Conception optimale du mécanisme d'entraînement de la came : Points clés à prendre en compte
Comment un simple système de came et de suiveur peut-il conduire à un mouvement efficace et précis dans des machines complexes ? Cet article explore les subtilités de la conception des mécanismes d'entraînement à cames, en expliquant les différents types de cames et de galets, leurs trajectoires de mouvement et la manière d'obtenir des performances optimales. Des composants de base aux méthodes de conception avancées, les lecteurs obtiendront des informations précieuses sur la création de systèmes à cames hautement efficaces. Vous y trouverez des conseils pratiques et des analyses détaillées qui vous permettront d'améliorer votre compréhension et l'application des mécanismes à cames dans les projets d'ingénierie.
Composition et classification des mécanismes de came
Le mécanisme de came se compose généralement de deux pièces mobiles, à savoir la came et le suiveur, tous deux fixés au cadre. Le dispositif à cames est très polyvalent et peut générer presque n'importe quel mouvement arbitraire.
Une came peut être définie comme un composant doté d'une surface incurvée ou d'une rainure. En la faisant osciller ou tourner, un autre composant, le suiveur, peut fournir un mouvement prédéfini. La trajectoire du suiveur est généralement limitée à une fente afin d'obtenir un mouvement alternatif.
Si certains mécanismes s'appuient parfois sur leur propre poids lors de la course de retour, d'autres utilisent des ressorts comme force de rappel pour réaliser des mouvements précis. D'autres utilisent des rails de guidage pour se déplacer le long de trajectoires spécifiques.
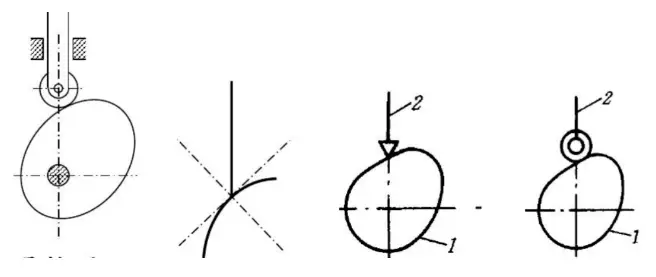
Selon la forme de la came, on distingue trois types : la came à disque, la came mobile et la came cylindrique.
En fonction de leur extrémité, les suiveurs peuvent être divisés en trois types : les suiveurs pointus, les suiveurs à rouleaux et les suiveurs à fond plat.
Types de mécanismes à cames (a) Suiveur à pointe ; (b) Suiveur à rouleau : (c) Suiveur à fond plat
En raison du contact ponctuel entre le suiveur à bec effilé et la came, qui entraîne des contraintes élevées et une usure rapide, il n'est pas adapté aux mécanismes à cames à faible vitesse avec un impact important. Le galet suiveur permet de remédier à ces inconvénients.
Afin d'améliorer l'efficacité de la transmission, nous pouvons également introduire un suiveur à fond plat qui est perpendiculaire à la direction de la force sur la surface inférieure.
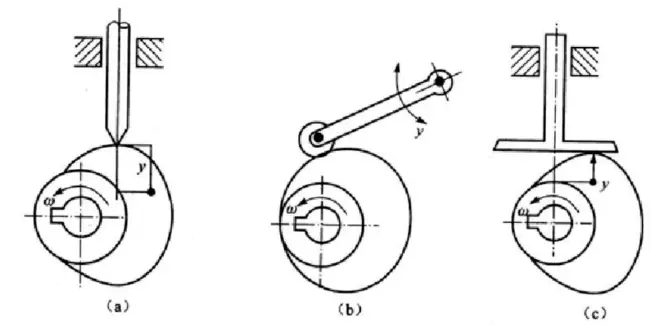
Les éléments de transmission que nous avons examinés précédemment se présentent sous la forme d'un mouvement rectiligne, mais ils peuvent également se présenter sous la forme d'un mouvement oscillant. Dans le premier cas, on parle de suiveur à action directe et dans le second, de suiveur oscillant.
Nous pouvons également faire en sorte que le centre de rotation de la came ne se trouve pas sur la trajectoire linéaire du mouvement du suiveur. Dans ce cas, nous parlons de décalage. De même, si le centre de rotation se trouve sur la trajectoire linéaire du mouvement du suiveur, nous pouvons parler d'un mouvement concentrique.
En outre, nous pouvons également envisager des méthodes pour maintenir des relations de verrouillage à forte contrainte et diviser le mécanisme en verrouillage géométrique et verrouillage par la force.
En combinant la forme de la came, l'extrémité du suiveur et les schémas de mouvement du suiveur, nous pouvons déterminer le nom du mécanisme conçu, par exemple : la came à disque avec un suiveur à bec effilé à action directe (position relative suiveur-came + extrémité du suiveur + schéma de mouvement du suiveur + forme de la came).
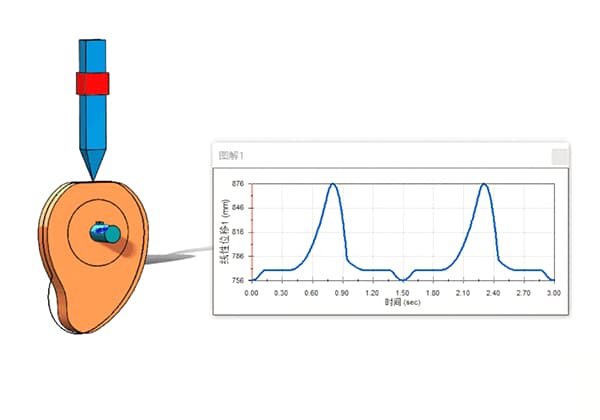
Le processus de mouvement des mécanismes à cames
Mécanisme à cames
Tout d'abord, nous avons une came sur laquelle est placé un suiveur. Lorsque la came tourne à une vitesse angulaire ω de φs degrés, le suiveur ne bouge pas. À ce moment, nous appelons φs l'angle d'arrêt, et le cercle correspondant est appelé cercle de base. De même, le rayon de ce cercle est appelé rayon du cercle de base r0.
Ensuite, en continuant à faire tourner la came à une vitesse angulaire ω de φ degrés, le suiveur s'élève de h. À ce moment-là, nous appelons φ l'angle de course, et h la course.
Plus tard, lorsque le suiveur atteint le point h, nous le laissons en place pendant un certain temps. Pendant ce temps, la came tourne de φs', ce qui correspond à l'angle de levée.
Enfin, nous devons ramener le suiveur à sa position initiale, nous faisons donc tourner la came de φ'. À ce moment-là, le suiveur revient au point de départ. Nous appelons φ' l'angle de retour.
Comment concevoir un mécanisme à cames?
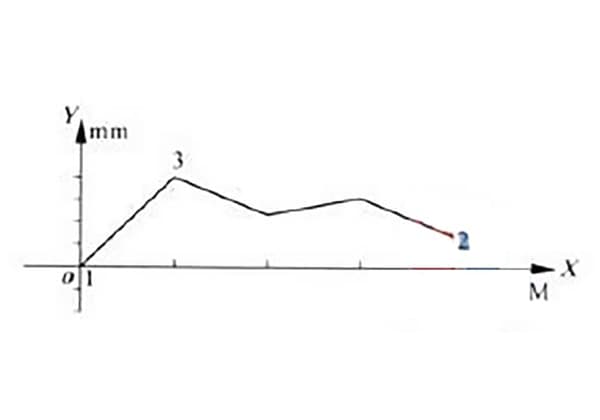
Il existe deux méthodes principales pour concevoir des mécanismes à cames : la méthode graphique et la méthode analytique.
La première est relativement simple : il suffit de fournir le diagramme de mouvement de poussée souhaité, puis d'obtenir la courbe de contour correspondante sur la base de la relation angle-processus fournie par le diagramme.
La précision n'est pas très élevée. La seconde est calculée, et son calcul est relativement complexe, ce qui convient à la conception de mécanismes à cames ayant des exigences élevées en matière de précision.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Vous êtes-vous déjà demandé comment configurer un servo-pilote pour obtenir des performances optimales ? Ce guide couvre tout ce que vous devez savoir sur le réglage des paramètres de gain, du contrôle de la position à la régulation de la vitesse....
Comment éviter que vos moules ne se fissurent pendant le traitement thermique ? Cet article se penche sur le processus complexe du traitement thermique des moules, en soulignant les défauts courants tels que les fissures de trempe et les...
Avez-vous déjà réfléchi à la précision requise pour le serrage des boulons de brides ? Une technique appropriée peut prévenir les fuites et garantir la sécurité dans les systèmes à haute pression. Cet article présente les méthodes essentielles pour...
Comment mesurer la rectitude d'un rail de guidage pour garantir la précision des opérations de la machine ? Cet article explore deux méthodes courantes : la méthode de connexion des deux points d'extrémité et la condition minimale...
Comment les machines de polissage permettent-elles d'obtenir une finition parfaite sur les surfaces métalliques ? Dans cet article, nous explorons les mécanismes complexes de ces outils essentiels. Depuis les composants impliqués jusqu'à la...
Cet article plonge dans le monde fascinant de la production de pièces moulées, révélant le processus étape par étape qui transforme les matières premières en composants essentiels. Découvrez les techniques, les matériaux et les contrôles de qualité impliqués,...
Imaginez que vous produisiez chaque jour des milliers de pièces plastiques complexes avec une précision et une rapidité extrêmes. Le moulage par injection, une technique de fabrication transformatrice, rend cela possible en injectant de la matière fondue dans des moules pour...
Imaginez qu'une simple surface en verre vous permette d'accéder à la précision des machines-outils. C'est exactement ce que font les échelles à réseaux linéaires, qui transforment les lignes fines en mesures extrêmement précises. Cet article explore comment ces...
Vous êtes-vous déjà demandé comment les engrenages de votre voiture ou de votre avion fonctionnaient si bien ? Cet article dévoile les principaux fabricants d'engrenages qui façonnent l'avenir de l'ingénierie mécanique. Vous apprendrez...
Faites passer votre entreprise à la vitesse supérieure