La machine à mesurer tridimensionnelle (MMT) est un instrument de mesure de précision utilisé dans diverses industries. Elle est équipée de freins à air et de dispositifs de micromouvement sur ses trois axes, ce qui permet une transmission précise de chaque axe. De plus, la MMT est équipée d'un système d'acquisition de données performant pour garantir la précision des mesures.
La MMT est couramment utilisée pour la conception de produits, l'équipement de moules, les mesures d'engrenages et de lames, la fabrication de machines, les fixations d'outils, les pièces de moules à vapeur, l'équipement électronique et électrique, et d'autres mesures de précision.
1. Présentation de l'instrument
La machine à mesurer tridimensionnelle (MMT), également connue sous le nom d'instrument de mesure tridimensionnelle, est un appareil de métrologie de précision utilisé pour mesurer les dimensions géométriques, les formes et les relations spatiales dans un système de coordonnées tridimensionnelles. Elle fonctionne à l'aide d'un palpeur qui peut se déplacer le long de trois axes orthogonaux (X, Y et Z) avec une grande précision.
Le palpeur peut soit entrer en contact physique avec la pièce à usiner (palpeurs à contact ou à balayage), soit effectuer des mesures sans contact (systèmes laser ou de vision). Le système de mesure du déplacement pour chaque axe, qui utilise généralement des codeurs linéaires de haute précision ou des échelles optiques, transmet les données à un système informatique sophistiqué. Ce système traite les points collectés (x, y, z) pour calculer diverses caractéristiques géométriques, dimensions et caractéristiques de forme de la pièce.
Les MMT sont capables de mesurer de multiples aspects de la qualité des pièces, notamment
- Précision dimensionnelle : Mesures linéaires et angulaires
- Précision du positionnement : relations spatiales entre les caractéristiques
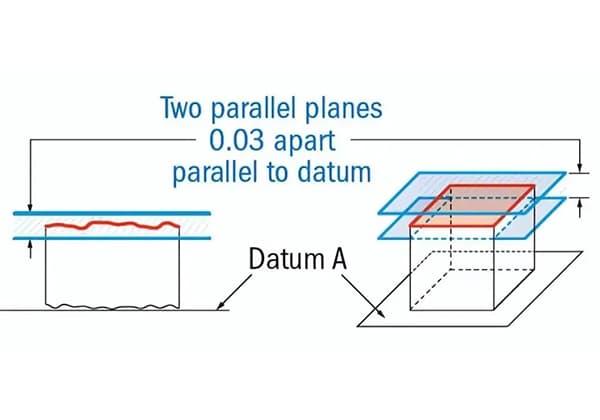
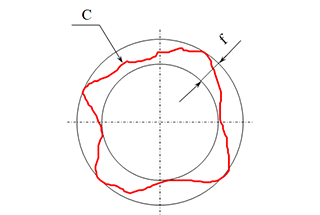
- Précision géométrique : Tolérances de forme et d'orientation (planéité, cylindricité, etc.)
- Précision des contours : Profils de surface complexes et formes libres
Cet instrument polyvalent est essentiel pour garantir la précision et l'exactitude dans diverses industries, notamment l'automobile, l'aérospatiale et la fabrication de pointe.
Spécifications du modèle :
Structure : Construction en granit à trois axes avec une conception de pont mobile de style allemand, avec une enceinte à quatre côtés pour une meilleure stabilité.
Système d'entraînement : Servomoteurs à courant continu couplés à des paliers à air de haute précision préchargés pour un mouvement souple et sans frottement.
Système de mesure : Codeurs linéaires ouverts RENISHAW avec une résolution de 0,1 μm (100 nm).
Système de sonde : Contrôleur et tête de sonde Renishaw, garantissant la compatibilité et des capacités de mesure de haute performance.
Base : Plaque de surface en granit de haute précision (grade 00), fournissant une surface de référence stable.
Exigences environnementales :
- Température : 20°C ± 2°C
- Humidité : 40% - 70% RH
- Gradient de température : ≤ 1°C/m
- Taux de variation de la température : ≤ 1°C/h
Exigences pneumatiques :
- Pression atmosphérique : 0,4 MPa - 0,6 MPa
- Débit d'air : 25 L/min
Spécifications de performance :
- Précision de la mesure de la longueur (MPEE) : ≤ (2,1 + L/350) μm, où L est la longueur mesurée en mm.
- Erreur de sondage (MPEP) : ≤ 2,1 μm
Caractéristiques principales :
La machine utilise des rails de guidage en granit naturel pour les trois axes, ce qui garantit une stabilité thermodynamique supérieure dans l'ensemble de la structure. Ce choix de conception élimine les erreurs de précision qui pourraient résulter d'une dilatation thermique différentielle entre les matériaux, comme cela pourrait se produire dans les machines utilisant des matériaux mixtes pour les différents axes. Les caractéristiques thermiques uniformes du granit contribuent à des performances constantes dans des conditions environnementales et des durées de mesure variables.
Comparaison entre le granit et l'alliage d'aluminium d'aviation
Les matériaux en alliage d'aluminium présentent un coefficient de dilatation thermique nettement plus élevé que le granit. Cette propriété inhérente peut entraîner une instabilité dimensionnelle dans les équipements de précision.
Dans les machines à mesurer tridimensionnelles (MMT), les composants tels que les poutres et les structures de l'axe z fabriqués à partir d'alliages d'aluminium de qualité aéronautique sont susceptibles de subir des modifications dimensionnelles et une dérive de la précision au fil du temps, en particulier en cas d'utilisation prolongée et de cycles thermiques.
En revanche, les MMT haut de gamme utilisent souvent le granit pour les composants structurels critiques. La plate-forme du système à trois coordonnées et l'axe principal sont généralement construits à partir de blocs de granit rectifiés avec précision. Ce choix de matériau offre une stabilité thermique et des caractéristiques d'amortissement des vibrations supérieures.
L'arbre principal est fabriqué en granit, tandis que la poutre et l'axe z peuvent incorporer une conception hybride utilisant des alliages d'aluminium et d'autres matériaux pour optimiser le poids et la rigidité. Cependant, cette combinaison de matériaux ayant des coefficients de dilatation thermique différents peut potentiellement introduire des erreurs de mesure et des problèmes de stabilité lorsqu'ils sont soumis à des fluctuations de température.
Pour atténuer ces difficultés, les MMT de pointe utilisent une structure rectangulaire entièrement en granit pour le système de guidage à trois axes. Cette conception est complétée par des roulements à air précontraint autonettoyants de haute précision. La structure monolithique en granit garantit la stabilité dimensionnelle et la précision des mesures à long terme.
Les paliers à air assurent une distribution stable et équilibrée de la force dans le sens axial, ce qui réduit considérablement l'usure et contribue à la longévité des composants critiques de la machine. Cette conception minimise également les effets de friction et de glissement, améliorant ainsi la répétabilité des mesures.
Une technologie brevetée de sortie d'air par petits trous est mise en œuvre, avec un taux de consommation d'air optimisé de 30L/min. Cette innovation crée un effet de condensation localisé dans le jeu du roulement, ce qui permet de contrer efficacement la chaleur générée par le frottement résiduel du roulement et d'améliorer la stabilité thermique globale de l'équipement.
Le principe physique sous-jacent s'appuie sur le comportement du gaz passant à travers un orifice circulaire sous pression. Alors que la sagesse conventionnelle suggère que ce processus génère une chaleur de friction, qui peut être préjudiciable aux mesures de haute précision, la conception des petits orifices induit un phénomène unique. Lorsque le diamètre du trou de sortie est réduit en dessous d'un seuil critique, un effet de condensation se produit à proximité immédiate de l'orifice. Ce refroidissement localisé compense efficacement la chaleur minimale générée par le frottement de l'air pendant les opérations de mesure.
En exploitant ce principe physique par la mise en œuvre d'une technologie de sortie de gaz à petit trou, la MMT peut maintenir une stabilité de température exceptionnelle sur de longues périodes. Cette stratégie de gestion thermique est cruciale pour garantir une précision et une fiabilité constantes des mesures dans les applications de métrologie de précision.
Comparaison des roulements de MMT des principaux fournisseurs
Les trois axes intègrent les règles optiques plaquées or haut de gamme de Renishaw, offrant une résolution exceptionnelle de 0,1μm (micromètres). Ce système de codage linéaire de haute précision garantit un retour de position précis et des capacités de mesure.
La conception du montage de la balance utilise une configuration sans fixation, avec une extrémité solidement ancrée et l'autre pouvant flotter. Cette disposition compense efficacement la dilatation et la contraction thermiques, minimisant ainsi les erreurs de mesure dues aux fluctuations de la température ambiante.
Le système de mouvement utilise une conception cinématique de pointe qui découple les forces d'entraînement des surfaces de roulement. Cette approche avancée élimine les contraintes induites sur les rails de guidage, maximisant à la fois la précision des mesures et la stabilité mécanique à long terme.
Pour l'entraînement des axes, un système de transmission par courroie synchrone renforcée en acier est utilisé. Cette conception offre des caractéristiques supérieures d'amortissement des vibrations lors des déplacements rapides, tout en offrant une grande résistance à la traction, une excellente vitesse de positionnement et une durée de vie opérationnelle prolongée.
La MMT fonctionne avec le logiciel Rational-DMIS, un progiciel de métrologie de pointe certifié par le Physikalisch-Technische Bundesanstalt (PTB). Cette plate-forme logicielle à la fois puissante et intuitive permet aux utilisateurs de se concentrer sur les tâches de mesure plutôt que sur une programmation complexe, ce qui rationalise le processus d'inspection.
2. Composants de base de la MMC
Faisceau X :
Incorpore une technologie avancée de faisceau incliné de précision, améliorant la rigidité structurelle et minimisant la déformation thermique pour une meilleure précision de mesure.
Rail de guidage en Y :
Il est doté d'une structure de positionnement exclusive avec des rainures inférieures en queue d'aronde directement usinées dans l'établi, garantissant un alignement supérieur et réduisant les erreurs d'assemblage.
Système de rail de guidage :
Utilise des paliers à air de haute précision, autonettoyants et préchargés, comprenant des rails de guidage flottants à air à pression statique dans quatre directions. Cette conception minimise les frottements, améliore la fluidité des mouvements et maintient une précision constante dans le temps.
Système d'entraînement :
Met en œuvre des servomoteurs à courant continu à hautes performances couplés à des mécanismes d'entraînement flexibles à courroie crantée synchrone. Chaque axe est contrôlé électroniquement et limité mécaniquement, ce qui permet une transmission rapide, de meilleures performances de mouvement et une précision de positionnement accrue.
Broche de l'axe Z :
Intègre un dispositif d'équilibrage pneumatique réglable, qui améliore considérablement la précision du positionnement et la répétabilité des mesures de l'axe z. Cette fonction compense les variations de poids de la sonde et garantit une force de contact constante. Ce dispositif compense les variations de poids de la sonde et assure une force de contact constante.
Système de contrôle :
Utilise un système de contrôle spécialisé importé avancé à deux ordinateurs et trois coordonnées, permettant un traitement parallèle et une redondance pour une fiabilité et des performances accrues.
Système de machine :
Incorpore la technologie de correction d'erreur 3D assistée par ordinateur (CAA), garantissant la stabilité à long terme et la haute précision du système. Cette technologie adaptative compense les erreurs géométriques et les variations thermiques en temps réel.
Logiciel de mesure :
Utilise le logiciel de mesure 3D-DMIS, qui offre une gamme complète de fonctions de mesure, des capacités avancées d'analyse des données et une intégration en ligne transparente avec les systèmes CAO/FAO pour des processus d'inspection efficaces.
3. Principe fonctionnel de la MMC
Une machine à mesurer tridimensionnelle (MMT) est un instrument de métrologie de précision conçu pour mesurer les caractéristiques géométriques d'objets avec une grande exactitude. Elle se compose de trois éléments principaux : un mécanisme de guidage, des éléments de mesure de la longueur et des dispositifs d'affichage numérique, tous alignés le long de trois axes perpendiculaires entre eux (X, Y et Z). Le système comprend également une table de travail pour soutenir l'objet mesuré, bien que la taille de cette table puisse varier en fonction des applications prévues pour la MMT.
La tête de mesure, souvent équipée d'un palpeur à contact ou d'un capteur optique, peut être déplacée vers des points de mesure spécifiques, soit manuellement, soit au moyen d'une motorisation commandée par ordinateur. Lorsque le palpeur entre en contact avec la pièce (ou saisit les données optiquement), il génère un signal de déclenchement. Simultanément, des codeurs linéaires de haute précision (généralement des règles optiques ou des règles en verre) situés le long de chaque axe mesurent la position exacte de la pointe du palpeur dans l'espace 3D.
La fonctionnalité principale d'une MMT réside dans sa capacité à déterminer et à afficher avec précision les coordonnées spatiales de n'importe quel point de son volume de mesure. Ce résultat est obtenu grâce à une intégration sophistiquée de la précision mécanique, de la technologie des capteurs et du traitement des données :
- Interaction avec le palpeur : Lorsque le palpeur entre en contact avec la pièce (ou capture des données optiquement), il envoie un signal de point d'échantillonnage au système de contrôle de la MMT.
- Lecture de la position : Le système de commande enregistre instantanément la position actuelle de la pointe de la sonde par rapport à l'origine de la machine (point 0,0,0) en lisant les valeurs des encodeurs linéaires sur chaque axe.
- Traitement des données : Le système informatique de la MMT traite ces valeurs brutes de coordonnées, en appliquant diverses compensations (par exemple, les décalages d'étalonnage de la sonde, la compensation de la température) pour garantir la précision.
- Affichage et analyse : Les données de coordonnées traitées sont ensuite affichées sur l'interface de la MMT et peuvent être utilisées à diverses fins d'analyse, telles que les mesures dimensionnelles, le tolérancement géométrique ou la comparaison avec des modèles CAO.
Les MMT modernes intègrent souvent des fonctions avancées qui vont au-delà de ce principe de base, notamment
- Systèmes de compensation de la température pour tenir compte de la dilatation thermique de la machine et de la pièce à usiner
- Paliers à air pour un mouvement doux et sans friction de la tête de mesure
- Systèmes automatisés de changement de sonde pour une plus grande flexibilité dans les tâches de mesure
- Logiciel avancé pour l'analyse de géométries complexes, l'évaluation GD&T et la comparaison CAO
Bien que cela décrive le fonctionnement fondamental d'une MMT, il est important de noter que la technologie continue d'évoluer, avec des développements dans des domaines tels que la mesure sans contact, les systèmes multi-capteurs et l'intégration avec les concepts de l'industrie 4.0 qui élargissent encore les capacités et les applications de ces outils de métrologie cruciaux.
4. Classification de la MMC
Selon la structure du MMC, il peut être divisé en plusieurs catégories :
1. Type de pont mobile
La machine à mesurer tridimensionnelle (MMT) la plus couramment utilisée est la machine à pont mobile.
L'axe, l'arbre principal qui se déplace dans le sens vertical, est guidé par un cadre en forme de boîte pour se déplacer le long de la poutre horizontale.
La poutre horizontale, qui est perpendiculaire à l'axe, est soutenue aux deux extrémités par deux colonnes, formant ainsi un "pont". Le pont se déplace le long de deux rainures de guidage perpendiculaires à l'axe sur le plan horizontal.
Grâce au support fourni par les jambes de force aux deux extrémités de la poutre, le type de pont mobile a une déflexion minimale plus faible et une plus grande précision que le type de cantilever.
2. Type de lit de pont
Dans le type de lit en pont, l'arbre principal se déplace dans le sens vertical et est guidé par un cadre en forme de boîte pour se déplacer le long de la poutre de l'axe vertical. La poutre se déplace le long de deux rails de guidage horizontaux dans la direction axiale, qui sont situés sur la surface supérieure des piliers fixés sur le corps de la machine.
Ce type de pont est similaire au pont mobile, car les deux extrémités de la poutre sont soutenues, ce qui entraîne une déviation minimale de la poutre et une plus grande précision par rapport au type de cantilever.
En outre, seule la poutre se déplace dans le sens axial, ce qui réduit l'inertie globale et facilite l'opération manuelle par rapport au type de pont mobile.
3. Type de portique
Le portique, également connu sous le nom de portique au sol ou portique à porte, se distingue du portique à lit par le fait qu'il est directement fixé au sol.
Ce type de structure offre une plus grande rigidité et une plus grande stabilité que le pont de type lit et est couramment utilisé dans les grands instruments de mesure à trois coordonnées.
Chaque arbre est entraîné par un moteur, ce qui permet une grande plage de mesure. L'opérateur peut également travailler à l'intérieur de la structure du pont.
4. Type de pont fixe
Le type de pont fixe comprend un arbre principal qui se déplace dans la direction verticale et qui est guidé par un cadre en forme de boîte pour se déplacer le long de la poutre horizontale de l'axe vertical.
Le pont, ou pilier, est fixé sur le corps de la machine, tandis que la table de mesure se déplace le long du rail de guidage du plan horizontal, qui est perpendiculaire à l'axe, dans la direction axiale.
Chaque arbre est actionné par un moteur pour maintenir la précision de la position. Toutefois, ce modèle n'est pas conçu pour une utilisation manuelle.
5. Type de pont en L
Le pont en forme de L est conçu pour réduire l'inertie du pont lorsque l'arbre se déplace.
Par rapport au type de pont mobile, cette conception présente moins d'inertie dans ses composants mobiles, ce qui la rend plus facile à utiliser. Cependant, il présente un niveau de rigidité plus faible.
6. Table fixe à bras en porte-à-faux
Le type de porte-à-faux mobile comprend un arbre principal qui se déplace dans la direction verticale et qui est guidé par un cadre en forme de boîte pour se déplacer le long de la poutre en porte-à-faux horizontale de l'axe vertical dans la direction axiale. La poutre en porte-à-faux se déplace le long d'une rainure de guidage sur le plan horizontal, qui est perpendiculaire à l'arbre.
Ce type de structure est ouvert sur trois côtés et est pratique pour l'assemblage et le désassemblage des pièces à usiner, car elles peuvent s'étendre au-delà de la table. Toutefois, la précision est moindre en raison de la conception en porte-à-faux.
7. Type mobile à colonne unique
Le type mobile à un seul pilier comporte un arbre principal qui se déplace dans le sens vertical, et l'ensemble du pilier se déplace le long de la rainure de guidage du plan horizontal, qui est perpendiculaire à l'arbre, relié à l'arbre.
La table de mesure se déplace dans la direction axiale le long de la rainure de guidage du plan horizontal, qui est perpendiculaire à l'axe.
Ce type de structure se caractérise par une bonne rigidité de la table de mesure et du pilier, ce qui entraîne une déformation minimale. En outre, l'échelle linéaire de chaque axe est positionnée à proximité de l'axe de mesure, ce qui garantit le respect du théorème d'Abbe.
8. Type de tableau xy à une colonne
La table de mesure à un seul pilier est de type mobile, avec un arbre principal qui se déplace dans le sens vertical.
Le pilier est équipé d'une rainure de guidage de l'arbre et est fixé au corps de l'instrument de mesure.
Pendant la mesure, la table de mesure se déplace le long de l'axe en direction du plan horizontal.
9. Table mobile à bras horizontal
La table de mesure à bras horizontal est de type mobile, avec un cadre qui soutient le bras horizontal pour qu'il se déplace dans la direction verticale (axe) le long du pilier vertical. La sonde est fixée au cantilever dans le sens horizontal.
Le pilier se déplace dans le sens axial le long de la rainure de guidage dans le plan horizontal, qui est perpendiculaire à l'axe. La table de mesure se déplace également dans le sens axial le long de la rainure de guidage dans le plan horizontal, qui est perpendiculaire à l'axe et à l'axe.
Cette conception est une amélioration du type de cantilever horizontal, car elle élimine la déflexion causée par l'extension ou la rétraction du bras horizontal dans la direction axiale.
10. Table fixe à bras horizontal
La plate-forme de mesure à bras horizontal est de type fixe et a une structure similaire à celle du type mobile.
La table de mesure est fixe et les axes X, Y et Z se déplacent le long de la rainure de guidage. Pendant la mesure, le pilier se déplace dans la rainure de guidage de l'arbre, tandis que la table coulissante fixée à l'arbre se déplace dans la direction de l'axe vertical.
11. Type à bras horizontal mobile
Le type de déplacement à bras horizontal comprend un arbre en porte-à-faux qui se déplace dans la direction horizontale et un cadre qui supporte le bras horizontal et se déplace le long de la colonne dans la direction axiale. La colonne est perpendiculaire à l'axe.
Le pilier se déplace dans la direction axiale le long de la rainure de guidage du plan horizontal, qui est perpendiculaire à l'axe, ce qui le rend impropre aux mesures de haute précision, à moins que le bras horizontal ne soit étendu ou rétracté pour compenser les erreurs causées par le poids.
Ce type de structure est principalement utilisé pour l'inspection des véhicules.
12. Type de pont en anneau
Le type de pont à boucle fermée est connu pour sa stabilité, car le mécanisme d'entraînement est situé au centre de l'établi. Cette conception permet de réduire l'impact causé par le mouvement du pont, ce qui en fait l'instrument le plus stable parmi tous les instruments de mesure à trois coordonnées.
5. Principaux avantages
- Alliage d'aluminium d'aviation anodisé en surface ;
- Palier à air autonettoyant de haute précision ;
- Règle à grille de haute précision importée d'Europe ;
- Technologie brevetée de faisceau triangulaire de précision.
6. Champs d'application
Le type de pont à boucle fermée est largement utilisé dans une variété d'industries, y compris l'automobile, l'électronique, la machinerie, l'aviation et le militaire, pour la mesure de divers objets tels que les boîtes, les cadres, les engrenages, les cames, les roues à vis sans fin, les vis sans fin, les lames, les courbes, les surfaces incurvées, la quincaillerie, les plastiques, et plus encore. Il est également couramment utilisé dans l'industrie des moules.
7. Méthode d'utilisation
Les machines à mesurer tridimensionnelles (MMT) sont généralement classées en trois catégories : les mesures avec contact, les mesures sans contact et les mesures combinées avec et sans contact.
La mesure par contact est une méthode couramment utilisée pour mesurer les produits usinés, les produits emboutis et les films métalliques. La numérisation de points de données sur la surface de l'objet mesuré à l'aide d'une MMT est souvent nécessaire pour analyser les données de traitement ou à des fins de rétroconception.
En prenant l'exemple de la MMT Foundation-Pro, cet article décrit les différentes méthodes de balayage et étapes d'utilisation des MMT.
L'opération de scanning d'une MMT consiste à collecter des points de données dans une zone spécifique de la surface de l'objet à mesurer à l'aide du programme PC DMIS. Cette zone peut être une ligne, une tache, une section de la pièce, une courbe de la pièce ou une circonférence à une certaine distance du bord.
Le type de balayage dépend du mode de mesure, du type de sonde et de la disponibilité des fichiers CAO. L'option "scan" sur l'écran de contrôle est déterminée par le bouton d'état (manuel/DCC).
Si la méthode DCC est utilisée pour la mesure et que des fichiers CAO sont disponibles, les méthodes de numérisation disponibles sont "ligne ouverte", "ligne fermée", "patch", "section" et "périmètre". Si seuls des fichiers CAO filaires sont disponibles, les méthodes de numérisation disponibles sont "ligne ouverte", "ligne fermée" et "patch".
Si le mode de mesure manuel est utilisé, seul le mode de base "scan manuel TTP" est disponible. Si la mesure manuelle est utilisée avec une sonde rigide, les options disponibles sont le delta fixe, le delta variable, le delta temporel et le balayage de l'axe du corps.
Cet article fournit une explication détaillée des cinq modes de balayage qui peuvent être sélectionnés lorsque l'on entre dans le menu "utilitaire" et que l'on sélectionne l'option "balayage" sous l'état DCC.
1. le balayage linéaire ouvert
Le balayage en ligne ouverte est le mode de balayage le plus simple. La sonde part du point de départ, balaie le long d'une direction donnée avec un pas prédéterminé et se termine au point d'arrivée.
La numérisation en ligne ouverte peut être divisée en deux cas en fonction de la disponibilité d'un modèle CAO.
(1) Sans modèle CAO :
Si la pièce mesurée n'a pas de modèle CAO, saisissez d'abord les valeurs nominales des points limites. Ouvrez l'option "point limite" dans la boîte de dialogue, cliquez sur "1" pour saisir les données du point de départ. Ensuite, double-cliquez sur "d" pour saisir les nouvelles valeurs de coordonnées X, Y et Z du point de direction (le point de coordonnées indiquant la direction du balayage). Enfin, double-cliquez sur "2" pour saisir les données du point final.
Saisissez ensuite la taille du pas. Saisissez une nouvelle valeur de longueur de pas dans la colonne "Max Inc" de la colonne "Direction 1 Tech" de la boîte de dialogue de numérisation. Enfin, vérifiez que le vecteur de direction défini est correct. Il définit le vecteur normal de la surface du premier point de mesure après le début du balayage, la section transversale et le vecteur normal de la surface du dernier point avant la fin du balayage. Cliquez sur "créer" une fois que toutes les données ont été saisies.
(2) Avec le modèle CAO :
Si la pièce mesurée possède un modèle CAO, cliquez sur la surface correspondante du modèle CAO avec le bouton gauche de la souris au début du balayage, et le programme PC DMIS générera un point sur le modèle CAO et le marquera comme "1", le point de départ. Cliquez ensuite sur le point suivant pour définir la direction du balayage. Enfin, cliquez sur le point final (ou point limite) et marquez-le comme "2". Reliez la ligne entre "1" et "2".
Pour chaque point sélectionné, le programme PC DMIS entrera la valeur de la coordonnée correspondante et le vecteur dans la boîte de dialogue. Après avoir déterminé la taille du pas et d'autres options (telles que plan de sécurité, point unique, etc.), cliquez sur "mesurer", puis sur "créer".
2. Balayage linéaire fermé
Le mode de numérisation en ligne fermée permet de numériser la surface intérieure ou extérieure d'une pièce. Il ne nécessite que deux valeurs, le "point de départ" et le "point de direction" (le PC DMIS considère le point de départ comme le point d'arrivée).
(1) Opération de saisie des données :
Double-cliquez sur le point limite "1" pour saisir sa position dans la boîte de dialogue d'édition. Double-cliquez sur le point de direction "d" pour entrer sa valeur de coordonnées. Sélectionnez le type de balayage ("linéaire" ou "variable"), entrez la taille du pas et définissez le type de contact ("vecteur", "surface" ou "bord").
Double-cliquez sur le "vecteur initial" et entrez le vecteur au point "1". Vérifiez le vecteur de section. Après avoir saisi les autres options, cliquez sur "créer".
Vous pouvez également toucher le premier point de mesure sur la surface de la pièce à l'aide du panneau de commande de la machine à mesurer tridimensionnelle, puis toucher le point de direction. Le programme PC DMIS introduira automatiquement la valeur mesurée dans la boîte de dialogue et calculera le vecteur initial.
Après avoir sélectionné le mode de contrôle du balayage, le type de point de mesure et d'autres options, cliquez sur "créer".
(2) Numérisation en ligne fermée avec modèle CAO :
Si la pièce mesurée possède un modèle CAO, confirmez le "balayage à ligne fermée" avant de procéder à la mesure. Tout d'abord, cliquez sur le point de départ de la surface pour générer le symbole "1" sur le modèle CAO (lorsque vous cliquez, la surface et les points limites sont mis en surbrillance pour vous aider à sélectionner la surface correcte). Cliquez ensuite sur le point de direction du balayage.
PC DMIS fournira les coordonnées et les vecteurs correspondants aux points sélectionnés dans la boîte de dialogue. Après avoir sélectionné la méthode de contrôle du balayage, la taille du pas et d'autres options, cliquez sur "créer".
3. Analyse des correctifs
Le mode de balayage de patch vous permet de balayer une zone plutôt qu'une seule ligne de balayage.
Cette méthode de numérisation nécessite au moins quatre informations sur les points limites, notamment le point de départ, le point de direction, la longueur de numérisation et la largeur de numérisation.
Le PC DMIS peut calculer le patch triangulaire sur la base des points limites 1, 2 et 3, qui sont définis par les informations de base ou par défaut. La direction du balayage est déterminée par la valeur des coordonnées du point D.
Si vous ajoutez un quatrième ou un cinquième point de délimitation, le patch peut avoir une forme carrée ou pentagonale.
Lors de l'utilisation de la méthode de balayage de patchs, veillez à sélectionner "Balayage de lignes fermées" dans la case à cocher pour balayer des éléments fermés tels que des cylindres, des cônes, des rainures, etc. Saisissez ensuite le point de départ, le point d'arrivée et le point de direction.
La position du point final représente la distance vers le haut ou vers le bas parcourue pendant le balayage de l'élément mesuré.
Le vecteur du plan de coupe peut être défini par le point de départ, le point de direction et le vecteur de départ (qui est généralement parallèle à l'élément mesuré).
Trois méthodes de définition du balayage de patchs sont présentées, en prenant pour exemple la création de patchs quadrilatéraux :
(1) Entrée de la valeur des coordonnées :
- Double-cliquez sur le point limite "1" et saisissez les valeurs des coordonnées X, Y et Z du point de départ.
- Double-cliquez sur le point de repère "d" et saisissez la valeur de la coordonnée du point de repère de balayage.
- Double-cliquez sur le point limite "2" et entrez la largeur de balayage pour définir la première direction.
- Double-cliquez sur le point limite "3" et entrez la largeur de balayage pour définir la deuxième direction.
- Cliquez sur "3", puis appuyez sur le bouton "Ajouter" pour afficher le quatrième point de délimitation dans la boîte de dialogue.
- Double-cliquez sur le point limite "4" et saisissez la valeur de la coordonnée du point final.
- Après avoir défini la taille de pas et la taille de pas maximale requise pour la numérisation, cliquez sur "Créer".
(2) Mode de test tactile :
- Sélectionnez le mode "Patch Scanning" et touchez le premier point au point de départ souhaité à l'aide du palpeur de la machine à mesurer tridimensionnelle.
- La valeur des coordonnées de ce point sera affichée dans la rubrique "#1" de la boîte de dialogue "Point limite".
- Touchez le deuxième point, qui représente le point final de la première direction de balayage, et sa valeur de coordonnées sera affichée dans l'élément "d" de la boîte de dialogue.
- Touchez le troisième point, qui représente la largeur du patch scanné, et sa valeur de coordonnées sera affichée dans l'élément "#3" de la boîte de dialogue.
- Cliquez sur "3" et sélectionnez "Ajouter" pour ajouter le quatrième point à la liste.
- Touchez le point final et la boîte de dialogue se ferme.
- Enfin, définissez l'espacement des lignes de balayage et la longueur de pas dans les deux directions.
- Après avoir sélectionné le type de contact de numérisation et les options requises, cliquez sur "Créer".
(3) Mode modèle de surface CAO :
- Cette méthode de numérisation ne s'applique qu'aux pièces dont le modèle de surface a été défini par un logiciel de CAO.
- Sélectionnez le mode "Patch Scanning" et cliquez avec le bouton gauche de la souris sur la surface de travail de la CAO.
- Mettez en surbrillance "1" dans la boîte de dialogue "Point limite" et cliquez avec le bouton gauche de la souris sur le point de départ de la numérisation sur la surface.
- Mettez en surbrillance "d" et cliquez sur la surface pour définir le point de direction.
- Cliquez sur la surface pour définir la largeur de balayage (#2).
- Cliquez sur la surface pour définir la largeur du balayage (#3).
- Cliquez sur "3", sélectionnez "Ajouter", ajoutez le point supplémentaire "4", mettez "4" en surbrillance, cliquez pour définir le point final du balayage et fermez la boîte de dialogue.
- Après avoir défini les étapes dans les deux sens et sélectionné les options nécessaires, cliquez sur "Créer".
4. Analyse de la section
Le mode de numérisation de sections ne s'applique qu'aux pièces dotées d'un modèle de surface CAO.
Il permet de scanner une section spécifique de la pièce.
La section scannée peut être le long de la direction de l'axe X, Y ou Z ou à un angle spécifique avec l'axe des coordonnées.
Il est possible d'effectuer des balayages de sections multiples en définissant la taille du pas.
Vous pouvez définir le point limite du balayage de section dans la boîte de dialogue.
En appuyant sur le bouton de conversion "Cut CAD", vous pouvez localiser des trous dans le modèle de surface CAO et définir sa ligne de démarcation de la même manière que pour la numérisation en ligne ouverte.
Le programme PC DMIS ajustera automatiquement la trajectoire de numérisation pour éviter tout trou dans le modèle de surface CAO.
Pour découper le modèle de surface CAO en surface définie par l'utilisateur, procédez comme suit :
- Saisissez l'option "Point limite".
- Entrez dans la boîte "CAD Element Selection".
- Sélectionnez la surface.
- Sélectionnez l'option "Couper la CAO" sans effacer la case "Sélection des éléments CAO".
À ce stade, le programme PC DMIS découpe la surface sélectionnée pour trouver d'éventuels trous.
Si aucun trou n'est défini dans le modèle de surface CAO, il n'est pas nécessaire de sélectionner l'option "Couper CAO". Dans ce cas, PC DMIS numérise en fonction des points de départ et d'arrivée définis.
Pour les graphiques CAO complexes comportant plusieurs surfaces, les différentes surfaces peuvent être divisées en groupes. Le nombre de groupes est limité aux modèles de surface CAO locaux.
5. Balayage du périmètre
La méthode de balayage du périmètre ne s'applique qu'aux pièces ayant un modèle de surface CAO.
Ce mode de numérisation utilise le modèle mathématique de la CAO pour calculer la trajectoire de numérisation, qui est décalée par rapport à la limite ou au contour extérieur d'une distance sélectionnée par l'utilisateur.
Pour créer un balayage des limites, procédez comme suit :
- Sélectionnez d'abord l'option "Analyse du périmètre".
- S'il s'agit d'un balayage du périmètre interne, sélectionnez "Balayage du périmètre interne" dans la boîte de dialogue.
- Lors de la sélection d'une surface de travail, lancez la case à cocher "Sélectionner", mettez en surbrillance chaque surface sélectionnée et quittez la case à cocher après avoir sélectionné toutes les surfaces souhaitées.
- Cliquez sur la surface pour déterminer le point de départ de la numérisation.
- Cliquez sur la même surface pour déterminer le point de direction du balayage.
- Cliquez sur la surface pour déterminer le point final du balayage. Si aucun point final n'est indiqué, le point de départ sera utilisé comme point final.
- Saisir les valeurs correspondantes dans la boîte d'édition "Scan Structure" (y compris "Value Added", "CAD Tolerance", etc.)
- Sélectionnez l'option "Calculer le périmètre" pour calculer le périmètre de numérisation.
- Après avoir confirmé que la valeur de la déviation est correcte, appuyez sur le bouton "Générer un point de mesure". Le programme PC DMIS calculera automatiquement la valeur théorique du balayage.
- Cliquez sur "Créer".
6. Points d'application
(1) Pour améliorer la précision de l'acquisition des données et l'efficacité des mesures, il est important de choisir le mode de mesure par balayage approprié en fonction des caractéristiques spécifiques et des exigences de modélisation de la pièce à mesurer.
(2) Le serrage La position de la pièce doit être planifiée avec soin pour faciliter le processus de mesure et le déplacement du palpeur. Pour garantir la précision de la modélisation, essayez de disposer le palpeur de manière à ce qu'il effectue des mesures de balayage de tous les objets en même temps lors du serrage de la pièce.
(3) La sélection des points de mesure du balayage doit inclure des points clés de l'information géométrique du contour de la pièce et des points de mesure doivent être ajoutés de manière appropriée aux parties présentant des changements de courbure significatifs.
8. Gestion des données
1. Conversion des données
Tâches et exigences pour la conversion des données :
(1) Convertir le format des données de mesure au format IGES reconnu par les logiciels de CAO et l'enregistrer sous un nom de produit ou un nom spécifié par l'utilisateur après l'avoir combiné.
(2) Les données ayant des produits différents, des attributs différents et des positionnements différents susceptibles de prêter à confusion doivent être stockées dans des fichiers distincts et doivent être organisées et séparées dans les fichiers IGES.
La conversion des données est effectuée par le système de traitement des données de mesure des coordonnées.
Pour la méthode d'utilisation, se référer au manuel d'utilisation du logiciel.
2. Relocalisation et intégration
Historique de l'application
Au cours du processus d'arpentage et de cartographie d'un produit, il n'est souvent pas possible de mesurer les données géométriques du produit dans le même système de coordonnées pour diverses raisons.
La première raison est que la taille du produit dépasse la course de la machine de mesure.
La deuxième raison est que la sonde de mesure ne peut pas atteindre le côté opposé du produit.
La troisième raison est qu'il manque des données après le retrait de la pièce et qu'il faut les mesurer à nouveau.
Dans ce cas, il est nécessaire de mesurer chaque partie du produit dans différents états de positionnement (c'est-à-dire dans différents systèmes de coordonnées), ce que l'on appelle la mesure de la relocalisation du produit.
Dans la modélisation, les données provenant de différents systèmes de coordonnées dans différents états de positionnement doivent être transformées dans le même système de coordonnées, ce qui s'appelle l'intégration des données de relocalisation.
Pour les modèles complexes ou de grande taille, plusieurs mesures de positionnement sont souvent nécessaires au cours du processus de mesure.
Les données de mesure finales doivent être déplacées et intégrées plusieurs fois selon un chemin de conversion spécifique, afin de convertir les données mesurées dans chaque positionnement en données de mesure dans le cadre d'un repère de positionnement commun.
Principe d'intégration de la délocalisation
Il y a une divergence entre les données de mesure après le déplacement (relocalisation) de la pièce et les données de mesure avant le déplacement.
Pour intégrer les données de mesure relocalisées dans les données avant le mouvement, il faut établir une forme qui peut être mesurée à la fois avant et après la relocalisation sur la pièce (appelée repère de relocalisation). Tant que les résultats de mesure de la forme après relocalisation correspondent aux résultats de mesure avant relocalisation par une série de transformations, les données de mesure relocalisées peuvent être intégrées dans les données avant le mouvement.
Le repère de relocalisation sert de lien dans l'intégration des données de relocalisation.
Le contrôle PID signifie contrôle proportionnel, intégral et différentiel.
Paramètre P :
Le processus de réponse du système à l'erreur de position peut être déterminé en analysant la relation entre la stabilité, la rigidité et l'erreur de positionnement du système.
Une valeur plus faible indique un système plus stable avec une oscillation réduite, mais avec une rigidité plus faible et une erreur de positionnement plus importante.
En revanche, une valeur plus élevée se traduit par une meilleure rigidité et une erreur de positionnement plus faible, mais le système peut subir des oscillations.
Je paramètre :
Le contrôle de l'erreur de positionnement statique causée par le frottement et la charge est déterminé par la relation entre la valeur de contrôle et le temps d'arrivée à la position théorique.
Une valeur plus faible se traduit par un temps d'arrivée plus long.
Une valeur plus élevée augmente la probabilité d'oscillation à la position théorique.
Paramètre D :
Ce paramètre assure la stabilité et l'amortissement du système en évitant une variation excessive de l'erreur.
Une valeur plus faible entraîne une réponse plus rapide du système à l'erreur de position.
Une valeur plus élevée se traduit par une réponse plus lente du système.
9. Entretien quotidien
Pour éviter le "syndrome des vacances", il est nécessaire de changer le mode de gestion du CMM.
Le CMM est composé d'éléments complexes, notamment des pièces mécaniques, des pièces de commande électriques et des systèmes informatiques.
Il est important d'entretenir correctement la MMT lorsqu'elle est utilisée pour mesurer des pièces, afin de prolonger sa durée de vie.
Les paragraphes suivants expliquent la maintenance de base de la MMC sous trois angles.
Pièces mécaniques
Une machine à mesurer tridimensionnelle (MMT) comporte différents types de composants mécaniques. Pour assurer un bon fonctionnement, il est important d'effectuer un entretien quotidien des composants du système de transmission et du système de circuit d'air.
La fréquence de l'entretien doit être déterminée en fonction de l'environnement d'utilisation de la MMT. Dans les salles de mesure fine où les conditions sont optimales, il est recommandé de procéder à un entretien régulier tous les trois mois. En revanche, dans les environnements très poussiéreux ou lorsque la température et l'humidité ne répondent pas aux exigences de bon fonctionnement, la maintenance doit être effectuée tous les mois.
Pour assurer l'entretien régulier des machines à mesurer, il convient de comprendre les facteurs qui affectent les machines à mesurer :
Influence de l'air comprimé sur la machine à mesurer
Pour choisir un compresseur d'air approprié, il est conseillé d'incorporer un réservoir d'air supplémentaire. Cela augmentera la longévité et la stabilité de la pression du compresseur d'air.
Il est important que la pression initiale du compresseur d'air soit supérieure à la pression de fonctionnement requise.
Lors de la mise en marche de l'équipement, il est recommandé d'activer d'abord le compresseur d'air, puis de mettre l'appareil sous tension.
Influence de l'huile et de l'eau sur les machines de mesure
L'air comprimé est indispensable au bon fonctionnement d'une machine à mesurer, il est donc essentiel d'entretenir correctement le circuit d'air.
Les tâches suivantes doivent être effectuées régulièrement :
- Avant d'utiliser la machine à mesurer chaque jour, inspectez les tuyaux et les filtres et vidangez l'eau et l'huile du filtre et du compresseur d'air/réservoir d'air.
- Nettoyez les éléments filtrants du filtre et du préfiltre joints au moins tous les trois mois.
- Réduire l'intervalle si la qualité de l'air est mauvaise. Avec le temps, la pollution par l'huile peut obstruer les éléments filtrants, ce qui réduit la pression d'air de fonctionnement réelle de la machine à mesurer et compromet son fonctionnement normal.
- Un nettoyage régulier des éléments filtrants est nécessaire.
- Un nettoyage quotidien du rail de guidage pour éliminer les taches d'huile et la poussière permet de maintenir le rail de guidage flottant en bon état de fonctionnement.
Pour protéger le rail de guidage de la machine à mesurer, il convient d'adopter de bonnes habitudes de travail.
Pour assurer la sécurité du rail de guidage, placez un tissu ou un rembourrage en caoutchouc en dessous.
Après le travail ou l'achèvement des pièces, veillez à nettoyer le rail de guidage.
Pendant l'utilisation de la machine à mesurer, il faut s'efforcer de maintenir une température ambiante constante dans la salle de mesure, comme pendant l'étalonnage.
N'oubliez pas que les équipements électriques, les ordinateurs et le personnel génèrent de la chaleur. Lors de l'installation, placez les équipements électriques, les ordinateurs, etc. à une distance suffisante de la machine à mesurer.
Gérer strictement la salle de mesure et minimiser la présence de personnel supplémentaire.
La gestion de l'environnement opérationnel des machines à mesurer de haute précision doit être particulièrement rigoureuse.
Influence de la direction du vent de la climatisation sur la température de la machine de mesure
Pour la climatisation de la salle de mesure, il est préférable de choisir un climatiseur à fréquence variable.
La climatisation à fréquence variable présente d'excellentes capacités d'économie d'énergie et, surtout, de régulation de la température. À capacité normale, il peut réguler la température à ±1 ℃ près.
Notez que l'air provenant du climatiseur peut ne pas être à 20 ℃ et ne doit pas être dirigé directement vers l'appareil de mesure. Pour éviter cela, la direction du vent peut être redirigée vers un mur ou un côté, ce qui entraîne une grande différence de température dans la pièce.
Le climatiseur doit être installé de manière planifiée, en soufflant l'air dans la zone principale de la pièce. La direction du vent doit être ascendante pour créer un grand cycle (pas vers la machine à mesurer) et équilibrer la température intérieure autant que possible.
Si possible, un conduit d'air peut être installé pour acheminer l'air vers le haut de la pièce à travers des plaques d'orifice à double couche, la sortie de l'air de retour se trouvant dans la partie inférieure de la pièce. Cela créera un flux d'air irrégulier et rendra le contrôle de la température dans la salle de mesure plus efficace.
Influence du temps de commutation du climatiseur sur la température de la salle des machines
Vous êtes tenu d'activer le système de climatisation sur votre lieu de travail tous les matins et de l'éteindre à la fin de la journée.
Une fois que la température de la salle d'attente s'est stabilisée pendant environ quatre heures, la précision de la machine de mesure se stabilise également.
Toutefois, ce mode opératoire nuit considérablement à l'efficacité de la machine de mesure, ce qui rend difficile la garantie de la précision en hiver comme en été.
Cela aura également un effet substantiel sur la stabilité normale de la machine de mesure.
Influence de la structure de la salle des machines sur la température de la salle des machines
Pour maintenir une température constante dans la salle des machines de mesure, des mesures d'isolation thermique doivent être mises en œuvre.
S'il y a des fenêtres, il convient d'installer des fenêtres à double vitrage et d'éviter la lumière directe du soleil.
L'utilisation d'une pièce de transition permet de réduire les pertes de température.
Le système de climatisation de la salle des machines doit être d'une capacité comparable à celle de la salle environnante.
Si la salle des machines est trop grande ou trop petite, elle posera des problèmes de régulation de la température.
Dans les régions à forte humidité du Sud ou pendant l'été ou la saison des pluies du Nord, l'arrêt soudain du climatiseur peut provoquer une condensation rapide de la vapeur d'eau contenue dans l'air sur les pièces à basse température et les rails de guidage de la machine à mesurer, entraînant une grave corrosion des flotteurs d'air et de certaines pièces de la machine, ce qui affecte sa durée de vie.
L'humidité excessive peut également provoquer de la corrosion ou des courts-circuits dans les circuits imprimés des ordinateurs et des systèmes de contrôle.
Une faible humidité peut avoir un impact important sur l'absorption d'eau du granit et provoquer des déformations.
La poussière et l'électricité statique peuvent endommager le système de contrôle.
Par conséquent, l'humidité dans la salle des machines doit être contrôlée à 60% ± 5%.
Une mauvaise étanchéité et une humidité de l'air élevée dans la salle des machines de mesure sont les principales causes d'une humidité élevée.
Dans les régions où l'humidité est élevée, la salle des machines doit être mieux étanchéifiée et des déshumidificateurs doivent être ajoutés si nécessaire.
Pour y remédier, le mode de gestion doit passer de "nettoyage avant les vacances" à "nettoyage pendant le travail", et le climatiseur et le déshumidificateur doivent être mis en marche pour éliminer l'humidité.
Un nettoyage régulier de la poussière dans l'ordinateur et le système de contrôle réduira ou préviendra les problèmes potentiels.
L'utilisation de pièces standard pour l'inspection des machines est efficace mais relativement lourde et ne peut être effectuée que périodiquement.
Une méthode plus pratique consiste à utiliser une pièce représentative, à compiler un programme de mesure automatique et à effectuer plusieurs mesures après avoir vérifié la précision de la machine.
Les résultats peuvent être calculés selon des lois statistiques, et une valeur raisonnable ainsi qu'une plage de tolérance peuvent être enregistrées.
L'opérateur peut vérifier fréquemment cette partie pour déterminer la précision de la machine.
Réglage de l'équilibre de l'axe Z
La balance de l'axe Z de la machine à mesurer est composée d'un poids et d'une balance pneumatique, ce qui permet d'équilibrer le poids de l'axe Z et d'assurer son fonctionnement stable.
Si le commutateur d'équilibrage de la pression d'air est déclenché accidentellement, l'axe Z sera déséquilibré.
Pour résoudre ce problème, suivez les étapes suivantes :
- Tournez la base de mesure à 90 degrés pour éviter que la tête de mesure n'entre en contact pendant le fonctionnement.
- Activer l'interrupteur d'arrêt d'urgence.
- Une personne doit tenir physiquement l'axe Z et le déplacer de haut en bas pour évaluer son équilibre.
- Une autre personne doit régler la pression de l'air valve d'équilibrageIl s'agit de procéder à de petits ajustements au fur et à mesure.
Deux personnes peuvent travailler ensemble pour ajuster l'équilibre de l'axe Z jusqu'à ce qu'il soit équilibré lorsqu'il se déplace vers le haut et vers le bas.
L'interrupteur de fin de course sert à protéger la machine et à établir sa position initiale.
Généralement, l'interrupteur de fin de course est un interrupteur à contact ou un interrupteur photoélectrique.
Le contacteur a tendance à changer de position lorsqu'on pousse manuellement l'arbre, ce qui entraîne un mauvais contact.
Pour assurer un bon contact, la position de l'interrupteur peut être réglée correctement.
Lors de l'utilisation d'un interrupteur photoélectrique, il est important de vérifier que la position de l'insert est normale et de le dépoussiérer régulièrement afin de maintenir son bon fonctionnement.
10. Utilisation et précautions de sécurité de la MMT
Seules les personnes ayant reçu une formation et obtenu une certification opérationnelle sont autorisées à utiliser le MMC.
Avant de démarrer la machine chaque jour, l'armoire de commande ne peut être ouverte que lorsque la pression d'alimentation en air répond aux exigences : la pression d'alimentation en air doit être ≥ 0,65 MPa, et la pression d'air de la machine doit être ≥ 0,4 MPa.
Si la hauteur du mélange huile-eau dans le réservoir d'eau triplet dépasse 5 mm, l'eau doit être vidangée manuellement.
Si la pression d'alimentation en air de la machine est normale, mais que la pression au niveau du triplet ne peut être réglée à la valeur normale, l'élément filtrant doit être remplacé.
L'environnement de travail de la MMT doit avoir une température de 20 ± 2°C et une humidité relative de 40-75%.
L'alimentation régulée doit avoir une tension de sortie de 220 ± 10V.
Aucun objet ne doit être placé sur le rail de guidage de la machine.
Ne pas toucher la surface de travail du rail de guidage avec les mains.
Avant de démarrer la machine chaque jour, nettoyez la surface du rail de guidage à trois axes à l'aide d'un chiffon en pur coton tissé trempé dans de l'alcool anhydre, et la machine ne peut être utilisée que lorsque la surface du rail de guidage est sèche.
L'alcool ne doit pas être utilisé pour nettoyer la surface peinte ou la règle de la grille.
La séquence de démarrage est la suivante :
- Mettre le boîtier électrique sous tension
- Allumer la source d'air total
- Mettre en marche le séchoir à froid
- Ouvrir la vanne d'air
- Mettre sous tension l'alimentation de l'armoire de commande
- Mettre en marche le contrôleur de piédestal
- Mettre le moteur en marche lorsque le voyant du boîtier de commande est allumé (la touche d'arrêt d'urgence doit être relâchée).
- Une fois l'auto-inspection du système terminée, démarrez le logiciel de mesure, mettez les trois axes à zéro (rentrez chez vous) et entrez dans l'état de fonctionnement normal après l'achèvement automatique.
La machine doit être ramenée au point zéro après chaque démarrage.
Avant de revenir au point zéro, placez la sonde dans une position sûre afin de vous assurer qu'il n'y a pas d'obstacles lors de la remise à zéro de la sonde et de son déplacement vers le haut dans l'axe Z.
Lors du remplacement de la sonde, utilisez les outils spéciaux fournis avec la machine et étalonnez la nouvelle sonde :
- Démarrer le logiciel avant d'ouvrir le logiciel de mesure (méthode recommandée)
- Si le logiciel de mesure est activé, appuyez sur l'interrupteur à clé d'arrêt d'urgence du boîtier de commande et mettez-le en marche après le remplacement.
Si une boîte de dialogue de message d'erreur de sonde apparaît, fermez-la (ou entrez 100.0.0.1 dans la colonne de saisie de l'adresse web pour afficher l'historique et le message d'erreur). Ce message sera automatiquement effacé lors du prochain démarrage.
En mode manuel, appuyer sur la touche lente à l'approche du point d'échantillonnage.
Lors de la rotation de la sonde, de l'étalonnage de la sonde, du changement automatique de la sonde ou de toute autre opération, veillez à ce qu'aucun obstacle ne se trouve sur la trajectoire de la sonde.
Lorsque le programme n'est pas utilisé ou n'est pas programmé, réglez la vitesse du boîtier de commande sur 0.
Lors de la première opération du programme, réduire la vitesse à 10-30% et vérifier si la piste d'opération répond aux exigences.
Lors de la manipulation et de la mise en place des pièces, placez d'abord le palpeur dans une position sûre et veillez à ce que les pièces n'entrent pas en collision avec la table de travail, en particulier avec la surface du rail de guidage de la machine.
La séquence d'arrêt est la suivante :
- Déplacez l'axe Z vers la gauche, l'avant et le haut de la machine et tournez l'angle du palpeur sur A0B0.
- Nettoyer le plan de travail.
- Mettez hors tension le contrôleur de piédestal, l'alimentation électrique de l'armoire de commande, la vanne d'air, le sécheur, la source d'air principale et le boîtier électrique dans cet ordre.
Les billes standard en acier qui ne sont pas utilisées pendant une période prolongée doivent être scellées avec de l'huile pour éviter la rouille.
Lors de la fixation d'une pièce avec incrustation sur la surface de travail en granit, le couple de serrage ne doit pas dépasser 20 Nm.
Si des conditions anormales sont détectées (à l'exception des messages d'erreur liés au remplacement de la sonde), enregistrez les informations d'erreur affichées par le logiciel, contactez le service technique de Hexcon par fax ou par téléphone, et n'effectuez pas d'inspection ou d'entretien sans conseils et autorisation.
N'installez sur l'ordinateur aucun logiciel qui ne soit pas lié aux trois coordonnées afin de garantir un fonctionnement fiable du système.
Le climatiseur doit fonctionner 24 heures sur 24 et son entretien doit être effectué en automne pour assurer le fonctionnement normal des trois coordonnées.
FAQ sur la machine CMM
Qu'est-ce que la MMC ?
La machine à mesurer tridimensionnelle est communément appelée système de mesure qui détermine les coordonnées tridimensionnelles des points de la surface d'une pièce à travers le mouvement relatif du système de palpage et de la pièce.
Il est également connu sous le nom de machine à mesurer tridimensionnelle (MMT) ou d'instrument de mesure à trois coordonnées.
La température a-t-elle une grande influence sur les résultats de mesure de la MMT ?
La MMT est un système de mesure complexe qui combine la lumière, les machines, l'électricité, l'ordinateur et la technologie de contrôle, ce qui signifie que de nombreux facteurs peuvent affecter l'incertitude des résultats de la mesure.
Cependant, pour les systèmes de coordonnées de petite et moyenne taille, le principal facteur affectant l'incertitude des résultats de mesure est l'écart de la température ambiante par rapport à la température de mesure standard (20°C). Pour obtenir des résultats de mesure de coordonnées précis, la température ambiante doit être strictement contrôlée dans la plage spécifiée par les instructions de la machine à coordonnées.
Quels sont les éléments de la MMT qui doivent être étalonnés et quelle est la durée de l'intervalle de réétalonnage ?
La norme d'étalonnage actuelle pour les trois coordonnées est JJF1064-2000 calibration specification for coordinate measuring machines, qui spécifie que les éléments d'étalonnage sont l'erreur d'indication de la mesure de la longueur et l'erreur de détection.
Il est recommandé de procéder à un étalonnage une fois par an.
Quand la MMT doit-elle calibrer 21 erreurs ?
L'erreur de 21 points est le fondement de la précision de la MMT, et son étalonnage est complexe.
Même si cela n'est pas spécifié dans la norme, l'étalonnage de l'erreur à 21 points est nécessaire dans les circonstances suivantes : lors de l'acceptation d'une nouvelle machine, lorsque le résultat de l'étalonnage de l'erreur de mesure de longueur sort de la plage de tolérance, après le déplacement de la machine à coordonnées et après la réparation de la machine à coordonnées.