Exploration du seuil de vibration pour les roulements de moteurs électriques
Comment déterminer le niveau maximum de vibrations pour les roulements de moteurs électriques ? Cette question cruciale concerne à la fois les limites opérationnelles et les essais après installation. L'article explore les normes internationales et nationales relatives aux limites de vibration, examine les conditions de charge et aborde les méthodes de mesure pratiques. En lisant cet article, vous comprendrez les facteurs qui influencent les vibrations des moteurs et apprendrez à mesurer et à interpréter ces vibrations avec précision dans diverses conditions de fonctionnement.
Il arrive fréquemment que l'on demande à combien s'élève la vibration maximale d'un roulement de moteur. En réalité, cette question pourrait être double. D'une part, quelle est la vibration maximale sous laquelle un roulement de moteur peut fonctionner et, d'autre part, après l'installation du moteur et les essais de vibration, quelle doit être la vibration maximale.
Dans le premier cas, il est possible de vérifier et de calculer le choix du roulement en considérant les vibrations environnementales comme une charge d'impact. En fait, la plupart de nos amis s'interrogent sur le second point, à savoir, pendant le fonctionnement du roulement du moteur, quelle devrait être la valeur maximale de la vibration du moteur et du roulement dans son ensemble. Discutons-en ici.
Il existe de nombreuses normes internationales et nationales correspondantes pour les valeurs limites des vibrations des roulements de moteur. Puisque nous disposons de normes, pourquoi de nombreuses personnes ont-elles encore des problèmes avec la limite maximale ? La question la plus fréquente est la suivante : ces limites s'appliquent-elles à vide ou à pleine charge ? S'agit-il de valeurs efficaces ou d'autres valeurs ?
Tout d'abord, examinons la norme ISO2372, comme le montre la figure suivante :
Limites de la plage de sévérité des vibrations (Velocity)
Plages de sévérité des vibrations pour les machines appartenant à:
Extrait de la norme ISO 2372
In/Sec(PK)
MM/Sec(RMS)
Classe I
Classe II
Classe III
Classe IV
<20HP
20-100 HP
>100HP
>100HP
0.015
0.28
A
A
A
A(Bon)
0.025
0.45
0.039
0.71
B
B
B
B(Autorisé)
0.062
1.12
0.099
1.8
C
C
C
C(tolérable)
0.154
2.8
0.248
4.5
D
D
D
D(non autorisé)
0.392
7.1
0.617
11.2
0.993
18
1.54
28
2.48
45
3.94
71
Il est facile de voir dans le tableau que les unités d'intensité des vibrations, y compris la vitesse efficace et le déplacement maximal, sont énumérées à gauche.
La question se pose donc de savoir si un ingénieur doit mesurer un moteur à vide ou à pleine charge. D'après notre compréhension des roulements de moteur, la charge de couple du moteur lui-même, qu'elle soit à vide ou à pleine charge, n'a pas d'impact significatif sur les roulements.
Par conséquent, du point de vue des roulements, le fait qu'ils soient à vide ou à pleine charge n'a pas d'incidence sur le résultat. Cependant, cela ne tient pas compte du stator du moteur. Dans les conditions de travail réelles, l'état du stator du moteur et la charge peuvent affecter la vibration globale du corps du moteur. Notez qu'il ne s'agit pas de la vibration du roulement, mais de la vibration globale.
Par conséquent, lors de la mesure d'un moteur, il existe une différence entre l'absence de charge et la pleine charge. Il faut en tenir compte dans les mesures réelles.
Selon la norme ISO 10816, les vibrations de l'équipement doivent être testées dans tous les états de fonctionnement possibles, la valeur maximale obtenue à l'issue des tests étant représentative de l'intensité des vibrations.
En d'autres termes, la valeur maximale est prise parmi tous les états de fonctionnement de l'équipement. Ces états comprennent non seulement l'absence de charge et la pleine charge, mais des considérations plus rigoureuses peuvent également inclure d'autres états intermédiaires.
La raison de cette disposition de la norme est de prendre en compte les dommages maximaux que les vibrations peuvent causer à l'équipement et de fixer l'intensité maximale admissible des vibrations. (Si les ingénieurs comprennent ce principe, ils sauront pourquoi le déplacement est choisi pour les vibrations à faible vitesse, la vitesse pour les vibrations à vitesse moyenne et l'accélération pour les vibrations à grande vitesse).
Bien entendu, les indications susmentionnées se rapportent à la sévérité des vibrations de l'équipement général. Pour les moteurs, il existe des normes plus détaillées.
Par exemple, la norme GB/T 5171.1-2014 stipule la limite de vibration de la vitesse nominale des petits moteurs de convertisseurs de puissance dans des conditions de charge nulle. La norme définit clairement que l'objet mesuré est la vibration à vide. Par conséquent, en vertu de cette norme, seules les vibrations à vide doivent être prises en compte.
Dans la pratique, les ingénieurs des usines de fabrication de moteurs peuvent choisir de mesurer les vibrations des moteurs en se référant aux normes correspondantes. Lors de la sélection, il ne s'agit pas seulement de lire les tableaux des normes, les explications qui les accompagnent peuvent être tout à fait cruciales. Si une certaine type de moteur n'a pas de norme respective, il devrait au moins se conformer aux stipulations de la norme ISO 2371 pour les équipements généraux.
En outre, outre les dispositions des normes susmentionnées, si l'utilisateur d'un moteur fixe une limite pour les vibrations du moteur, l'usine de fabrication de moteurs doit procéder à des mesures conformément aux normes du client.
N'oubliez pas que le partage, c'est l'entraide ! : )
Partager
Facebook
Twitter
LinkedIn
Reddit
VK
Courriel
Imprimer
Auteur
Shane
Fondateur de MachineMFG
En tant que fondateur de MachineMFG, j'ai consacré plus d'une décennie de ma carrière à l'industrie métallurgique. Ma vaste expérience m'a permis de devenir un expert dans les domaines de la fabrication de tôles, de l'usinage, de l'ingénierie mécanique et des machines-outils pour les métaux. Je suis constamment en train de réfléchir, de lire et d'écrire sur ces sujets, m'efforçant constamment de rester à la pointe de mon domaine. Laissez mes connaissances et mon expertise être un atout pour votre entreprise.
Imaginez qu'une simple surface en verre vous permette d'accéder à la précision des machines-outils. C'est exactement ce que font les échelles à réseaux linéaires, qui transforment les lignes fines en mesures extrêmement précises. Cet article explore comment ces...
Quel type de questions peut vous aider à réussir un entretien en génie mécanique ? Cet article présente les 20 questions les plus importantes qui mettent à l'épreuve divers aspects de l'ingénierie mécanique, des systèmes de transmission...
Vous êtes-vous déjà émerveillé de la polyvalence des ressorts dans le domaine de l'ingénierie mécanique ? Des suspensions automobiles aux instruments de précision, ces héros méconnus jouent un rôle crucial. Dans cet article de blog, nous...
Votre système hydraulique ne fonctionne pas comme prévu ? Comprendre comment calculer l'efficacité d'une pompe hydraulique peut changer la donne. Cet article décompose le processus en étapes simples, vous aidant...
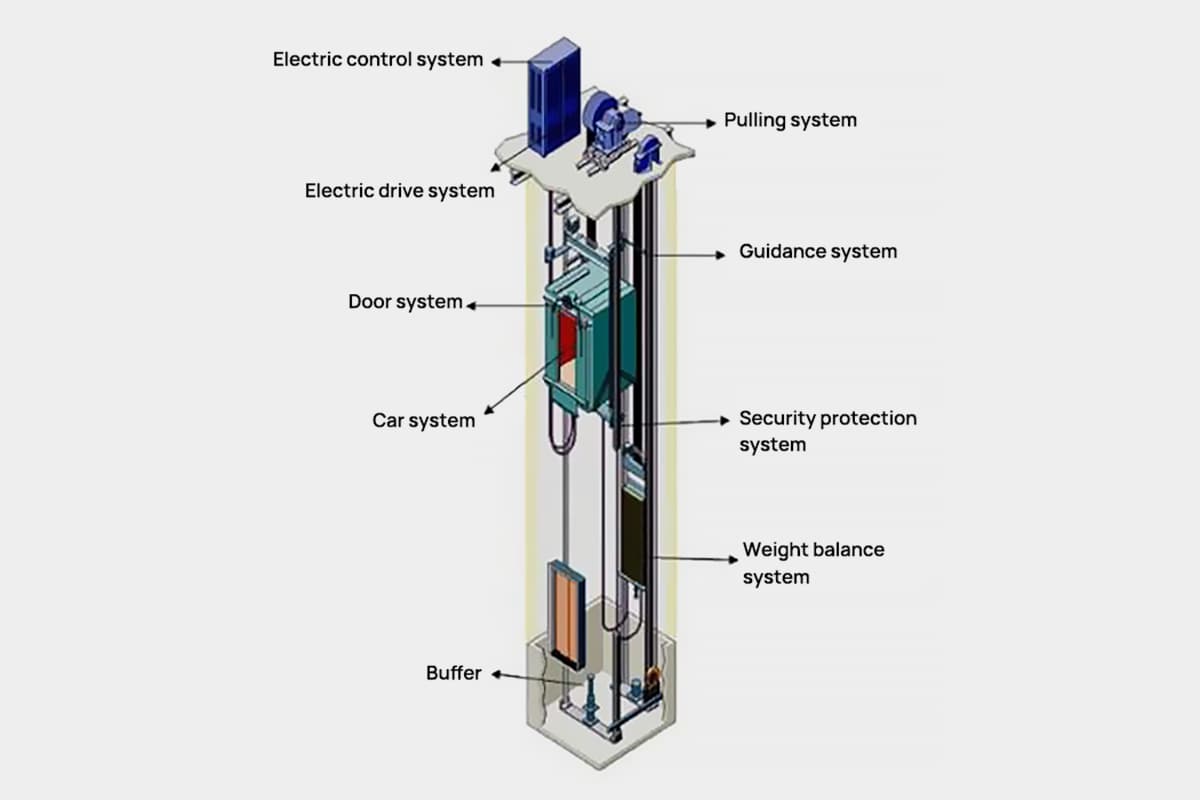
Vous êtes-vous déjà demandé ce qui vous permettait de rester en sécurité et de vous déplacer en douceur à l'intérieur d'un ascenseur ? Dans cet article, nous nous pencherons sur la structure complexe et les principes de fonctionnement des ascenseurs, en explorant leur...
Pourquoi des matériaux tels que le POM, le PTFE et le nylon sont-ils essentiels pour les machines non standard ? Cet article explore huit matériaux non métalliques couramment utilisés et indispensables à diverses applications mécaniques. De l'usure...
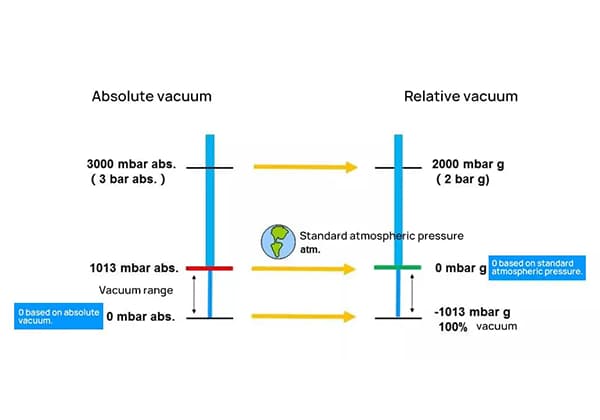
Vous recherchez les meilleurs fabricants de pompes à vide ? Cet article met en lumière les principales marques du secteur pour 2024, telles que NASH, Edwards, Leybold et Atlas Copco. Chaque entreprise est réputée pour...
Vous êtes-vous déjà demandé pourquoi les roulements de vos machines s'échauffent, entraînant des temps d'arrêt coûteux ? Les températures élevées des roulements peuvent réduire leur durée de vie et faire grimper les coûts de maintenance. Cet article se penche sur les causes les plus courantes, comme...
Imaginez un monde où les machines ne se contentent pas de fabriquer nos produits, mais pensent et apprennent comme nous. Dans cet article, nous examinons comment l'intelligence artificielle transforme l'industrie manufacturière....
Faites passer votre entreprise à la vitesse supérieure