otro, una vez instalado el motor y comprobadas las vibraciones, cuál debe ser la vibración máxima.
Para la primera, se puede verificar y calcular la selección del rodamiento considerando la vibración ambiental como una carga de impacto. De hecho, la mayoría de los amigos preguntan por el segundo, es decir, durante el funcionamiento del rodamiento del motor, cuál debe ser el valor máximo de vibración del motor y del rodamiento en su conjunto. Vamos a discutir esto aquí.
Existen muchas normas internacionales y nacionales sobre los valores límite de las vibraciones de los rodamientos de los motores. Ya que tenemos normas, ¿por qué mucha gente sigue teniendo problemas con el límite máximo? La pregunta habitual es: ¿se trata de límites en vacío o a plena carga? ¿Son estos valores límite RMS u otros valores?
En primer lugar, veamos la norma ISO2372 como se muestra en la siguiente figura:
Límites del rango de gravedad de las vibraciones (Velocidad)
Rangos de gravedad de las vibraciones para máquinas pertenecientes a:.
Según ISO 2372
In/Sec(PK)
MM/Sec(RMS)
Clase I
Clase II
Clase III
Clase IV
<20CV
20-100 CV
>100CV
>100CV
0.015
0.28
A
A
A
A(Bueno)
0.025
0.45
0.039
0.71
B
B
B
B(Permisible)
0.062
1.12
0.099
1.8
C
C
C
C(Tolerable)
0.154
2.8
0.248
4.5
D
D
D
D(No permitido)
0.392
7.1
0.617
11.2
0.993
18
1.54
28
2.48
45
3.94
71
Es fácil ver en la tabla que las unidades de intensidad de la vibración, incluidas la velocidad RMS y el pico de desplazamiento, figuran a la izquierda.
Así pues, surge la pregunta: ¿debe un ingeniero medir un motor en vacío o a plena carga? Por lo que sabemos de los rodamientos de los motores, la carga de par del propio motor, ya sea en vacío o a plena carga, no afecta significativamente a los rodamientos.
Por lo tanto, desde el punto de vista de los rodamientos, el hecho de que el motor funcione en vacío o a plena carga no afecta al resultado. Sin embargo, esto no tiene en cuenta el estator del motor. En condiciones de trabajo reales, el estado del estator del motor y la carga pueden afectar a la vibración general del cuerpo del motor. Tenga en cuenta que no se trata de la vibración del rodamiento, sino de la vibración global.
Por lo tanto, al medir un motor, existe una diferencia entre el funcionamiento en vacío y a plena carga. Esto debe tenerse en cuenta en las mediciones reales.
Según la norma ISO10816, las vibraciones de los equipos deben probarse en todos los posibles estados de funcionamiento previstos, y el valor máximo obtenido en las pruebas debe servir como representativo de la intensidad de las vibraciones.
En otras palabras, se toma el valor máximo entre todos los estados de funcionamiento del equipo. Estos estados incluyen no sólo el vacío y la plena carga, sino que consideraciones más rigurosas podrían incluir también otros estados intermedios.
La razón de esta disposición en la norma es considerar el daño máximo que la vibración puede causar al equipo y establecer la intensidad de vibración máxima admisible. (Si los ingenieros comprenden este principio, sabrán por qué se elige el desplazamiento para las vibraciones de baja velocidad, la velocidad para las de velocidad media y la aceleración para las de alta velocidad).
Por supuesto, las indicaciones anteriores se refieren a la gravedad de las vibraciones de los equipos en general. Para los motores, existen algunas normas más detalladas.
Por ejemplo, GB/T 5171.1-2014 estipula el límite de vibración de la velocidad nominal de los pequeños motores convertidores de potencia en condiciones sin carga. La norma define claramente que el objeto de medición es la vibración en vacío. Por lo tanto, según esta norma, solo es necesario tener en cuenta la vibración en vacío.
En la práctica, los ingenieros de las fábricas de motores pueden optar por medir las vibraciones de los motores en función de las normas correspondientes. A la hora de elegir, no se trata sólo de leer las tablas de las normas, las explicaciones que las acompañan pueden ser bastante cruciales. Si una determinada tipo de motor no tiene una norma al respecto, como mínimo debe cumplir lo estipulado para los equipos generales en la norma ISO 2371.
Además, aparte de las regulaciones de las normas mencionadas, si un usuario de motor proporciona un límite para la vibración del motor, la fábrica de motores tiene que medir de acuerdo con las normas del cliente.
Como fundador de MachineMFG, he dedicado más de una década de mi carrera a la industria metalúrgica. Mi amplia experiencia me ha permitido convertirme en un experto en los campos de la fabricación de chapa metálica, mecanizado, ingeniería mecánica y máquinas herramienta para metales. Estoy constantemente pensando, leyendo y escribiendo sobre estos temas, esforzándome constantemente por mantenerme a la vanguardia de mi campo. Deje que mis conocimientos y experiencia sean un activo para su empresa.
Imagine desbloquear la precisión de las máquinas herramienta con una simple superficie de cristal. Las escalas de rejilla lineal hacen precisamente eso, transformar líneas finas en mediciones de gran precisión. Este artículo explora cómo estas...
¿Qué tipo de preguntas pueden ayudarle a superar una entrevista de ingeniería mecánica? Este artículo analiza las 20 mejores preguntas que ponen a prueba diversos aspectos de la ingeniería mecánica, desde los sistemas de transmisión...
¿Alguna vez se ha maravillado de la versatilidad de los muelles en ingeniería mecánica? Desde las suspensiones de los automóviles hasta los instrumentos de precisión, estos héroes anónimos desempeñan un papel crucial. En esta entrada del blog...
¿Su sistema hidráulico no rinde como esperaba? Entender cómo calcular la eficiencia de una bomba hidráulica puede cambiar las reglas del juego. Este artículo desglosa el proceso en sencillos pasos, ayudándole...
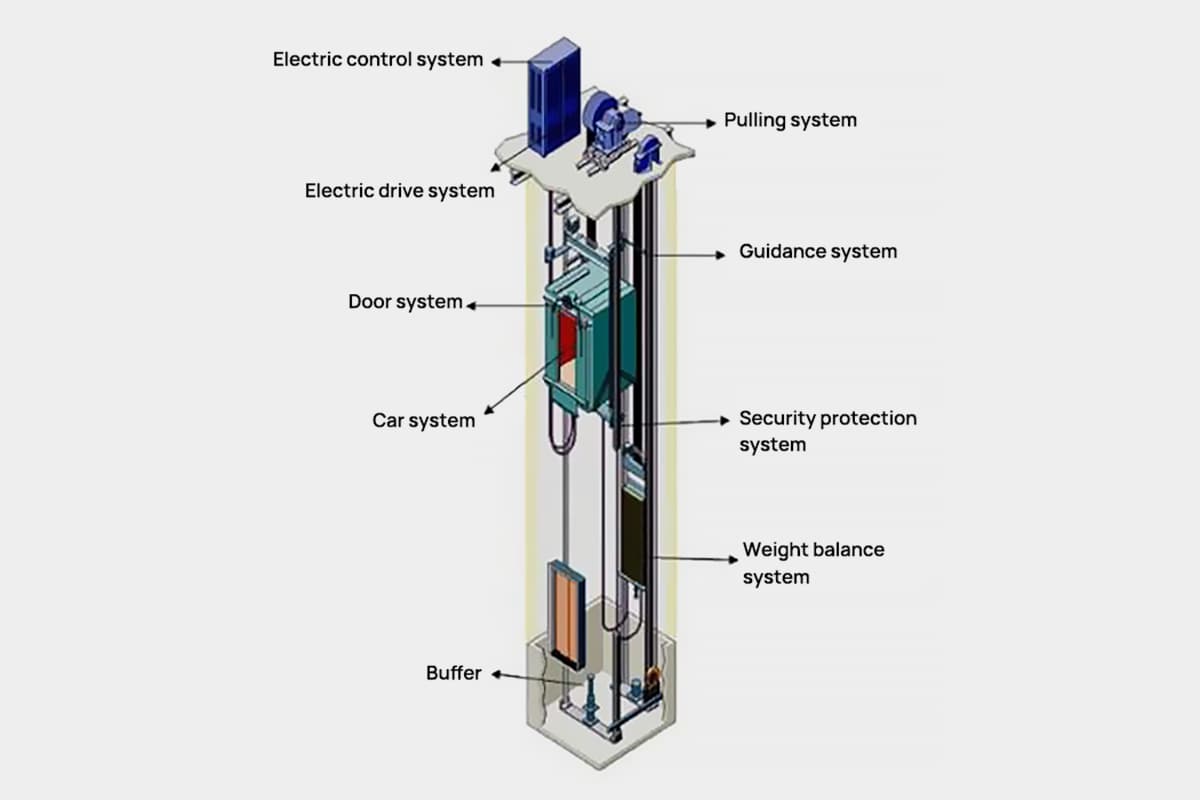
¿Se ha preguntado alguna vez qué es lo que le mantiene seguro y en movimiento dentro de un ascensor? En este artículo nos adentramos en la intrincada estructura y los principios de funcionamiento de los ascensores,...
¿Qué hace que materiales como el POM, el PTFE y el nailon sean vitales para la maquinaria no estándar? Este artículo explora ocho materiales no metálicos de uso común que son indispensables en diversas aplicaciones mecánicas. Desde el desgaste...
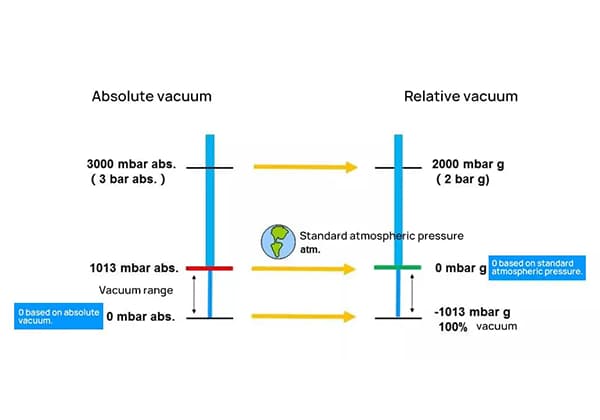
¿Busca los principales fabricantes de bombas de vacío? Este artículo destaca las marcas líderes del sector para 2024, como NASH, Edwards, Leybold y Atlas Copco. Cada empresa es conocida por...
¿Se ha preguntado alguna vez por qué los rodamientos de su maquinaria se calientan y provocan costosos tiempos de inactividad? Las altas temperaturas de los rodamientos pueden acortar su vida útil y disparar los gastos de mantenimiento. Este artículo analiza las causas más comunes, como...
Imagine un mundo en el que las máquinas no sólo fabriquen nuestros productos, sino que también piensen y aprendan como nosotros. En este artículo, exploramos cómo la inteligencia artificial está transformando la industria manufacturera....