Moteur pas à pas
Principe de fonctionnement du moteur pas à pas
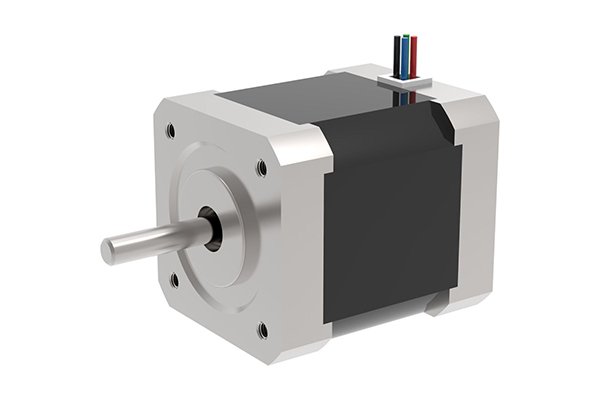
Un moteur pas à pas, un type de moteur spécialement conçu pour le contrôle, convertit les impulsions électriques en déplacement angulaire.
Lorsque le pilote pas à pas reçoit un signal d'impulsion, il fait tourner le moteur pas à pas à un angle fixe prédéterminé, appelé "angle de pas", dans la direction spécifiée.
Le moteur tourne pas à pas à l'angle de pas fixé.
Un positionnement précis peut être obtenu en contrôlant le nombre d'impulsions, et la régulation de la vitesse et de l'accélération de la rotation du moteur peut être réalisée en contrôlant la fréquence des impulsions.
L'inversion du sens de rotation du moteur peut être obtenue en modifiant l'ordre dans lequel les enroulements sont alimentés.
Principe de fonctionnement du moteur pas à pas
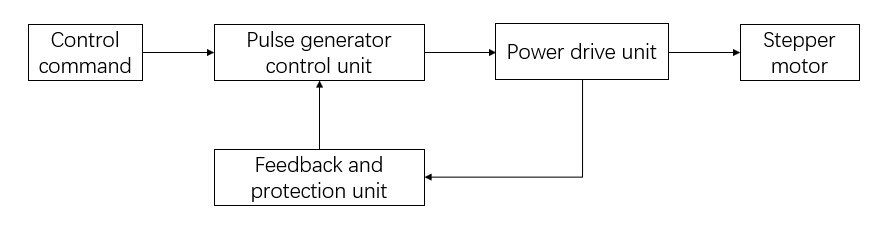
Un moteur pas à pas nécessite un pilote de moteur pas à pas spécialisé pour fonctionner. Ce pilote se compose d'une unité de contrôle des impulsions, d'une unité d'entraînement et d'une unité de protection.
L'unité d'entraînement amplifie les impulsions générées par l'unité de contrôle des impulsions et est directement connectée au moteur pas à pas, servant d'interface d'alimentation entre le moteur pas à pas et le microcontrôleur.
L'unité d'instruction de commande reçoit des signaux d'impulsion et de direction et génère un ensemble d'impulsions correspondantes, qui sont ensuite transmises au moteur pas à pas par l'intermédiaire de l'unité d'entraînement.
Le moteur pas à pas tourne alors d'un angle de pas défini dans la direction indiquée.
Le moteur pas à pas présente plusieurs caractéristiques techniques essentielles, telles que le couple statique maximal, fréquence de démarrageet la fréquence de fonctionnement.
En règle générale, plus l'angle de marche est faible, plus le couple statique maximal est important et plus les fréquences de démarrage et de fonctionnement sont élevées.
Par conséquent, le mode de fonctionnement met fortement l'accent sur la technologie d'entraînement de la subdivision.
Cette méthode améliore le couple et la résolution du moteur pas à pas et élimine complètement l'oscillation à basse fréquence.
Par conséquent, les performances des lecteurs de subdivision sont supérieures à celles des autres types de lecteurs.
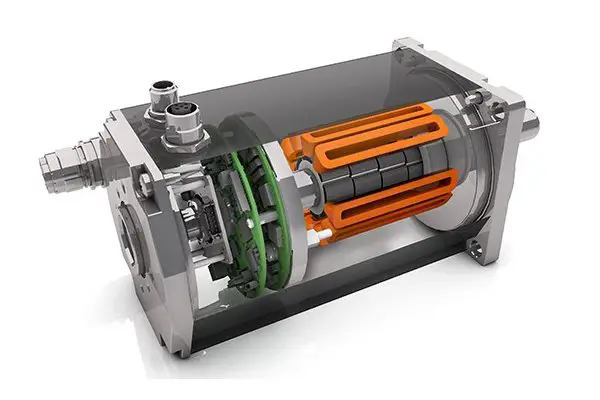
Le rotor d'un servomoteur est un aimant permanent. Le pilote contrôle l'électricité triphasée U/V/W pour créer un champ électromagnétique, entraînant la rotation du rotor sous l'influence de ce champ magnétique. Le codeur du moteur fournit des signaux de retour au pilote, qui ajuste l'angle de rotation du rotor en fonction de la valeur de retour et de la valeur cible.
Servomoteur
Le principe de fonctionnement du servomoteur
Le servomoteur, également appelé moteur exécutif, est utilisé comme actionneur dans les systèmes de contrôle automatique pour convertir les signaux électriques reçus en déplacement angulaire ou en vitesse angulaire sur l'arbre du moteur.
Il existe deux types de servomoteurs : DC et AC.
Lorsqu'un servomoteur reçoit une impulsion, il tourne à l'angle correspondant pour produire un déplacement. En effet, le servomoteur émet lui-même des impulsions, chaque angle de rotation émettant un nombre correspondant d'impulsions qui forment une boucle fermée avec les impulsions reçues par le servomoteur.
Le système peut ainsi contrôler le nombre d'impulsions qu'il envoie au servomoteur et le nombre d'impulsions qu'il reçoit, ce qui permet un contrôle et un positionnement précis.
En termes de performances, les servomoteurs à courant alternatif sont supérieurs aux servomoteurs à courant continu. Les servomoteurs à courant alternatif utilisent une commande sinusoïdale, ce qui se traduit par une faible ondulation du couple et une capacité élevée.
Les servomoteurs à courant continu, quant à eux, utilisent une commande à onde trapézoïdale et ont des performances relativement médiocres.
Toutefois, les servomoteurs sans balais et les servomoteurs à courant continu sont plus performants que les servomoteurs à balais.
Le principe de fonctionnement du servomoteur
L'intérieur d'un servomoteur contient un rotor à aimant permanent.
L'actionneur commande l'électricité triphasée U/V/W pour générer un champ électromagnétique, entraînant la rotation du rotor.
En outre, le codeur du moteur fournit des signaux de retour au conducteur.
Le conducteur ajuste l'angle de rotation du rotor en fonction de la valeur de retour et de la valeur cible souhaitée.
Servomoteur à courant continu à balais :
Le principe de fonctionnement du moteur est similaire à celui d'un moteur à courant continu standard.
L'actionneur a une structure à trois boucles, composée d'une boucle de courant, d'une boucle de vitesse et d'une boucle de position, disposées dans l'ordre de l'intérieur vers l'extérieur.
La sortie de la boucle de courant contrôle la tension de l'induit du moteur.
L'entrée de la boucle de courant est la sortie PID de la boucle de vitesse, l'entrée de la boucle de vitesse est la sortie PID de la boucle de position et l'entrée de la boucle de position est l'entrée spécifiée.
Le diagramme de contrôle est illustré ci-dessus.
Servomoteur à courant continu sans balais :
La source d'énergie est le courant continu, qui est transformé en courant alternatif U/V/W par un onduleur triphasé interne.
Le pilote utilise également une structure de contrôle à trois boucles (boucle de courant, boucle de vitesse, boucle de position), et son principe de contrôle est le même que celui décrit précédemment.
Servomoteur à courant alternatif :
Le système peut être divisé en deux modules distincts : le panneau d'alimentation et le panneau de contrôle, chacun ayant des fonctions distinctes.
Le panneau de commande émet des signaux PWM par le biais d'un algorithme correspondant, servant de circuit d'entraînement pour le signal d'entraînement, afin de modifier la puissance de sortie de l'onduleur et de contrôler le servomoteur AC synchrone triphasé à aimant permanent.
L'unité d'entraînement convertit d'abord l'électricité triphasée d'entrée ou l'électricité municipale en électricité à courant continu par le biais d'un circuit redresseur triphasé en pont complet.
Le servomoteur AC synchrone triphasé à aimant permanent est ensuite entraîné par le collecteur d'un onduleur sinusoïdal triphasé de type PWM, après redressement de l'électricité triphasée ou municipale.
Ce processus est simplement une conversion AC-DC-AC.
L'unité de commande est le cœur de l'ensemble du système d'asservissement CA et assure le contrôle de la position du système, le contrôle de la vitesse, le contrôle du couple et le contrôle du courant.
Comparaison des performances du servomoteur et du moteur pas à pas
Précision du contrôle
Plus le nombre de phases et de battements d'un moteur pas à pas est élevé, plus sa précision est grande.
Le servomoteur obtient un retour d'information de son propre codeur, et plus le codeur a d'échelles, plus sa précision est élevée.
Caractéristique des basses fréquences
Les moteurs pas à pas sont sujets à des vibrations de basse fréquence à faible vitesse.
Pour y remédier, les opérations à faible vitesse font souvent appel à la technologie de l'amortissement ou de la subdivision.
En revanche, les servomoteurs fonctionnent sans vibrations, même à faible vitesse.
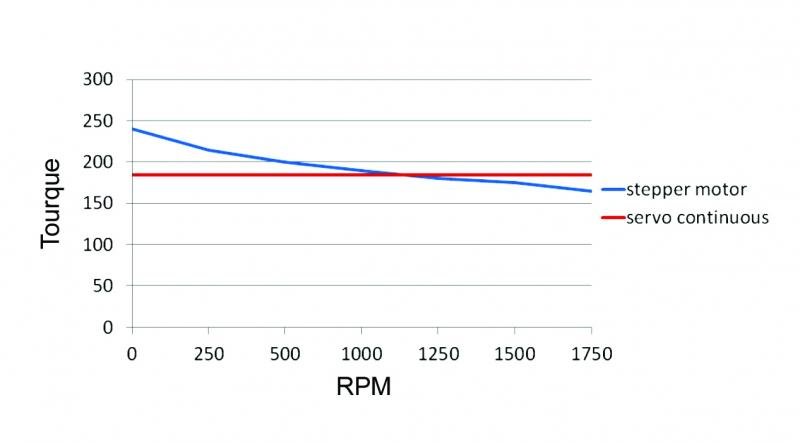
Caractéristique couple-fréquence
Le couple de sortie d'un moteur pas à pas diminue avec l'augmentation de la vitesse et chute de manière significative à grande vitesse.
En revanche, un servomoteur fournit un couple constant à sa vitesse nominale et une puissance constante à sa vitesse nominale.
Capacité de surcharge
Un moteur pas à pas n'a pas de capacité de surcharge, alors qu'un servomoteur possède une forte capacité de surcharge.
Performance des opérations
Les moteurs pas à pas fonctionnent en boucle ouverte, ce qui les rend susceptibles de perdre le pas ou de cesser de tourner si la fréquence de démarrage est trop élevée ou si la charge est trop lourde. Si la vitesse est trop élevée, il peut également en résulter un dépassement.
D'autre part, le système d'entraînement servo CA utilise un contrôle en boucle fermée. Le pilote du servomoteur échantillonne directement le signal de retour du codeur du moteur, formant ainsi des boucles internes de contrôle de la position et de la vitesse. Par conséquent, les moteurs pas à pas sont moins susceptibles de perdre le pas ou de dépasser les limites, ce qui rend les performances de contrôle plus fiables.
Vitesse Réponse Performance
Les moteurs pas à pas ont besoin de centaines de millisecondes pour passer d'un état statique à une vitesse de fonctionnement.
En comparaison, les servosystèmes à courant alternatif présentent d'excellentes performances d'accélération, qui ne prennent généralement que quelques millisecondes, ce qui les rend adaptés aux applications qui nécessitent des démarrages et des arrêts rapides.