Premier cas
Compte tenu de ce qui précède :
- Masse du disque M=50 kg
- Diamètre du disque D=500 mm
- Vitesse maximale du disque 60 tr/min
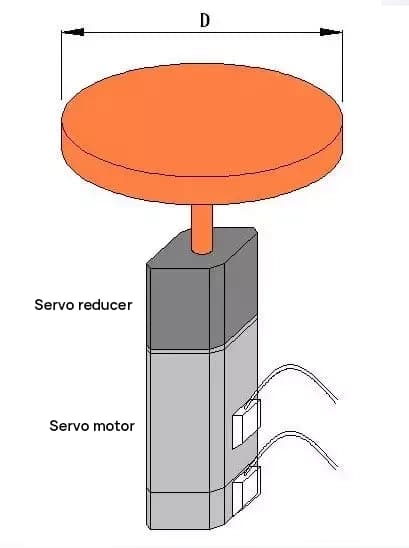
Veuillez sélectionner le servomoteur et le réducteur, le schéma des composants est le suivant :
Calcul du moment d'inertie pour la rotation du disque
JL = MD2/8 = 50 * 502 / 8 = 15625 [kg-cm2]
En supposant un rapport de réduction de 1:R, l'inertie de la charge réfléchie sur l'arbre du servomoteur est de 15625/R2.
Selon le principe que l'inertie de la charge doit être inférieure à trois fois l'inertie du rotor JM du moteur,
si l'on choisit un moteur de 400W, JM = 0,277 [kg-cm2],
puis : 15625 / R2 < 3*0.277, R2 > 18803, R > 137,
la vitesse de sortie = 3000/137 = 22 [tr/min],
ce qui ne répond pas à l'exigence.
Si l'on choisit un moteur de 500W, JM = 8,17 [kg-cm2],
puis : 15625 / R2 < 3*8.17, R2 > 637, R > 25,
la vitesse de sortie = 2000/25 = 80 [tr/min],
qui satisfait à cette exigence.
Ce type de transmission ayant une résistance minimale, les calculs de couple sont ignorés.
Deuxième cas
Compte tenu de ce qui précède :
- Poids de la charge M = 50 kg
- Courroie synchrone diamètre de la roue D = 120 mm
- Taux de réduction R1 = 10, R2 = 2
- Coefficient de frottement entre la charge et la table de la machine µ = 0,6
- Vitesse de déplacement maximale de la charge : 30 m/min
- Temps d'accélération de la charge du repos à la vitesse maximale : 200 ms
Sans tenir compte du poids de chaque roue du convoyeur,
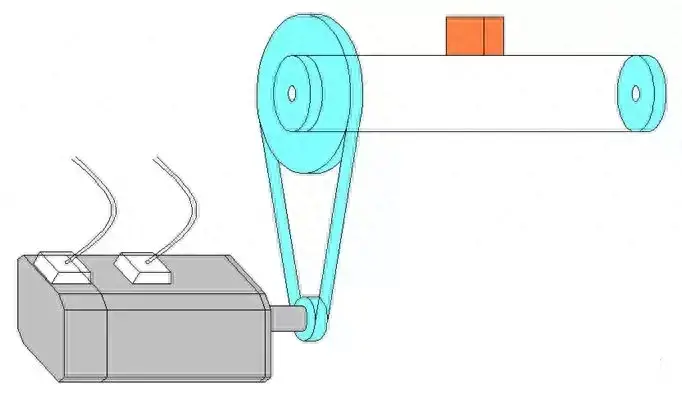
Quelle est la puissance minimale requise pour qu'un moteur puisse entraîner une telle charge ?
Le schéma de principe du composant est le suivant :
1. Calculer l'inertie de la charge réfléchie sur l'arbre du moteur :
JL = M * D2 / 4 / R12
= 50 * 144 / 4 / 100
= 18 [kg-cm2]
Selon le principe que l'inertie de la charge doit être inférieure à trois fois l'inertie du rotor du moteur (JM) :
JM > 6 [kg-cm2]
2. Calculer le couple nécessaire pour entraîner la charge du moteur :
Couple nécessaire pour surmonter les frottements :
Tf = M * g * µ * (D / 2) / R2 / R1
= 50 * 9.8 * 0.6 * 0.06 / 2 / 10
= 0,882 [N-m]
Couple nécessaire à l'accélération :
Ta = M * a * (D / 2) / R2 / R1
= 50 * (30 / 60 / 0.2) * 0.06 / 2 / 10
= 0,375 [N-m]
Le couple nominal du servomoteur doit être supérieur à Tfet le couple maximal doit être supérieur à Tf + Ta.
3. Calcul de la vitesse requise du moteur :
N = v / (πD) * R1
= 30 / (3.14 * 0.12) * 10
= 796 [tr/min]
Troisième cas
Compte tenu de ce qui précède :
- Poids de la charge M = 200 kg
- Pas de vis PB = 20 mm
- Diamètre de la vis DB = 50 mm
- Poids de la vis MB = 40 kg
- Coefficient de frottement µ = 0,2
- Rendement mécanique η = 0,9
- Vitesse de déplacement de la charge V = 30 m/min
- Durée totale du mouvement t = 1,4 s
- Temps d'accélération et de décélération t1 = t3 = 0.2 s
- Temps de repos t4 = 0.3 s
Veuillez sélectionner le servomoteur avec la puissance minimale qui répond aux exigences de la charge,
Le diagramme des composants est le suivant :
1. Calcul de l'inertie de la charge convertie en arbre moteur
Inertie de charge du poids converti en arbre de moteur
JW = M * (PB / 2π)²
= 200 * (2 / 6.28)²
= 20,29 [kg-cm²]
L'inertie de rotation de la vis
JB = MB * DB² / 8
= 40 * 25 / 8
= 125 [kg-cm²]
Inertie totale de la charge
JL = JW + JB = 145,29 [kg-cm²]
2. Calcul de la vitesse du moteur
Vitesse du moteur requise
N = V / PB
= 30 / 0.02
= 1500 [tr/min]
3. Calcul du couple nécessaire pour entraîner la charge du moteur
Le couple nécessaire pour surmonter les frottements
Tf = M * g * µ * PB / 2π / η
= 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9
= 1,387 [N-m]
Couple nécessaire lorsque le poids accélère
TA1 = M * a * PB / 2π / η
= 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9
= 1,769 [N-m]
Couple nécessaire lorsque la vis accélère
TA2 = JB * α / η
= JB * (N * 2π / 60 / t)1) / η
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9
= 10,903 [N-m]
Couple total nécessaire à l'accélération
TA = TA1 + TA2 = 12,672 [N-m]
4. Sélection du servomoteur
Couple nominal du servomoteur
T > Tf et T > Trms
Couple maximal du servomoteur
Tmax > Tf + TA
Enfin, le moteur ECMA-E31820ES a été sélectionné.