Guide complet des roulements linéaires : Tout ce qu'il faut savoir
Vous êtes-vous déjà demandé quelle était la clé d'un mouvement fluide et précis dans les machines ? Les roulements linéaires sont les héros méconnus d'innombrables systèmes automatisés, car ils permettent un transfert, une manipulation, un positionnement et un assemblage sans effort. Dans cet article de blog, nous allons plonger dans le monde des roulements linéaires, en les comparant à d'autres composants de mouvement linéaire et en révélant leurs avantages uniques. Préparez-vous à découvrir comment ces merveilles d'ingénierie peuvent révolutionner vos conceptions !
1. Roulements linéaires et autres composants de guidage du mouvement linéaire
Les composants de guidage linéaire sont les plus couramment utilisés dans les mécanismes de mouvement automatisés pour le transfert, la manutention, le positionnement et l'assemblage.
Nous comparerons ici les roulements linéaires, les guides coulissants et les bagues sans huile, et nous nous concentrerons sur l'utilisation des roulements linéaires.
(1) Comparaison des caractéristiques des roulements linéaires
Une comparaison approximative des caractéristiques des trois composants de guidage du mouvement linéaire est résumée dans le tableau ci-dessous.
Vous trouverez ci-dessous une introduction à la relation entre les caractéristiques susmentionnées et la construction.
(2) La corrélation entre les caractéristiques et la construction des pièces de guidage linéaire.
1. Différences de performance en ce qui concerne la capacité de charge :
Roulements linéaires et bagues autolubrifiantes.
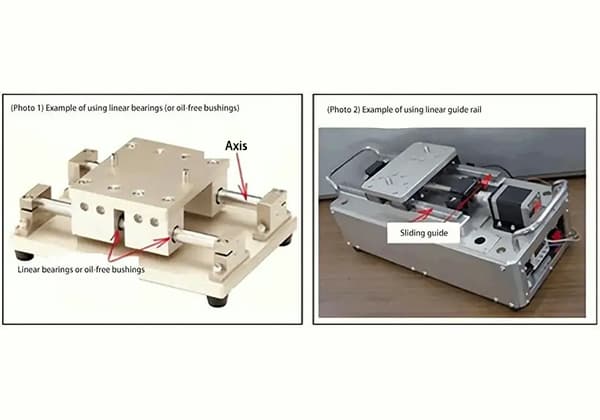
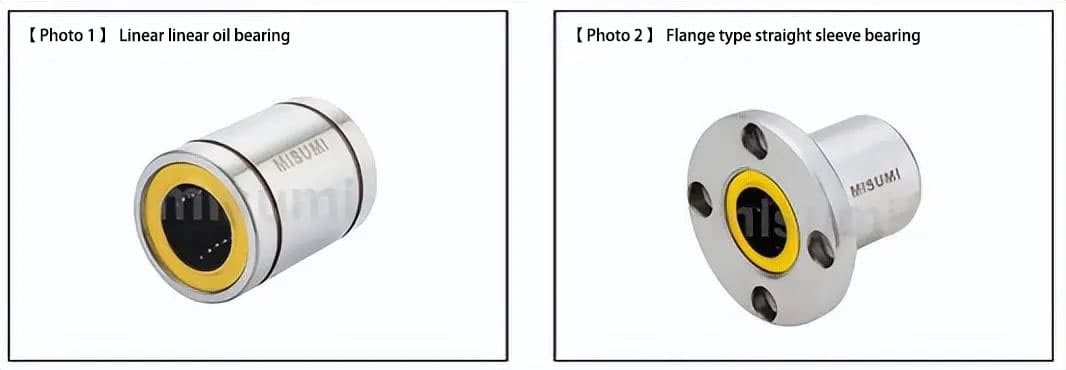
a) Les composants mobiles équipés de roulements linéaires ou de bagues autolubrifiantes sont généralement montés sur un arbre (rail de guidage) soutenu par des structures d'appui aux deux extrémités pour assurer leur fonction de mouvement. Lorsqu'il supporte des charges importantes, l'arbre se déforme facilement (voir [photo 1]).
(En outre, dans le cas d'un guidage vertical linéaire, une structure simple qui ignore la question de la charge peut être utilisée, car l'arbre n'a pas besoin de supporter la charge de l'élément mobile).
Guides linéaires
b) Les éléments mobiles se déplacent sur les rails de guidage fixes montés sur la base, qui présente d'excellentes caractéristiques de charge (voir [photo 2]).
Roulements linéaires et bagues autolubrifiantes => Mouvement linéaire sur un arbre (rail de guidage) fixé aux deux extrémités => mouvement linéaire avec des charges légères à moyennes.
Guides linéaires => Mouvement linéaire sur des rails de guidage fixés à la base => mouvement linéaire avec des charges légères à lourdes.
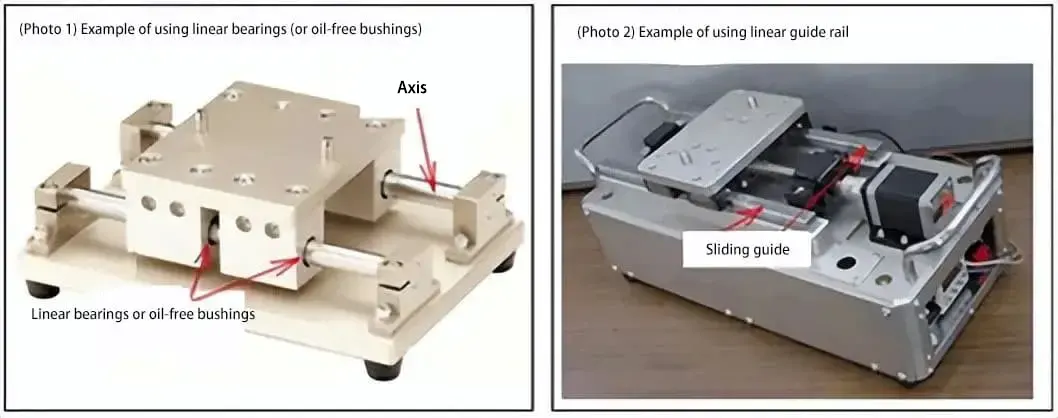
2. Différences de performance en ce qui concerne le coefficient de frottement :
Ici, les différences dans la méthode de guidage (roulement ou glissement superficiel) déterminent les différences de performance. La différence de coefficient de frottement est directement liée à la sélection de l'actionneur d'entraînement.
a) Faible résistance au frottement = faible force de frottement = peut être entraîné par un moteur à faible couple = le mouvement rotatif peut être converti en mouvement linéaire.
b) Grande résistance au frottement = grande force de frottement = nécessite un couple important ou un entraînement par poussée = peut être directement entraîné par un cylindre linéaire.
■ Précautions d'emploi
L'importance du coefficient de frottement affecte la capacité de l'équipement d'entraînement et la quantité de chaleur générée pendant le fonctionnement. Les bagues autolubrifiantes ne conviennent pas pour un fonctionnement continu à grande vitesse avec une forte production de chaleur.
Lors de l'utilisation d'un cylindre, la vitesse initiale et la vitesse d'arrêt ne peuvent pas être contrôlées comme avec un moteur. Le fonctionnement à grande vitesse et la suppression des vibrations peuvent être obtenus en installant des mécanismes de freinage flexibles tels que des amortisseurs de chocs et des amortisseurs.
3. Différences de performance en ce qui concerne la précision du guide :
En principe, la performance est déterminée par l'écart entre le roulement et le rail de guidage.
a) Dans le cas des roulements linéaires, un arbre cylindrique est utilisé comme rail de guidage, et l'espace entre le roulement et le rail de guidage est réglé sur "ajustement serré : g6" ou "ajustement de transition : h5", et le roulement glisse dans un état d'"espace" minimal.
b) Pour les guidages linéaires, des rails de guidage dédiés sont utilisés, et des roulements de haute précision et des rails de guidage à faible écart (0-3 μm) ou pressurisés (-3-0 μm) sont appariés.
c) Par rapport aux roulements linéaires, les bagues autolubrifiantes présentent un écart plus important entre le rail de guidage (l'arbre), ce qui se traduit par une précision moindre dans le guidage.
■ Précautions d'emploi
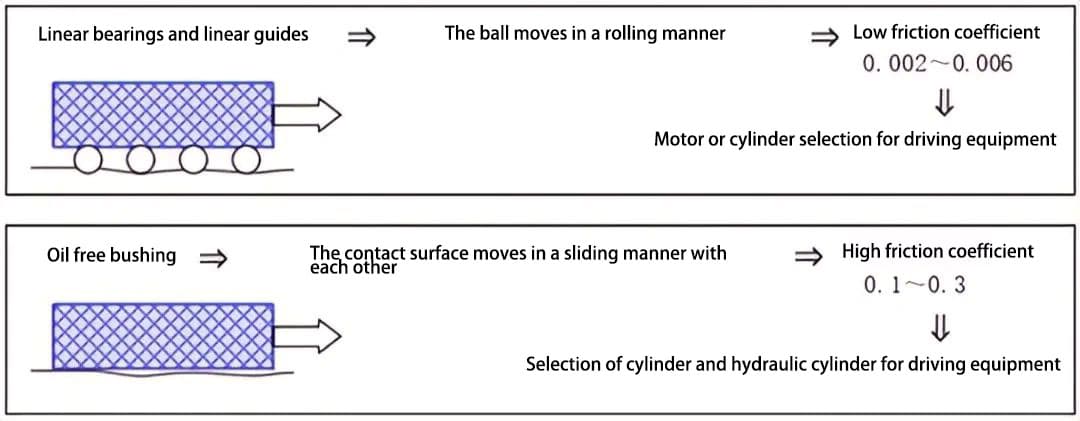
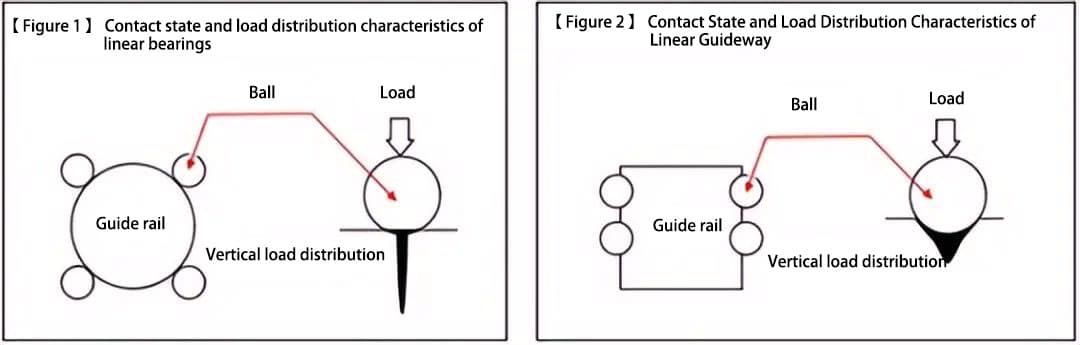
Les états de contact entre la bille et le rail de guidage sont différents pour les roulements linéaires et les guides linéaires. Les roulements linéaires ont un état de contact ponctuel, où la partie en contact supporte localement une charge importante.
La partie de contact entre le rail de guidage et le roulement à billes dans les guides linéaires adopte une forme de rainure, ce qui permet à la bille d'être en contact superficiel avec la surface du rail de guidage, et donc de disperser la charge de contact.
Il existe également des différences dans les caractéristiques de capacité de charge entre les deux en ce qui concerne l'état de contact dans la partie coulissante. ([Figure 1] et [Figure 2])
Roulements linéaires => état de contact ponctuel => répartition inégale de la charge verticale => ne convient pas aux conditions de charge élevée.
Guides linéaires => état de contact avec la surface => répartition dispersée de la charge verticale => peut supporter des charges relativement élevées.
4. La résistance à l'environnement et la facilité de maintenance :
Cette différence de performance est déterminée par les différences entre les matériaux constitutifs.
a) Les roulements et les guides linéaires peuvent atteindre une fiabilité à long terme grâce à l'effet de l'huile de lubrification (graisse), de sorte que l'environnement de travail ne peut pas dépasser l'indice de résistance environnementale de l'huile de lubrification.
b) Les bagues autolubrifiantes sont généralement utilisées dans des environnements où il n'y a pas d'eau potable. huile lubrifianteIls présentent une bonne résistance à l'environnement et une bonne facilité d'entretien.
2. Distinction entre les types linéaires et à brides
Nous expliquons ci-dessous les différences de formes extérieures des roulements linéaires (type linéaire et type à collerette) et les précautions à prendre lors du montage.
(1) Roulements linéaires de type linéaire et de type à bride
La [Photo 1] montre le type linéaire et la [Photo 2] le type à bride.
Le type de palier linéaire à bride [Photo 2] présente les avantages suivants :
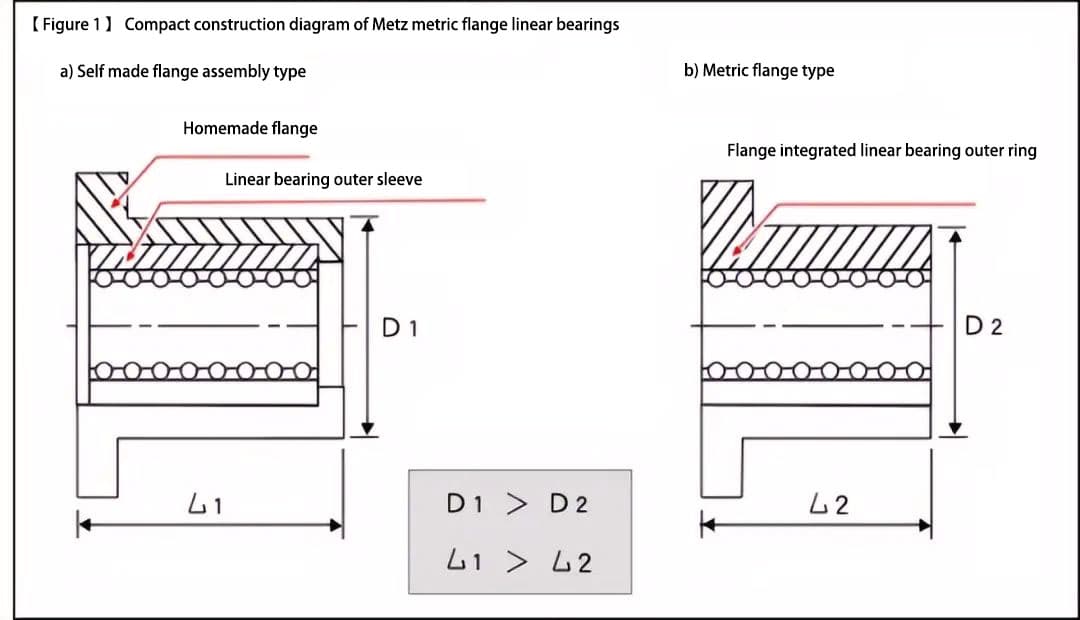
Il présente une structure plus compacte grâce à l'adoption d'une construction intégrée d'un roulement linéaire et d'une chemise d'arbre à bride ([Figure 1]).
Par rapport à un roulement linéaire combiné à une bride produite séparément, il présente des avantages tels qu'un faible coût, un délai de livraison court et une qualité stable.
La [figure 1] est un schéma expliquant la structure compacte du palier linéaire à bride. La structure d'assemblage du palier linéaire avec la bride et la forme de la chemise d'arbre sont trop longues, alors que le palier linéaire à bride adopte une structure intégrée, qui est plus compacte. Cette conception compacte permet de maintenir les performances de charge.
(2) Distinction entre les types linéaires et les types à bride
Choisir linéaire ou à bride les types de roulements selon les critères suivants : Choisir des roulements linéaires à bride s'ils sont porteurs.
Choisir en fonction de l'espace environnant et des surfaces de construction autour de l'installation des roulements linéaires. Se référer au point (3) pour les méthodes d'installation et les précautions concernant les roulements linéaires.
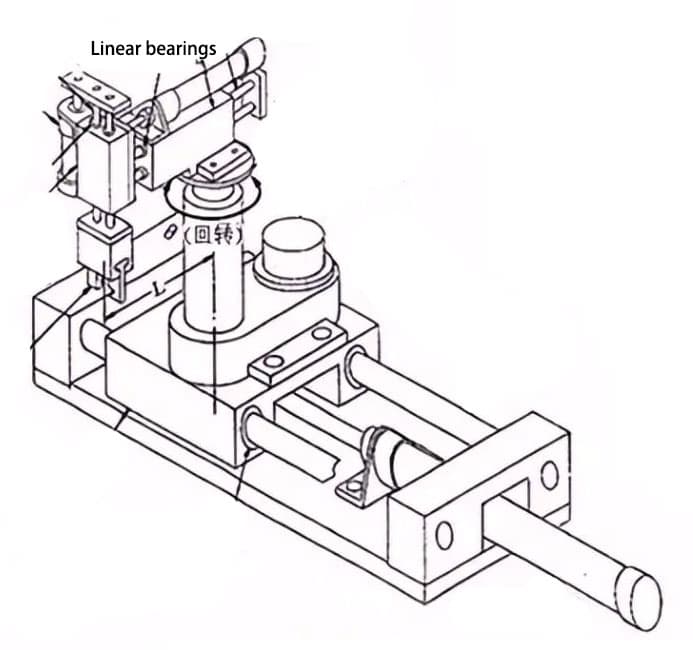
Les paliers linéaires sont divisés en deux types : les paliers à mouvement automatique et les paliers à axe fixe pour la rotation de l'arbre. La figure 2 illustre la construction d'une plate-forme entraînée X-Y-Z-θ avec l'arbre comme axe de guidage. Les roulements sont classés en conséquence.
a) Axe X : Les roulements linéaires sont auto-mobiles et de type à bride.
b) Axe Y : Les roulements linéaires sont fixes (dans la direction de l'axe Θ) et permettent un mouvement dans la direction de l'axe A.
c) Axe Z : Les roulements linéaires sont fixes dans la direction de l'axe Z et permettent un mouvement dans la direction de l'axe Y.
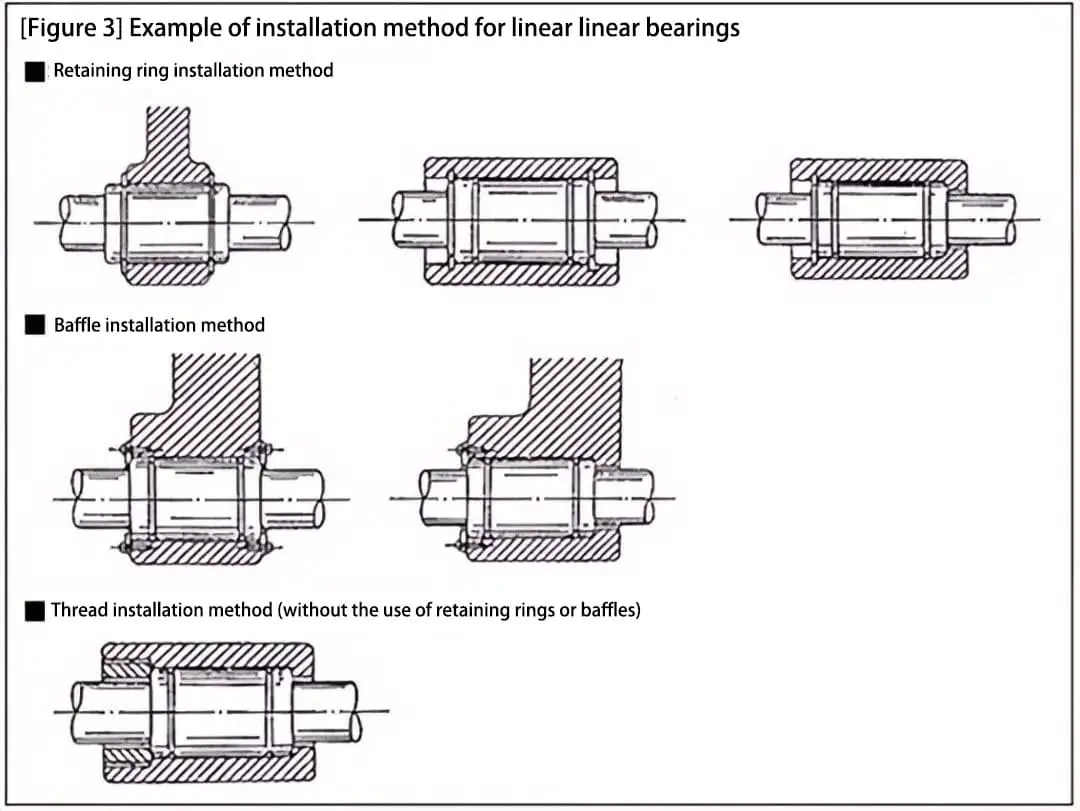
Pour les types linéaires, sélectionner les méthodes de fixation par anneau d'arrêt ou par plaque d'arrêt en fonction de la résistance souhaitée de la fixation.
a) La partie mobile de la section sur l'axe X est soumise à la force d'inertie du poids de la partie mobile supportée par le roulement linéaire. Le roulement linéaire doit être solidement fixé.
b) Le roulement linéaire est fixé au siège du roulement, et en raison de l'utilisation d'un cylindre pour entraîner la structure de l'arbre, la fixation axiale du roulement linéaire ne résiste qu'à la force de réaction du frottement, c'est pourquoi une conception compacte a été adoptée pour le type linéaire. En outre, les roulements linéaires de l'axe Y sont placés dans la direction opposée aux deux axes par rapport à l'axe de rotation de la plate-forme à entraînement θ, ce qui permet une grande rigidité par rapport au couple de rotation.
c) Si l'on considère la direction de l'arbre mobile, c'est la même chose que b) et ne supportera pas de grandes forces.
(3) Méthodes d'installation et précautions pour les roulements linéaires.
(1) Méthodes d'installation des roulements linéaires
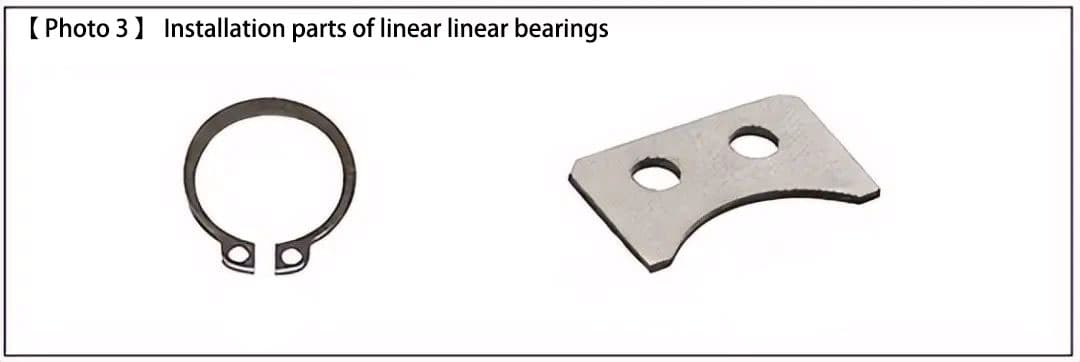
Les roulements linéaires sont généralement installés à l'aide de bagues d'arrêt ou de plaques d'arrêt (voir [Photo 3] et [Figure 3]).
(2) Précautions pour l'angle d'installation des roulements linéaires
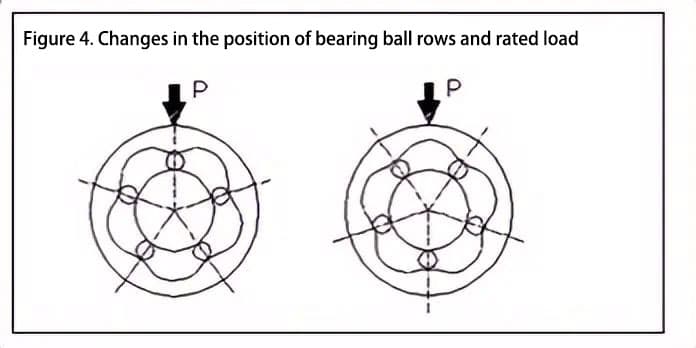
En raison des différences de diamètre et de type d'arbre, ainsi que du nombre de rangées de billes dans le roulement, les roulements linéaires ont généralement 4 à 6 rangées de billes disposées à angles égaux. Lorsque les roulements linéaires sont utilisés horizontalement, il faut éviter de les installer avec les rangées de billes dans la position directement supérieure (comme le montre le côté gauche de la [figure 4]), car cela peut entraîner des charges concentrées.
La [Figure 4] montre un roulement à billes à 5 rangées, et le rapport des valeurs de charge nominale est indiqué ci-dessous (côté droit ÷ côté gauche). Par conséquent, l'installation doit se faire le plus près possible de l'angle d'installation indiqué dans le diagramme ci-dessus.
Charge statique nominale (côté droit ÷ côté gauche) = 1,46
Charge dynamique nominale (côté droit ÷ côté gauche) = 1,19
3. Différenciation des roulements à simple paroi, à double paroi, allongés et traités en surface.
(1) Longueur du palier et performance de guidage
Les roulements linéaires peuvent être divisés en quatre types en fonction de la longueur du roulement :
[1] à simple paroi
[2] doublé
[3] étendu
[4] conçu par le client (à l'aide de deux types à ligne unique).
La différence de longueur des roulements affecte directement la performance du guidage comme suit :
a) Capacité de charge
b) Précision du guidage
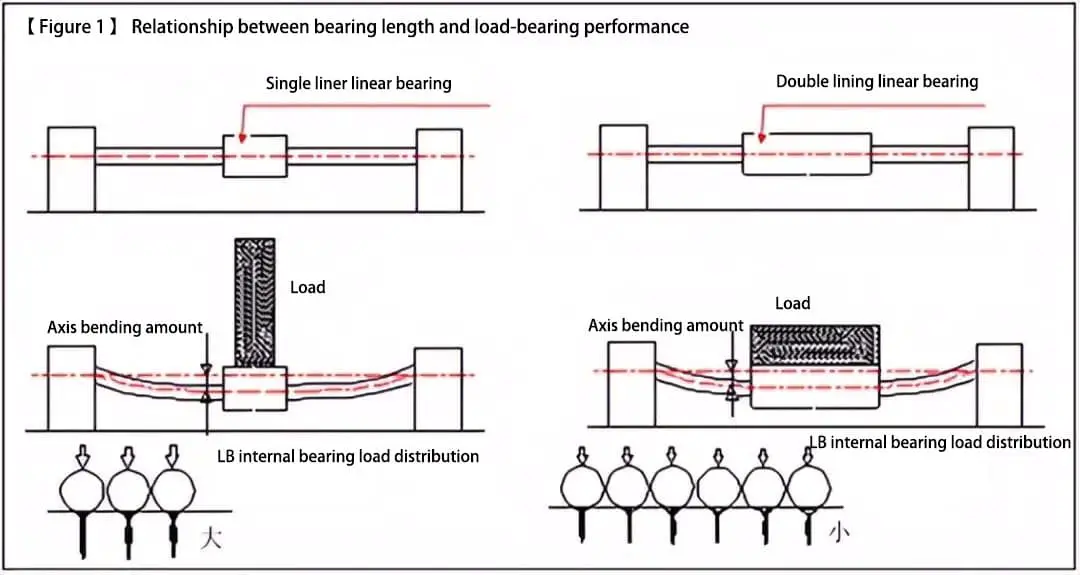
a) Relation entre la longueur du palier et la capacité de charge
Plus le roulement est long, plus il y a de points d'appui et plus la charge requise pour chaque point de contact du roulement est faible. Cette conclusion peut être tirée de la situation réelle où la charge nominale des trois types [1], [2] et [3] de roulements linéaires augmente séquentiellement avec leur longueur.
Par conséquent, le choix d'une plus grande longueur de roulement linéaire peut améliorer la capacité de charge du produit (= augmentation de la durée de vie et de la fiabilité) ([Figure 1]).
b) Relation entre la longueur des roulements et la précision du guidage
Plus la longueur des roulements est importante, plus la précision du guidage est élevée.
1)
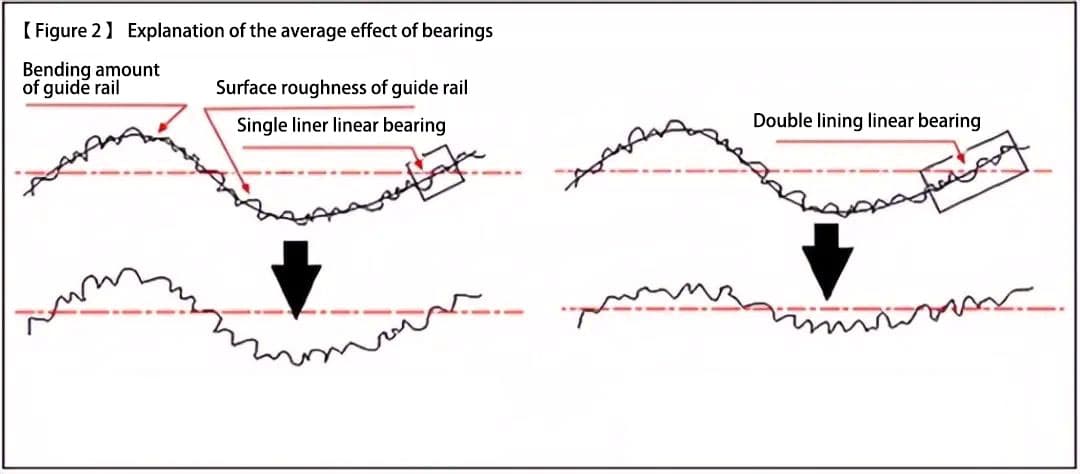
En calculant la moyenne de l'erreur de guidage du rail de guidage (arbre), la précision du produit peut être améliorée (voir la note correspondante pour plus de détails) ([Figure 2]).
2)
La précision du produit peut être améliorée en réduisant l'erreur de jeu entre le rail de guidage (arbre) ([Figure 3]).
L'effet de moyenne des roulements : En augmentant la longueur du palier de guidage linéaire, le nombre de supports de palier augmente et les facteurs d'erreur sur la surface de guidage (rugosité de la surface et déformation par flexion) peuvent être moyennés, l'effet du facteur d'erreur étant supprimé à moins de la moitié.
Par conséquent, l'augmentation de la longueur des roulements permet d'améliorer la capacité de charge et la précision du guidage.
Par conséquent, le type [4] (qui utilise une conception spécifique avec deux types de lignes simples) de roulement linéaire est souvent utilisé dans des environnements de travail de haute précision dans une certaine mesure ([Figure 4]).
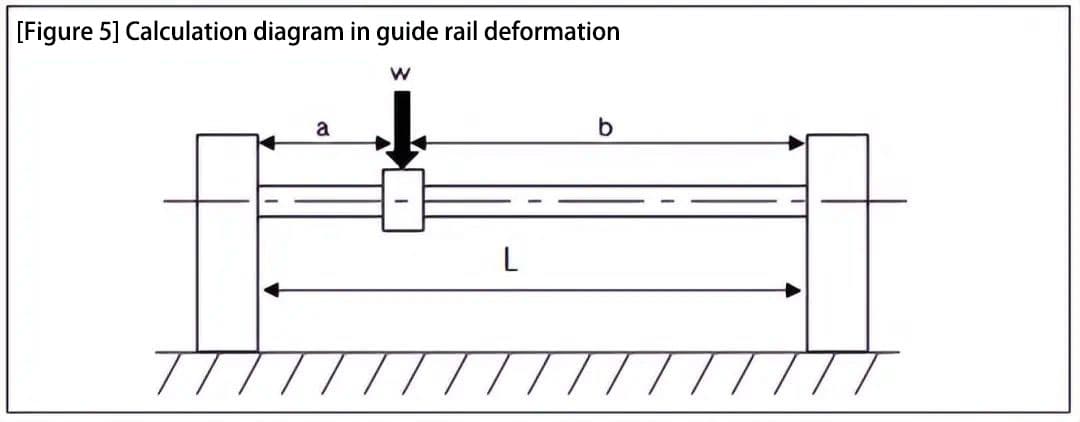
(2) Calcul de la déformation du rail de guidage (arbre) ([Figure 5])
Dans un mécanisme linéaire composé d'un roulement linéaire et d'un arbre, la déformation de l'arbre peut être calculée à l'aide de l'équation suivante :
δ = (W * a3 * b3) / (3 * E * I * L3)
où :
a : Distance entre le point d'appui et la position de la charge
b : Distance entre le point d'appui du côté opposé à a et la position de la charge
L : Distance entre les supports d'arbre
E : Module d'Young
I : Second moment de l'aire de la section transversale
I = πd4/64 ≈ 0.05d4
d : Diamètre de l'arbre
W : Charge supportée par le palier linéaire (unité : N)
Lorsque a = b = L/2, δ = W * L3 / (9,6 * E * d4).
Par conséquent, si vous souhaitez réduire la déformation de l'arbre, vous devez adopter une approche de conception qui augmente le diamètre de l'arbre (4 fois l'effet) ou réduit la distance entre les supports de l'arbre (3 fois l'effet).
(3) Caractéristiques et exemples d'application des matériaux constitutifs et du traitement de surface
Les matériaux constitutifs, traitements de surfaceLe tableau suivant présente des exemples de roulements linéaires et d'applications :
Matériau de l'anneau extérieur
Traitement de surface
Matériau du support
Matériau de la bille
Exemples d'application :
SUJ2
–
Équivalent à la résine/SUS440C
SUJ2
Guide de glissement avec exigence générale de résistance à l'usure.
Mouvement de précision pour les composants optiques sans reflet dans un environnement sans poussière.
SUJ2
Chimique Ni-P
Idem que ci-dessus.
Idem que ci-dessus.
Pièces coulissantes résistantes aux produits chimiques dans un environnement sans poussière nécessitant une résistance à l'usure.
Equivalent à SUS440
–
Idem que ci-dessus.
Idem que ci-dessus.
Charge légère dans un environnement sans poussière et équipement utilisé dans les domaines alimentaire et médical.
Caractéristiques comparatives des traitements de surface.
Matériau de l'anneau extérieur :
Traitement de surface
Caractéristiques :
SUJ2
–
SUJ2 est fabriqué en fer et a tendance à rouiller.
Idem que ci-dessus.
Chrome noir basse température
Faible coefficient de frottement et bonne résistance à l'usureCapable de former un revêtement uniforme et fin de couleur noire qui ne reflète pas la lumière et présente une bonne absorption de la chaleur.
Idem que ci-dessus.
Placage chimique de Ni-P
Excellente résistance aux agents chimiques et à la corrosion, souvent utilisé dans les salles blanchesRevêtement dur avec une finition brillante et non magnétique.
4. Exemple d'application de roulements linéaires sur un équipement automatique simple
Les caractéristiques des roulements linéaires sont décrites ci-dessous :
Roulements de guidage simples et peu coûteux avec des performances moyennes. (Rapport coût-bénéfice élevé)
Faible coefficient de frottement, facilitant la sélection de l'entraînement. (Cylindre à faible coût ou type de moteur à prix moyen)
En le combinant avec un courroie synchroneIl est ainsi possible d'obtenir une conception de conduite silencieuse et légère.
Dans le cas du guidage vertical, l'utilisation de la méthode de conduite au centre de gravité permet une conception simple et compacte de la construction.
L'utilisation et les caractéristiques des roulements linéaires sont expliquées ci-dessous à travers un exemple d'application dans un équipement automatisé simple.
(1) Moteur pas à pas et entraînement par courroie synchrone
La transmission par courroie synchrone présente des avantages tels que le silence, la légèreté, le faible coût et l'absence de besoin d'huile. Pour les tables de travail à axes X/Y/Z, le concept habituel consiste à réduire la charge sur le moteur de l'axe X inférieur en allégeant l'axe Y supérieur.
C'est pourquoi l'axe Y est souvent construit à l'aide d'une courroie synchrone.
a) [La figure 1] montre un mécanisme d'entraînement à trois axes X/Y/Z typique.
L'axe X est constitué de guides linéaires, tandis que les axes Y et Z sont construits à l'aide de roulements linéaires. Le système d'entraînement utilise des courroies synchrones et des vis à billes.
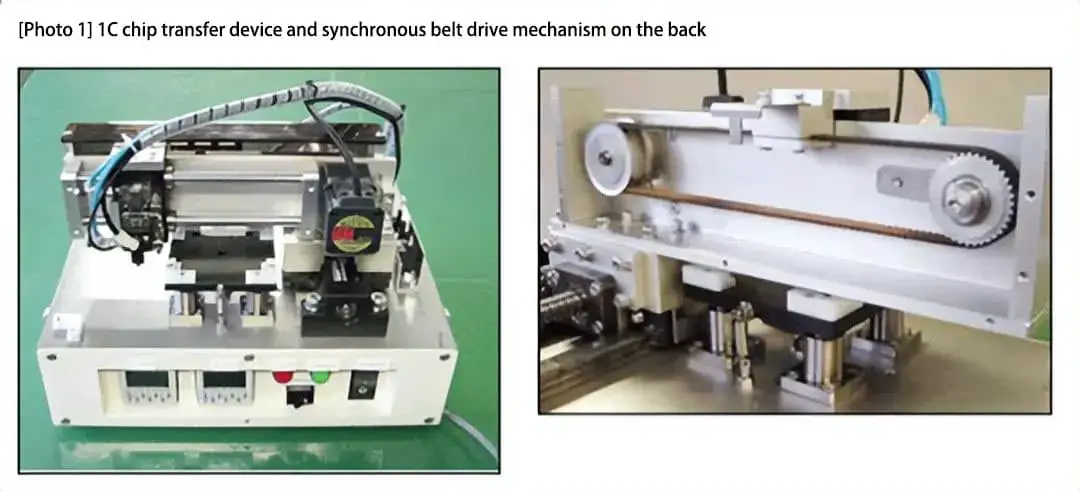
b) [Photo 1] montre un exemple d'application de l'axe Y dans un dispositif de montage de puces électroniques. La direction de l'axe Y est convertie en mouvement alternatif par une courroie synchrone.
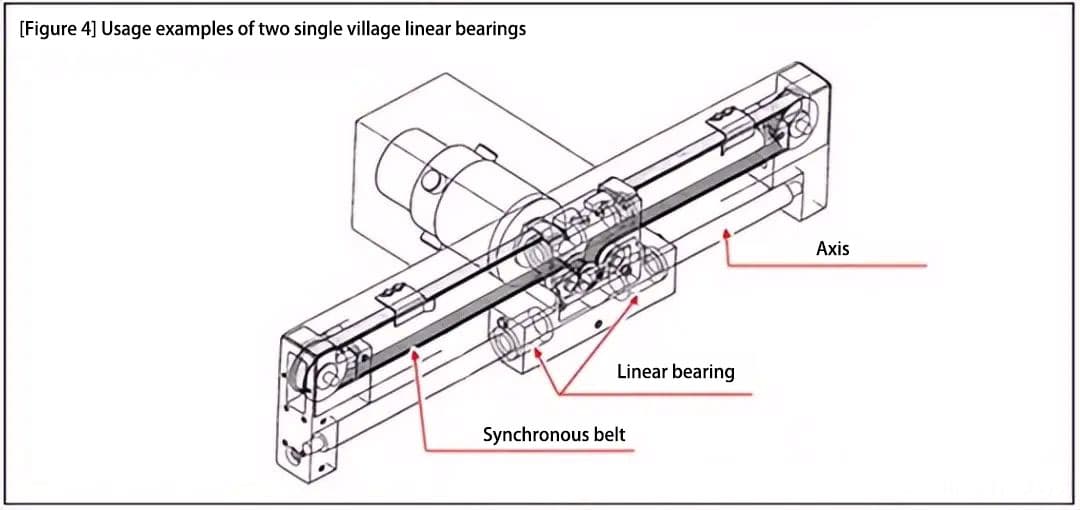
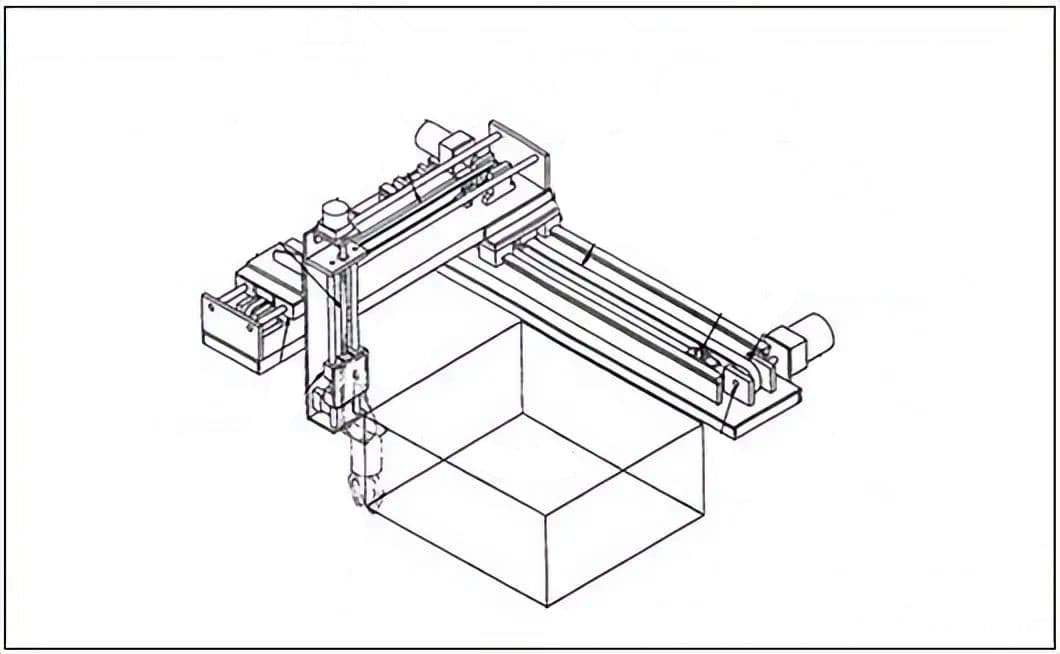
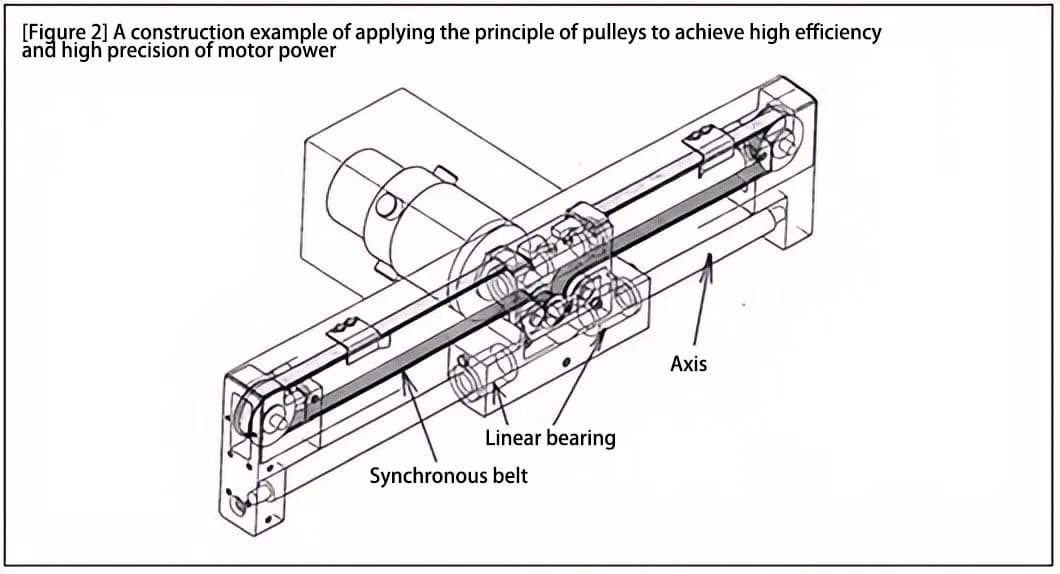
c) [La figure 2] montre un exemple d'application d'un robot à axe unique présentant les caractéristiques suivantes :
Deux roulements linéaires sont utilisés avec une grande portée pour améliorer la capacité de roulement et la précision du guidage.
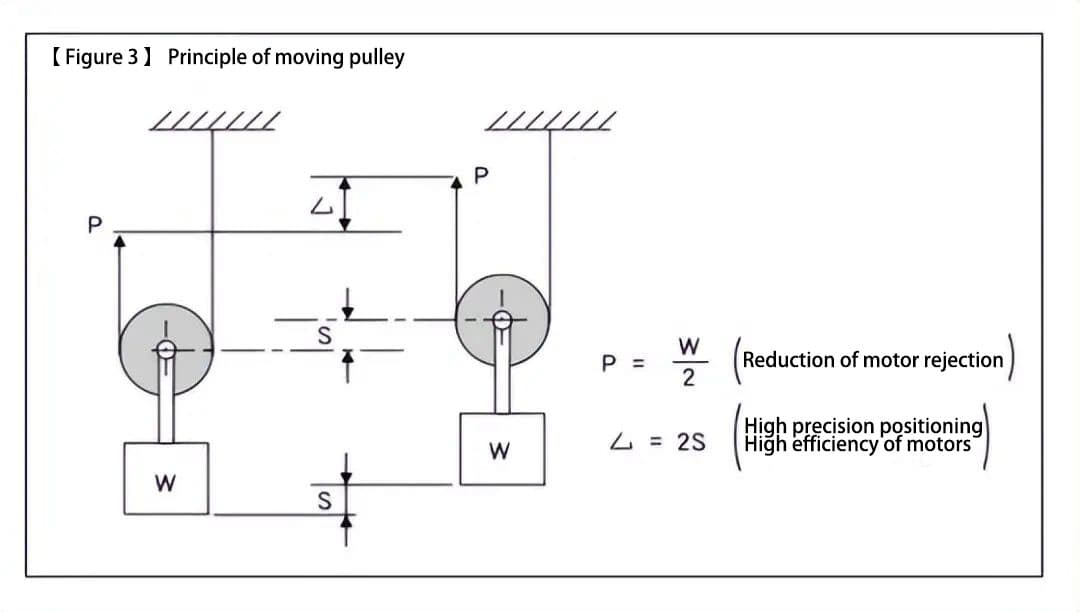
La conception et la structure de la courroie synchrone et de la poulie utilisent un principe de poulie roulante ([Figure 3]) pour obtenir un rendement élevé de la puissance du moteur et un positionnement de haute précision.
La courroie synchrone et l'arbre sont disposés parallèlement de haut en bas, et même avec une structure à axe unique, la rotation relative entre l'arbre et le palier linéaire peut être limitée.
Principe de la poulie mobile :
Pour soulever l'objet de la figure 3 d'une distance S, il faut déplacer le verrou de la corde de deux fois la hauteur, mais la force requise ne représente que la moitié du poids de l'objet de levage, ce qui permet de soulever facilement l'objet de levage.
2 fois la distance de déplacement
Précision de positionnement permettant d'améliorer la résolution minimale de la rotation du moteur Réduire de moitié l'erreur de recul et de ralenti de la poulie Entraînement du moteur à grande vitesse de rotation (2x), ce qui permet d'obtenir un rendement élevé du moteur.
1/2 fois la charge
Il peut être entraîné par un moteur de faible puissance (sans nécessiter de réducteur, etc.).
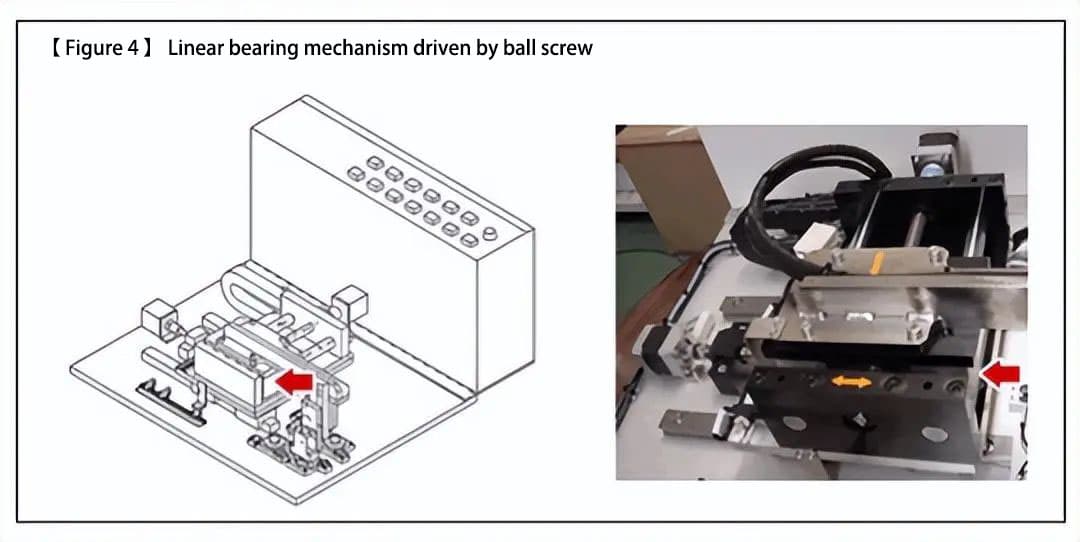
(2) Moteur pas à pas et entraînement par vis à billes
La méthode d'entraînement de la vis à billes présente les caractéristiques suivantes : [1] elle convertit directement le mouvement rotatif du moteur en mouvement linéaire, et [2] le pas de la vis à billes a une fonction de réducteur. L'efficacité de la transmission de la force motrice et l'efficacité du moteur sont relativement élevées.
[Figure 4] est un mécanisme d'entraînement dans lequel l'axe Y utilise un roulement linéaire et une vis à billes. Il est généralement utilisé pour les mécanismes qui nécessitent une avance unitaire ou qui ont des exigences en matière de précision de positionnement.
Informations complémentaires :
a) Caractéristiques d'un moteur pas à pas
Les moteurs pas à pas ont la particularité de produire un couple élevé à faible vitesse (généralement au démarrage et à la décélération), ce qui les rend adaptés aux déplacements sur de courtes distances et à la commande de positionnement multipoints.
b) Précision nécessaire du moteur pour atteindre la précision de positionnement visée
Précision de positionnement cible = ±0,01 (mm). En choisissant un pas de vis à billes de 10 (mm/tour), la précision nécessaire (divisions) du moteur pas à pas peut être calculée à l'aide de la formule suivante.
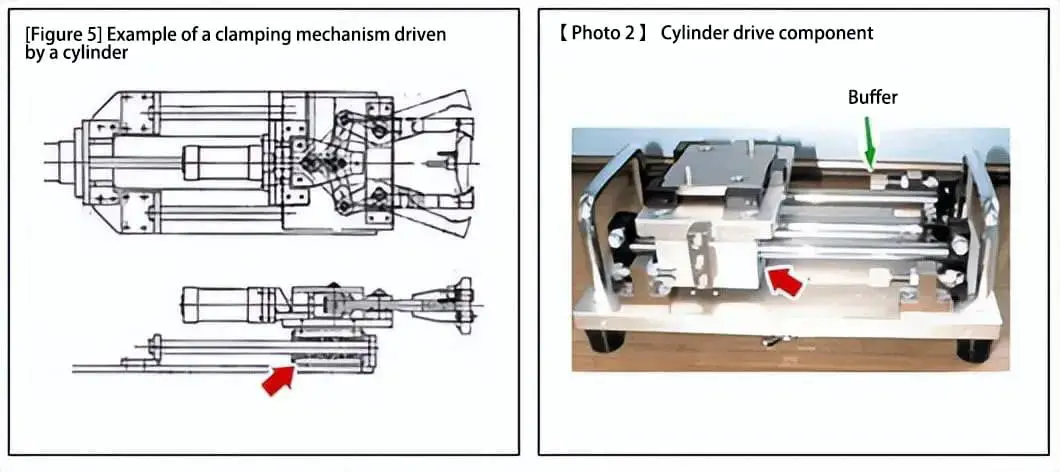
(3) Entraînement des cylindres
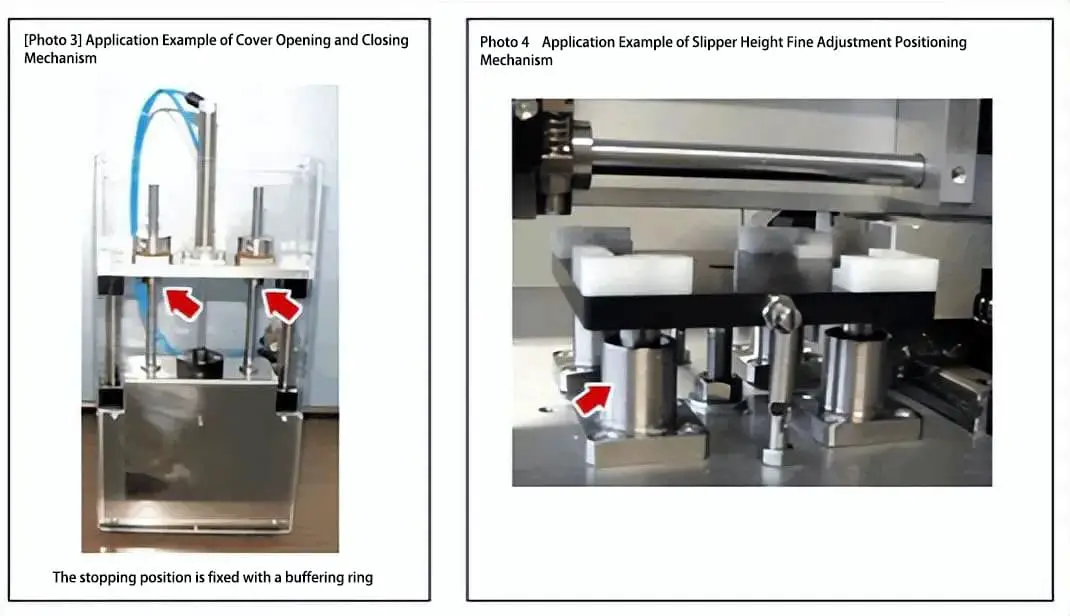
La [Figure 5] est un exemple de roulement utilisé pour l'entraînement d'un cylindre dans un mécanisme de serrage, tandis que la [Photo 2] est un exemple de mécanisme d'entraînement d'un cylindre qui utilise un accouplement magnétique. Les deux utilisent des roulements linéaires (indiqués par les flèches) pour le guidage.
Il n'est pas possible de contrôler la vitesse de démarrage et d'arrêt avec un vérin, il faut donc utiliser un tampon pour réduire l'impact lors de l'arrêt (comme le montre la [Photo 2]).
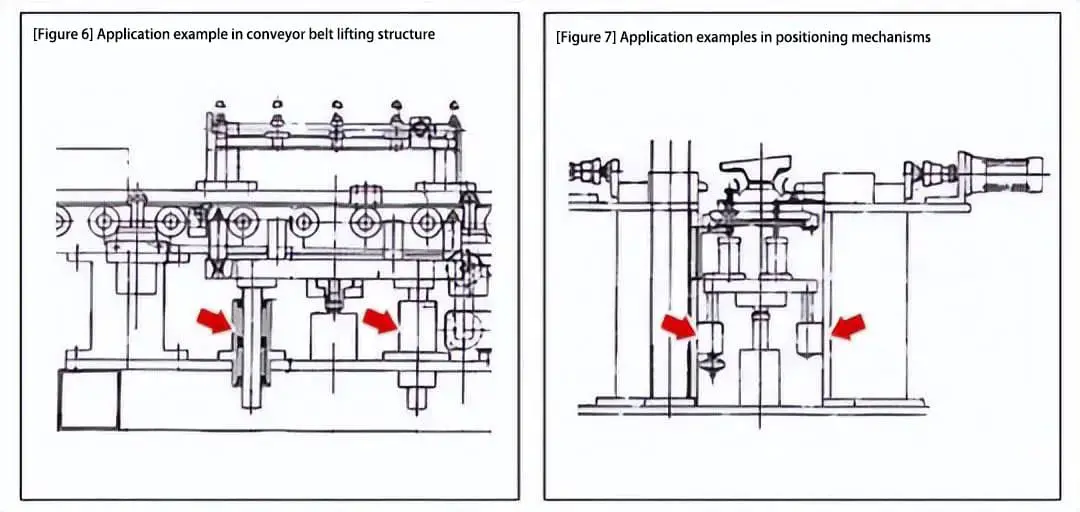
(4) Exemples de guidage vertical
Le guidage vertical peut être réalisé en utilisant des roulements linéaires avec des brides. Une structure de support spécifique n'est pas nécessaire pour sécuriser l'installation des roulements linéaires, ce qui permet une conception structurelle simple et compacte (dans le cas des guidages coulissants, où un support de montage vertical doit être mis en place pour le rail de guidage fixe).
Comme la structure de la [Photo 4], le guide de levage (illustré à la [Figure 6]) et le mécanisme de positionnement (illustré à la [Figure 7]) de la partie inférieure de la bande transporteuse utilisent également des roulements linéaires à collerette.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Imaginez qu'une simple surface en verre vous permette d'accéder à la précision des machines-outils. C'est exactement ce que font les échelles à réseaux linéaires, qui transforment les lignes fines en mesures extrêmement précises. Cet article explore comment ces...
Vous êtes-vous déjà demandé comment les arêtes vives des pièces métalliques sont adoucies ? Ce processus, connu sous le nom de chanfreinage, transforme les angles dangereux et irréguliers en surfaces angulaires plus sûres. Dans cet article, vous...
Vous êtes-vous déjà demandé quelles marques de roulements étaient les meilleures au monde ? Dans cet article de blog, nous allons explorer les principaux fabricants de roulements connus pour leur qualité exceptionnelle, leur...
Vous êtes-vous déjà demandé qui alimente le monde en coulisses ? Dans cet article de blog, nous allons nous plonger dans les principaux fabricants de générateurs qui maintiennent les lumières allumées...
Vous êtes un futur ingénieur en mécanique et vous souhaitez exceller dans votre domaine ? Dans cet article de blog, nous allons explorer les 10 logiciels de conception d'ingénierie mécanique les plus importants qui peuvent...
Vous êtes-vous déjà demandé comment l'intégrité des écrous et des vis soudés de votre voiture était garantie ? Cet article révèle le processus méticuleux des contrôles de qualité et des inspections qui permettent à votre véhicule...
Vous êtes-vous déjà demandé ce qui permet à un moteur électrique de fonctionner sans surchauffe ? Il est essentiel de comprendre les températures de fonctionnement sûres des moteurs pour assurer leur longévité et leurs performances. Dans cet article,...
Vous êtes-vous déjà interrogé sur le monde fascinant du moulage ? Ce processus de fabrication ancien, mais en constante évolution, façonne notre vie quotidienne d'innombrables façons. Dans cet article de blog, nous explorerons les...
Vous êtes-vous déjà demandé comment les engrenages de votre voiture ou de votre avion fonctionnaient si bien ? Cet article dévoile les principaux fabricants d'engrenages qui façonnent l'avenir de l'ingénierie mécanique. Vous apprendrez...
Faites passer votre entreprise à la vitesse supérieure