Comment fonctionnent les moteurs électriques ? Un guide complet
Comment les moteurs électriques convertissent-ils l'électricité en mouvement ? Imaginez un monde où près de la moitié de l'énergie que nous consommons est fournie par ces moteurs. Cet article se penche sur la science des moteurs électriques et explique comment ils utilisent les champs magnétiques et le courant pour produire des mouvements rotatifs ou linéaires. En comprenant les différents types de moteurs, tels que les moteurs à courant continu et les moteurs à courant alternatif, ainsi que leurs mécanismes internes, vous comprendrez mieux le rôle crucial qu'ils jouent dans la technologie moderne. Prêt à percer les mystères de ces appareils omniprésents ? Poursuivez votre lecture pour découvrir les principes et les applications des moteurs électriques.
Près de la moitié de la consommation mondiale d'énergie est attribuée aux moteurs électriques. L'amélioration de leur efficacité est donc considérée comme la mesure la plus efficace pour résoudre les problèmes énergétiques mondiaux.
Types de moteurs
En règle générale, les moteurs convertissent la force générée par le flux de courant dans un champ magnétique en mouvement de rotation, mais cela inclut également le mouvement linéaire.
En fonction du type de source d'énergie qui alimente le moteur, on distingue les moteurs à courant continu et les moteurs à courant alternatif.
Par ailleurs, selon le principe de rotation du moteur, on peut schématiquement les classer dans les catégories suivantes, à l'exclusion des moteurs spéciaux.
1. Moteurs à courant continu (CC)
(1) Moteurs à balais
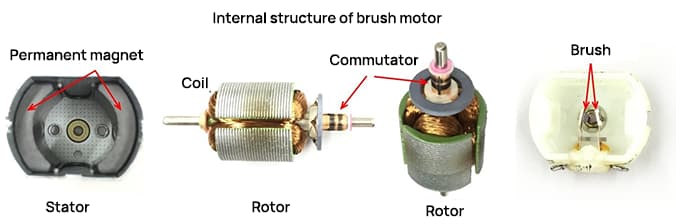
Les moteurs à balais, très répandus, sont généralement appelés moteurs à courant continu. Ils tournent en mettant en contact séquentiellement les électrodes appelées "balais" (du côté du stator) et le "collecteur" (du côté de l'induit) pour commuter le courant.
(2) Moteurs CC sans balais
Les moteurs à courant continu sans balais n'ont pas besoin de balais ni de collecteurs. Ils utilisent des fonctions de commutation telles que des transistors pour commuter le courant et obtenir un mouvement de rotation.
(3) Moteurs pas à pas
Ce moteur fonctionne en synchronisation avec une puissance d'impulsion et est donc également connu sous le nom de moteur à impulsions. Il se caractérise par sa capacité à réaliser facilement des opérations de positionnement précises.
2. Moteurs à courant alternatif (AC)
(1) Moteurs asynchrones
Le courant alternatif génère un champ magnétique rotatif dans le stator, ce qui fait que le rotor induit un courant et tourne sous son interaction.
(2) Moteurs synchrones
Le courant alternatif crée un champ magnétique rotatif et le rotor à pôles magnétiques tourne sous l'effet de l'attraction. La vitesse de rotation est synchronisée avec la fréquence du courant.
Moteur pas à pas
Moteur à courant continu brossé
Moteur à courant continu sans balais
Courant, champs magnétiques et force
Tout d'abord, pour faciliter les explications ultérieures sur les principes du moteur, revenons sur les lois/règles de base concernant le courant, les champs magnétiques et la force.
Bien qu'elles puissent évoquer un sentiment de nostalgie, ces connaissances peuvent être facilement oubliées si les composants magnétiques ne sont pas utilisés régulièrement.
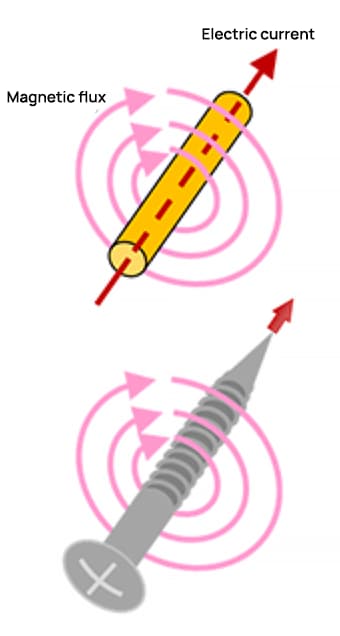
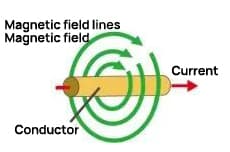
Loi d'Ampère (règle de la vis à droite)
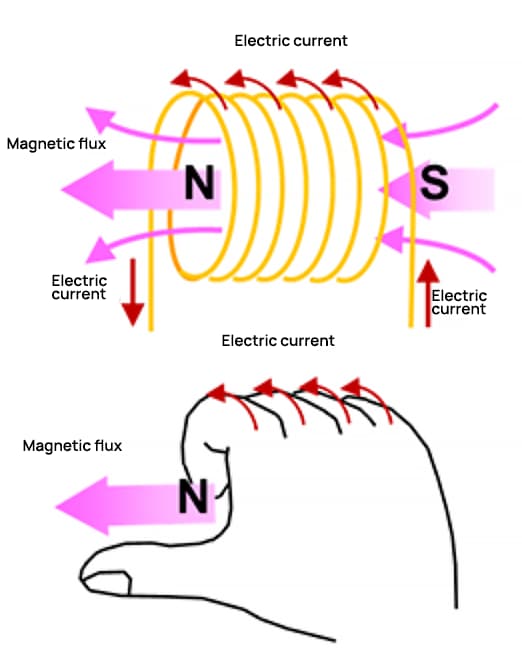
Le flux magnétique généré par un courant dans une bobine
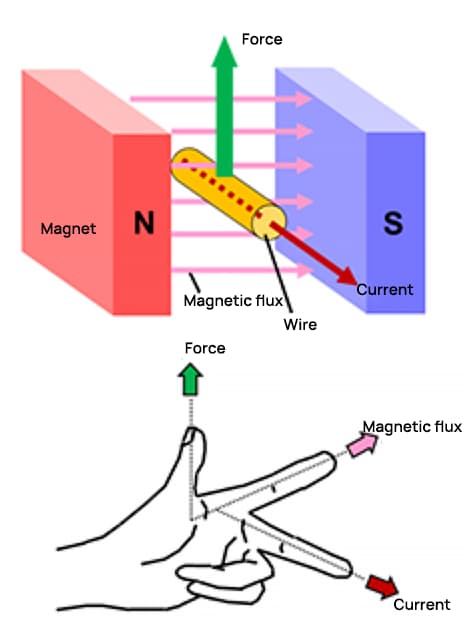
Basé sur la règle de la main gauche de Fleming
Nous illustrerons cela à l'aide d'images et d'équations.
Schéma de la rotation du moteur
Lorsque le cadre est rectangulaire, il faut tenir compte de la force agissant sur le courant. La force F exercée sur les parties a et c du cadre est :
Le couple est généré autour de l'axe central. Par exemple, si l'on considère un état où l'angle de rotation n'est que de θ, la force agissant perpendiculairement à b et d est sinθ. Par conséquent, le couple Ta dans la partie a est représenté par la formule suivante :
En considérant la partie C de la même manière, le couple est doublé, générant un couple calculé par la formule suivante :
Sachant que l'aire d'un rectangle est S = h*l, on obtient le résultat suivant en le substituant à la formule mentionnée précédemment :
Cette formule s'applique non seulement aux rectangles, mais aussi à d'autres formes courantes telles que les cercles. Ce principe est à la base du fonctionnement des moteurs électriques.
Comment tourne un moteur ?
1) Les moteurs tournent en utilisant des aimants et la force magnétique.
Autour d'un aimant permanent avec un arbre rotatif :
① Faire tourner l'aimant (pour générer un champ magnétique tournant).
② Cela découle du principe selon lequel les pôles opposés (N et S) s'attirent, tandis que les pôles semblables se repoussent.
③ L'aimant avec l'arbre tournant tourne alors.
C'est le principe de base de la rotation des moteurs.
Le courant qui traverse le conducteur génère un champ magnétique rotatif autour de celui-ci, ce qui fait tourner l'aimant, qui représente essentiellement le même état de mouvement.
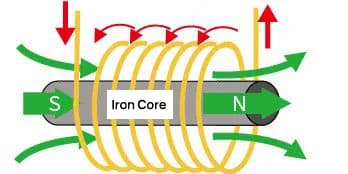
En outre, lorsqu'un conducteur est enroulé en bobine, les forces magnétiques se synthétisent pour former un flux magnétique important, créant ainsi un pôle Nord et un pôle Sud.
En outre, l'insertion d'un noyau ferreux dans le conducteur enroulé permet aux lignes de champ magnétique de passer plus facilement, générant ainsi une force magnétique plus importante.
2) Moteurs rotatifs opérationnels
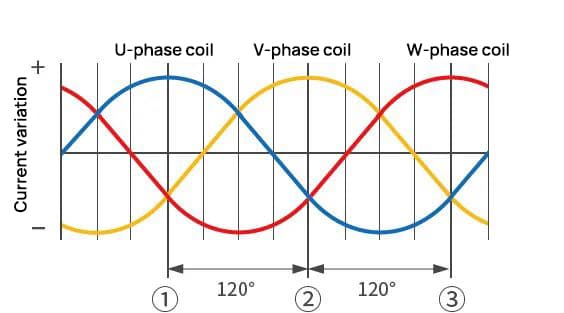
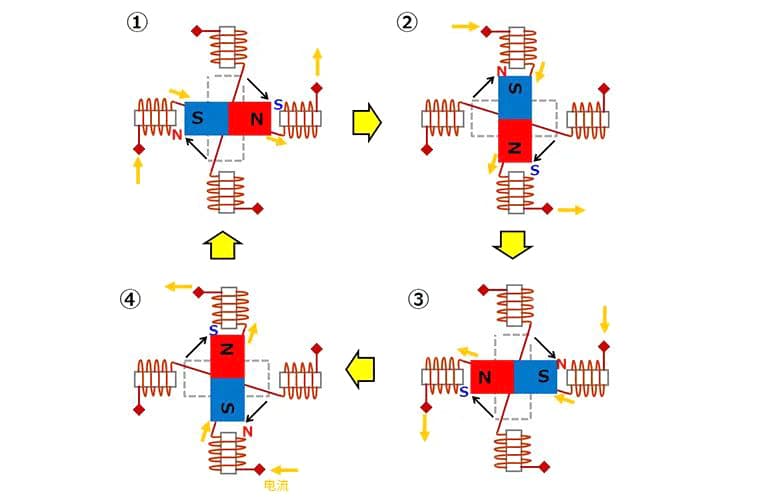
Dans ce contexte, nous présentons une approche pratique pour les moteurs rotatifs, en démontrant l'utilisation du courant alternatif triphasé et des bobines pour générer un champ magnétique rotatif. (Le courant alternatif triphasé se réfère à des signaux alternatifs phasés à des intervalles de 120°).
Le champ magnétique synthétisé dans l'état ① susmentionné correspond à la figure ① ci-dessous.
Le champ magnétique synthétisé dans l'état ② mentionné précédemment s'aligne sur la figure ② présentée ci-dessous.
Le champ magnétique synthétisé associé à l'état ③ susmentionné est représenté dans la figure ③ ci-dessous.
Comme indiqué ci-dessus, la bobine enroulée autour du noyau de fer est divisée en trois phases : Bobine en phase U, bobine en phase V et bobine en phase W, disposées à 120° d'intervalle. La bobine dont la tension est la plus élevée génère un pôle nord, tandis que celle dont la tension est la plus faible génère un pôle sud.
Chaque phase varie en fonction de l'onde sinusoïdale, donc la polarité (pôle nord ou sud) et le champ magnétique (force magnétique) générés par chaque bobine changent.
A ce stade, si l'on considère uniquement la bobine générant le pôle nord, la séquence de changements va de la bobine en phase U à la bobine en phase V, puis à la bobine en phase W, et enfin à la bobine en phase U, produisant ainsi une rotation.
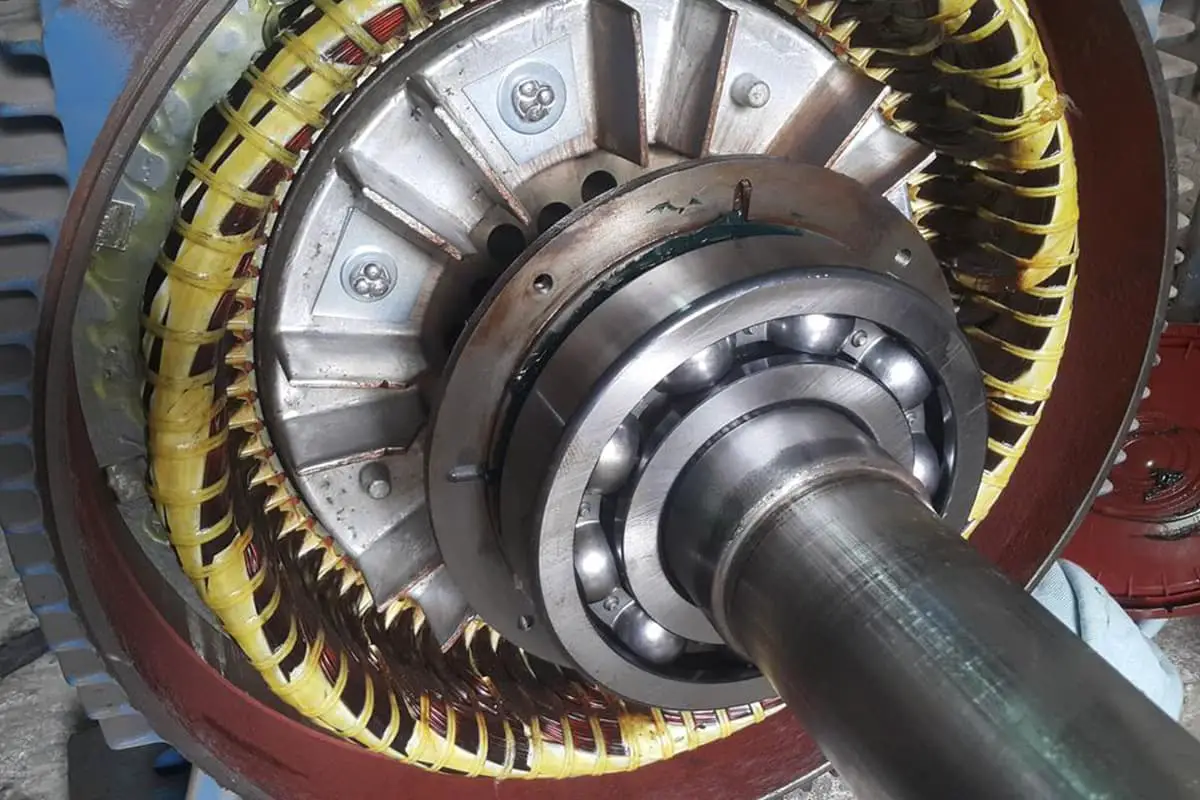
Structure des petits moteurs
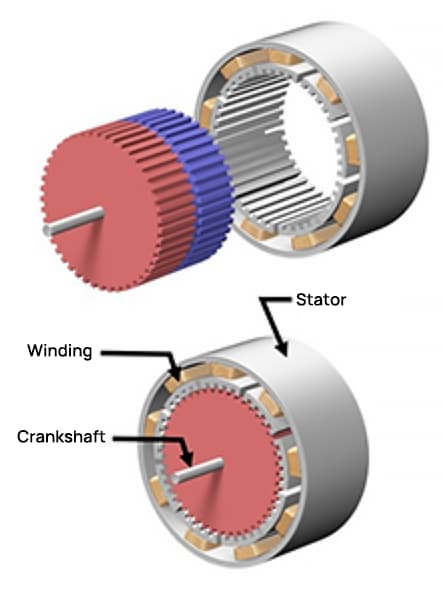
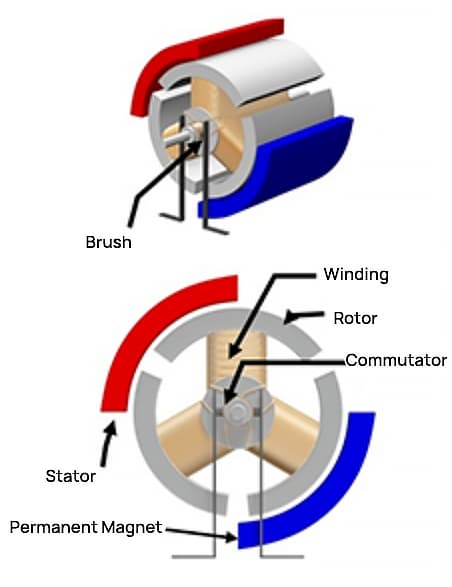
La figure ci-dessous présente une construction générale et une comparaison de trois types de moteurs : les moteurs pas à pas, les moteurs à courant continu à balais et les moteurs à courant continu sans balais.
Les composants de base de ces moteurs comprennent principalement les bobines, les aimants et les rotors. En raison de leur diversité, ils sont classés en deux catégories : les moteurs à bobine et les moteurs à aimant.
Moteur pas à pas
Moteur à courant continu brossé
Moteur à courant continu sans balais
Ce qui suit est une description structurelle liée à l'exemple de diagramme. Il faut comprendre que ce document présente la structure dans un cadre général, car il peut y avoir d'autres structures si elles sont divisées de manière plus détaillée.
Les bobines du moteur pas à pas sont fixées à l'extérieur, les aimants tournant à l'intérieur ; les aimants du moteur à courant continu brossé sont fixés à l'extérieur, les bobines tournant à l'intérieur.
L'alimentation des bobines et le changement de direction du courant sont assurés par des balais et des commutateurs ; dans les moteurs sans balais, les bobines sont fixées à l'extérieur, les aimants tournant à l'intérieur.
En raison des variations dans les types de moteurs, même avec les mêmes composants de base, leurs structures peuvent différer. Des détails spécifiques seront expliqués dans chaque section.
Moteur à balais
Structure du moteur à balais
L'image ci-dessous montre l'extérieur d'un moteur à courant continu brossé couramment utilisé dans les modèles, ainsi qu'une vue éclatée d'un moteur typique à deux pôles (deux aimants) et à trois fentes (trois bobines). Nombreux sont ceux qui ont l'habitude de démonter les moteurs et d'enlever les aimants.
Dans un moteur à courant continu à balais, les aimants permanents sont fixes tandis que les bobines peuvent tourner autour du centre interne. Le côté fixe est appelé "stator" et le côté tournant est appelé "rotor".
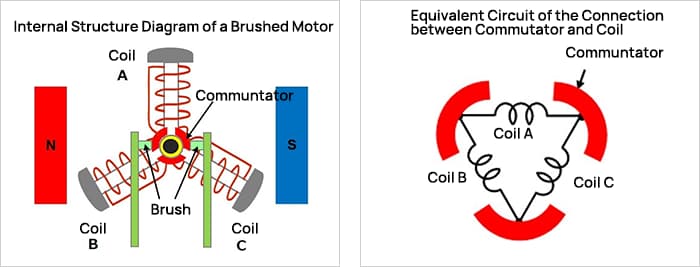
Voici un schéma illustrant les concepts structurels.
L'axe central de rotation est entouré de trois collecteurs - des plaques métalliques incurvées utilisées pour la commutation du courant électrique. Pour éviter tout contact entre eux, les collecteurs sont espacés de 120° (360° ÷ 3 unités). Ces collecteurs tournent avec l'axe.
Chaque collecteur est relié à une extrémité d'une bobine et à une autre, et ensemble, les trois collecteurs et les trois bobines forment un réseau de circuit complet (anneau).
Deux balais sont fixés à 0° et 180° pour entrer en contact avec les collecteurs. Une source de courant continu externe est connectée aux balais, et le courant circule le long du chemin allant du balai au collecteur, du collecteur à la bobine, et de la bobine au balai.
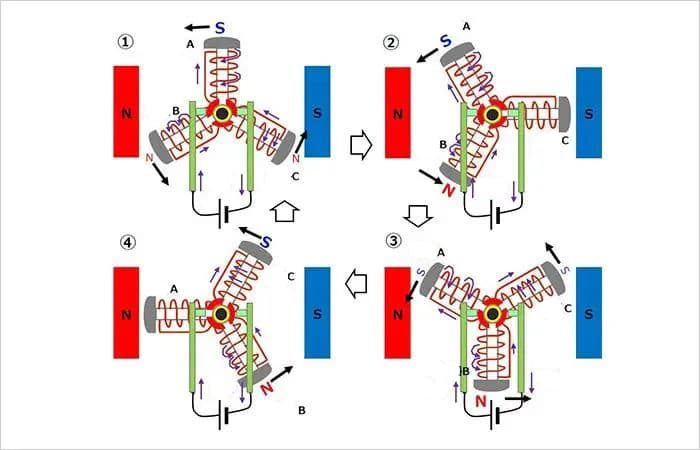
C'est le principe de rotation d'un moteur à balais.
① Rotation dans le sens inverse des aiguilles d'une montre à partir de l'état initial
La bobine A se trouve au sommet, la source d'énergie étant connectée aux balais, le côté gauche étant désigné par (+) et le côté droit par (-). Un courant élevé circule du balai gauche vers la bobine A en passant par le collecteur, ce qui transforme la partie supérieure (extérieure) de la bobine A en un pôle sud (S).
Étant donné que la moitié du courant de la bobine A circule du balai gauche vers les bobines B et C dans la direction opposée à la bobine A, les côtés extérieurs des bobines B et C deviennent des pôles nord faibles (N), indiqués par des lettres plus petites dans le diagramme.
Les champs magnétiques générés dans ces bobines, ainsi que la répulsion et l'attraction des aimants, produisent une force qui fait tourner les bobines dans le sens inverse des aiguilles d'une montre.
② Rotation supplémentaire dans le sens inverse des aiguilles d'une montre
Ensuite, en supposant que la bobine A a tourné de 30° dans le sens inverse des aiguilles d'une montre, le balai droit entre en contact avec les deux collecteurs.
Le courant dans la bobine A continue de passer du balai gauche au balai droit, et le côté extérieur de la bobine reste un pôle sud. Le même courant traverse la bobine B, transformant son côté extérieur en un pôle nord plus fort. La bobine C est court-circuitée par les balais aux deux extrémités, de sorte que le courant ne circule pas et qu'aucun champ magnétique n'est généré.
Même dans cet état, une force de rotation anti-horaire est appliquée. De ③ à ④, la bobine supérieure continue d'être entraînée vers la gauche et la bobine inférieure continue d'être entraînée vers la droite, ce qui entraîne une rotation continue dans le sens inverse des aiguilles d'une montre.
À chaque rotation de 30° de la bobine vers les états ③ et ④, lorsque la bobine est au-dessus de l'axe horizontal central, son côté extérieur devient un pôle sud ; lorsqu'elle est en dessous, elle devient un pôle nord, et ce mouvement se répète.
En d'autres termes, la bobine supérieure subit à plusieurs reprises une force vers la gauche et la bobine inférieure une force vers la droite (toutes deux dans le sens inverse des aiguilles d'une montre). Le rotor continue ainsi à tourner dans le sens inverse des aiguilles d'une montre.
Si la source d'alimentation est connectée aux balais gauche (-) et droit (+) opposés, un champ magnétique inverse est généré dans la bobine, inversant ainsi le sens de la force appliquée à la bobine, ce qui la fait tourner dans le sens des aiguilles d'une montre.
En outre, lorsque la source d'énergie est déconnectée, le rotor du moteur à balais s'arrête de tourner en raison de l'absence du champ magnétique qui entraînait sa rotation.
Moteur sans balai triphasé à onde pleine
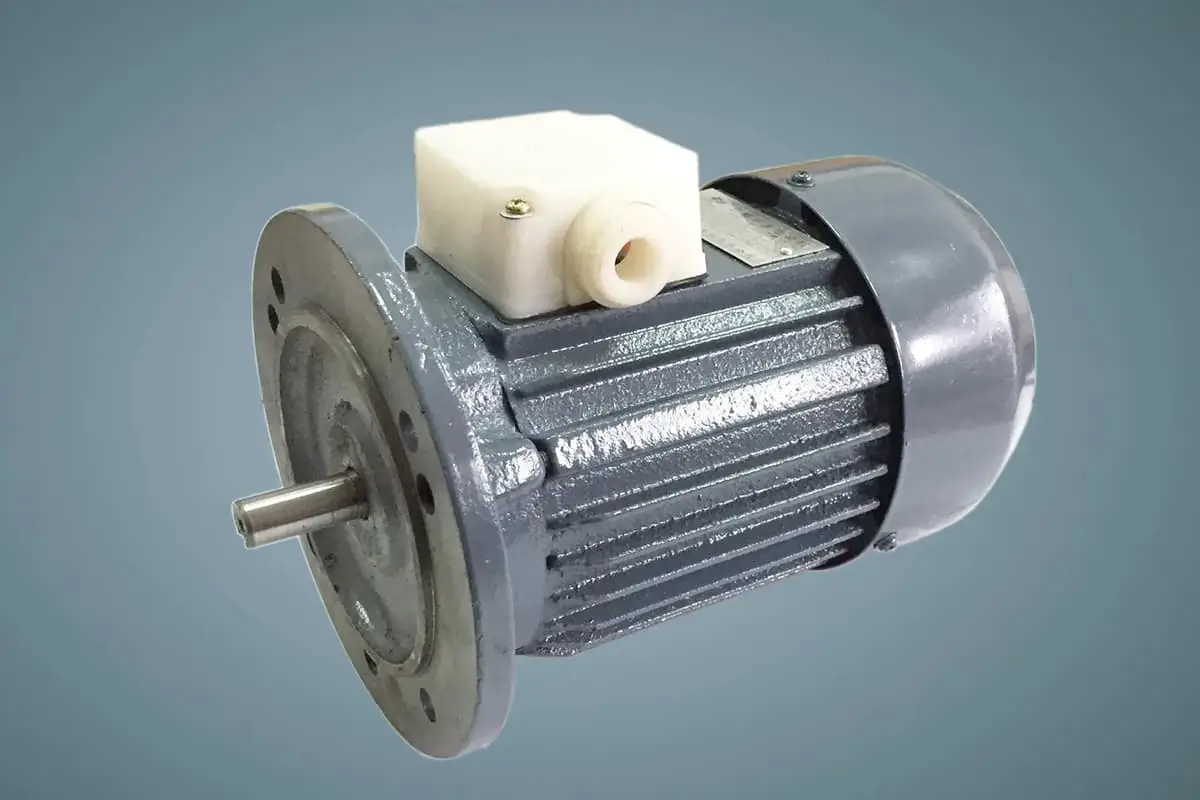
Aspect et structure du moteur sans balai triphasé à ondes pleines
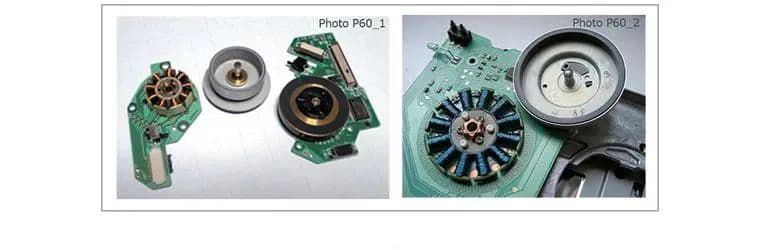
L'image ci-dessous donne un exemple de l'aspect et de la structure du moteur sans balais.
Exemple d'apparence et de structure d'un moteur sans balais
Le côté gauche montre un exemple de moteur à broche principal utilisé pour faire tourner le disque dans l'appareil de lecture du disque, contenant un total de neuf bobines, trois phases multipliées par trois.
À droite, un exemple de moteur de broche principal d'un dispositif FDD, avec douze bobines (trois phases multipliées par quatre). Les bobines sont montées sur un circuit imprimé et enroulées autour d'un noyau de fer.
Sur le côté droit de la bobine, le composant en forme de disque est un rotor à aimant permanent. Le périmètre est un aimant permanent, l'arbre du rotor est inséré au centre de la bobine et recouvre une partie de la bobine, l'aimant permanent entourant la périphérie de la bobine.
Schéma de la structure interne et circuit équivalent d'un moteur sans balais triphasé à onde pleine
Viennent ensuite le schéma simplifié de la structure interne et le schéma du circuit équivalent des connexions de la bobine pour un moteur sans balai triphasé à onde pleine.
Ce schéma représente une structure simple d'un moteur à 2 pôles (2 aimants) et 3 fentes (3 bobines). Il ressemble à la structure d'un moteur à balais avec un nombre égal de pôles et d'encoches, sauf que le côté bobine est fixe et que les aimants sont rotatifs. Naturellement, ce modèle n'intègre pas de balais.
Dans cette configuration, les bobines sont connectées en Y. Les composants semi-conducteurs alimentent les bobines en courant. Des composants semi-conducteurs alimentent les bobines en courant, contrôlant l'entrée et la sortie du courant en fonction de la position des aimants en rotation.
Dans cet exemple, un élément Hall est utilisé pour détecter la position des aimants. L'élément Hall est placé entre les bobines, où il détecte la tension générée par l'intensité du champ magnétique et l'utilise pour obtenir des informations sur la position.
Sur l'image du moteur de broche FDD présentée précédemment, on peut également observer un élément Hall (situé au-dessus des bobines) qui sert à détecter la position entre les bobines.
L'élément Hall est un capteur magnétique bien connu. Il peut convertir l'amplitude d'un champ magnétique en une tension, représentant la direction du champ par des valeurs positives ou négatives. Le schéma ci-dessous illustre l'effet Hall.
L'élément Hall utilise le phénomène suivant : "lorsque le courant IH traverse le semi-conducteur et que le flux magnétique B le traverse à angle droit par rapport au courant, une tension VH est générée dans la direction perpendiculaire au courant et au champ magnétique".
Ce phénomène, connu sous le nom d'"effet Hall", a été découvert par le physicien américain Edwin Herbert Hall. La tension VH générée est représentée par la formule suivante.
VH=(KH/d)・IH・B
Où KH est le coefficient de Hall, et d l'épaisseur de la surface pénétrant le flux.
Comme le suggère la formule, plus le courant est important, plus la tension est élevée. Cette caractéristique est souvent utilisée pour détecter la position du rotor (aimant).
Principe de rotation d'un moteur sans balais triphasé à onde pleine
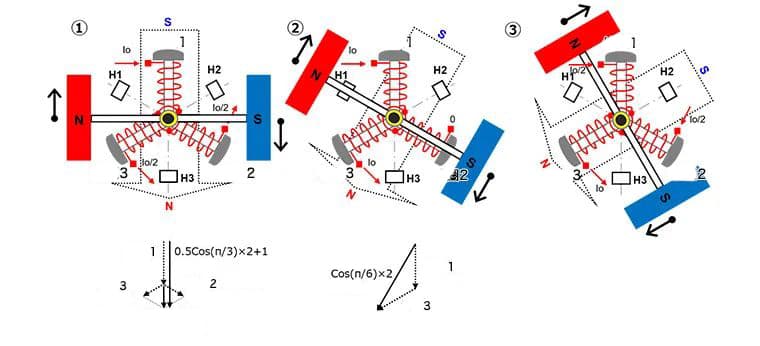
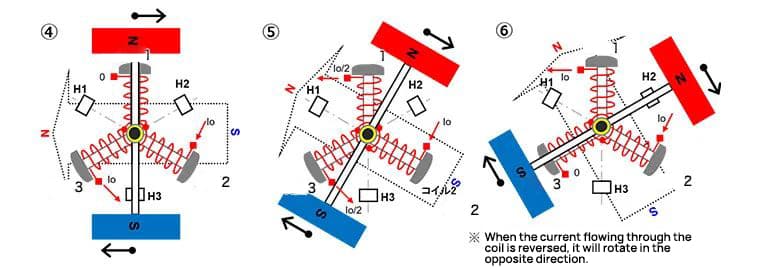
Le principe de rotation du moteur sans balais sera expliqué dans les étapes ① à ⑥. Pour faciliter la compréhension, l'aimant permanent a été simplifié, passant d'un cercle à un rectangle.
1) Dans un système de bobines triphasées, imaginez la bobine 1 fixée à la position 12 heures d'une horloge, la bobine 2 à 4 heures et la bobine 3 à 8 heures. Supposons un aimant permanent bipolaire avec son pôle nord à gauche et son pôle sud à droite, capable de tourner.
Le courant Io est introduit dans la bobine 1, générant un champ magnétique de pôle sud à l'extérieur de la bobine. La moitié de ce courant, Io/2, sort des bobines 2 et 3, créant un champ magnétique de pôle Nord sur leur extérieur.
Lorsque les champs magnétiques des bobines 2 et 3 subissent une synthèse vectorielle, un champ magnétique de pôle Nord descendant est généré. Ce champ est deux fois plus petit que le champ magnétique produit par le passage du courant Io dans une bobine et, ajouté au champ de la bobine 1, il est 1,5 fois plus grand. Cela crée un champ magnétique synthétisé à un angle de 90° par rapport à l'aimant permanent, générant ainsi un couple maximal et incitant à la rotation de l'aimant permanent dans le sens des aiguilles d'une montre.
Comme le courant dans la bobine 2 diminue et que celui dans la bobine 3 augmente en fonction de la position de rotation, le champ magnétique synthétisé tourne également dans le sens des aiguilles d'une montre, poursuivant la rotation de l'aimant permanent.
2) Avec une rotation de 30°, le courant Io entre dans la bobine 1, ramenant le courant dans la bobine 2 à zéro, et faisant sortir le courant Io de la bobine 3.
L'extérieur de la bobine 1 devient le pôle S et l'extérieur de la bobine 3 devient le pôle N. Pendant la combinaison vectorielle, le champ magnétique généré est √3 (environ 1,72) fois supérieur à celui d'une bobine unique parcourue par le courant Io. Il en résulte également un champ magnétique composite formant un angle de 90° avec le champ de l'aimant permanent et tournant dans le sens des aiguilles d'une montre.
Lorsque le courant d'entrée Io dans la bobine 1 est réduit en fonction de la position de rotation, le courant d'entrée dans la bobine 2 commence à augmenter à partir de zéro, et le courant de sortie dans la bobine 3 augmente jusqu'à Io, le champ magnétique composite tourne également dans le sens des aiguilles d'une montre, et l'aimant permanent continue à tourner.
En supposant que tous les courants de phase sont sinusoïdaux, le courant est ici Io×sin(π⁄3)=Io×√3⁄2. Grâce à la combinaison vectorielle du champ magnétique, le champ magnétique total est 1,5 fois supérieur au champ produit par une seule bobine ((√3⁄2)2×2=1,5). Lorsque tous les courants de phase sont sinusoïdaux, quelle que soit la position de l'aimant permanent, la taille du champ magnétique composite vectoriel est toujours 1,5 fois celle d'une bobine simple, et le champ magnétique forme un angle de 90° avec le champ magnétique de l'aimant permanent.
3) Après une nouvelle rotation de 30°, le courant Io/2 entre dans la bobine 1, le courant Io/2 entre dans la bobine 2 et le courant Io sort de la bobine 3.
L'extérieur de la bobine 1 devient le pôle S, l'extérieur de la bobine 2 devient également le pôle S et l'extérieur de la bobine 3 devient le pôle N. Lors de la combinaison des vecteurs, le champ magnétique généré est 1,5 fois supérieur au champ magnétique produit par le passage du courant Io dans une seule bobine (comme dans ①). Un champ magnétique composite est également formé ici à un angle de 90° par rapport au champ de l'aimant permanent, tournant dans le sens des aiguilles d'une montre.
Pour les étapes 4 à 6, effectuer la rotation de la même manière que pour les étapes 1 à 3.
Ainsi, en commutant séquentiellement le courant circulant dans la bobine en fonction de la position de l'aimant permanent, ce dernier tournera dans un sens fixe. De même, si le courant est inversé et que la direction du champ magnétique synthétique est inversée, il tournera dans le sens inverse des aiguilles d'une montre.
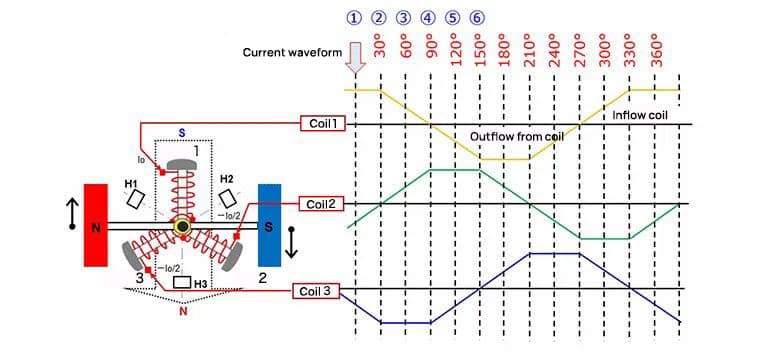
Le diagramme ci-dessous affiche en continu le courant pour chaque bobine à chacune des étapes 1 à 6 susmentionnées. L'introduction ci-dessus permet de comprendre la relation entre les changements de courant et la rotation.
Moteur pas à pas
Le moteur pas à pas est un type de moteur qui peut se synchroniser avec précision avec des signaux d'impulsion pour contrôler les angles de rotation et la vitesse. Il est également connu sous le nom de "moteur à impulsions".
Le moteur pas à pas, qui ne nécessite pas de capteur de position et peut assurer un positionnement précis grâce à un contrôle en boucle ouverte, est largement utilisé dans les équipements qui nécessitent une localisation précise.
Structure d'un moteur pas à pas (bipolaire biphasé)
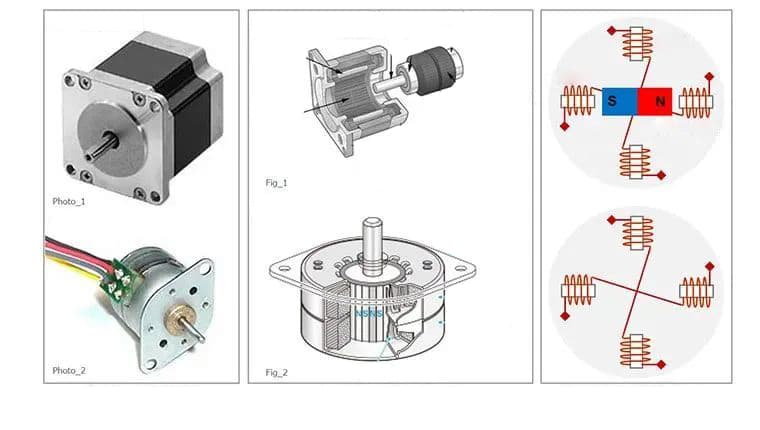
Les images ci-dessous, de gauche à droite, montrent un exemple de l'aspect extérieur d'un moteur pas à pas, un diagramme simple de sa structure interne et un schéma conceptuel de sa conception.
Les exemples extérieurs fournis sont des moteurs pas à pas de type HB (hybride) et PM (aimant permanent). Les diagrammes du milieu décrivent également les structures des types HB et PM.
Les moteurs pas à pas sont structurés avec des bobines fixes et un aimant rotatif. Le schéma conceptuel de droite de la structure interne du moteur pas à pas illustre un exemple de moteur PM utilisant deux phases (deux jeux) de bobines. Dans les exemples de structure de base des moteurs pas à pas, les bobines sont placées à l'extérieur et l'aimant permanent est placé à l'intérieur. Outre les moteurs à deux phases, il existe également des types de moteurs comportant un plus grand nombre de phases, tels que les moteurs triphasés et les moteurs à cinq phases.
Certains moteurs pas à pas ont des structures distinctes, mais pour expliquer leurs principes de fonctionnement, cet article présente la structure de base des moteurs pas à pas. Cet article vise à faire comprendre que les moteurs pas à pas adoptent principalement une structure avec des bobines fixes et un aimant permanent rotatif.
Principe de fonctionnement de base des moteurs pas à pas (excitation monophasée)
Le diagramme suivant est utilisé pour expliquer le principe de fonctionnement de base des moteurs pas à pas. Il s'agit d'un exemple d'excitation monophasée (un jeu de bobines) des bobines bipolaires biphasées mentionnées ci-dessus. La prémisse du diagramme est le changement d'état de ① à ④. Les bobines sont la bobine 1 et la bobine 2. En outre, la flèche du courant représente la direction du flux de courant.
①Diriger le courant vers le côté gauche de la bobine 1 et vers le côté droit. Évitez que le courant ne passe par la bobine 2. En conséquence, le côté intérieur de la bobine gauche 1 devient N (nord), tandis que le côté intérieur de la bobine droite 1 devient S (sud). Par conséquent, l'aimant permanent du milieu est attiré par le champ magnétique de la bobine 1, adopte un état avec S à gauche et N à droite, et s'arrête.
② Ensuite, on arrête le courant dans la bobine 1, en le faisant entrer par le haut de la bobine 2 et sortir par le bas. La face interne de la bobine supérieure 2 devient alors N, et la face interne de la bobine inférieure 2 devient S. L'aimant permanent est attiré par ce champ magnétique, tourne de 90 degrés dans le sens des aiguilles d'une montre et s'arrête.
③Par la suite, on arrête le courant dans la bobine 2, en le faisant entrer par le côté droit de la bobine 1 et sortir par le côté gauche. La face interne de la bobine gauche 1 devient S, et la face interne de la bobine droite 1 devient N. L'aimant permanent est à nouveau attiré par ce champ, tourne encore de 90 degrés dans le sens des aiguilles d'une montre et s'arrête.
④Finalement, arrêtez le courant dans la bobine 1, en le faisant entrer par le bas de la bobine 2 et sortir par le haut. La face interne de la bobine supérieure 2 devient S, tandis que la face interne de la bobine inférieure 2 devient N. Une fois de plus, l'aimant permanent est attiré par ce champ magnétique, tournant de 90 degrés dans le sens des aiguilles d'une montre et s'arrêtant.
En commutant le flux de courant à travers les bobines dans la séquence ci-dessus (① à ④) par l'intermédiaire d'un circuit électronique, le moteur pas à pas peut être mis en rotation. Dans cet exemple, chaque action de commutation fait tourner le moteur pas à pas de 90 degrés.
En outre, le maintien d'un flux de courant continu à travers une bobine spécifique permet au moteur de rester à l'arrêt tout en maintenant le couple. Par ailleurs, l'inversion de l'ordre de passage du courant dans les bobines peut faire tourner le moteur pas à pas dans le sens inverse.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Vous êtes-vous déjà demandé ce qui permet à un moteur électrique de fonctionner sans surchauffe ? Il est essentiel de comprendre les températures de fonctionnement sûres des moteurs pour assurer leur longévité et leurs performances. Dans cet article,...
Vous êtes-vous déjà demandé comment les trains pouvaient flotter au-dessus des rails ou comment les robots pouvaient effectuer des mouvements précis ? Cet article dévoile le monde fascinant des moteurs linéaires, en expliquant leurs principes, leurs types et leurs avantages uniques. ....
Vous êtes-vous déjà demandé pourquoi votre moteur électrique avait parfois du mal à démarrer en douceur ? Des courants de démarrage élevés peuvent soumettre votre système électrique à des contraintes importantes, entraînant des défaillances et des inefficacités potentielles. Cet article...
Comment déterminer le niveau maximum de vibrations pour les roulements de moteurs électriques ? Cette question cruciale concerne à la fois les limites opérationnelles et les essais après installation. L'article explore les normes internationales et nationales...
Il y a quelques jours, un ingénieur s'est interrogé sur la sélection des lubrifiants pour les roulements. Les fabricants de lubrifiants avaient fourni une pléthore d'indicateurs de performance, mais la signification de ces paramètres...
Le choix des roulements appropriés pour les moteurs verticaux présente des défis uniques en raison des différences structurelles par rapport aux moteurs horizontaux. Le processus de sélection doit tenir compte des charges axiales et radiales, des problèmes de lubrification...
1. Distinction entre la tige de poussée électrique et le cylindre électrique La tige de poussée électrique et le cylindre électrique sont généralement désignés sous le nom d'actionneurs électriques. Ils utilisent un moteur électrique pour entraîner...
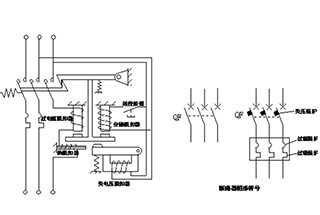
Vous êtes-vous déjà demandé ce qui assure la sécurité et la fiabilité des systèmes électriques de votre maison ? Les appareils électriques à basse tension, tels que les disjoncteurs et les contacteurs, jouent un rôle crucial à cet égard. Cet article démystifie les...
Vous êtes-vous déjà demandé ce qui différencie les moteurs à courant continu des moteurs à courant alternatif ? Dans cet article, nous explorons les différences fondamentales entre ces deux types de moteurs, y compris leurs principes de fonctionnement,...
Faites passer votre entreprise à la vitesse supérieure