Moteurs pour véhicules électriques : Types, structures et analyse des performances
Qu'est-ce qui alimente votre véhicule électrique ? Des moteurs asynchrones à courant alternatif aux moteurs synchrones à aimant permanent, en passant par les moteurs à réluctance commutée, chaque type de moteur présente des avantages et des inconvénients uniques. Cet article explore les structures, les principes et les applications de ces principaux types de moteurs, pour vous aider à comprendre comment ils influencent les performances et l'efficacité des véhicules électriques. Plongez dans cet article pour découvrir quel moteur pourrait équiper votre prochain véhicule !
Sur la base des exigences fondamentales de performance du moteur d'entraînement pour les véhicules à énergie nouvelle, les types de moteurs d'entraînement couramment utilisés sont divisés en trois catégories principales : les moteurs asynchrones à courant alternatif, les moteurs synchrones à aimant permanent et les moteurs à réluctance commutée.
Actuellement, chaque modèle de voiture équipé par les différents constructeurs automobiles utilise différents types de moteurs d'entraînement.
Par conséquent, pour choisir le type de moteur pour un véhicule à énergie nouvelle, il est important de comprendre la structure, le principe de fonctionnement, les avantages et les inconvénients du moteur d'entraînement.
I. Moteur asynchrone à courant alternatif
1. Structure du moteur asynchrone à courant alternatif
Le moteur asynchrone à courant alternatif, également appelé moteur à induction, se compose principalement d'un stator, d'un rotor, d'un arbre moteur, de roulements avant et arrière, d'un couvercle d'extrémité, d'un capteur de position, d'un capteur de température, d'un faisceau de câbles basse tension et d'un faisceau de câbles haute tension.
Le stator se compose du noyau de fer du stator et du bobinage triphasé ; le rotor utilise souvent un rotor à cage d'écureuil, qui comprend le noyau de fer du rotor et le bobinage à cage d'écureuil.
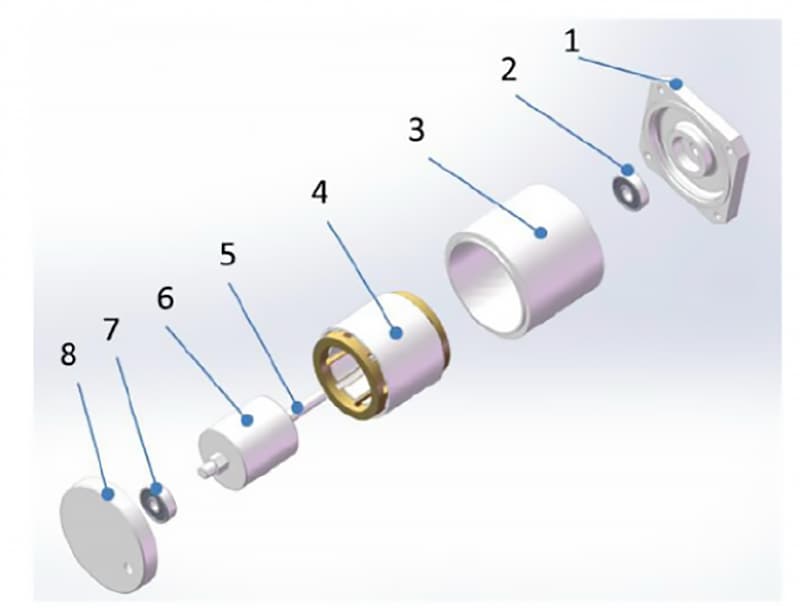
En fonction de la puissance du moteur, le choix se porte sur les méthodes de refroidissement par eau ou par air. (Figure 1)
Figure 1 Schéma structurel d'un moteur asynchrone à courant alternatif
1- Couvercle de l'extrémité avant 2- Palier avant 3- Boîtier du moteur 4- Rotor à cage d'écureuil 5- Arbre du moteur 6- Stator 7- Palier arrière 8- Couvercle de l'extrémité arrière 9- Capteur de position 10- Couvercle de maintenance du capteur
2. Principe de fonctionnement du moteur asynchrone à courant alternatif
(1) Principe de fonctionnement de l'entraînement par moteur asynchrone à courant alternatif
1) Le stator fournit un champ magnétique rotatif. Pour fournir un couple, le moteur asynchrone à courant alternatif doit faire passer un courant alternatif triphasé dans la bobine du stator, créant ainsi un champ magnétique en rotation continue (avec une vitesse de rotation du champ magnétique de ns).
Le moteur asynchrone à courant alternatif exige que les enroulements triphasés du stator soient symétriques et que le noyau de fer du stator soit espacé de 120 degrés électriques. Le courant qui traverse l'enroulement triphasé symétrique doit également être symétrique, avec la même taille, la même fréquence et une différence de phase de 120 degrés. La vitesse de rotation du champ magnétique tournant est donnée par l'équation (1).
ns=60f/p (1)
Dans cette équation, ns est la vitesse de rotation du champ magnétique tournant (également appelée vitesse de synchronisation), r/min ; f est la fréquence du courant alternatif triphasé, Hz ; p est le nombre de paires de pôles.
Pour un moteur d'entraînement conçu et mis en production, le nombre de paires de pôles est fixe, de sorte que le facteur déterminant la vitesse de rotation du champ magnétique est la fréquence du courant alternatif triphasé. La fréquence du réseau électrique dans notre pays étant de f=50Hz, il existe une relation linéaire entre la vitesse du moteur et le nombre de paires de pôles. (Figure 2)
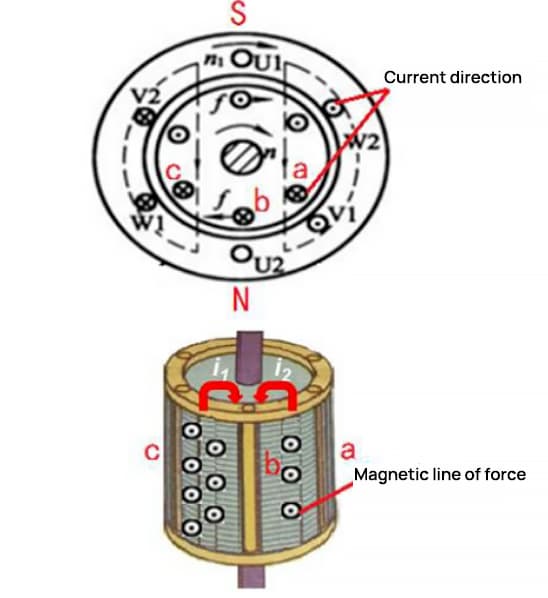
Figure 2 Diagramme du champ magnétique tournant des enroulements bipolaires du stator
2) Le rotor à cage d'écureuil produit des courants de Foucault induits. Comme le stator fournit un champ magnétique tournant, un courant de Foucault est induit sur le conducteur du rotor à cage d'écureuil, comme le montre la figure 3.
Figure 3 Courants de Foucault dans les enroulements du rotor à cage
Dans la zone magnétique entre les conducteurs c et b de l'enroulement en cage d'écureuil, il y a des lignes de force magnétiques vers l'extérieur, et ces lignes de force magnétiques sont renforcées sous l'action du champ magnétique tournant.
Par conséquent, un courant de Foucault i1 sera induit sur les conducteurs c, b ; de même, l'affaiblissement des lignes de force magnétiques dans la zone entre le conducteur a et le conducteur b induira un courant de Foucault i2 sur le conducteur.
Le courant sur le conducteur b, sous l'action du champ magnétique tournant du stator, soumet l'enroulement en cage d'écureuil du conducteur b à une force électromagnétique, ce qui amène le rotor à générer un couple électromagnétique et à commencer à tourner. Le rotor en rotation rattrape progressivement le champ magnétique tournant, tournant à une vitesse n légèrement inférieure à la "vitesse synchrone ns" du champ magnétique.
Ce phénomène, où la vitesse de rotation n du rotor est légèrement inférieure à la vitesse du champ magnétique ns du stator, est appelé glissement du rotor. Ce glissement asynchrone permet au conducteur du rotor à cage d'écureuil de couper continuellement les lignes de force magnétiques, produisant des courants de Foucault induits.
Par conséquent, sur le rotor, l'énergie électrique est convertie en énergie mécanique, assurant une production externe continue.
(2) Le principe de la production d'énergie dans les moteurs asynchrones à courant alternatif
Selon la loi de Faraday sur l'induction électromagnétique, lorsqu'une section du conducteur en circuit fermé traverse les lignes du champ magnétique en mouvement, un courant induit est généré à l'intérieur du conducteur, la force électromotrice générée étant appelée force électromotrice induite.
Dans un moteur asynchrone à courant alternatif, lorsque le moteur est utilisé comme générateur, le stator est alimenté par un courant triphasé pour fournir le champ magnétique, et l'enroulement du rotor fournit le conducteur.
Lorsqu'une force mécanique externe, telle que l'arbre d'entraînement d'une voiture, entraîne l'arbre du rotor, faisant ainsi bouger le rotor, si la vitesse du rotor est supérieure à la vitesse de synchronisation du champ magnétique rotatif du stator, le moteur asynchrone à courant alternatif agit alors comme un générateur.
Le sens dans lequel le rotor coupe le champ magnétique rotatif est opposé à celui dans lequel il fonctionne comme moteur d'entraînement, de sorte que le sens de la force électromotrice induite par le rotor est également inversé.
Au cours du processus de production d'énergie, le rotor du moteur subit un couple électromagnétique opposé à la force d'entraînement externe, ce qui entraîne une diminution de la vitesse du rotor.
3. Avantages, inconvénients et applications des moteurs asynchrones à courant alternatif
Les moteurs asynchrones à courant alternatif excellent dans la fourniture d'un couple de sortie réglable sur une large plage, capable d'augmenter fortement le couple de sortie sur de courtes périodes lors d'une accélération ou d'une montée. Les véhicules électriques entraînés par des moteurs synchrones à aimant permanent utilisent souvent des mécanismes de boîte de vitesses supplémentaires pour augmenter le couple afin d'accroître la vitesse.
Cependant, les moteurs asynchrones à courant alternatif présentent plusieurs inconvénients. En raison de l'excitation unilatérale, ils nécessitent des courants de démarrage plus importants et plus de courant par unité de couple produite. Le stator abrite des courants d'excitation réactifs, ce qui entraîne une consommation d'énergie plus élevée que les moteurs synchrones à aimant permanent, avec un facteur de puissance décalé.
Les conditions de surcharge se produisent fréquemment lors des entraînements à haut rendement. Leur structure relativement complexe exige une grande expertise en matière de technologie de contrôle, ce qui rend leur fabrication plus coûteuse, et leur densité de puissance est comparativement plus faible.
Actuellement, les moteurs asynchrones à courant alternatif sont couramment utilisés comme moteurs d'entraînement dans les véhicules électriques développés aux États-Unis.
II. Moteur synchrone à aimant permanent
1. Structure du moteur synchrone à aimant permanent
La structure d'un moteur synchrone à aimant permanent comprend un stator, un rotor, un arbre moteur, des paliers avant et arrière, un capuchon d'extrémité, un canal d'eau de refroidissement, un capteur de position, un capteur de température, un faisceau basse tension et un faisceau d'alimentation.
Le stator est formé par le noyau de fer du stator et les enroulements triphasés ; le rotor est constitué de pôles à aimant permanent et d'un noyau de fer, le noyau de fer étant constitué d'un empilement d'aimants permanents et d'un noyau de fer. tôles d'acier au silicium.
La disposition des aimants permanents dans le rotor comprend principalement des rotors à aimants permanents montés en surface, encastrés en surface et intérieurs, les rotors à aimants permanents intérieurs étant couramment utilisés dans les moteurs à énergie nouvelle. (Figure 4)
Figure 4 Schéma de principe d'un moteur synchrone à aimant permanent structure du moteur
1- Couvercle de l'extrémité avant 2- Roulement de l'extrémité avant 3- Boîtier du moteur 4- Stator 5- Arbre du moteur 6- Rotor à aimant permanent intégré 7- Roulement de l'extrémité arrière 8- Couvercle de l'extrémité arrière (capteur de position incorporé)
2. Principe de fonctionnement du moteur synchrone à aimant permanent
(1) Principe d'entraînement du moteur synchrone à aimant permanent
Le champ magnétique tournant est fourni par le stator, produit de la même manière et à la même vitesse qu'un moteur asynchrone à courant alternatif. Les pôles magnétiques sont fournis par les aimants permanents du rotor.
Ainsi, le champ magnétique rotatif généré par le stator forme un circuit avec les pôles de l'aimant permanent et le noyau de fer du rotor. Selon le principe de la réluctance magnétique minimale, c'est-à-dire que le flux magnétique se ferme toujours le long du chemin de moindre résistance magnétique, le rotor est entraîné en rotation par la force électromagnétique du champ tournant.
En conséquence, le rotor à aimant permanent tourne de manière synchrone avec le champ magnétique rotatif généré par le stator, entraînant ainsi la rotation de l'arbre du moteur.
(2) Principe de production d'énergie du moteur synchrone à aimant permanent
Conformément à la loi de Faraday sur l'induction électromagnétique, une partie du conducteur du circuit fermé est fournie par les enroulements triphasés du stator, le champ magnétique étant assuré par les aimants permanents du rotor.
Lorsque le couple externe entraîne la rotation du rotor, il génère un champ magnétique rotatif qui traverse une partie des conducteurs des enroulements triphasés du stator et induit un courant triphasé symétrique.
À ce stade, l'énergie cinétique du rotor est convertie en énergie électrique et le moteur synchrone à aimant permanent fonctionne comme un générateur.
3. Avantages, inconvénients et champ d'application du moteur synchrone à aimant permanent
Les avantages d'un moteur synchrone à aimant permanent sont sa petite taille, son poids léger, sa densité de puissance élevée, sa faible consommation d'énergie, sa faible élévation de température et son rendement supérieur à celui des moteurs asynchrones.
Il peut être conçu comme un moteur structuré à couple de démarrage élevé et à capacité de surcharge élevée en fonction des besoins.
Le moteur synchrone à aimant permanent est strictement synchronisé et présente une bonne réponse dynamique. Il convient à la régulation de la fréquence ; le couple et la vitesse du moteur peuvent être réglés sur une large plage en modifiant le courant et la fréquence.
Cependant, l'aimant permanent utilisé dans les moteurs synchrones à aimant permanent est généralement un matériau magnétique fort à base de néodyme, de fer et de bore, qui est relativement fragile et peut se fracturer sous l'effet de vibrations intenses.
En outre, l'utilisation d'un matériau à aimant permanent dans le rotor peut entraîner une décroissance magnétique dans le fonctionnement du moteur et des situations de surchauffe, ce qui se traduit par une diminution de la puissance.
Actuellement, les moteurs synchrones à aimant permanent sont largement utilisés dans les moteurs des véhicules à énergie nouvelle, les marchés de l'énergie nouvelle en Asie et en Europe utilisant principalement les moteurs synchrones à aimant permanent comme moteurs à énergie nouvelle.
III. Moteur à réluctance commutée
1. Structure du moteur à réluctance commutée
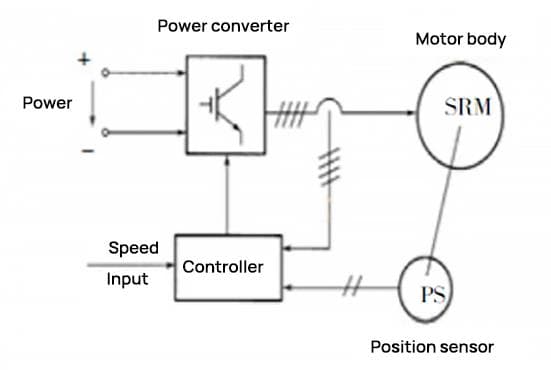
Le moteur à réluctance commutée (MRS) est un moteur mécatronique typique, également connu sous le nom de "système d'entraînement à réluctance commutée". Le moteur comprend principalement quatre composants : le MRS lui-même, un convertisseur de puissance, des capteurs de position du rotor et un contrôleur, comme le montre la figure 5.
Figure 5 Schéma fonctionnel du moteur à réluctance commutée
La structure principale du MRS comprend le stator, le rotor, les capteurs de position, les roulements avant et arrière, les embouts avant et arrière et le carter du moteur, comme le montre la figure 6. Le stator comprend le noyau du stator et les enroulements.
Figure 6 Structure du moteur à réluctance commutée
1- Couvercle de l'extrémité avant 2- Roulement de l'extrémité avant 3- Rotor 4- Arbre du moteur 5- Stator 6- Boîtier du moteur 7- Roulement de l'extrémité arrière 8- Couvercle de l'extrémité arrière 9- Capteur de position 10- Couvercle de maintenance du capteur 11- Ventilateur de refroidissement 12- Couvercle d'extrémité du ventilateur
Le noyau du stator et le rotor utilisent tous deux des structures à pôles saillants et sont constitués de tôles d'acier au silicium laminées. Les pôles saillants du stator sont équipés de bobinages, tandis que le rotor n'a ni bobinages ni aimants permanents.
La structure triphasée 6/4 pôles indique que le stator du moteur a six pôles saillants et que le rotor a quatre pôles saillants. Les enroulements concentrés sur deux pôles saillants symétriques du stator sont câblés en série pour former une phase, et le nombre de phases est égal au nombre de pôles saillants du stator divisé par deux, comme le montre la figure 7(a).
Figure 7 Structure des pôles saillants et du bobinage d'un moteur à réluctance commutée
La structure triphasée 12/8 pôles indique que le stator du moteur a douze pôles saillants et le rotor huit pôles saillants. Les enroulements de quatre pôles saillants symétriques du stator sont câblés en série pour former une phase, et le nombre de phases est égal au nombre de pôles saillants du stator divisé par quatre, comme le montre la figure 7(b).
Plus un moteur à réluctance commutée comporte de phases, plus l'angle de pas est faible, plus le fonctionnement est régulier et plus il est possible de réduire l'ondulation du couple. Cependant, la commande devient plus complexe, ce qui entraîne une augmentation du nombre de dispositifs de commutation principaux et des coûts.
Le calcul de l'angle de marche est indiqué dans l'équation (2) :
α = 360° × (Nombre de pôles du stator - Nombre de pôles du rotor) / (Nombre de pôles du stator)
Par exemple, pour un moteur triphasé à 6/4 pôles, l'angle de pas α = 360° × 2/(6×4) = 30°.
2. Principe de fonctionnement du moteur à réluctance commutée
(1) Principe de fonctionnement du moteur à réluctance commutée
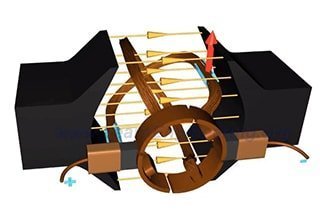
Comme le montre le schéma de fonctionnement du MRS triphasé 12/8 pôles de la figure 8, lorsque le courant de l'enroulement de la phase A commande la fermeture de l'interrupteur principal S1, S2, la phase A est alimentée et magnétisée.
Figure 8 Principe de fonctionnement du moteur à réluctance commutée
La force du champ magnétique générée à l'intérieur du moteur forme un champ magnétique radial dont l'axe est OA. Les lignes de force magnétiques de ce champ sont courbées lorsqu'elles traversent l'entrefer entre les pôles saillants du stator et les pôles saillants du rotor.
À ce moment, la réluctance magnétique du circuit magnétique est plus importante que lorsque le pôle saillant du stator et le pôle saillant du rotor coïncident. Par conséquent, le pôle saillant du rotor est soumis à l'attraction magnétique, qui aligne l'axe du pôle du rotor Oa sur l'axe du pôle du stator OA.
Cela génère un couple électromagnétique de réluctance magnétique, qui fait que le rotor commence à tourner dans le sens inverse des aiguilles d'une montre. Lorsque le courant de la phase A est coupé et que la source d'alimentation de la phase B est établie, le champ magnétique à l'intérieur du moteur tourne de 30 degrés.
Le rotor tourne alors de 15 degrés supplémentaires dans le sens inverse des aiguilles d'une montre sous l'action de l'attraction électromagnétique. Si les enroulements des phases A-B-C-A sont alimentés de manière séquentielle, le rotor tournera continuellement dans le sens inverse des aiguilles d'une montre.
Lorsque les enroulements du stator de chaque phase sont alimentés à tour de rôle, le champ magnétique du stator tourne de 3×30 degrés et le rotor tourne selon un pas de 3×15 degrés (c'est-à-dire 360 degrés / nombre de pôles saillants du rotor).
Si les enroulements de phase A-C-B-A sont alimentés de manière séquentielle, le rotor tournera dans le sens des aiguilles d'une montre. Le sens de rotation du moteur à réluctance commutée n'est pas lié au sens du courant mais est déterminé par la séquence de mise sous tension des enroulements de phase du stator.
Dans le fonctionnement réel des moteurs multiphasés, il est également courant que deux enroulements de phase ou plus soient alimentés simultanément.
(2) Principe de fonctionnement d'un générateur à réluctance commutée
L'état de fonctionnement d'un générateur à réluctance commutée implique trois conditions : l'état d'excitation, l'état de continuation et l'état de production d'énergie, comme le montre la forme d'onde de l'inductance de phase L dans la figure 10.
Figure 9 Schéma de l'état de fonctionnement d'un moteur à réluctance commutée
Figure 10 Variation de l'inductance de phase en fonction de la position du rotor
Dans la figure 9, l'angle θ est défini comme l'angle entre l'axe des pôles de la dent du rotor et l'axe de la fente de la dent du stator. Lorsque l'axe des pôles de la dent du rotor s'aligne sur l'axe correspondant de la fente de la dent du stator, l'inductance de phase est à son minimum (défini comme θ=0°). L'inductance de phase de l'enroulement reste constante à Lmin jusqu'à ce que le bord d'attaque du pôle du rotor rencontre le bord de fuite du pôle du stator (θ=θ1).
Lorsque le rotor continue à tourner et que le pôle du rotor commence à chevaucher le pôle du stator, jusqu'à ce que le bord de fuite du pôle du rotor et le bord de fuite du pôle du stator s'alignent complètement (à ce moment, θ=θ2), l'inductance de phase de l'enroulement augmente linéairement dans cette région, atteignant un maximum de Lmax.
Lorsque le rotor continue à tourner de telle sorte que le bord d'attaque du pôle du rotor s'aligne sur le bord d'attaque du pôle du stator (à ce moment, θ=θ4), l'inductance de phase reste à Lmax.
Selon la théorie de base du champ électromagnétique, l'existence d'un champ magnétique s'accompagne du couple électromagnétique du rotor du moteur, qui peut être représenté par l'équation (3).
Si les enroulements du moteur à réluctance commutée sont activés et désactivés entre θ3 et θ4, le moteur fonctionne comme un générateur. À ce moment, un courant se forme dans la zone d'inductance décroissante, donc dL/dθ<0.
Si le courant passe à travers les enroulements de phase à ce moment, un couple de freinage (T(θ, i)<0) est généré. Si une force mécanique externe maintient la rotation du moteur, le moteur absorbe l'énergie mécanique et la convertit en énergie électrique, ce qui indique que le moteur à réluctance commutée fonctionne en mode générateur.
3. Avantages, inconvénients et champ d'application des moteurs à réluctance commutée
Les avantages des moteurs à réluctance commutée sont leur structure simple et fiable, leurs bonnes performances au démarrage, leur rendement élevé et leur faible coût. Ils offrent un large éventail de possibilités de contrôle de la vitesse en faisant varier la conduction, les angles d'arrêt et la tension. Cependant, ils présentent des inconvénients tels qu'une ondulation importante du couple et un niveau de bruit élevé.
Actuellement, ils sont utilisés dans certains petits véhicules électriques, tels que les scooters électriques à quatre roues et les voitures de patrouille.
IV. Conclusion
Compte tenu des caractéristiques de performance distinctes requises par les moteurs de propulsion des véhicules à énergie nouvelle, le type de moteur d'entraînement choisi varie d'un modèle à l'autre sur le marché.
Cet article présente la structure et les principes de fonctionnement des moteurs d'entraînement à énergie nouvelle couramment utilisés, tels que les moteurs asynchrones à courant alternatif, les moteurs synchrones à aimant permanent et les moteurs à réluctance commutée. Ces informations permettront de mieux comprendre ces moteurs d'entraînement.
En outre, la structure et les principes de chaque type de moteur diffèrent, ce qui entraîne une large gamme d'applications. Conformément à la planification stratégique industrielle nationale, la recherche axée sur les systèmes d'entraînement électrique des véhicules à énergie nouvelle respectueux de l'environnement continuera à se développer. Par conséquent, la variété et le niveau technologique des moteurs continueront également à progresser.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Vous êtes-vous déjà demandé comment les trains pouvaient flotter au-dessus des rails ou comment les robots pouvaient effectuer des mouvements précis ? Cet article dévoile le monde fascinant des moteurs linéaires, en expliquant leurs principes, leurs types et leurs avantages uniques. ....
Les systèmes asservis font partie intégrante des produits électromécaniques, offrant le plus haut niveau de réponse dynamique et de densité de couple. C'est pourquoi la tendance dans le développement des systèmes d'entraînement est de remplacer les...
Vous êtes-vous déjà demandé ce qui différencie les moteurs à courant continu des moteurs à courant alternatif ? Dans cet article, nous explorons les différences fondamentales entre ces deux types de moteurs, y compris leurs principes de fonctionnement,...
Vous êtes-vous déjà demandé comment les machines transforment des forces invisibles en mouvements puissants ? Dans cet article de blog, nous allons explorer les mondes fascinants des transmissions pneumatiques et hydrauliques. Vous apprendrez comment ces...
Vous êtes-vous déjà demandé ce qui permet au monde de tourner sans à-coups ? Les héros méconnus des coulisses sont les roulements. Ces composants petits mais puissants jouent un rôle crucial dans la réduction des frottements...
Vous êtes-vous déjà demandé ce qui fait fonctionner les machines qui animent notre monde ? Les boîtes de vitesses sont les héros méconnus de nombreuses industries, de l'automobile à l'énergie éolienne. Dans cet article, vous explorerez...
Choisir le bon servomoteur pour votre projet peut s'avérer une tâche ardue, tant les options disponibles sont nombreuses. Cet article simplifie le processus en décomposant les éléments clés à prendre en compte : l'application...
Comment les moteurs électriques convertissent-ils l'électricité en mouvement ? Imaginez un monde où près de la moitié de l'énergie que nous consommons est fournie par ces moteurs. Cet article se penche sur la science des moteurs électriques, expliquant...
Imaginez le monde sans le ronronnement des moteurs : pas de voitures, pas d'appareils électroménagers, pas de machines industrielles. Les moteurs convertissent l'énergie électrique en énergie mécanique, alimentant tout, des jouets aux géants de la fabrication. Dans ce...
Faites passer votre entreprise à la vitesse supérieure