Le guide ultime des codeurs : Types, applications et avantages
Vous êtes-vous déjà demandé comment les machines connaissaient précisément leur position et leur vitesse ? Cet article explore le monde fascinant des codeurs, des capteurs essentiels pour détecter les mouvements mécaniques. Vous découvrirez les différents types de codeurs, leurs principes de fonctionnement et leurs applications dans les machines modernes. Préparez-vous à découvrir les secrets de la précision des commandes de moteurs et bien plus encore !
Les codeurs sont un type de capteur utilisé principalement pour détecter la vitesse, la position, l'angle, la distance ou le nombre de mouvements mécaniques.
Outre leur utilisation dans les machines, de nombreuses commandes de moteurs, telles que les servomoteurs, nécessitent des codeurs pour fournir au contrôleur du moteur un retour d'information sur la commutation, la vitesse et la détection de la position.
2. Classification des codeurs
Le codeur peut être divisé en codeur analogique et codeur numérique. Le codeur analogique peut être divisé en transformateur rotatif et codeur Sin/Cos, tandis que le codeur numérique peut être divisé en codeur incrémental et codeur absolu.
3. Principes de fonctionnement des codeurs couramment utilisés
3.1 Principe des codeurs numériques
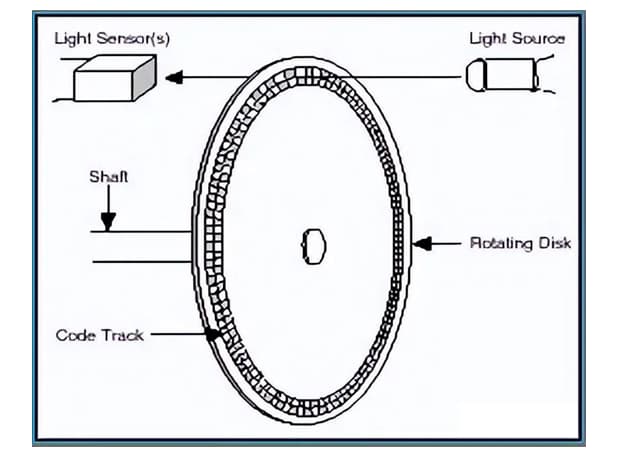
1)Utiliser des coupleurs photoélectriques pour scanner un disque segmenté installé sur un arbre mécanique.
Le code mécanique est converti en signaux d'impulsions électriques proportionnelles.
La source lumineuse (généralement une LED) émet un faisceau étroit de lumière vers le récepteur (qui peut être une photodiode). La source lumineuse et le récepteur sont strictement installés dans des parties fixes du palier de liaison rotatif.
Le codeur est un disque d'ombrage doté d'une ouverture ou d'une fenêtre transparente, qui est installé dans la partie rotative du roulement.
3.2 Principe des codeurs numériques photoélectriques
Lorsque le roulement tourne, le codeur permet au faisceau lumineux de passer alternativement (à travers la petite fenêtre du disque).
La photodiode émet des signaux de haut ou de bas niveau correspondant aux changements de position. La sortie de la photodiode peut être convertie en informations sur la position et la vitesse grâce à un circuit spécialisé.
3.2.1 Sortie des codeurs incrémentaux
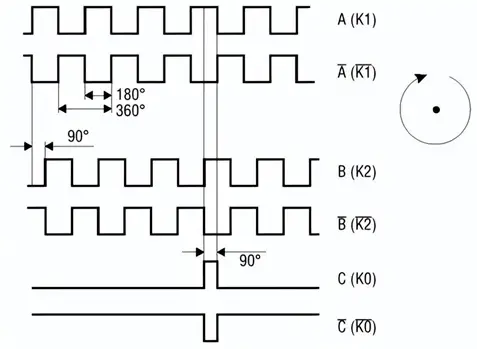
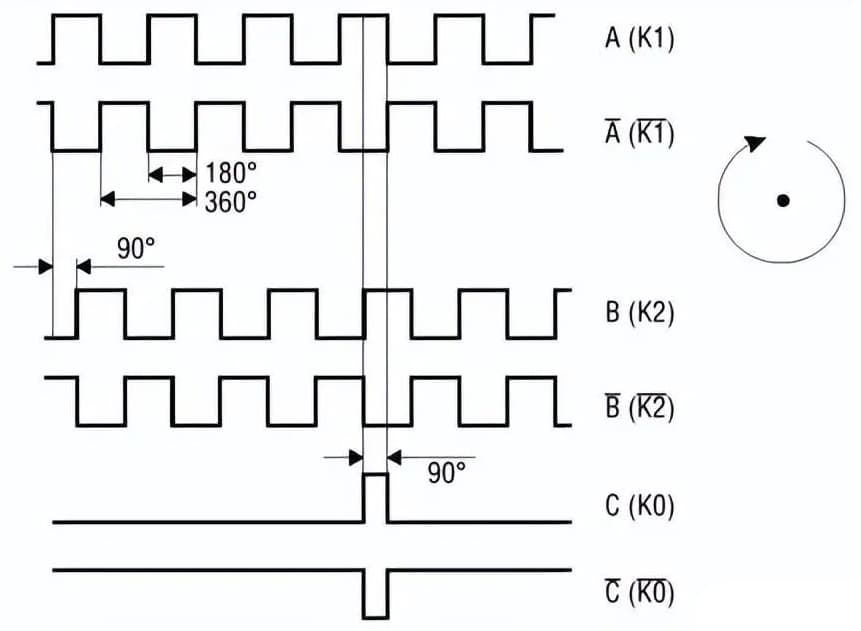
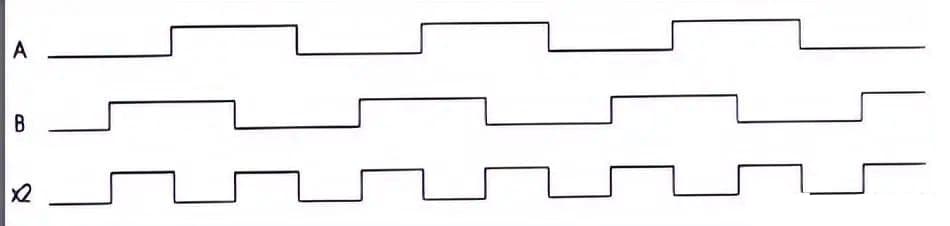
La sortie du codeur incrémental se compose d'un disque photoélectrique à axe central avec des marques circulaires transparentes et opaques, qui sont lues par des composants émetteurs et récepteurs photoélectriques pour obtenir des signaux rectangulaires combinés comme A, B, -A, -B.
Chaque paire de signaux présente une différence de phase C de 90 degrés (un cycle équivaut à 360 degrés).
En outre, il existe un signal d'étalonnage du point zéro et le codeur émet un signal par rotation du disque.
Schéma de sortie d'un codeur incrémental
3.2.2 Principes de raccordement des codeurs incrémentaux
1. Connexion monophasée
Utilisé pour le comptage unidirectionnel et la mesure de la vitesse unidirectionnelle.
2. Connexion biphasée A-B
Utilisé pour le comptage bidirectionnel et la détermination de la direction et de la vitesse.
3. Connexion triphasée A-B-C
Utilisé pour déterminer la vitesse avec correction de la position de référence.
La connexion A-A-B-B-C-C a un courant de connexion de signal négatif symétrique, qui a une atténuation minimale et une forte anti-interférence, et peut être émise sur de longues distances.
Comment déterminer la direction
Comme A et B sont déphasés de 90 degrés, la direction peut être déterminée en détectant si A ou B se produit en premier.
Comment effectuer l'étalonnage de la position zéro
Lors de la transmission des impulsions du codeur, des erreurs peuvent se produire pour des raisons telles que des interférences, ce qui entraîne des erreurs de transmission.
Il est alors nécessaire d'effectuer un étalonnage de la position zéro en temps voulu.
Le codeur C émet une impulsion à chaque rotation, appelée impulsion zéro ou impulsion d'identification, qui est utilisée pour déterminer la position zéro ou la position d'identification.
Pour mesurer avec précision l'impulsion zéro, quel que soit le sens de rotation, l'impulsion zéro est émise sous la forme d'une combinaison de haut niveau de deux canaux.
En raison de la différence de phase entre les canaux, l'impulsion zéro n'est que la moitié de la longueur de l'impulsion.
Schéma de la correction du point zéro
3.2.3 Multiplicateur des codeurs incrémentaux
En raison de limitations technologiques et d'échantillonnage, il est impossible de réaliser une division physique plus fine et plus précise du disque d'encodage.
Cependant, il est possible d'obtenir des impulsions plus élevées en convertissant le circuit numérique.
Signal à double fréquence
Obtenu par conversion "exclusive ou" des phases A et B.
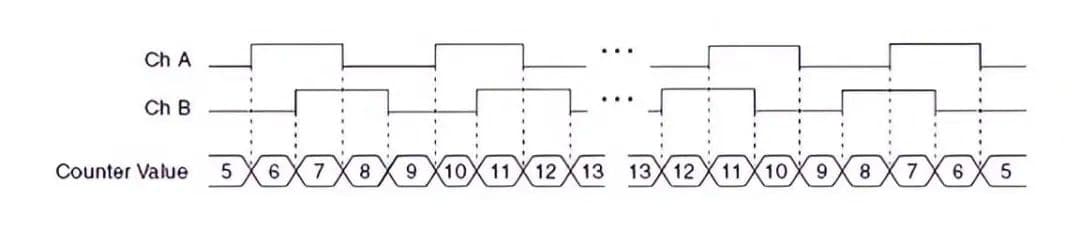
Signal à quadruple fréquence
Le compteur augmente ou diminue également à chaque bord des canaux A et B. La direction du compteur est déterminée par le canal qui précède l'autre.
Le nombre dans le compteur augmente ou diminue de 4 à chaque cycle.
3.2.4 Caractéristiques des codeurs incrémentaux
Le codeur émet un signal d'impulsion pour chaque angle de rotation prédéfini, et l'angle de rotation est calculé en comptant le nombre de signaux d'impulsion.
Par conséquent, les données de position émises par le codeur sont relatives.
Comme un signal d'impulsion fixe est utilisé, la position de départ de l'angle de rotation peut être fixée arbitrairement.
En raison de l'utilisation du codage relatif, les données relatives à l'angle de rotation seront perdues et devront être réinitialisées après une coupure de courant.
3.2.5 Problèmes liés aux codeurs incrémentaux
1) Les codeurs incrémentaux ont des erreurs cumulées au point zéro.
2) Ils ont une faible capacité anti-interférence.
3) L'appareil récepteur doit être mis hors tension et la position de référence doit être retrouvée après des coupures de courant ou des arrêts.
L'apparition des codeurs absolus résout ces problèmes.
3.3 Principe du codeur absolu
Un codeur absolu possède un disque de code lumineux sur lequel sont gravés plusieurs canaux lumineux et lignes.
Chaque canal est codé en utilisant 2, 4, 8, 16, etc. lignes en séquence.
À chaque position du codeur, les canaux lumineux sont lus et leur état activé/désactivé est utilisé pour obtenir un code binaire unique, connu sous le nom de code Gray, allant de 2^0 à 2^(n-1), où n est le nombre de bits du codeur absolu.
La position de l'encodeur est déterminée mécaniquement par le disque à code lumineux, de sorte qu'elle n'est pas affectée par les coupures de courant ou les interférences.
3.3.1 Disque de code du codeur absolu
Le disque de code lumineux est scanné par un groupe de coupleurs photoélectriques pour obtenir le code unique à chaque position. Chaque position a son propre code unique.
Les codes de sortie des codeurs absolus sont les suivants
Les nombres entiers adjacents dans sa représentation numérique n'ont qu'une seule différence, ce qui permet d'éviter l'apparition d'un courant de pointe important dans le circuit de conversion numérique (tel que 3-4, 0011-0100).
Format de conversion des codes binaires en codes gris :
Les chiffres les plus élevés sont conservés et le deuxième chiffre le plus élevé est obtenu en effectuant une opération "exclusive ou" sur les chiffres les plus élevés et le deuxième chiffre le plus élevé (en binaire).
Référence pour les codes décimaux et Gray.
Décimale
Code gris
0
0000
1
0001
2
0011
3
0010
4
0110
5
0111
6
0101
7
0100
Décimale
Code gris
8
1100
9
1101
10
1111
11
1110
12
1010
13
1011
14
1001
15
1000
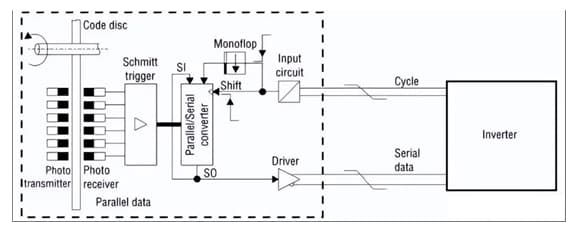
3.3.2 Formats de sortie des codeurs absolus
1. Mode de sortie parallèle
Dans ce mode, il y a un câble pour chaque bit de données (canal binaire), et le niveau du signal (haut ou bas) sur chaque câble représente un 1 ou un 0.
Le dispositif physique est similaire à un codeur incrémental et possède différents types tels que collecteur ouvert PNP, NPN, entraînement différentiel, push-pull, et différentiel haut ou bas effectif basé sur le format du dispositif physique.
La sortie parallèle se présente généralement sous la forme d'un code Gray, également appelé codeur Gray.
2. Sortie de l'interface série synchrone (SSI)
Dans ce mode, les données sont concentrées et transmises par un groupe de câbles. La sortie des données est commandée par un protocole de communication qui spécifie la synchronisation.
La sortie série utilise moins de lignes de connexion et peut être transmise sur de plus longues distances, ce qui améliore considérablement la protection et la fiabilité du codeur.
Les codeurs absolus à haut débit et les codeurs absolus multitours utilisent généralement une sortie série.
3. Format série asynchrone
Dans ce mode, les instructions et les données sont échangées par le biais de questions et de réponses, et l'interface est duplex. Un exemple typique est l'interface RS485, qui ne nécessite que deux câbles.
Le contenu des données peut être la valeur de la position du codeur ou tout autre contenu demandé par l'instruction.
Par exemple, si une adresse est ajoutée pour chaque codeur, plusieurs codeurs peuvent partager le câble de transmission et la réception ultérieure. Cette forme est appelée "bus de terrain".
4. Principe du codeur hybride
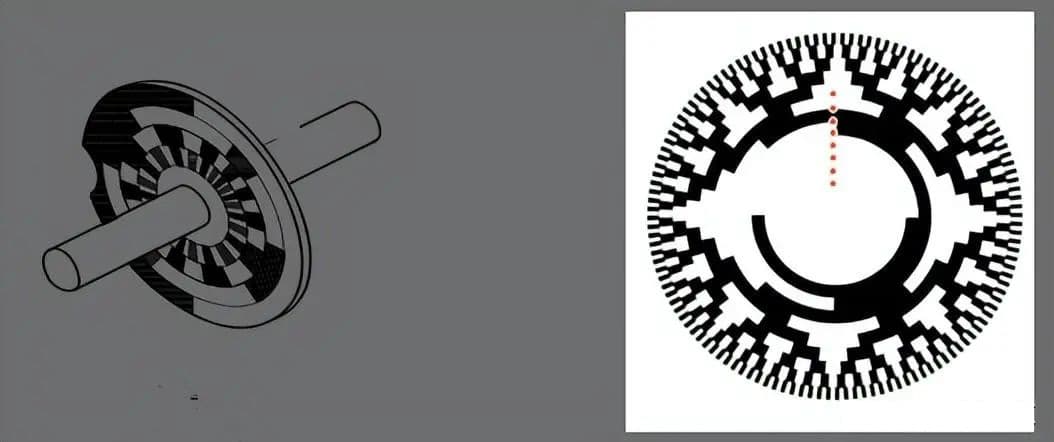
Le codage incrémental et le codage absolu sont tous deux intégrés sur le même disque.
Le cercle extérieur du disque contient des bandes incrémentales à haute densité, tandis que la partie centrale est le canal du code Gray binaire du codeur absolu.
La rotation du disque est indiquée en comptant le nombre d'impulsions par rotation, et l'angle tourné en une semaine est compté en utilisant la valeur numérique du code Gray.
Codeur absolu multitour : basé sur le codeur absolu monotour, le principe du mécanisme d'engrenage de l'horloge est utilisé pour transmettre la rotation du disque central à un autre ensemble de disques (ou plusieurs ensembles d'engrenages et de disques) par transmission d'engrenage, ce qui ajoute le codage du nombre de tours sur la base du codage monotour afin d'étendre la plage de mesure du codeur.
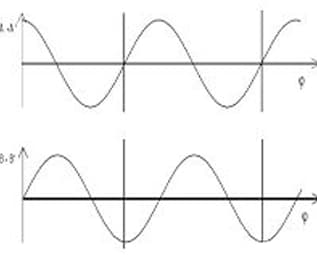
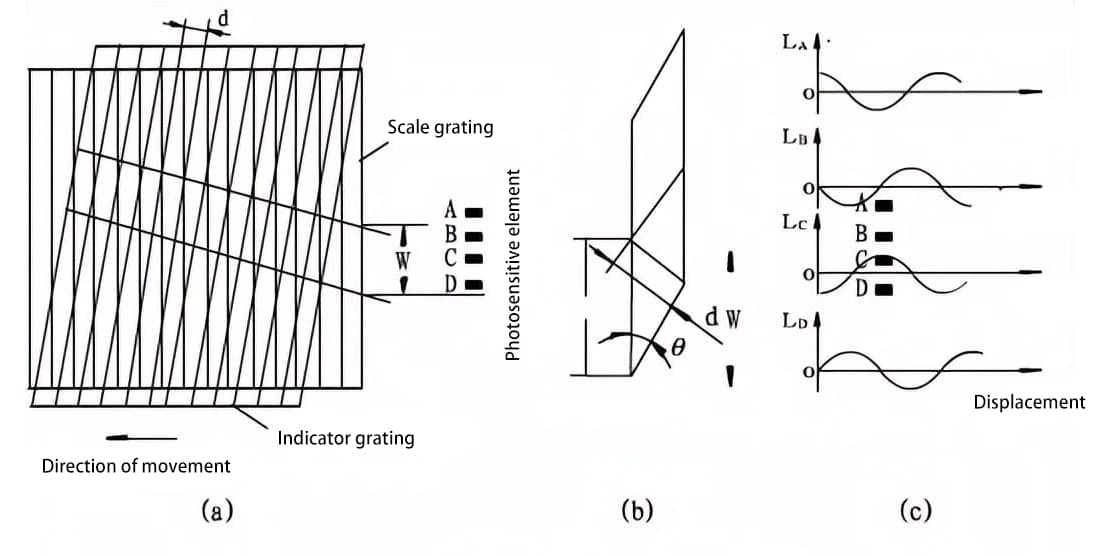
Lorsqu'une lumière parallèle traverse un réseau, l'intensité des franges de Moiré produites se rapproche d'une fonction cosinus.
En plaçant quatre franges de moiré 1/4 d'éléments photosensibles dans la direction du mouvement de la frange de moiré, il est possible d'obtenir quatre ensembles de signaux de sortie sinusoïdaux et cosinusoïdaux.
Forme de sortie du codeur sinus-cosinus
Figure Principe de fonctionnement du réseau
Codeur linéaire
Un codeur linéaire mesure la distance linéaire d'un objet et convertit la distance mesurée en un signal électrique pulsé.
En termes simples, le principe consiste à étirer le disque d'un codeur rotatif en une ligne droite.
Codeur à échelle de réseau
Le principe de fonctionnement du capteur de déplacement de réseau est le suivant : lorsque le réseau principal (c'est-à-dire le réseau d'échelle) et le réseau auxiliaire (c'est-à-dire le réseau indicateur) de la paire de réseaux sont relativement déplacés, l'interférence et la diffraction de la lumière produisent un motif rayé régulier en noir et blanc (ou clair-obscur), appelé frange de Moiré.
Les bandes noires et blanches (ou claires et foncées) qui sont identiques sont converties en signaux électriques à onde sinusoïdale par des dispositifs photoélectriques.
Après amplification et mise en forme par des circuits de mise en forme, deux signaux sinusoïdaux ou carrés avec une différence de phase de 90 degrés sont obtenus et envoyés à l'afficheur numérique à réseau pour le comptage et l'affichage.
Transformateur rotatif
Un transformateur rotatif, également appelé résolveur, est un type de micromoteur utilisé à des fins de contrôle.
Il s'agit d'un dispositif de mesure indirecte qui convertit la rotation mécanique en un signal électrique lié à l'angle de rotation par une certaine fonction mathématique.
Principe du transformateur rotatif
1. Un transformateur rotatif est un composant de signal qui délivre une tension variant avec l'angle du rotor.
Lorsque l'enroulement d'excitation est excité par une tension alternative d'une certaine fréquence, l'amplitude de la tension de l'enroulement de sortie est en relation sinusoïdale ou cosinusoïdale avec l'angle du rotor, ou maintient une certaine relation proportionnelle, ou a une relation linéaire avec l'angle du rotor dans une certaine plage.
2. La distribution du flux magnétique entre le stator et le rotor du transformateur rotatif suit une règle sinusoïdale.
Par conséquent, lorsque la tension d'excitation est appliquée à l'enroulement du stator, l'enroulement du rotor génère une force électromotrice induite par couplage électromagnétique, comme le montre la figure ci-dessus.
L'amplitude de la tension de sortie dépend de la position angulaire du rotor et varie donc de façon sinusoïdale avec le déplacement du rotor.
Selon le principe du transformateur, en supposant que le nombre de spires dans l'enroulement primaire est N1 et le nombre de spires dans l'enroulement secondaire est N2, k = N1 / N2 est le rapport des spires. Lorsqu'une tension alternative est appliquée à l'enroulement primaire
Application du transformateur rotatif
1. Mode de détection de phase
L'angle de phase de la tension induite est égal à l'angle de rotation mécanique du rotor.
Par conséquent, tant que l'angle de phase de la tension de sortie du rotor est détecté, l'angle de rotation du rotor est connu.
2. Mode de détection de l'amplitude
Dans les applications pratiques, en modifiant continuellement l'angle électrique de la tension de modulation, la variation de l'angle mécanique peut être suivie, et l'amplitude de la tension induite peut être mesurée pour obtenir le déplacement de l'angle mécanique.
5. Précautions d'installation des codeurs
Aspects mécaniques :
1. Faire attention à la charge admissible sur l'arbre lors de l'installation ;
2. S'assurer que la différence d'axe entre l'arbre du codeur et l'arbre de l'utilisateur est suffisante. arbre de sortie est inférieur à 0,20 mm et l'angle de déviation par rapport à l'axe est inférieur à 1,5° ;
3. Pendant l'installation, évitez les chocs, les chutes et les collisions afin de ne pas endommager l'arbre et le disque ;
4. En cas d'utilisation prolongée, vérifier régulièrement (une fois par trimestre) si les vis de fixation du codeur ne sont pas desserrées.
Aspects électriques :
1)Le fil de terre doit être aussi épais que possible, généralement supérieur à 1,5 millimètre carré ;
2)Les fils de sortie du codeur ne doivent pas se chevaucher pour éviter d'endommager le circuit de sortie ;
3)Les fils de signal du codeur ne doivent pas être connectés à un courant continu ou alternatif afin d'éviter d'endommager le circuit de sortie ;
4)L'équipement, tel que les moteurs, connecté au codeur doit être bien mis à la terre et exempt d'électricité statique.
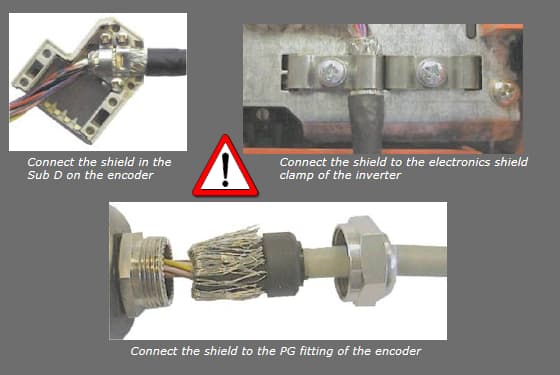
6. Installation du câble de blindage du codeur.
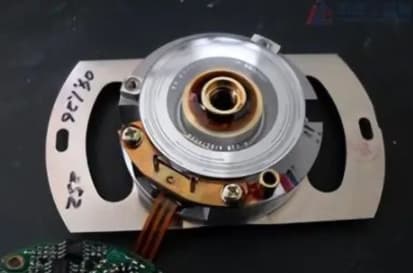
Schéma de la structure interne d'un codeur rotatif.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Imaginez qu'une simple surface en verre vous permette d'accéder à la précision des machines-outils. C'est exactement ce que font les échelles à réseaux linéaires, qui transforment les lignes fines en mesures extrêmement précises. Cet article explore comment ces...
Vous êtes-vous déjà demandé comment les arêtes vives des pièces métalliques sont adoucies ? Ce processus, connu sous le nom de chanfreinage, transforme les angles dangereux et irréguliers en surfaces angulaires plus sûres. Dans cet article, vous...
Vous êtes-vous déjà demandé quelles marques de roulements étaient les meilleures au monde ? Dans cet article de blog, nous allons explorer les principaux fabricants de roulements connus pour leur qualité exceptionnelle, leur...
Vous êtes-vous déjà demandé qui alimente le monde en coulisses ? Dans cet article de blog, nous allons nous plonger dans les principaux fabricants de générateurs qui maintiennent les lumières allumées...
Vous êtes un futur ingénieur en mécanique et vous souhaitez exceller dans votre domaine ? Dans cet article de blog, nous allons explorer les 10 logiciels de conception d'ingénierie mécanique les plus importants qui peuvent...
Vous êtes-vous déjà demandé comment l'intégrité des écrous et des vis soudés de votre voiture était garantie ? Cet article révèle le processus méticuleux des contrôles de qualité et des inspections qui permettent à votre véhicule...
Vous êtes-vous déjà demandé ce qui permet à un moteur électrique de fonctionner sans surchauffe ? Il est essentiel de comprendre les températures de fonctionnement sûres des moteurs pour assurer leur longévité et leurs performances. Dans cet article,...
Vous êtes-vous déjà interrogé sur le monde fascinant du moulage ? Ce processus de fabrication ancien, mais en constante évolution, façonne notre vie quotidienne d'innombrables façons. Dans cet article de blog, nous explorerons les...
Vous êtes-vous déjà demandé comment les engrenages de votre voiture ou de votre avion fonctionnaient si bien ? Cet article dévoile les principaux fabricants d'engrenages qui façonnent l'avenir de l'ingénierie mécanique. Vous apprendrez...
Faites passer votre entreprise à la vitesse supérieure