Moteurs à courant continu vs. moteurs à courant alternatif : Les différences expliquées
Vous êtes-vous déjà demandé ce qui différencie les moteurs à courant continu des moteurs à courant alternatif ? Dans cet article, nous explorons les différences fondamentales entre ces deux types de moteurs, notamment leurs principes de fonctionnement, leur efficacité et leurs applications. En comprenant ces distinctions clés, vous obtiendrez des informations précieuses sur le moteur le mieux adapté à diverses applications industrielles et grand public. Découvrez comment ces composants essentiels alimentent le monde qui nous entoure !
J'expliquerai le principe de fonctionnement et les différences entre les moteurs à courant continu et à courant alternatif de la manière la plus simple et la plus compréhensible possible.
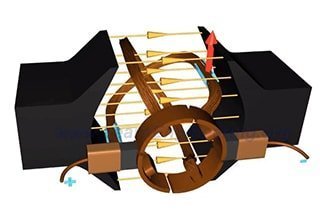
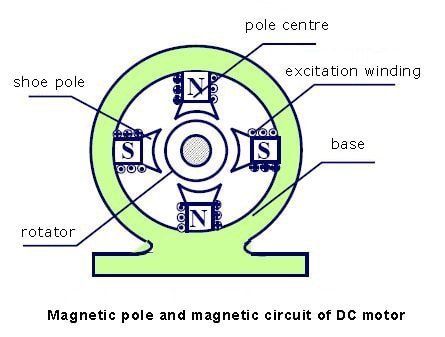
L'image ci-dessus illustre la représentation physique la plus simple d'un moteur à courant continu.
WPrincipe de travail
Moteur à courant continu
Dans un moteur à courant continu, le courant provenant de l'alimentation en courant continu circule du pôle positif vers le côté gauche du balai. Le balai et le collecteur frottent l'un contre l'autre et le courant passe à travers le collecteur gauche, qui a deux segments gauche et droit, dans la bobine et sort par le côté droit de la bobine. Le courant retourne ensuite au pôle négatif de l'alimentation électrique, créant ainsi une boucle fermée.
La bobine se trouve dans le champ magnétique des pôles magnétiques principaux (N et S) et est soumise à une force électromagnétique. Comme les deux côtés de la bobine ont des directions de courant différentes (vers l'intérieur à gauche et vers l'extérieur à droite), ils sont soumis à des forces électromagnétiques de magnitudes opposées. Ces deux forces créent le couple électromagnétique, qui entraîne la rotation de la bobine.
La bobine est insérée dans la fente du rotor, ce qui permet au moteur de commencer à tourner. Les pièces d'inversion tournent avec l'arbre en rotation tandis que le balai reste immobile. Après une rotation, la bobine de droite se déplace vers la gauche et la bobine de gauche se déplace vers la droite. Toutefois, le collecteur garantit que le courant dans la bobine de gauche circule dans le même sens que le courant dans la bobine de droite, ce qui entraîne une direction constante de la force électromagnétique reçue à la même position. Ceci assure la rotation cyclique du moteur.
Cependant, le champ magnétique de la bobine change lorsque la bobine tourne dans différentes positions, ce qui entraîne une modification de la force électromagnétique sur la bobine. Cela rend la rotation de la bobine instable et la ralentit soudainement. Pour garantir une force uniforme et stable, plusieurs bobines peuvent être installées.
Nous obtenons alors ce qui suit :
Même avec un tel modèle de moteur :
En outre, les deux pôles magnétiques extérieurs du moteur sont en fait créés par les bobines d'excitation qui génèrent des électro-aimants. Les petits moteurs utilisent des aimants permanents, tandis que les grands moteurs utilisent des électro-aimants.
Le modèle n'est qu'une représentation, mais le rotor réel du moteur est structuré de cette manière.
Moteur à courant alternatif
Les moteurs à courant alternatif sont classés en deux catégories : les moteurs synchrones et les moteurs asynchrones. Les moteurs synchrones sont principalement utilisés comme générateurs, tandis que les moteurs asynchrones sont principalement utilisés comme moteurs électriques. Cette discussion se concentre sur les moteurs asynchrones.
Les moteurs asynchrones sont appréciés pour leur structure simple, leur faible coût, leur facilité d'entretien et leur fiabilité de fonctionnement, ce qui explique leur large utilisation. Malgré leur structure simple, le principe de fonctionnement des moteurs à courant alternatif est en fait plus complexe que celui des moteurs à courant continu, ce qui complique la compréhension de la technologie.
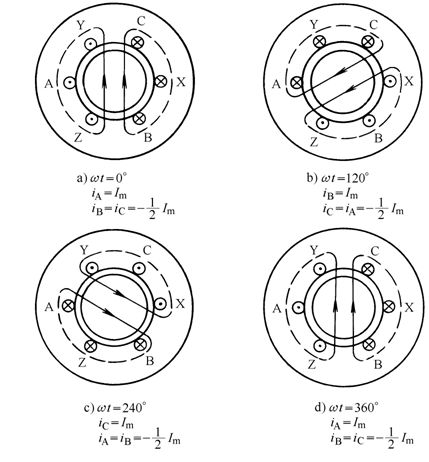
Un courant alternatif symétrique triphasé est appliqué au stator du moteur à courant alternatif, comme le montre la figure ci-dessus. Le stator reste immobile et seule une variation du courant peut générer un champ magnétique rotatif synthétique. Ce champ magnétique agit comme un aimant rotatif autour du stator, ce qui facilite le travail.
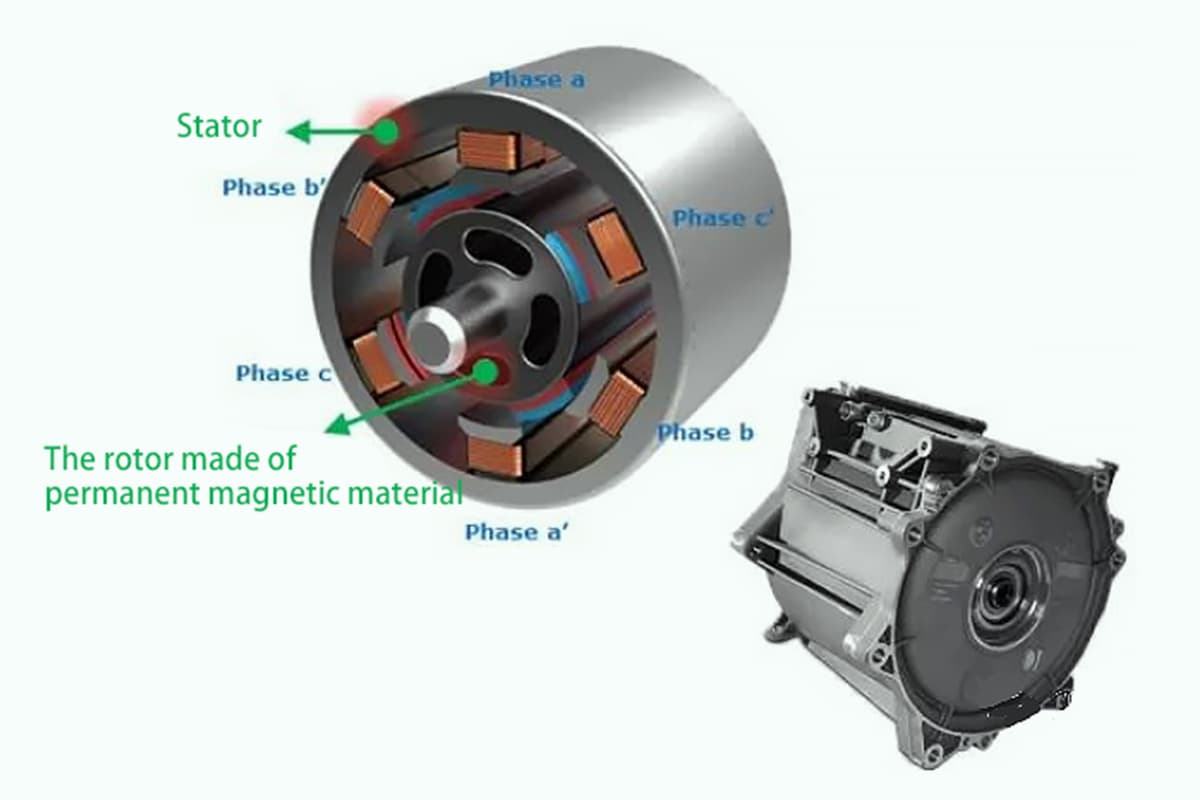
Une bobine fermée est située dans le stator, et une force électromotrice et un courant sont induits dans la bobine fermée, ce qui entraîne la création d'une force électromagnétique. Celle-ci entraîne la rotation de la bobine fermée.
On peut également comprendre qu'il y a un aimant rotatif sur le stator, et que la bobine fermée à l'intérieur du rotor fonctionne comme un électro-aimant grâce à la charge d'induction. Lorsque l'électroaimant extérieur tourne, il entraîne la rotation de l'électroaimant intérieur, ce qui fait tourner le rotor du moteur à courant alternatif.
La vitesse de rotation du champ magnétique du stator est appelée vitesse synchrone. Le rotor, qui est entraîné par le champ magnétique du stator, tourne à une vitesse plus lente, appelée vitesse asynchrone. C'est de là que vient le terme "moteur asynchrone".
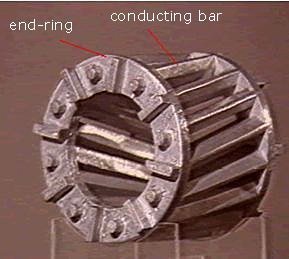
Le rotor d'un moteur à courant alternatif est une simple bobine fermée ou un conducteur, souvent appelé moteur asynchrone "cage à rat" en raison de sa structure en forme de cage. La force électromotrice et le courant à l'intérieur du rotor sont induits par le champ magnétique du stator, ce qui explique pourquoi le moteur asynchrone est également connu sous le nom de moteur à induction.
C'est pourquoi le moteur asynchrone triphasé porte plusieurs noms, notamment moteur à courant alternatif, moteur asynchrone et moteur à induction, chacun se référant à lui d'un point de vue différent. Si vous avez d'autres questions, n'hésitez pas à les poser dans les commentaires et je ferai de mon mieux pour vous fournir des réponses détaillées.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Vous êtes-vous déjà demandé comment les trains pouvaient flotter au-dessus des rails ou comment les robots pouvaient effectuer des mouvements précis ? Cet article dévoile le monde fascinant des moteurs linéaires, en expliquant leurs principes, leurs types et leurs avantages uniques. ....
Vous êtes-vous déjà demandé ce qui différencie les moteurs à courant continu sans balais des moteurs synchrones à aimant permanent ? Cet article plonge dans le monde fascinant de ces deux types de moteurs, en explorant leurs principes,...
Comment les moteurs électriques convertissent-ils l'électricité en mouvement ? Imaginez un monde où près de la moitié de l'énergie que nous consommons est fournie par ces moteurs. Cet article se penche sur la science des moteurs électriques, expliquant...
Les systèmes asservis font partie intégrante des produits électromécaniques, offrant le plus haut niveau de réponse dynamique et de densité de couple. C'est pourquoi la tendance dans le développement des systèmes d'entraînement est de remplacer les...
Dans le monde en constante évolution de l'automatisation industrielle, les servomoteurs sont les héros méconnus de la précision et de l'efficacité. Mais avec les innombrables fabricants qui se disputent l'attention, comment savoir lesquels...
Quel type de questions peut vous aider à réussir un entretien en génie mécanique ? Cet article présente les 20 questions les plus importantes qui mettent à l'épreuve divers aspects de l'ingénierie mécanique, des systèmes de transmission...
Vous êtes-vous déjà demandé ce qui alimente les systèmes d'alimentation en eau de votre maison, de votre ferme ou de votre ville ? Cet article explore les principaux fabricants de pompes pour puits profonds, en mettant en lumière les leaders de l'industrie tels que...
Vous êtes-vous déjà demandé comment choisir le moteur idéal pour votre projet ? La clé réside dans la compréhension des types de moteurs - à courant continu, asynchrones et synchrones - et de leurs avantages uniques. Cet article présente...
Vous êtes-vous déjà demandé ce qui assure la sécurité et la fiabilité des systèmes électriques de votre maison ? Les appareils électriques à basse tension, tels que les disjoncteurs et les contacteurs, jouent un rôle crucial à cet égard. Cet article démystifie les...
Faites passer votre entreprise à la vitesse supérieure