Vous êtes-vous déjà demandé comment les machines réalisent des mouvements précis ? Ce blog plonge dans le monde fascinant des modes de contrôle des servomoteurs. De la commande par impulsion à la commande analogique, nous explorerons le fonctionnement de chaque méthode et son application optimale. Préparez-vous à découvrir les secrets de la précision et de l'efficacité des machines modernes !
Les servomoteurs sont largement utilisés dans diverses applications en raison de leur précision et de leur fiabilité. L'une des méthodes les plus courantes pour contrôler les servomoteurs, en particulier dans les petits équipements autonomes, est la commande par impulsions. Cette méthode est simple et facile à comprendre, ce qui en fait un choix populaire pour le positionnement des moteurs.
Concept de base du contrôle
Le mode de contrôle par impulsion fonctionne selon deux principes fondamentaux :
Nombre total d'impulsions: Elle détermine le déplacement du moteur. Le nombre d'impulsions envoyées au servomoteur correspond directement à la distance que le moteur va parcourir. Par exemple, si un servomoteur a besoin de 2000 impulsions pour effectuer un tour complet, l'envoi de 1000 impulsions permet d'effectuer un demi-tour.
Fréquence d'impulsion: Cette fonction détermine la vitesse du moteur. La fréquence à laquelle les impulsions sont envoyées au moteur détermine la vitesse de déplacement du moteur. Une fréquence d'impulsions plus élevée entraîne une vitesse plus élevée du moteur, tandis qu'une fréquence plus basse entraîne un mouvement plus lent.
Mise en œuvre du contrôle des impulsions
Pour mettre en œuvre la commande par impulsions d'un servomoteur, procédez comme suit :
Sélection du mode de contrôle des impulsions: Assurez-vous que le servomoteur et son contrôleur sont réglés pour fonctionner en mode de contrôle d'impulsion. Cela peut généralement se faire par le biais des paramètres de configuration du moteur ou en sélectionnant le mode approprié dans le logiciel du contrôleur.
Déterminer les exigences en matière d'impulsions: Consultez le manuel du servomoteur pour comprendre la relation entre les impulsions et le mouvement du moteur. Le manuel fournit un tableau ou une formule indiquant le nombre d'impulsions nécessaires pour des mouvements spécifiques.
Générer des impulsions: Utilisez un générateur d'impulsions ou un microcontrôleur pour générer les impulsions nécessaires. Le générateur d'impulsions doit être capable de produire des impulsions à la fréquence et au nombre souhaités.
Envoi d'impulsions au moteur: Connectez le générateur d'impulsions à l'entrée du servomoteur. Le moteur recevra les impulsions et se déplacera en conséquence. Assurez-vous que les connexions sont sûres et que le générateur d'impulsions est configuré correctement.
Exemple de tableau tiré du manuel du servomoteur
Voici un exemple de tableau typique tiré d'un manuel de servomoteur :
Simplicité: La commande par impulsions est facile à mettre en œuvre et à comprendre, ce qui la rend adaptée à diverses applications.
Précision: En contrôlant le nombre et la fréquence des impulsions, il est possible d'obtenir un positionnement précis et un contrôle de la vitesse.
Flexibilité: La commande par impulsions peut être utilisée avec différents types de servomoteurs et de contrôleurs, ce qui offre une grande souplesse dans la conception des systèmes.
Méthodes de mise en œuvre du pilote de moteur à commande par impulsions
Dans le domaine de la commande de moteur, en particulier pour les applications à grande vitesse, les méthodes de commande par impulsions sont cruciales pour déterminer le sens de rotation et la vitesse du moteur. Nous examinons ci-dessous trois méthodes distinctes de contrôle des impulsions, chacune présentant des caractéristiques, des avantages et des limites qui lui sont propres.
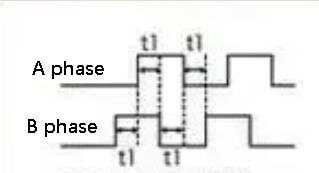
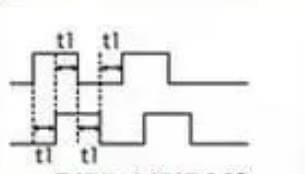
Méthode 1 : Contrôle différentiel
Mise en œuvre :
Le pilote reçoit deux impulsions à grande vitesse, appelées 𝑎a et 𝑏b.
Le sens de rotation du moteur est déterminé par la différence de phase entre ces deux impulsions.
Si l'impulsion 𝑏b conduit l'impulsion 𝑎a de 90 degrés, le moteur tourne dans le sens positif.
Si l'impulsion 𝑏b est en décalage par rapport à l'impulsion 𝑎a de 90 degrés, le moteur tourne en sens inverse.
Caractéristiques :
Impulsions alternées : Les impulsions biphasées alternent, d'où le terme de "contrôle différentiel".
Anti-interférence : Cette méthode présente des capacités anti-interférences plus élevées, ce qui la rend adaptée aux environnements présentant de fortes interférences électromagnétiques.
Limites :
Intensif en ressources : Nécessite deux ports d'impulsion à grande vitesse pour un seul arbre de moteur, ce qui peut constituer une limitation dans les systèmes où la disponibilité des ports d'impulsion à grande vitesse est limitée.
Méthode 2 : contrôle séquentiel des impulsions
Mise en œuvre :
Le conducteur reçoit toujours deux impulsions à grande vitesse, mais elles n'existent pas simultanément.
Lorsqu'une impulsion est active, l'autre doit être inactive.
Une impulsion contrôle la direction positive, tandis que l'autre contrôle la direction négative.
Caractéristiques :
Impulsions séquentielles : Garantit qu'une seule impulsion est émise à un moment donné, évitant ainsi les conflits d'impulsions simultanés.
Limites :
Intensif en ressources : Comme la commande différentielle, cette méthode nécessite également deux ports d'impulsion à grande vitesse pour un seul arbre de moteur.
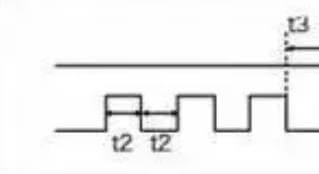
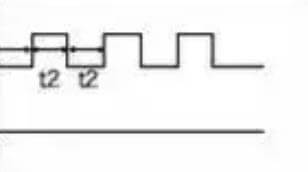
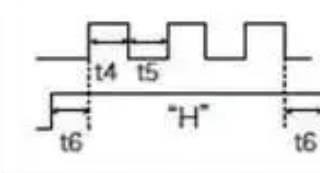
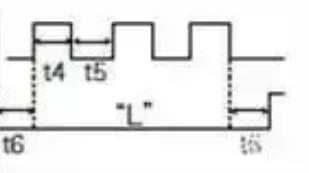
Méthode 3 : Impulsion unique avec signal IO directionnel
Mise en œuvre :
Le pilote reçoit un seul signal d'impulsion à grande vitesse.
Le sens de rotation du moteur est contrôlé par un signal directionnel IO supplémentaire.
Caractéristiques :
Un contrôle plus simple : Cette méthode simplifie la logique de commande en réduisant le nombre de signaux d'impulsion requis.
Efficace en termes de ressources : Occupe moins de ports d'impulsion à grande vitesse, ce qui en fait la solution idéale pour les systèmes de petite taille disposant de ressources limitées.
Limites :
Anti-interférence inférieure : Bien que plus simple, cette méthode peut ne pas offrir le même niveau de capacité anti-interférence que le contrôle différentiel.
Résumé
Chaque méthode de contrôle des impulsions offre des avantages distincts et convient à différents scénarios d'application :
Contrôle différentiel : Meilleur pour les environnements à fortes interférences en raison de ses capacités anti-interférences supérieures, mais nécessite plus de ressources.
Contrôle séquentiel des impulsions : Offre un équilibre entre la complexité du contrôle et l'utilisation des ressources, mais nécessite toujours deux ports d'impulsion à grande vitesse.
Impulsion unique avec signal IO directionnel : Idéale pour les petits systèmes aux ressources limitées, elle offre simplicité et efficacité au prix de capacités anti-interférences potentiellement plus faibles.
Lorsque vous choisissez une méthode de contrôle, tenez compte des exigences spécifiques de votre application, y compris le niveau d'interférence, la disponibilité des ressources et la complexité du contrôle.
2. Mode de commande analogique du servomoteur
Dans les applications où un contrôle précis de la vitesse d'un servomoteur est nécessaire, le contrôle analogique peut être une méthode efficace. Ce mode utilise un signal analogique pour réguler la vitesse du moteur, offrant ainsi une approche simple et flexible.
Sélection de la quantité analogique
Le signal de commande analogique peut être une tension ou un courant. Chaque méthode a ses propres avantages et considérations :
Mode tension
En mode tension, le signal de commande est une tension spécifique appliquée à l'entrée de commande du servomoteur. Cette méthode est relativement simple à mettre en œuvre et peut même être réalisée à l'aide d'un potentiomètre pour les réglages manuels. En voici les points essentiels :
Mise en œuvre: Appliquer une tension spécifique à l'extrémité du signal de commande.
Facilité d'utilisation: Réglage simple, souvent à l'aide d'un potentiomètre.
Adéquation: Idéal pour les applications simples avec un minimum d'interférences environnementales.
Cependant, les signaux de tension sont sensibles au bruit et aux interférences, en particulier dans les environnements complexes. Cela peut entraîner une instabilité de la commande du moteur, ce qui la rend moins fiable dans de tels scénarios.
Mode actuel
Le contrôle en mode courant nécessite un module de sortie de courant correspondant pour générer le signal de contrôle. Malgré l'exigence matérielle supplémentaire, les signaux de courant offrent des avantages significatifs en termes de stabilité et de fiabilité :
Mise en œuvre: Nécessite un module de sortie de courant.
Anti-ingérence: Forte résistance aux bruits et aux interférences de l'environnement.
Adéquation: Optimal pour les environnements complexes où la stabilité du contrôle est essentielle.
La nature robuste des signaux de courant les rend préférables dans les environnements industriels ou d'autres applications où les conditions environnementales peuvent affecter l'intégrité du signal.
3. Mode de contrôle de la communication du servomoteur
Les servomoteurs sont des composants essentiels dans diverses applications industrielles, car ils permettent un contrôle précis des mouvements. Le mode de communication des servomoteurs est essentiel pour obtenir un fonctionnement efficace et précis, en particulier dans les systèmes complexes et à grande échelle. Nous explorons ici les protocoles de communication couramment utilisés pour le contrôle des servomoteurs et leurs avantages.
Protocoles de communication communs
CAN (Controller Area Network)
Vue d'ensemble: CAN est une norme robuste de bus de véhicule conçue pour permettre aux microcontrôleurs et aux dispositifs de communiquer entre eux sans ordinateur hôte.
Avantages: Haute fiabilité, capacités en temps réel et mécanismes de détection des erreurs.
Applications: Largement utilisé dans les systèmes d'automatisation automobile et industrielle.
EtherCAT (Ethernet pour les technologies de contrôle et d'automatisation)
Vue d'ensemble: EtherCAT est un système de bus de terrain basé sur Ethernet conçu pour les applications de contrôle en temps réel.
Avantages: Communication à grande vitesse, faible latence et capacités de synchronisation.
Applications: Idéal pour les applications à haute performance telles que la robotique, les machines à commande numérique et les systèmes de contrôle des mouvements.
MODBUS
Vue d'ensemble: MODBUS est un protocole de communication série publié à l'origine par Modicon pour être utilisé avec ses contrôleurs logiques programmables (PLC).
Avantages: Simplicité, facilité de mise en œuvre et large adoption.
Applications: Couramment utilisé dans les environnements industriels pour connecter des appareils électroniques.
PROFIBUS (Process Field Bus)
Vue d'ensemble: PROFIBUS est une norme de communication par bus de terrain dans le domaine de l'automatisation.
Avantages: Vitesse élevée de transmission des données, fiabilité et capacités de diagnostic étendues.
Applications: Utilisé dans l'automatisation des usines et des processus.
Avantages du contrôle de la communication dans les servomoteurs
L'utilisation de protocoles de communication pour contrôler les servomoteurs offre plusieurs avantages, en particulier dans les applications complexes et à grande échelle :
Évolutivité: La taille du système et le nombre d'arbres moteurs peuvent être facilement ajustés sans modification importante de l'infrastructure.
Complexité de câblage réduite: Le contrôle par communication réduit la nécessité d'un câblage de contrôle important, ce qui simplifie l'installation et la maintenance.
Flexibilité: Le système construit est très flexible, permettant une intégration et une reconfiguration aisées des composants.
Diagnostics améliorés: Les protocoles de communication comprennent souvent des fonctions de diagnostic qui facilitent la surveillance et le dépannage du système.
Contrôle en temps réel: Les protocoles comme EtherCAT offrent des capacités de contrôle en temps réel, essentielles pour les applications nécessitant une synchronisation précise.
4. Extension des modes de contrôle des servomoteurs
1. Contrôle du couple du servomoteur
Le mode de contrôle du couple permet le réglage précis du couple de sortie externe de l'arbre du moteur par l'entrée d'un signal analogique externe ou par l'attribution directe d'une adresse. Ce mode est particulièrement utile dans les applications où le maintien d'une contrainte matérielle constante est crucial.Exemple :
Si une entrée de 10V correspond à un couple de 5 Nm, une entrée de 5V se traduira par un couple de 2,5 Nm.
Lorsque la charge sur l'arbre du moteur est inférieure à 2,5 Nm, le moteur tourne vers l'avant.
Lorsque la charge externe est égale à 2,5 Nm, le moteur reste immobile.
Lorsque la charge dépasse 2,5 Nm, le moteur inverse le sens de rotation (fréquent dans les systèmes chargés par gravité).
Applications :
Dispositifs d'enroulement et de déroulement, tels que ceux utilisés dans la fabrication de textiles ou les équipements de tirage de fibres optiques, où la contrainte du matériau doit rester constante.
Des ajustements en temps réel du réglage du couple peuvent être effectués en modifiant l'entrée analogique ou en changeant la valeur par le biais de protocoles de communication, ce qui garantit une contrainte constante sur le matériau malgré les changements du rayon d'enroulement.
2. Contrôle de la position du servomoteur
En mode de contrôle de position, la vitesse de rotation du moteur est généralement déterminée par la fréquence des impulsions d'entrée externes, tandis que l'angle de rotation est contrôlé par le nombre d'impulsions.Caractéristiques :
Certains systèmes d'asservissement permettent d'assigner directement des valeurs de vitesse et de déplacement par le biais de la communication.
Ce mode offre un contrôle précis de la vitesse et de la position, ce qui le rend idéal pour les applications nécessitant une grande précision.
Applications :
Dispositifs de positionnement
Machines-outils à commande numérique
Machines d'impression
3. Mode vitesse du servomoteur
Le mode vitesse permet de contrôler la vitesse de rotation du moteur via une entrée analogique ou une fréquence d'impulsion.Caractéristiques :
Avec un contrôle PID en boucle externe à partir d'un dispositif de contrôle supérieur, le mode vitesse peut également être utilisé pour le positionnement.
Le signal de position du moteur ou de la charge directe doit être renvoyé à l'ordinateur supérieur pour traitement.
Permet la détection directe de la position de la bague extérieure de la charge, lorsque le codeur de l'arbre du moteur ne mesure que la vitesse et qu'un dispositif séparé à l'extrémité de la charge fournit le signal de position.
Avantages :
Réduit les erreurs lors de la transmission intermédiaire
Améliore la précision globale du positionnement du système
4. Comprendre les trois boucles
Les servosystèmes fonctionnent généralement à l'aide de trois systèmes de régulation PID à rétroaction négative en boucle fermée : la boucle de courant, la boucle de vitesse et la boucle de position.Boucle actuelle :
La boucle la plus interne, entièrement gérée par le pilote du servo.
Détecte et ajuste le courant de sortie de chaque phase du moteur à l'aide d'un dispositif à effet Hall.
Contrôle le couple du moteur avec une charge de calcul minimale et une réponse dynamique rapide.
Boucle de vitesse :
La deuxième boucle, qui utilise le retour d'information du codeur du moteur.
La sortie PID de la boucle de vitesse règle la boucle de courant, ce qui signifie que le contrôle de la vitesse inclut intrinsèquement le contrôle du courant.
Essentiel pour tout mode de contrôle, car la boucle de courant constitue la base du contrôle.
Position Loop :
La boucle la plus extérieure, qui peut être configurée entre le pilote et le codeur du moteur ou entre un contrôleur externe et le codeur du moteur/la charge finale.
La sortie interne de la boucle de contrôle de position règle la boucle de vitesse, ce qui nécessite le fonctionnement des trois boucles en mode de contrôle de position.
Ce mode implique le plus grand effort de calcul et a la réponse dynamique la plus lente.
Conclusion
Il est essentiel de comprendre les différents modes de contrôle et le système à trois boucles des servomoteurs pour optimiser leurs performances dans diverses applications industrielles. Chaque mode offre des avantages uniques et est adapté à des tâches spécifiques, assurant un contrôle précis du couple, de la position et de la vitesse.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Les systèmes asservis font partie intégrante des produits électromécaniques, offrant le plus haut niveau de réponse dynamique et de densité de couple. C'est pourquoi la tendance dans le développement des systèmes d'entraînement est de remplacer les...
Dans le monde en constante évolution de l'automatisation industrielle, les servomoteurs sont les héros méconnus de la précision et de l'efficacité. Mais avec les innombrables fabricants qui se disputent l'attention, comment savoir lesquels...
Vous êtes-vous déjà demandé comment configurer un servo-pilote pour obtenir des performances optimales ? Ce guide couvre tout ce que vous devez savoir sur le réglage des paramètres de gain, du contrôle de la position à la régulation de la vitesse....
Choisir le bon servomoteur pour votre projet peut s'avérer une tâche ardue, tant les options disponibles sont nombreuses. Cet article simplifie le processus en décomposant les éléments clés à prendre en compte : l'application...
Avec l'amélioration du rapport coût-performance des équipements d'imagerie et de la vitesse de traitement de l'information informatique, ainsi que le perfectionnement des théories connexes, la technologie de l'asservissement de la vision a rempli les conditions techniques...
Comment les machines modernes parviennent-elles à un contrôle précis des tâches complexes ? La réponse se trouve dans les servosystèmes. Cet article se penche sur les principes qui sous-tendent les systèmes asservis, en explorant leur fonctionnement et les...
Vous êtes-vous déjà demandé comment les machines sélectionnent le moteur idéal ? Cet article dévoile le processus fascinant qui sous-tend le choix du bon servomoteur pour diverses tâches mécaniques. Plongez dans cet article pour comprendre les calculs...
Qu'est-ce qui distingue les servomoteurs des moteurs pas à pas et les rend pourtant essentiels dans les machines modernes ? Cet article explore leurs différences fondamentales, leurs avantages et leurs applications spécifiques. En lisant cet article, vous comprendrez...
Vous êtes-vous déjà demandé pourquoi votre servomoteur se mettait soudainement à osciller, perturbant ainsi le bon fonctionnement de votre machine ? Cet article présente les causes courantes de l'instabilité des servomoteurs et fournit des solutions pratiques pour...
Faites passer votre entreprise à la vitesse supérieure