Notions de base sur les échelles à réseaux linéaires : Tout ce qu'il faut savoir
Imaginez qu'une simple surface en verre vous permette d'accéder à la précision des machines-outils. C'est exactement ce que font les échelles à réseaux linéaires, qui transforment les lignes fines en mesures extrêmement précises. Cet article explore le fonctionnement de ces échelles, de leur structure à leurs applications pratiques. Vous découvrirez comment elles amplifient le déplacement et améliorent la précision dans diverses tâches d'usinage. À la fin, vous comprendrez pourquoi ces outils sont essentiels à la fabrication moderne et comment ils peuvent améliorer la précision et l'efficacité de vos projets.
Structure et principe de fonctionnement du réseau.
1.Structure du réseau
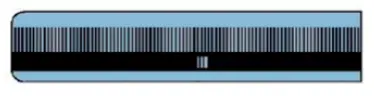
Caillebotis - de nombreuses petites bandes (lignes gravées) de distance égale et de luminosité et d'obscurité alternées sont gravées uniformément sur une surface de verre revêtue.
a - est la largeur des lignes du réseau (non transparent)
b - largeur de l'espace entre les lignes du réseau (transparent)
a+b=W pas du réseau (également appelé constante du réseau)
En général, a=b=W/2, mais il peut aussi être gravé comme a:b=1,1:0,9.
Les grilles couramment utilisées sont gravées de 10, 25, 50, 100 ou 250 lignes par millimètre.
2. Principe de mesure du réseau
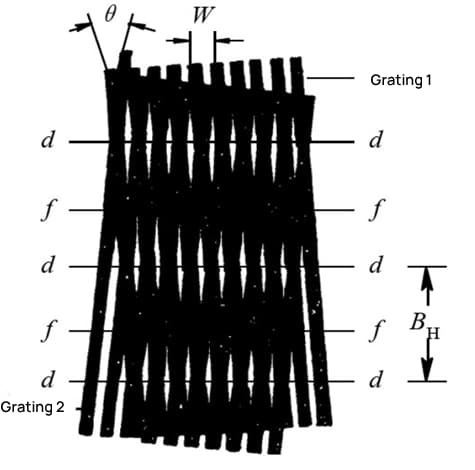
Franges moirées - Lorsque deux réseaux à pas égal (réseau 1 et réseau 2) sont superposés face à face, en laissant un petit espace au milieu, et que le petit angle de réseau θ est formé entre les deux lignes de réseau, des bandes alternativement claires et sombres apparaissent dans la direction proche de la ligne de réseau verticale.
Sur la ligne d-d, les deux lignes de réseau se chevauchent et la zone transparente est la plus grande, formant la bande lumineuse de la bande constituée d'une série de motifs en losange.
Sur la ligne f-f, les deux lignes du réseau sont décalées, ce qui forme la bande sombre de la bande, composée de quelques lignes transversales noires.
La mesure du déplacement des franges moirées présente les trois caractéristiques suivantes :
(1) Effet d'amplification du déplacement
Largeur de bande BH - lorsque le réseau se déplace vers l'avant ou vers l'arrière d'un pas de grille, les franges de moiré se déplacent vers l'avant ou vers l'arrière d'une largeur de bande.
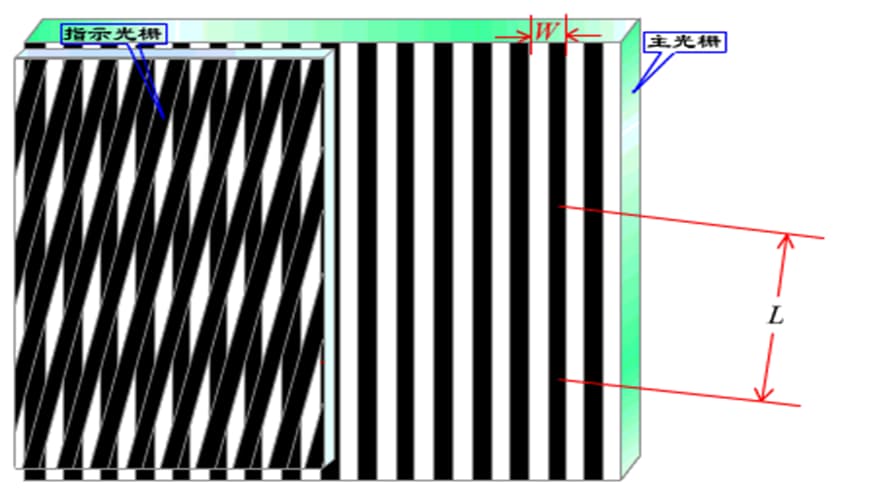
La relation entre BH et θ :
Lorsque θ diminue, BH augmente. Par conséquent, W est amplifié par 1/θ. Par exemple, lorsque θ=0,1°, 1/θ=573, ce qui signifie que BH est 573 fois le pas du réseau W. Cela signifie que le réseau a un effet d'amplification du déplacement, augmentant ainsi la sensibilité de la mesure.
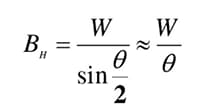
(2) Direction du mouvement de la frange moirée
Lorsque la grille 1 se déplace vers la droite le long de la ligne de coupe dans une direction verticale, les franges de moiré se déplacent vers le haut le long des lignes de grille de la grille 2. En revanche, lorsque le réseau 1 se déplace vers la gauche, les franges de moiré se déplacent vers le bas le long des lignes de la grille 2. Par conséquent, la direction du mouvement du réseau 1 peut être identifiée comme la direction du mouvement des franges de Moiré →.
(3) L'effet moyen de l'erreur
Les franges de Moiré sont formées par le grand nombre de lignes gravées sur un réseau, et elles ont un effet contre-actif sur l'erreur de gravure des lignes. Cet effet peut réduire considérablement l'influence des erreurs à courte période.
Les franges de moiré sont formées par les effets de blocage et de transmission de la lumière entre deux réseaux.
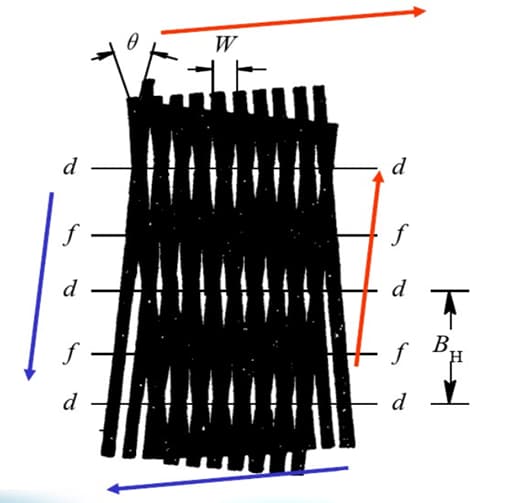
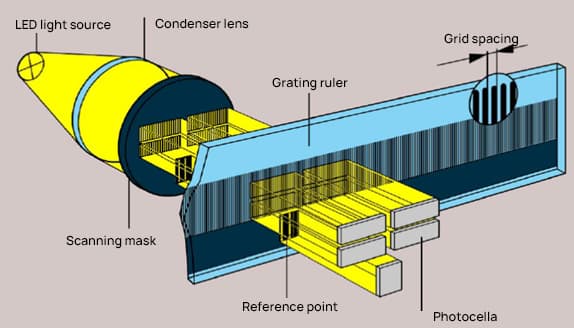
Composition des capteurs à réseau
Tête de lecture de grille : Utilise le principe des réseaux pour convertir la quantité d'entrée (déplacement) en un signal électrique correspondant.
Composants : Réseau de règles, réseau d'indicateurs, système de voies optiques, éléments photoélectriques, etc.
Affichage numérique des grilles : Pour discerner la direction du déplacement, augmenter la précision de la mesure et permettre l'affichage numérique, le signal de sortie de la tête de lecture du réseau doit être converti en un signal numérique.
Composants : Circuit d'amplification de la mise en forme, circuit de subdivision, circuit de discrimination directionnelle et circuit d'affichage numérique, etc.
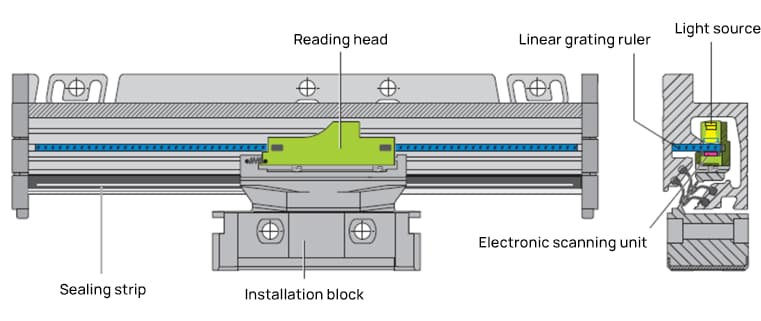
Structure de la règle à grille fermée
La règle à réseau se compose d'un corps de mesure fixe et d'une tête de lecture mobile.
Le corps de la balance fixe est un boîtier en aluminium conçu pour protéger la règle, l'unité de balayage et les rails de guidage à l'intérieur des dommages causés par les copeaux, la poussière ou les éclaboussures d'eau.
La tête de lecture mobile se compose d'une unité de balayage, d'un connecteur de précision et d'un bloc d'installation. Le connecteur de précision relie la tête de lecture au bloc d'installation, qui compense les petites erreurs mécaniques des rails de guidage.
Fonction et avantages de la règle à grille
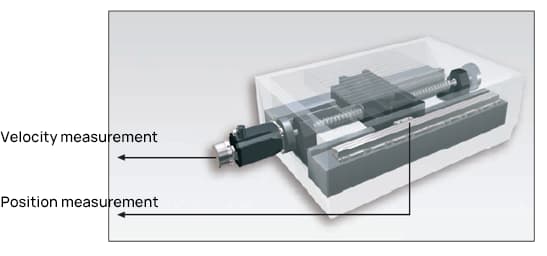
La règle à réseau linéaire est utilisée pour mesurer la position du mouvement de l'axe linéaire. Comme elle mesure directement la position mécanique, elle peut refléter avec précision la position réelle de la machine-outil.
En utilisant la règle à réseau linéaire pour mesurer la position du chariot, la boucle de contrôle de position inclut tous les mécanismes d'alimentation. Il s'agit du mode de contrôle en boucle fermée. L'erreur de mouvement mécanique est détectée par la règle linéaire dans la plaque de glissement et corrigée par le circuit du système de contrôle.
Il peut donc éliminer les erreurs potentielles provenant de sources multiples :
Erreur de positionnement causée par les caractéristiques de température de la vis à billes et des rails de guidage
Erreur d'inversion de la vis à billes
Erreur de la caractéristique de mouvement causée par l'erreur de pas de la vis à billes
Applications des règles à grille
Équipement de traitement : tours, fraiseuses, aléseuses, meuleuses, forage machines, machines d'électroérosion, découpe par fil, centres d'usinage, etc.
Instruments de mesure : projecteurs, instruments de mesure d'images, microscopes à outils, etc.
Il peut également compenser les erreurs de mouvement de l'outil sur les Machine CNC outils
Equipé d'un PLC pour la mesure de déplacement dans divers mécanismes automatisés.
Principe de mesure de la règle à grille
Règle incrémentale pour réseaux
Le principe de mesure de la règle à réseau incrémental consiste à moduler la lumière en franges de Moiré à travers deux réseaux qui se déplacent mutuellement. En comptant et en subdivisant les franges de Moiré, on obtient la variation du déplacement. La position absolue est déterminée en fixant un ou plusieurs points de référence sur le réseau gradué.
Caractéristiques :
La règle à réseau présente des avantages tels qu'une structure simple, une longue durée de vie mécanique, une grande fiabilité, une forte capacité anti-interférence, une longue distance de transmission, une grande précision et un faible coût.
Cependant, les capteurs incrémentaux à réseau présentent également des lacunes. Les règles incrémentales à réseau ne peuvent fournir que la position relative de la rotation de l'arbre.
Le point de référence doit être défini chaque fois que l'alimentation est coupée ou redémarrée, et il y a une erreur de subdivision dans la méthode de traitement du signal.
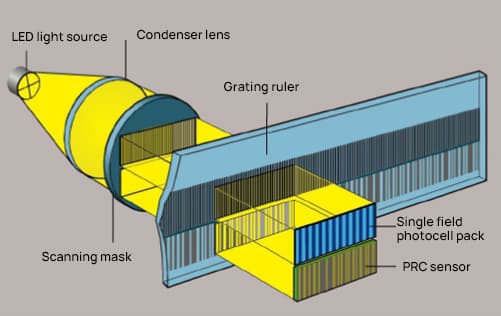
Règle absolue pour les réseaux
Le principe de mesure de la règle absolue à réseau consiste à encoder directement les données de position absolue sous forme de codes sur le réseau en faisant scintiller les lignes du réseau à différentes largeurs et à différents intervalles sur la règle à réseau.
L'équipement électronique suivant peut obtenir des informations sur la position lorsque la règle à réseau est alimentée.
Avantages :
Les informations sur la position actuelle peuvent être obtenues directement après la mise sous tension, sans qu'il soit nécessaire de procéder à une opération de "mise à zéro", ce qui simplifie la conception du système de contrôle. Le calcul de la position absolue est effectué dans la tête de lecture sans qu'il soit nécessaire de recourir à des circuits de subdivision ultérieurs. L'utilisation d'une technologie de communication série bidirectionnelle garantit une communication fiable.
Types de points de référence
La position absolue de la règle du réseau est déterminée à l'aide de marqueurs de référence (positions zéro).
Pour réduire la distance de retour à la position zéro, Heidenhain a conçu des marqueurs de référence à codage de distance à l'intérieur de la longueur de mesure.
La position absolue de la règle du réseau peut être déterminée à chaque passage de deux marqueurs de référence (dont la distance est déterminée par des algorithmes mathématiques).
Les codeurs dont les points de référence sont codés en fonction de la distance portent la lettre "C" après le numéro de modèle (par exemple, LS 487C).
Point de référence unique
Points de référence équidistants.
Point de référence codé en fonction de la distance/C-type.
Cycle du signal
numéro d'incrément nominal
distance maximale de déplacement
LF
4μm
5000
20 mm
LS
20μm
1000
20 mm
LB
40μm
2000
80 mm
Échelle linéaire absolue non référencée
Classification des signaux sur des échelles linéaires
Signal absolu : Endat, Fanuc serial, Siemens, Mitsubishi, Panasonic, etc.
Signal incrémental : Signal sinusoïdal (signal 1 Vpp), signal carré (signal TTL).
Spécifications techniques des balances linéaires
1. Pas du réseau :
L'échelle linéaire émet des signaux électriques et le pas du réseau fait référence aux lignes physiques du réseau sur l'échelle linéaire. Chaque fois que l'échelle linéaire se déplace d'une distance égale au pas du réseau, le signal électrique de sortie change d'un cycle.
Exemple : Lorsque le pas du réseau est de 20um, si l'échelle linéaire se déplace d'une distance de 20um, l'échelle linéaire émettra une onde sinusoïdale avec un déphasage de 360° et une différence de phase de 90°.
2. Cycle du signal :
Avec le développement de la technologie de mesure, il est maintenant possible d'utiliser des circuits de multiplication de fréquence sur la tête de lecture de l'échelle linéaire pour multiplier l'onde sinusoïdale générée par chaque signal de ligne de réseau.
Par conséquent, le cycle de sortie du signal de la balance linéaire peut être affiné. Après avoir été multiplié par la tête de lecture, le signal est beaucoup plus dense que le signal original de la ligne de réseau, et la longueur du signal densifié est appelée le cycle du signal.
Si la tête de lecture n'a pas de capacité de multiplication de fréquence, le pas du réseau est égal au cycle du signal.
3. Multiplication de la fréquence :
La multiplication de la fréquence peut être considérée comme une densification du signal original. La multiplication de la fréquence peut raccourcir la période d'une onde sinusoïdale, raccourcir la distance mesurée correspondant à chaque période et améliorer la précision de la mesure.
Les méthodes courantes de multiplication de la fréquence comprennent : la multiplication de la fréquence par la tête de lecture, les instruments de post-multiplication (fournis par les fabricants de balances linéaires, semblables à des préamplificateurs, utilisés pour l'amplification du signal et la multiplication de la fréquence), la multiplication de la fréquence de Systèmes CNC, etc.
4. Étape de mesure :
Les signaux sinusoïdaux qui ont subi une multiplication de fréquence sont utilisés pour mesurer la position. En raison des limites du processus de fabrication, du niveau d'erreur et de la capacité de traitement du circuit d'enregistrement de la position de la balance linéaire, il est impossible de multiplier à l'infini le signal original de la hauteur du réseau.
C'est pourquoi les fabricants d'échelles linéaires recommandent un pas de mesure pour chaque type d'échelle linéaire. Cette valeur correspond à la distance de mesure minimale que l'échelle linéaire peut tolérer. Dans cette plage de pas de mesure, la précision de mesure nominale de l'échelle linéaire peut être atteinte.
Par rapport aux systèmes CNC, cette étape de mesure est généralement l'unité d'instruction minimale du système. De même, cette spécification technique précise également la précision de mesure (résolution) de l'échelle linéaire.
5. Résolution :
La précision de mesure correspond à la variation de longueur minimale que la balance linéaire peut lire et restituer, par exemple 5um, 1um, 0,5um, 0,1um.
6. Précision de la mesure :
La précision de la mesure fait référence à la précision des données du signal émis par l'échelle linéaire par rapport à la longueur réelle mesurée.
Erreur de position sur l'ensemble de la plage de mesure : Si la valeur maximale de l'erreur de position établie sur la base de la valeur moyenne à l'intérieur d'une plage de mesure de 1 m de long est inférieure à ±a, alors ±a um est le niveau de précision.
Dans les échelles linéaires fermées, cette donnée reflète la précision de l'échelle linéaire, y compris la tête de lecture, c'est-à-dire la précision du système. (Heidenhain : ±0,1, ±0,2, ±0,5, ±1, ±2, ±3, ±5, ±10, ±15um)
Erreur de position à l'intérieur d'un seul cycle de signal :
L'écart de position à l'intérieur d'un seul cycle de signal est déterminé par la qualité du réseau, la qualité du balayage et le cycle de signal de l'échelle linéaire. L'erreur de position à l'intérieur d'un seul cycle de signal est généralement comprise entre ±2% et ±0,5% du cycle de signal.
Plus le cycle de signal est petit, plus l'erreur au sein d'un même cycle de signal est faible. Ceci est très important pour la précision du positionnement pendant le mouvement lent et le mouvement de l'axe et pour le contrôle de la vitesse pendant le mouvement de l'axe, qui détermine la qualité de la surface et la qualité des pièces traitées.
Le cycle du signal de balayage
Erreur d'interpolation maximale à l'intérieur d'un seul cycle de signal
F L
4μm
0,08 μm
LC181
16μm
0,3μm
LC481
20 μm
0,4μm
LS
20 μm
04 μm
LB
40 μm
0,8μm
Facteurs à prendre en compte lors du choix d'une balance linéaire
Lors de la sélection d'une balance linéaire pour des applications de mesure de précision, plusieurs facteurs critiques doivent être soigneusement évalués afin de garantir des performances optimales et une compatibilité avec vos exigences spécifiques :
Longueur de mesure : Déterminez la plage de mesure requise, en tenant compte à la fois de la distance maximale de déplacement et de tout besoin d'extension future.
Interface de signal : Vous avez le choix entre plusieurs options de sortie, notamment
1Vpp (1 volt crête à crête) : Signal analogique adapté aux applications à haute résolution
TTL (logique transistor-transistor) : Sortie numérique à ondes carrées, idéale pour une transmission résistante au bruit
HTL (High-Threshold Logic) : Similaire à TTL mais avec des niveaux de tension plus élevés, convient pour des câbles plus longs.
Échelle linéaire absolue : Fournit des valeurs de position uniques sans besoin de référencement
Pas du réseau : Sélectionnez la période appropriée du réseau en fonction de la résolution et de la précision requises. Les pas plus petits offrent généralement une plus grande précision mais peuvent être limités dans la mesure de la longueur.
Vitesse de mesure : Tenez compte de la vitesse de déplacement maximale de votre application pour vous assurer que la balance peut suivre avec précision les changements de position à la vitesse requise.
Niveau de précision et résolution : Déterminez le niveau de précision requis pour votre application, en tenant compte à la fois de la précision inhérente à la balance et de ses capacités de résolution.
Espace pour la position d'installation : Évaluez l'espace de montage disponible et les conditions environnementales pour choisir une balance aux dimensions et aux indices de protection appropriés.
Méthode d'établissement des points de référence : Choisissez entre des échelles incrémentales avec marques de référence ou des échelles absolues, en fonction de vos besoins en matière de repérage et de référence.
En outre, lors de votre choix final, tenez compte de facteurs tels que la résistance à l'environnement (température, vibrations, contamination), l'interfaçage avec votre système de contrôle et la fiabilité à long terme.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Connaissez-vous les principaux acteurs de l'industrie des pompes centrifuges ? Cet article présente les principaux fabricants qui révolutionnent le marché avec des solutions de pompage innovantes et fiables. De Bosch...
Vous êtes-vous déjà demandé ce qui permet la précision et l'automatisation de la fabrication moderne ? Dans cet article, nous plongerons dans le monde des systèmes CNC, les cerveaux derrière les machines qui...
Dans le monde en constante évolution de l'automatisation industrielle, les servomoteurs sont les héros méconnus de la précision et de l'efficacité. Mais avec les innombrables fabricants qui se disputent l'attention, comment savoir lesquels...
Vous êtes-vous déjà arrêté pour apprécier les héros méconnus qui se cachent derrière vos meubles préférés ? Les plaqueuses de chants, véritables bêtes de somme de l'industrie du bois, jouent un rôle crucial dans la création...
Imaginez qu'un composant critique tombe en panne de manière inattendue, entraînant des conséquences catastrophiques. C'est là que la mécanique des fractures entre en jeu. Cet article explore les bases de la mécanique des fractures, en soulignant comment la compréhension des fissures...
Vous êtes curieux de connaître les leaders de l'industrie des refroidisseurs d'eau ? Cet article explore les principaux fabricants, en mettant en évidence leurs innovations, leur gamme de produits et leur impact sur l'industrie. Du contrôle précis de la température aux solutions écoénergétiques,...
Vous êtes-vous déjà demandé comment les équipements critiques fonctionnant dans des environnements à haute pression maintenaient un fonctionnement fiable ? Les joints d'étanchéité pour gaz secs sont les héros méconnus qui assurent le bon fonctionnement et préviennent les fuites. Dans cet article,...
Vous êtes-vous déjà demandé quelles marques de roulements étaient les meilleures au monde ? Dans cet article de blog, nous allons explorer les principaux fabricants de roulements connus pour leur qualité exceptionnelle, leur...
Imaginez un monde où les machines peuvent voir, sentir et réagir à leur environnement avec une précision inégalée. Telle est la promesse des nouvelles technologies de détection dans le domaine de l'ingénierie mécanique. En intégrant des...
Faites passer votre entreprise à la vitesse supérieure