Moteur à courant continu sans balais et moteur synchrone à aimant permanent
Vous êtes-vous déjà demandé ce qui différencie les moteurs à courant continu sans balais des moteurs synchrones à aimant permanent ? Cet article plonge dans le monde fascinant de ces deux types de moteurs, en explorant leurs principes, leurs méthodes de contrôle, leur efficacité et leurs caractéristiques de réponse. À la fin, vous saurez quel est le moteur le mieux adapté à vos besoins.
Les moteurs à courant continu sans balais (BLDC) et les moteurs synchrones à aimant permanent (PMSM) sont deux types de moteurs largement utilisés dans le domaine des moteurs électriques modernes.
Bien qu'ils présentent de nombreuses similitudes, il existe encore des différences importantes entre eux. Cet article propose une comparaison exhaustive, factuelle et détaillée de ces deux types de moteurs sous plusieurs aspects.
1. Principe et structure du moteur à courant continu sans balais
Moteur DC sans balais :
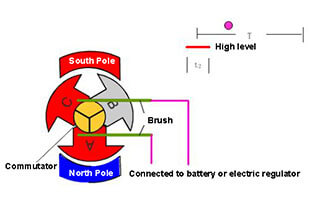
Le moteur à courant continu sans balais fonctionne sur la base d'un champ magnétique rotatif formé par le potentiel magnétique à l'extrémité de l'arbre, synchronisant la commutation de phase à travers le pôle de détection pour entraîner le mouvement du rotor.
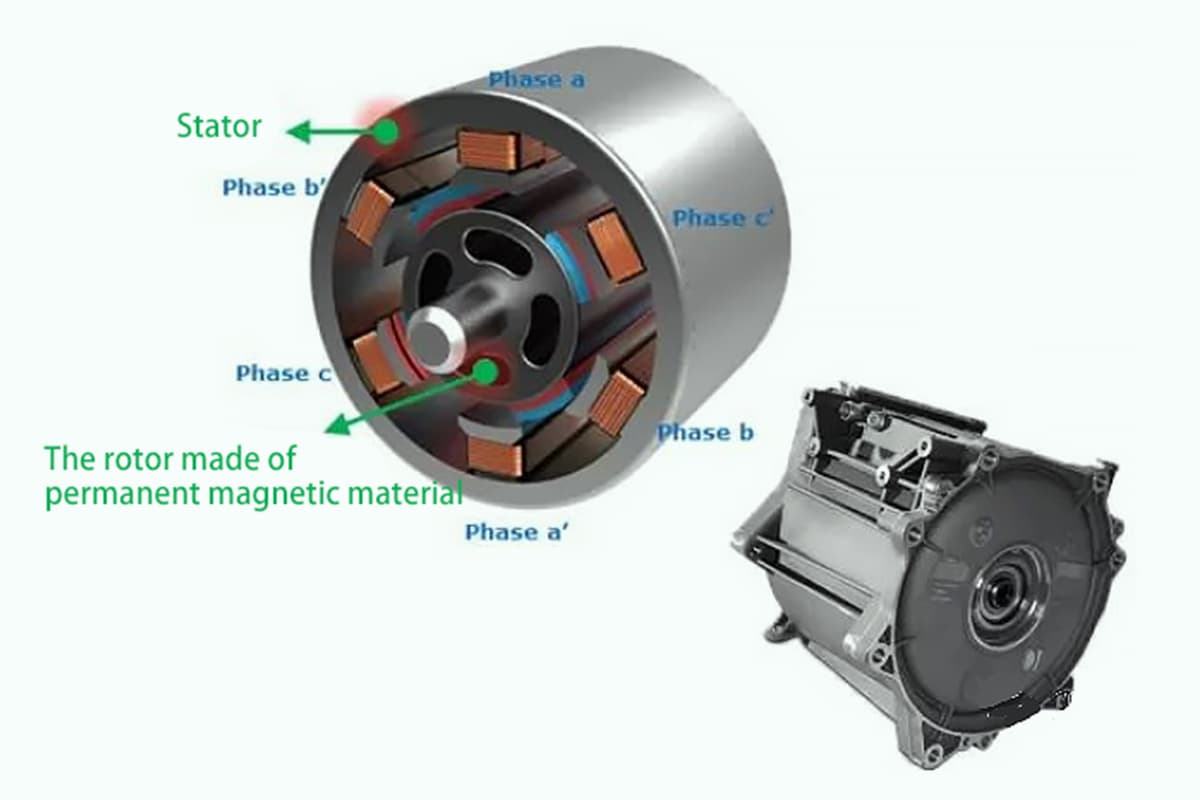
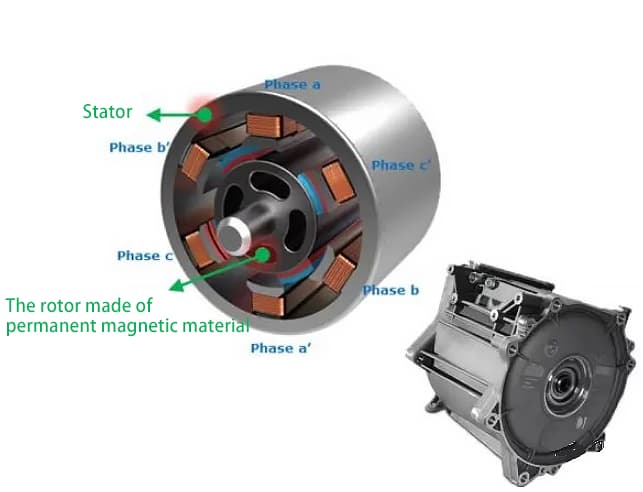
Sa structure se compose d'un rotor formé d'aimants permanents, d'un stator enveloppé de bobines et d'un capteur de position. En modifiant la direction et l'intensité du courant, il est possible de contrôler le mouvement du rotor.
Moteur synchrone à aimant permanent :
Le moteur synchrone à aimant permanent fonctionne sur l'interaction des potentiels magnétiques entre le stator et le rotor, générant un couple pour entraîner le mouvement du rotor.
Le rotor génère un champ magnétique rotatif grâce à des aimants permanents, tandis que les bobines du stator créent un champ magnétique d'excitation. L'interaction de ces deux champs magnétiques entraîne le rotor.
La structure d'un moteur synchrone à aimants permanents est similaire à celle d'un moteur à courant continu sans balais, mais la différence réside dans la fonction des bobines du stator : dans les moteurs à courant continu sans balais, elles assistent le champ magnétique, alors que dans les moteurs synchrones à aimants permanents, elles génèrent le champ magnétique d'excitation.
2. Méthodes de contrôle Moteur CC sans balais :
Moteur DC sans balais :
La commande des moteurs à courant continu sans balais fait principalement appel à deux méthodes : le retour d'information du capteur de Hall et le contrôle de la force électromotrice inverse. La méthode de rétroaction du capteur de Hall détermine le moment de la commutation en détectant la position du rotor, en contrôlant la direction et l'ampleur du courant.
La méthode de contrôle de la force contre-électromotrice estime la position du rotor et mesure la force contre-électromotrice des bobines de l'induit pour le contrôle. Cette méthode permet d'obtenir un rendement et un couple élevés.
Moteur synchrone à aimant permanent :
Les méthodes de contrôle des moteurs synchrones à aimant permanent comprennent principalement le contrôle du courant et le contrôle orienté vers le champ. La méthode de contrôle du courant permet de contrôler le couple et la vitesse du moteur en mesurant le courant.
La commande orientée champ estime la position du rotor et mesure la force contre-électromotrice du rotor pour contrôler le courant, ce qui permet d'obtenir un contrôle et une réponse plus précis.
3. Densité de puissance et efficacité Moteur à courant continu sans balais :
Moteur DC sans balais :
Les moteurs à courant continu sans balais ont une densité de puissance et un rendement élevés. Grâce à leur structure simple, sans balais ni problèmes d'usure, ils peuvent atteindre une puissance de sortie élevée.
De plus, l'utilisation du contrôle de la force électromotrice arrière réduit les pertes de cuivre et de fer, ce qui permet un fonctionnement efficace.
Moteur synchrone à aimant permanent :
Les moteurs synchrones à aimant permanent ont une densité de puissance élevée mais un rendement relativement faible. En raison de leur structure complexe et de la nécessité de maintenir un champ magnétique d'excitation dans les bobines du stator, des pertes de cuivre et de fer se produisent.
En outre, la présence d'un champ magnétique tournant entraîne des pertes supplémentaires dues aux courants de Foucault. Néanmoins, l'efficacité peut être améliorée grâce à des stratégies de contrôle optimisées et à des technologies de matériaux avancées.
4. Caractéristiques de réponse et plage de contrôle Moteur à courant continu sans balais
Moteur DC sans balais :
Les moteurs à courant continu sans balais présentent de bonnes caractéristiques de réponse et une large plage de contrôle. Leurs rotors étant constitués d'aimants permanents, ils présentent une faible inertie et une vitesse de réponse rapide. En outre, les moteurs CC sans balais peuvent être contrôlés avec précision en ajustant l'amplitude et la direction du courant pour répondre à diverses exigences opérationnelles.
Moteur synchrone à aimant permanent :
Les moteurs synchrones à aimant permanent ont des caractéristiques de réponse relativement moins bonnes et une plage de contrôle plus étroite. En raison de l'inertie plus importante du rotor, la vitesse de réponse du rotor est plus lente. En outre, la commande des moteurs synchrones à aimant permanent est plus complexe, car elle nécessite une estimation précise de la position du rotor et de la force contre-électromotrice pour une commande précise.
5. Enveloppez le tout
En résumé, les moteurs à courant continu sans balais et les moteurs synchrones à aimant permanent présentent des différences notables sur des aspects tels que le principe et la structure, les méthodes de contrôle, la densité de puissance et le rendement, ainsi que les caractéristiques de réponse et la plage de contrôle. En fonction des exigences de l'application, le moteur à courant continu sans balais et le moteur synchrone à aimants permanents sont appropriés. type de moteur peut être choisi.
Les moteurs à courant continu sans balais conviennent aux applications nécessitant une puissance de sortie élevée et un contrôle précis, tandis que les moteurs synchrones à aimant permanent conviennent aux applications nécessitant une densité de puissance élevée et une plage de contrôle plus large.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Vous êtes-vous déjà demandé pourquoi les moteurs sans balais sont plus performants que les moteurs à balais ? Les moteurs sans balais offrent efficacité et durabilité, grâce à leur commutation électronique qui réduit les frottements et l'usure. En revanche, les moteurs à balais, bien que plus simples et...
Vous êtes-vous déjà demandé qui alimente les machines qui font fonctionner notre monde ? Dans cet article de blog, nous vous présentons les principaux fabricants de compresseurs qui stimulent l'innovation et...
Dans le monde en constante évolution de l'automatisation industrielle, les servomoteurs sont les héros méconnus de la précision et de l'efficacité. Mais avec les innombrables fabricants qui se disputent l'attention, comment savoir lesquels...
Comment les moteurs électriques convertissent-ils l'électricité en mouvement ? Imaginez un monde où près de la moitié de l'énergie que nous consommons est fournie par ces moteurs. Cet article se penche sur la science des moteurs électriques, expliquant...
Imaginez le monde sans le ronronnement des moteurs : pas de voitures, pas d'appareils électroménagers, pas de machines industrielles. Les moteurs convertissent l'énergie électrique en énergie mécanique, alimentant tout, des jouets aux géants de la fabrication. Dans ce...
Qu'est-ce qui distingue les servomoteurs des moteurs pas à pas et les rend pourtant essentiels dans les machines modernes ? Cet article explore leurs différences fondamentales, leurs avantages et leurs applications spécifiques. En lisant cet article, vous comprendrez...
Quel type de questions peut vous aider à réussir un entretien en génie mécanique ? Cet article présente les 20 questions les plus importantes qui mettent à l'épreuve divers aspects de l'ingénierie mécanique, des systèmes de transmission...
Vous êtes-vous déjà demandé comment les trains pouvaient flotter au-dessus des rails ou comment les robots pouvaient effectuer des mouvements précis ? Cet article dévoile le monde fascinant des moteurs linéaires, en expliquant leurs principes, leurs types et leurs avantages uniques. ....
Faites passer votre entreprise à la vitesse supérieure