Exploration des types de moteurs et des principes de fabrication
Imaginez le monde sans le ronronnement des moteurs : pas de voitures, pas d'appareils électroménagers, pas de machines industrielles. Les moteurs convertissent l'énergie électrique en énergie mécanique, alimentant tout, des jouets aux géants de la fabrication. Dans cet article, nous allons explorer les différents types de moteurs, leurs principes de fonctionnement et leurs applications. En comprenant ces principes fondamentaux, vous comprendrez mieux comment ces dispositifs indispensables façonnent notre vie moderne et les innovations qu'ils entraînent dans le paysage industriel.
Près de la moitié de la consommation mondiale d'énergie est attribuée aux moteurs, ce qui fait de l'utilisation efficace des moteurs l'une des mesures les plus efficaces pour résoudre les problèmes énergétiques mondiaux.
Un moteur est un dispositif qui convertit l'énergie électrique en énergie mécanique. Il utilise une bobine alimentée (l'enroulement du stator) pour générer un champ magnétique rotatif, qui agit sur le rotor (tel qu'un cadre fermé en aluminium à cage d'écureuil) pour créer un couple magnétique rotatif.
Les moteurs sont divisés en moteurs à courant continu (CC) et moteurs à courant alternatif (CA) en fonction du type d'alimentation utilisé. La plupart des moteurs du système électrique sont des moteurs à courant alternatif, qui peuvent être synchrones ou asynchrones (la vitesse de rotation du champ magnétique du stator du moteur n'est pas synchronisée avec la vitesse de rotation du rotor).
Un moteur se compose principalement d'un stator et d'un rotor. La direction du mouvement du conducteur alimenté dans le champ magnétique est liée à la direction du courant et à la direction des lignes du champ magnétique. Le principe de fonctionnement d'un moteur est la force du champ magnétique sur le courant, ce qui entraîne la rotation du moteur.
La commande de moteur fait référence au contrôle du démarrage, de l'accélération, du fonctionnement, de la décélération et de l'arrêt du moteur. Les exigences et les objectifs varient en fonction du type de moteur et des circonstances dans lesquelles il est utilisé. Pour les moteurs, la commande du moteur permet d'atteindre les objectifs de démarrage rapide, de réponse rapide, de rendement élevé, de couple élevé et de capacité de surcharge élevée.
Les moteurs standard, servomoteurs, moteurs pas à pas et servomoteurs mentionnés ici se réfèrent à des micromoteurs à courant continu, que nous rencontrons souvent. Un moteur, également appelé "moteur", désigne ce dispositif à induction électromagnétique qui assure la transformation ou la transmission de l'énergie électromagnétique selon la loi de l'induction électromagnétique de Faraday.
Un moteur, également appelé "machine électrique", est représenté dans le circuit électrique par la lettre anglaise "M" (anciennement représentée par "D"). Sa fonction principale est de générer un couple moteur comme source d'énergie pour des appareils électriques ou des machines diverses. Un générateur est représenté par la lettre "G" dans le circuit.
1. Types de moteurs
En général, les moteurs désignent des dispositifs qui convertissent la force générée par le flux de courant électrique dans un champ magnétique en mouvement de rotation et, dans un sens plus large, en mouvement linéaire.
Les moteurs peuvent être classés en deux catégories en fonction de leur source d'alimentation : les moteurs à courant continu et les moteurs à courant alternatif.
On peut également les classer grossièrement en fonction de leurs principes de rotation, à quelques exceptions près pour des types de moteurs particuliers.
(1) Moteur à courant continu
Moteur à balais
Le moteur à balais, très répandu, est généralement appelé moteur à courant continu. Le rotor tourne en commutant le courant à travers des électrodes appelées "balais" (du côté du stator) et un "collecteur" (du côté de l'induit).
Moteur CC sans balais
Ce moteur ne nécessite pas de balais ni de collecteur, mais utilise des fonctions de commutation telles que des transistors pour commuter les courants et faire tourner le moteur.
Moteur pas à pas
Ce moteur fonctionne de manière synchrone avec la puissance d'impulsion et est donc également appelé moteur à impulsions. Il se caractérise par un positionnement facile et précis.
(2) Moteur à courant alternatif
Moteur asynchrone
Le courant alternatif amène le stator à produire un champ magnétique rotatif, qui amène le rotor à produire un courant induit et à tourner sous son interaction.
Moteur synchrone
Le courant alternatif crée un champ magnétique rotatif et le rotor avec le champ magnétique tourne en raison de l'attraction. La vitesse de rotation est synchronisée avec la fréquence du courant.
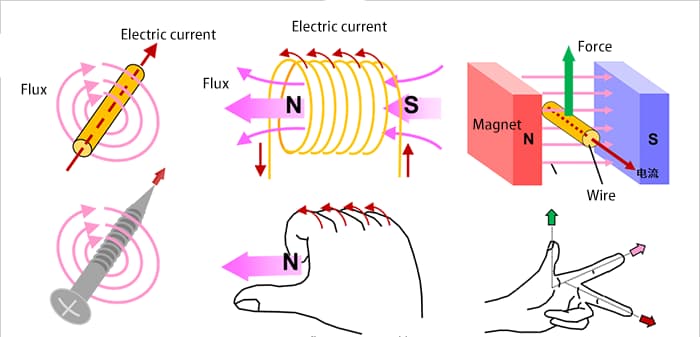
A propos du courant électrique, des champs magnétiques et de la force
Tout d'abord, afin de faciliter l'explication des principes du moteur, rappelons les lois fondamentales du courant électrique, du champ magnétique et de la force. Bien qu'elles puissent susciter un sentiment de nostalgie, il est facile d'oublier ces connaissances si l'on n'utilise pas fréquemment des composants magnétiques.
Nous utiliserons des images et des formules pour illustrer cela.
Schéma de la rotation du moteur
Lorsque la boucle du fil est un rectangle, nous devons tenir compte de la force agissant sur le courant.
La force F agissant sur les côtés a et c peut être calculée par la formule suivante :
Il en résulte un couple autour de l'axe central.
Par exemple, si l'on considère l'état où l'angle de rotation est seulement θ, la force agissant sur b et d à angle droit est sinθ. Par conséquent, le couple Ta sur le côté a peut être exprimé par la formule suivante :
De même, en considérant le côté c, le couple double et génère un couple calculé par la formule suivante :
L'aire du rectangle étant S = h x l, sa substitution dans la formule ci-dessus donne les résultats suivants :
Cette formule s'applique non seulement aux rectangles, mais aussi à d'autres formes courantes telles que les cercles. Les moteurs utilisent ce principe.
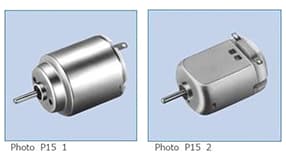
Moteur standard
Un moteur standard, que l'on trouve fréquemment dans des objets courants tels que les jouets électriques et les rasoirs électriques, est généralement un moteur à courant continu à balais. Caractérisé par une vitesse élevée et un faible couple, il ne nécessite que deux broches pour fonctionner. Lorsqu'il est connecté aux bornes positive et négative d'une batterie, le moteur commence à tourner. L'inversion de la connexion fait tourner le moteur dans le sens opposé.
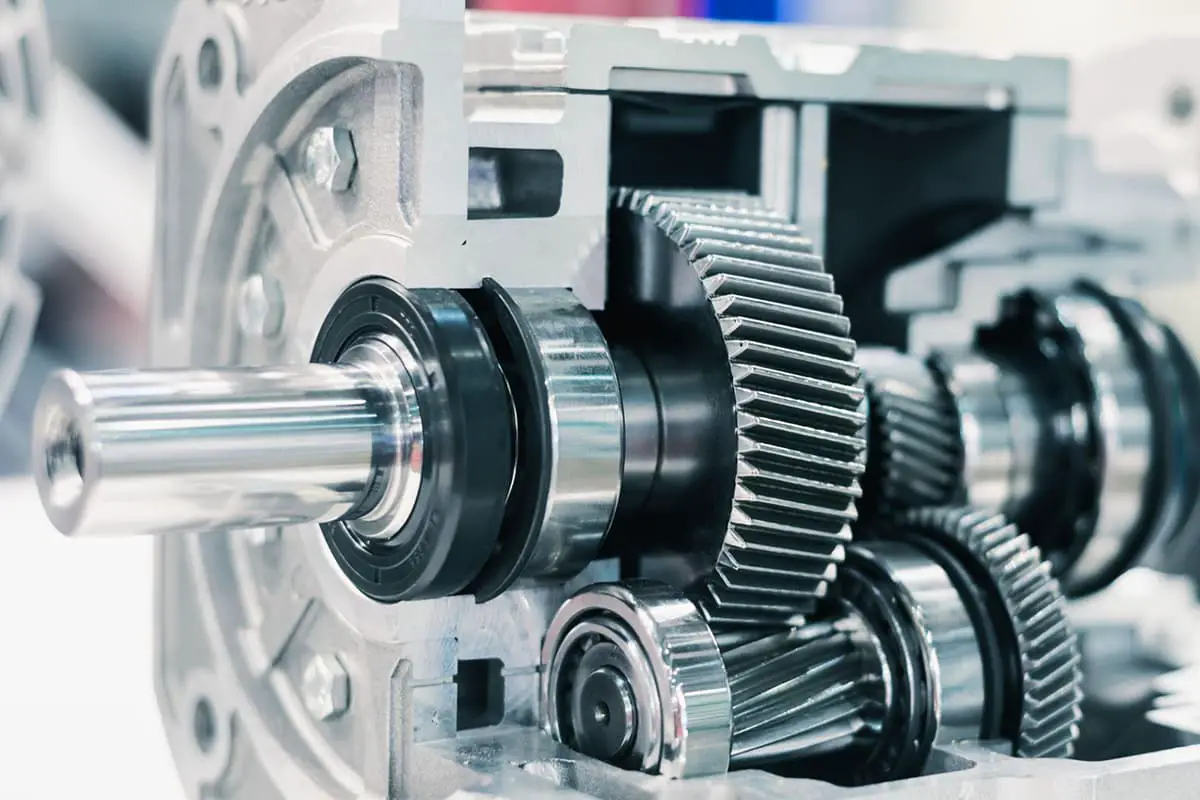
Moteur à réduction d'engrenages
Un moteur à réducteur est un moteur standard équipé d'un réducteur. Cette conception permet de réduire la vitesse de rotation tout en augmentant le couple, ce qui élargit la gamme d'applications pratiques du moteur standard.
Servomoteur
Un servomoteur se compose principalement d'une coque, d'une carte de circuit imprimé, d'un moteur sans noyau, d'engrenages et d'un détecteur de position. Il fonctionne en recevant un signal du récepteur vers le servomoteur. Le circuit intégré intégré détermine le sens de rotation et commande le moteur sans noyau pour qu'il commence à tourner.
Le mouvement est transmis au bras oscillant par l'intermédiaire des réducteurs, et le détecteur de position renvoie simultanément des signaux pour vérifier si la position voulue a été atteinte. Le détecteur de position est essentiellement une résistance variable qui change de valeur de résistance lorsque le servomoteur tourne. La détection de ces valeurs de résistance permet de déterminer l'angle de rotation.
Spécifications fournies par fabricants de servomoteurs Les caractéristiques de l'appareil comprennent généralement les dimensions (mm), le couple (kg/cm), la vitesse (sec/60°), la tension d'essai (V) et le poids (g). L'unité de couple est le kg/cm, qui indique combien de kilogrammes peuvent être soulevés pour une longueur de bras oscillant de 1 cm.
C'est le concept du bras de levier, donc plus le bras est long, plus le couple est faible. L'unité de vitesse est la sec/60°, qui représente le temps nécessaire au servomoteur pour effectuer une rotation de 60°.
Moteur pas à pas
Un moteur pas à pas est un élément de commande en boucle ouverte qui convertit des signaux d'impulsion électrique en déplacement angulaire ou linéaire. En l'absence de surcharge, la vitesse et la position d'arrêt du moteur dépendent uniquement de la fréquence et du nombre de signaux d'impulsion, indépendamment des variations de charge.
Lorsqu'un pilote pas à pas reçoit un signal d'impulsion, il entraîne le moteur pas à pas à tourner d'un angle fixe, appelé "angle de pas", dans une direction prédéterminée. Sa rotation progresse par incréments d'un angle fixe. Le nombre d'impulsions peut être contrôlé pour gérer le déplacement angulaire et obtenir un positionnement précis. De même, la fréquence des impulsions peut être utilisée pour contrôler la vitesse de rotation et l'accélération du moteur, ce qui permet de réguler la vitesse.
Un servomoteur, également appelé moteur actionneur, sert d'unité d'exécution dans les systèmes de commande automatique, convertissant les signaux électriques reçus en un déplacement angulaire ou une vitesse angulaire sur l'arbre du moteur.
Il existe deux catégories principales : les servomoteurs à courant continu (DC) et les servomoteurs à courant alternatif (AC). La caractéristique principale de ces moteurs est qu'il n'y a pas de phénomène d'auto-rotation lorsque la tension du signal est nulle et que la vitesse de rotation diminue uniformément lorsque le couple augmente.
Les servomoteurs s'appuient principalement sur des impulsions pour le positionnement. Pour l'essentiel, le servomoteur tourne d'un angle correspondant à l'impulsion pour chaque impulsion reçue, ce qui permet d'obtenir un déplacement. Comme le servomoteur a lui-même la capacité d'émettre des impulsions, il émet un nombre correspondant d'impulsions pour chaque degré de rotation.
Cela forme un système réactif ou "en boucle fermée" avec les impulsions reçues. Le système sait ainsi combien d'impulsions ont été envoyées au servomoteur et combien d'impulsions ont été reçues en retour. Il peut donc contrôler très précisément la rotation du moteur, ce qui permet un positionnement précis jusqu'à 0,001 mm.
Les servomoteurs sont divisés en deux catégories : les servomoteurs à courant alternatif (AC) et les servomoteurs à courant continu (DC).
Les servomoteurs à courant alternatif sont subdivisés en servomoteurs à courant alternatif asynchrones et en servomoteurs à courant alternatif synchrones.
Les servomoteurs à courant continu sont divisés en deux catégories : les moteurs à balais et les moteurs sans balais. Les moteurs à balais sont peu coûteux, de structure simple, produisent un couple de démarrage élevé, ont une large plage de réglage de la vitesse et sont faciles à contrôler. Ils nécessitent une maintenance, mais celle-ci est peu pratique (par exemple, le remplacement des balais), ils produisent des interférences électromagnétiques et sont soumis à des exigences environnementales spécifiques. Elles conviennent donc aux applications industrielles et civiles générales sensibles aux coûts.
2. Comment les moteurs tournent-ils ?
1)Les moteurs tournent à l'aide d'aimants et de la force magnétique
Autour d'un aimant permanent avec un arbre rotatif,
① Faire tourner l'aimant (pour produire un champ magnétique tournant),
② Selon le principe des pôles opposés qui s'attirent et des mêmes pôles qui se repoussent entre le pôle N et le pôle S,
③ L'aimant avec l'arbre rotatif tourne.
C'est le principe de base de la rotation des moteurs.
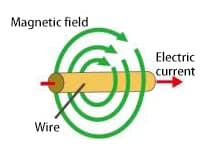
Le passage du courant dans un fil génère un champ magnétique tournant (force magnétique) autour de celui-ci, ce qui fait tourner l'aimant.
En fait, il s'agit du même état opérationnel que celui décrit précédemment.
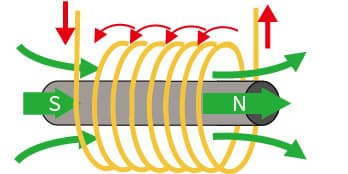
En outre, si le fil est enroulé en bobine, les forces magnétiques sont combinées pour former un flux de champ magnétique important (flux magnétique), ce qui produit des pôles N et S.
L'insertion d'un noyau de fer dans le fil en forme de bobine facilite le passage des lignes de champ magnétique et génère une force magnétique plus importante.
2)Moteurs rotatifs pratiques
Nous présentons ici la méthode pratique d'utilisation du courant alternatif triphasé et des bobines pour produire un champ magnétique rotatif en tant que moteur rotatif.
(Le courant alternatif triphasé est un signal alternatif avec une différence de phase de 120°).
Le champ magnétique combiné dans l'état ① ci-dessus correspond à la figure ① ci-dessous.
Le champ magnétique combiné dans l'état ② ci-dessus correspond à la figure ② ci-dessous.
Le champ magnétique combiné dans l'état ③ ci-dessus correspond à la figure ③ ci-dessous.
Comme indiqué ci-dessus, la bobine enroulée autour du noyau de fer est divisée en trois phases, avec une bobine en phase U, une bobine en phase V et une bobine en phase W disposées à des intervalles de 120°.
La bobine à haute tension génère un pôle N, tandis que la bobine à basse tension génère un pôle S.
Chaque phase change selon une onde sinusoïdale, de sorte que la polarité (pôle N, pôle S) et le champ magnétique (force magnétique) de chaque bobine changent.
À ce moment-là, si nous regardons la bobine qui produit un pôle N, elle passe séquentiellement de la bobine U-phase à la bobine V-phase à la bobine W-phase à la bobine U-phase, provoquant ainsi une rotation.
3. Structure des petits moteurs
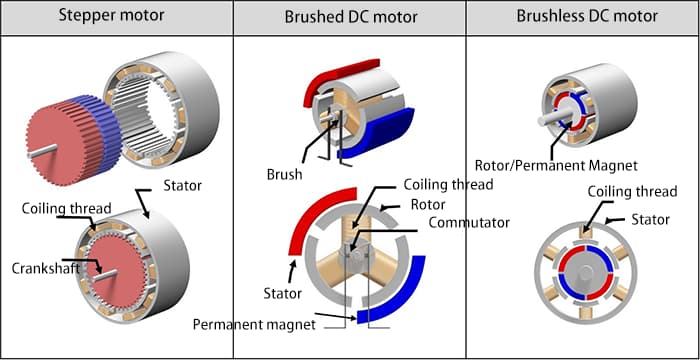
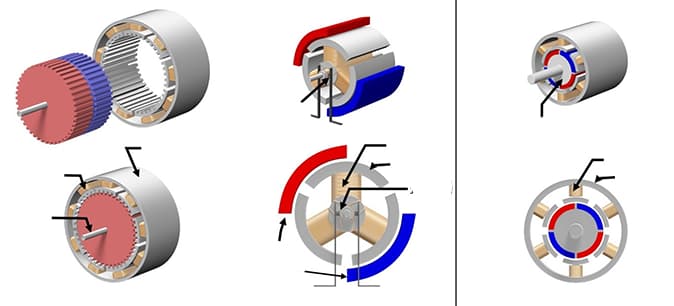
La figure suivante montre les structures approximatives et les comparaisons de trois types de moteurs : le moteur pas à pas, le moteur à courant continu à balais et le moteur à courant continu sans balais.
Les composants de base de ces moteurs sont principalement les bobines, les aimants et les rotors, et ils sont classés en deux catégories : les moteurs à bobine et les moteurs à aimant, en raison de leurs différents types.
Ce qui suit est une explication structurelle liée à l'exemple de diagramme. Comme il peut y avoir d'autres structures si nous les divisons plus finement, veuillez comprendre que cet article décrit la structure globale.
Dans le moteur pas à pas illustré ici, la bobine est fixée à l'extérieur et l'aimant tourne à l'intérieur.
Dans le moteur à courant continu brossé illustré ici, l'aimant est fixé du côté extérieur et la bobine tourne du côté intérieur. Les balais et le collecteur sont chargés d'alimenter la bobine et de modifier le sens du courant.
Dans le moteur sans balais illustré ici, la bobine est fixée à l'extérieur et l'aimant tourne à l'intérieur.
En raison des différents types de moteurs, même si les composants de base sont identiques, la structure peut être différente. L'explication détaillée sera donnée dans chaque section.
4. Moteur à balais
Structure du moteur à balais
Vous trouverez ci-dessous l'apparence d'un moteur à courant continu brossé fréquemment utilisé dans les modèles, ainsi qu'un schéma éclaté d'un moteur typique à deux pôles (2 aimants) et à trois fentes (3 bobines). Nombreux sont ceux qui ont l'habitude de démonter des moteurs et d'en retirer les aimants.
Comme on peut le voir, l'aimant permanent d'un moteur à courant continu brossé est fixe, et les bobines peuvent tourner autour du centre interne du moteur. Le côté fixe est appelé "stator", tandis que le côté rotatif est appelé "rotor".
Le schéma suivant représente le concept de la structure du moteur.
Sur la périphérie de l'axe central rotatif se trouvent trois collecteurs (plaques métalliques incurvées pour la commutation du courant). Pour éviter qu'ils ne se touchent, les collecteurs sont disposés à des intervalles de 120 degrés (360 degrés ÷ 3). Les collecteurs tournent avec la rotation de l'axe.
Chaque collecteur est relié à une extrémité de la bobine et à une autre extrémité de la bobine, et les trois collecteurs et les trois bobines forment un réseau de circuit dans son ensemble (en forme d'anneau).
Deux balais sont fixés à 0° et 180° pour entrer en contact avec les collecteurs. L'alimentation externe en courant continu est connectée aux balais, et le courant circule le long du trajet balai → collecteur → bobine → balai.
Principe de fonctionnement d'un moteur à balais.
① Rotation dans le sens inverse des aiguilles d'une montre à partir de l'état initial
Dans l'état initial, la bobine A est en haut, et l'alimentation est connectée aux balais avec les côtés gauche (+) et droit (-) définis. Un courant important circule du balai gauche vers la bobine A à travers le collecteur, et le côté supérieur (extérieur) de la bobine A devient une structure à pôles S.
Étant donné que la moitié du courant qui traverse la bobine A depuis le pinceau gauche vers les bobines B et C est dans la direction opposée à celle de la bobine A, le côté extérieur des bobines B et C devient un pôle N plus faible (représenté par des lettres plus petites dans le diagramme).
Les champs magnétiques générés dans ces bobines et la répulsion et l'attraction entre les aimants font tourner la bobine dans le sens inverse des aiguilles d'une montre.
② Rotation supplémentaire dans le sens inverse des aiguilles d'une montre
En supposant que la bobine A est dans un état de rotation antihoraire de 30 degrés, le balai droit entre en contact avec deux collecteurs.
Le courant dans la bobine A continue de circuler du balai gauche au balai droit, et le côté extérieur de la bobine A reste un pôle S.
Le même courant que dans la bobine A traverse la bobine B, et le côté extérieur de la bobine B devient un pôle N plus fort.
Comme les deux extrémités de la bobine C sont court-circuitées par les balais, aucun courant ne circule et aucun champ magnétique n'est généré.
Même dans ce cas, la bobine est soumise à une force de rotation dans le sens inverse des aiguilles d'une montre.
De ③ à ④, la bobine supérieure continue à être soumise à une force vers la gauche et la bobine inférieure continue à être soumise à une force vers la droite, continuant à tourner dans le sens inverse des aiguilles d'une montre.
Chaque fois que la bobine tourne de 30 degrés vers les états ③ et ④, le côté extérieur de la bobine devient un pôle S lorsque la bobine est située au-dessus de l'axe horizontal central, et un pôle N lorsque la bobine est située en dessous, effectuant ainsi ce mouvement de manière répétée.
En d'autres termes, la bobine supérieure reçoit à plusieurs reprises une force vers la gauche et la bobine inférieure reçoit à plusieurs reprises une force vers la droite (toutes deux dans le sens inverse des aiguilles d'une montre). Le rotor tourne donc continuellement dans le sens inverse des aiguilles d'une montre.
Si l'alimentation est connectée aux balais gauche (-) et droit (+) opposés, la bobine génère un champ magnétique dans la direction opposée et le sens de la force appliquée à la bobine est inversé, ce qui entraîne une rotation dans le sens des aiguilles d'une montre.
En outre, lorsque l'alimentation électrique est coupée, le rotor du moteur à balais s'arrête de tourner car il n'y a pas de champ magnétique pour le maintenir en rotation.
5. Moteur sans balai triphasé à onde pleine
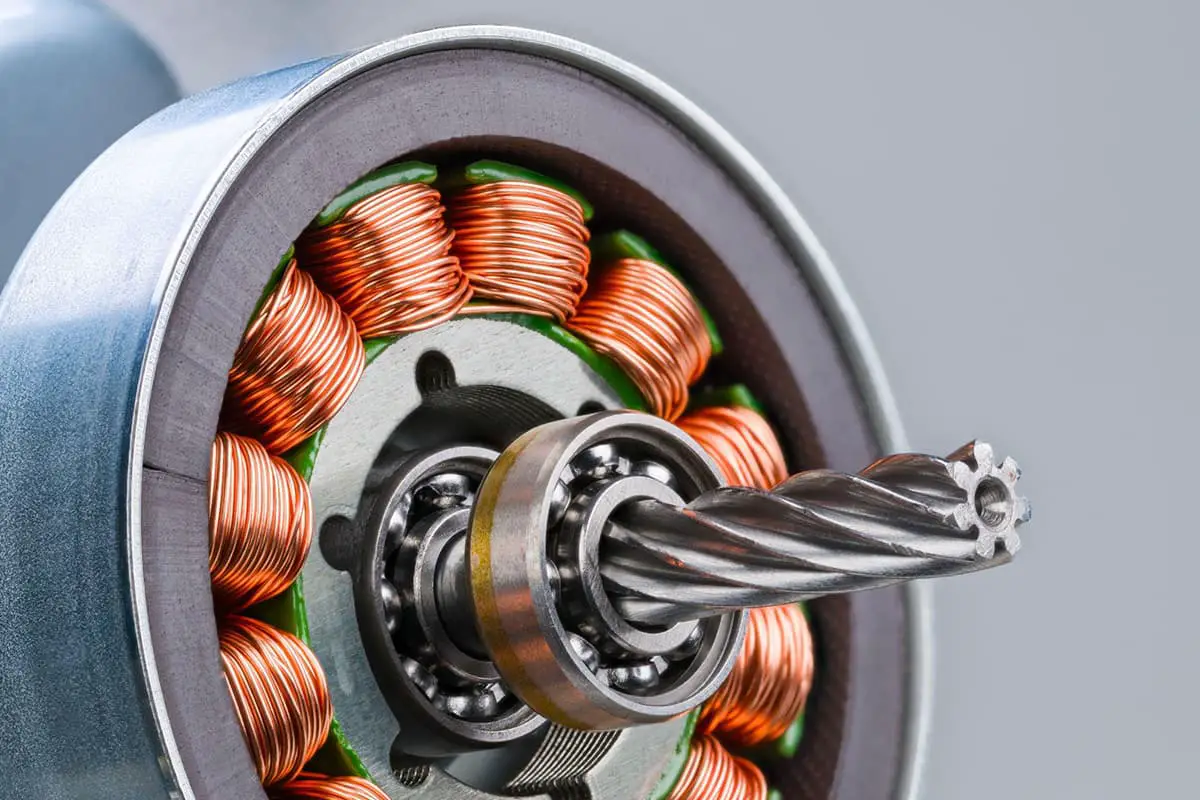
Aspect et structure du moteur sans balai triphasé à onde pleine
La figure suivante montre un exemple de l'aspect et de la structure d'un moteur sans balais.
À gauche, un exemple de moteur à broche pour la rotation des disques dans un appareil de lecture de disques. Il y a au total neuf bobines, composées de trois phases multipliées par trois.
À droite, un exemple de moteur de broche pour un dispositif FDD, qui comporte 12 bobines (trois phases multipliées par quatre). Les bobines sont fixées sur le circuit imprimé et enroulées autour d'un noyau de fer.
Le composant en forme de disque à droite de la bobine est un rotor à aimant permanent. Le bord extérieur est constitué d'un aimant permanent et l'arbre du rotor est inséré au centre de la bobine et en recouvre une partie. L'aimant permanent tourne autour du bord extérieur de la bobine.
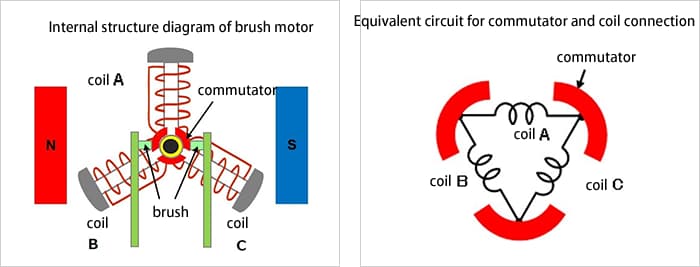
Schéma de la structure interne d'un moteur sans balai triphasé à onde pleine et circuit équivalent pour les connexions des bobines.
Les schémas simplifiés de la structure interne et du circuit équivalent pour les connexions des bobines sont présentés ci-dessous.
Le schéma simplifié montre un moteur à 2 pôles (2 aimants) et 3 fentes (3 bobines) avec une structure simple. Il est similaire à un moteur à balais structure du moteur avec le même nombre de pôles et de fentes, mais le côté bobine est fixe alors que les aimants peuvent tourner. Bien entendu, il n'y a pas de balais.
Dans ce cas, les bobines sont connectées en forme de Y et des composants semi-conducteurs sont utilisés pour alimenter les bobines en courant. Le flux de courant est contrôlé en fonction de la position des aimants en rotation.
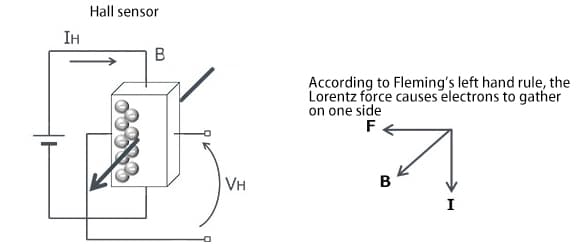
Dans cet exemple, des éléments Hall sont utilisés pour détecter la position des aimants. Les éléments Hall sont placés entre les bobines et détectent la tension générée par l'intensité du champ magnétique, qui est utilisée comme information sur la position. Sur l'image du moteur de broche du dispositif FDD présentée plus haut, on peut également voir des éléments Hall entre les bobines pour la détection de la position (au-dessus des bobines).
Les éléments Hall sont des capteurs magnétiques bien connus qui convertissent la taille du champ magnétique en taille de tension et représentent la direction du champ magnétique par une tension positive ou négative.
Le schéma suivant illustre l'effet Hall.
L'élément Hall utilise le phénomène suivant : "lorsqu'un courant IH traverse un semi-conducteur et qu'un flux magnétique B passe perpendiculairement au courant, une tension VH est générée dans la direction perpendiculaire au courant et au champ magnétique". Le physicien américain Edwin Herbert Hall a découvert ce phénomène et l'a appelé "effet Hall". La tension VH générée s'exprime par la formule suivante :
VH = (KH / d)・IH・B
※KH : coefficient de Hall, d : épaisseur de la surface de pénétration du flux magnétique
Comme le montre la formule, plus le courant est élevé, plus la tension est élevée. Cette caractéristique est couramment utilisée pour détecter la position du rotor (aimant).
Principe de rotation des moteurs sans balais triphasés à onde pleine
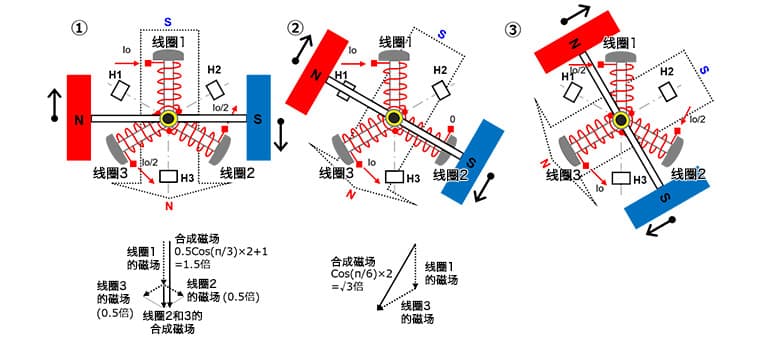
Le principe de rotation d'un moteur sans balais va maintenant être expliqué dans les étapes 1 à 6. Pour faciliter la compréhension, l'aimant permanent a été simplifié, passant d'une forme circulaire à une forme rectangulaire.
① Dans un système de bobines triphasées, la bobine 1 est fixée à la position 12 heures, la bobine 2 est fixée à la position 4 heures et la bobine 3 est fixée à la position 8 heures sur le cadran de l'horloge. Un aimant permanent bipolaire dont le pôle N est à gauche et le pôle S à droite est capable de tourner.
Faire passer un courant Io dans la bobine 1 pour produire un champ magnétique de pôle S à l'extérieur de la bobine. Faites passer un courant de Io/2 dans les bobines 2 et 3 pour produire un champ magnétique de pôle N à l'extérieur de la bobine.
Lorsque les champs magnétiques des bobines 2 et 3 sont combinés vectoriellement, un champ magnétique de pôle N orienté vers le bas est produit. Ce champ magnétique est 0,5 fois supérieur au champ magnétique produit par le courant Io traversant une seule bobine et, ajouté au champ magnétique de la bobine 1, il devient 1,5 fois plus puissant. Il en résulte un champ magnétique combiné perpendiculaire à l'aimant permanent, qui génère un couple maximal et fait tourner l'aimant permanent dans le sens des aiguilles d'une montre.
Lorsque le courant dans la bobine 2 est réduit et que le courant dans la bobine 3 est augmenté en fonction de la position de rotation, le champ magnétique combiné tourne également dans le sens des aiguilles d'une montre, ce qui permet à l'aimant permanent de continuer à tourner.
② Dans un état de rotation de 30 degrés, un courant Io passe dans la bobine 1, rendant le courant dans la bobine 2 nul et faisant sortir le courant Io de la bobine 3.
L'extérieur de la bobine 1 devient un pôle S et l'extérieur de la bobine 3 devient un pôle N. Lorsqu'il est combiné vectoriellement, le champ magnétique produit est √3 (≈1,72) fois plus fort que le champ magnétique produit par le courant Io passant dans une seule bobine. Cela produit également un champ magnétique combiné perpendiculaire à l'aimant permanent, qui tourne dans le sens des aiguilles d'une montre.
Lorsque la position de rotation change, le courant entrant dans la bobine 1 est réduit, le courant entrant dans la bobine 2 part de zéro et augmente, et le courant sortant de la bobine 3 augmente jusqu'à Io. Par conséquent, le champ magnétique combiné tourne également dans le sens des aiguilles d'une montre, ce qui permet à l'aimant permanent de continuer à tourner.
※ En supposant que chaque phase du courant est une onde sinusoïdale, la valeur du courant est ici Io × sin(π⁄3) = Io × √3⁄2. Grâce à la combinaison vectorielle des champs magnétiques, l'amplitude du champ magnétique total est 1,5 fois supérieure au champ magnétique produit par une seule bobine.
Lorsque chaque phase du courant est une onde sinusoïdale, quelle que soit la position de l'aimant permanent, l'amplitude du champ magnétique combiné vectoriellement est toujours 1,5 fois le champ magnétique produit par une seule bobine, et le champ magnétique est perpendiculaire au champ magnétique de l'aimant permanent à un angle de 90 degrés.
③ Lors d'une rotation continue de 30 degrés, un courant de Io/2 traverse la bobine 1, un courant de Io/2 traverse la bobine 2 et un courant de Io sort de la bobine 3.
L'extérieur de la bobine 1 devient un pôle S, l'extérieur de la bobine 2 devient également un pôle S et l'extérieur de la bobine 3 devient un pôle N. Lorsqu'il est combiné vectoriellement, le champ magnétique produit est 1,5 fois le champ magnétique produit lorsqu'un courant de Io passe dans une seule bobine (comme à l'étape 1). Cela produit également un champ magnétique combiné perpendiculaire au champ magnétique de l'aimant permanent à un angle de 90 degrés et tourne dans le sens des aiguilles d'une montre.
④-⑥
Poursuivre la rotation de la même manière qu'aux étapes 1 à 3.
Ainsi, si le courant circulant dans les bobines est continuellement commuté en fonction de la position de l'aimant permanent, ce dernier tournera dans un sens fixe. De même, si le courant circule dans la direction opposée et que le sens du champ magnétique combiné est inversé, la rotation se fera dans le sens inverse des aiguilles d'une montre.
Le diagramme suivant montre le courant circulant dans chaque bobine pour chaque étape de 1 à 6.
L'explication ci-dessus permet de comprendre la relation entre les changements actuels et la rotation.
6. Moteur pas à pas
Un moteur pas à pas est un type de moteur qui peut être contrôlé avec précision en termes d'angle de rotation et de vitesse en se synchronisant avec un signal d'impulsion. Les moteurs pas à pas sont également connus sous le nom de "moteurs à impulsions".
En raison de leur capacité à réaliser un positionnement précis sans utiliser de capteurs de position et uniquement avec un contrôle en boucle ouverte, les moteurs pas à pas sont largement utilisés dans les équipements qui nécessitent un positionnement.
Structure d'un moteur pas à pas (bipolaire biphasé)
Les images suivantes, de gauche à droite, montrent des exemples de l'apparence d'un moteur pas à pas, un schéma de sa structure interne et un diagramme conceptuel de sa structure.
Dans l'exemple de l'illustration, les types HB (hybride) et PM (aimant permanent) de moteurs pas à pas sont représentés. Le schéma du milieu montre également la structure des types HB et PM.
Un moteur pas à pas a une structure dans laquelle les bobines sont fixes et l'aimant permanent tourne. Le schéma conceptuel de la structure interne du moteur pas à pas à droite est un exemple de moteur PM avec des bobines biphasées (deux jeux).
Dans l'exemple de la structure de base du moteur pas à pas, les bobines sont disposées à l'extérieur et l'aimant permanent à l'intérieur. Outre le type à deux phases, il existe des types à plusieurs phases, tels que le triphasé et le quinquennal.
Certains moteurs pas à pas ont des structures différentes, mais pour expliquer le principe de fonctionnement de base des moteurs pas à pas, cet article présente le moteur pas à pas avec la structure de base des bobines fixes et des aimants permanents rotatifs.
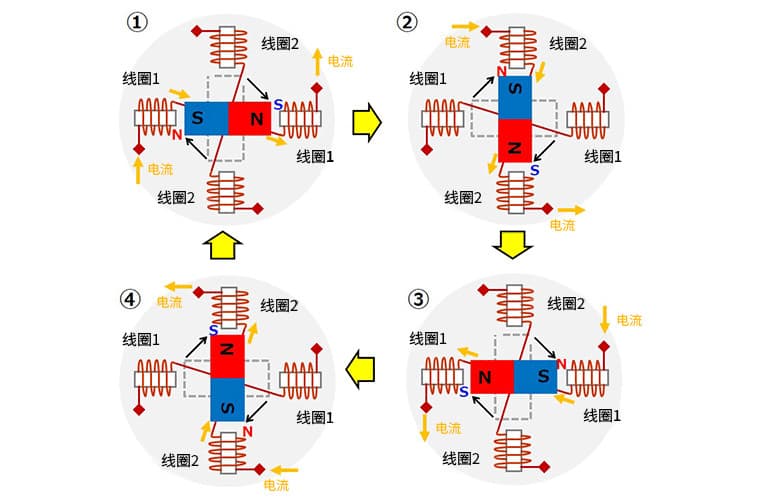
Le diagramme suivant est utilisé pour expliquer le principe de fonctionnement de base du moteur pas à pas. Il s'agit d'un exemple d'excitation de chaque phase (un jeu de bobines) des bobines bipolaires à deux phases illustrées dans l'image précédente, en supposant un changement d'état de ① à ④. Les bobines sont composées des bobines 1 et 2, et la flèche de courant indique la direction du flux de courant.
①
Le courant électrique circule du côté gauche de la bobine 1 et sort du côté droit.
Ne pas laisser le courant électrique circuler dans la bobine 2.
À ce stade, l'intérieur de la bobine gauche 1 devient le Nord, et l'intérieur de la bobine droite 1 devient le Sud.
En conséquence, l'aimant permanent du milieu est attiré par le champ magnétique de la bobine 1 et s'arrête dans un état où le côté gauche est au sud et le côté droit au nord.
②
Arrêtez le courant dans la bobine 1 et laissez le courant circuler par le haut de la bobine 2 et sortir par le bas.
L'intérieur de la bobine supérieure 2 devient le Nord, et l'intérieur de la bobine inférieure 2 devient le Sud.
L'aimant permanent est attiré par son champ magnétique et tourne de 90° dans le sens des aiguilles d'une montre avant de s'arrêter.
③
Arrêtez le courant dans la bobine 2 et laissez le courant circuler du côté droit de la bobine 1 et sortir du côté gauche.
L'intérieur de la bobine gauche 1 devient le Sud, et l'intérieur de la bobine droite 1 devient le Nord.
L'aimant permanent est attiré par son champ magnétique et effectue une nouvelle rotation de 90° dans le sens des aiguilles d'une montre avant de s'arrêter.
④
Arrêtez le courant dans la bobine 1 et laissez le courant circuler de la partie inférieure de la bobine 2 et sortir par la partie supérieure.
L'intérieur de la bobine supérieure 2 devient le Sud, et l'intérieur de la bobine inférieure 2 devient le Nord.
L'aimant permanent est attiré par son champ magnétique et effectue une nouvelle rotation de 90° dans le sens des aiguilles d'une montre avant de s'arrêter.
En commutant le courant circulant dans les bobines dans l'ordre des étapes ① à ④ à l'aide de circuits électroniques, le moteur pas à pas peut être mis en rotation. Dans cet exemple, chaque commutation fait tourner le moteur pas à pas de 90°.
En outre, en faisant circuler continuellement le courant dans une bobine particulière, le moteur pas à pas peut maintenir sa position arrêtée et avoir un couple de maintien. Il convient de mentionner que l'inversion de l'ordre du courant circulant dans les bobines peut faire tourner le moteur pas à pas dans la direction opposée.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Vous êtes-vous déjà demandé ce qui permet à un moteur électrique de fonctionner sans surchauffe ? Il est essentiel de comprendre les températures de fonctionnement sûres des moteurs pour assurer leur longévité et leurs performances. Dans cet article,...
Dans le monde en constante évolution de l'automatisation industrielle, les servomoteurs sont les héros méconnus de la précision et de l'efficacité. Mais avec les innombrables fabricants qui se disputent l'attention, comment savoir lesquels...
Vous êtes-vous déjà demandé comment les excavateurs et autres machines lourdes accomplissent leurs tâches puissantes ? Dans cet article, nous allons explorer les différences fascinantes entre les pompes et les moteurs hydrauliques. Vous apprendrez comment...
Vous êtes-vous déjà demandé comment les machines réalisent des mouvements précis ? Ce blog plonge dans le monde fascinant des modes de contrôle des servomoteurs. De la commande par impulsion à la commande analogique, nous explorerons le fonctionnement de chaque méthode...
Vous êtes-vous déjà demandé comment les trains pouvaient flotter au-dessus des rails ou comment les robots pouvaient effectuer des mouvements précis ? Cet article dévoile le monde fascinant des moteurs linéaires, en expliquant leurs principes, leurs types et leurs avantages uniques. ....
Vous êtes-vous déjà demandé comment choisir le moteur idéal pour votre projet ? La clé réside dans la compréhension des types de moteurs - à courant continu, asynchrones et synchrones - et de leurs avantages uniques. Cet article présente...
Pourquoi les roulements de moteur chauffent-ils autant et que peut-on faire pour y remédier ? Cet article examine les causes de l'échauffement des roulements de moteur, des charges excessives et des...
Que se passe-t-il lorsque l'équilibre magnétique d'un moteur est rompu ? L'attraction magnétique unilatérale est due à un déséquilibre de l'entrefer dans les moteurs, ce qui entraîne des forces inégales qui sollicitent les roulements du moteur. Cet article...
Quel est l'impact des roulements sur l'efficacité et la durabilité des moteurs à engrenages hélicoïdaux ? Cet article se penche sur le rôle critique des roulements, en discutant de leur sélection et de leur disposition, et de la façon dont ils gèrent...
Faites passer votre entreprise à la vitesse supérieure