Un capteur de déplacement à laser est un instrument de mesure qui utilise la technologie laser pour mesurer la position, le déplacement et d'autres changements d'un objet mesuré. Il se compose d'un laser, d'un détecteur laser et d'un circuit de mesure.
Ce type de capteur offre des mesures précises, sans contact, et est capable de mesurer le déplacement, l'épaisseur, la vibration, la distance, le diamètre et d'autres mesures géométriques précises. Le laser utilisé dans le capteur possède d'excellentes propriétés rectitude caractéristiques.
Par rapport aux capteurs à ultrasons, les capteurs de déplacement à laser ont un niveau de précision plus élevé. Toutefois, le dispositif de génération de laser est relativement complexe et volumineux, ce qui limite la gamme d'applications des capteurs de déplacement à laser.
1. Les principes de base
Un capteur de déplacement laser est un dispositif sans contact qui mesure avec précision la position, le déplacement et d'autres changements dimensionnels d'un objet. Il est largement utilisé dans les applications industrielles pour détecter le déplacement, l'épaisseur, les vibrations, la distance, le diamètre et diverses propriétés géométriques des matériaux et des composants.
Le principe de fonctionnement des capteurs de déplacement à laser peut être divisé en deux méthodes principales : la triangulation laser et l'analyse du temps de vol (TOF). La triangulation laser est généralement utilisée pour les mesures de haute précision à courte portée (généralement jusqu'à 1 mètre), tandis que l'analyse du temps de vol est plus adaptée aux mesures à longue portée (jusqu'à plusieurs centaines de mètres).
Voici un aperçu concis de ces deux méthodes de mesure :
- Triangulation laser :
Dans cette méthode, une diode laser émet un faisceau qui est réfléchi par la surface de la cible. La lumière réfléchie est ensuite focalisée à travers une lentille sur un détecteur sensible à la position (PSD) ou un dispositif à couplage de charge (CCD). Lorsque la distance de la cible change, l'angle de la lumière réfléchie varie, ce qui entraîne un déplacement de la position du faisceau sur le détecteur. Ce déplacement est utilisé pour calculer la distance ou le déplacement de l'objet avec une grande précision, généralement de l'ordre du micromètre.
- Analyse du temps de vol (TOF) :
Cette technique permet de mesurer le temps nécessaire à une impulsion laser pour faire l'aller-retour jusqu'à la cible. En connaissant la vitesse de la lumière et en mesurant le temps d'aller-retour à l'aide de circuits de chronométrage de haute précision, le capteur peut calculer la distance par rapport à l'objet. Les capteurs TOF peuvent mesurer de plus grandes distances, mais leur résolution est généralement inférieure à celle des capteurs à triangulation.
Le traitement du signal interne du capteur fait appel à des composants électroniques analogiques et numériques. La position de la lumière réfléchie sur l'élément récepteur est traitée, analysée par un microprocesseur et convertie en une valeur de sortie correspondante. Cette valeur est ensuite utilisée pour ajuster l'émission laser et affiner la mesure, ce qui garantit des performances optimales sur toute la plage de fonctionnement du capteur.
2. Objet de l'action
1. Mesure de la longueur
Pour mesurer un composant, il suffit de le placer à l'endroit prévu sur le tapis roulant. Le capteur laser, déclenché par le scanner laser, détectera et mesurera alors le composant, pour finalement déterminer sa longueur.
2. Contrôle de l'uniformité
Placer plusieurs capteurs laser dans le sens de l'inclinaison de la pièce à mesurer et faire en sorte qu'un seul capteur émette directement la valeur mesurée. En outre, un logiciel peut être utilisé pour calculer la valeur de mesure et afficher le résultat sur la base du signal ou des données reçus.
3. Inspection des composants électroniques
Utilisez deux scanners laser pour positionner les composants à mesurer entre eux, puis obtenez les données par le biais des capteurs pour évaluer la précision et l'exhaustivité des dimensions du composant.
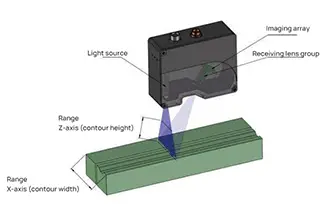
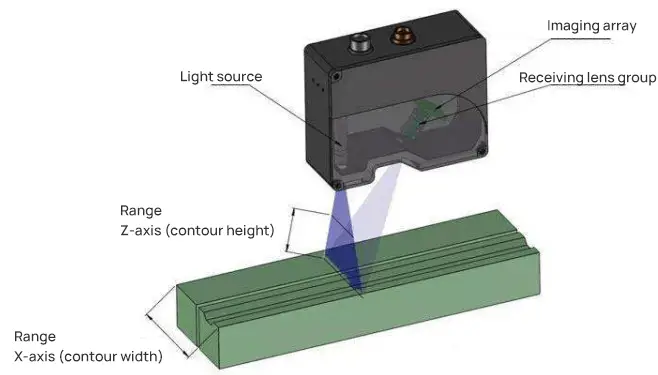
3. Triangulation
L'émetteur laser projette un laser rouge visible sur la surface de l'objet à mesurer à travers une lentille. La lumière laser diffusée par la surface de l'objet passe ensuite à travers la lentille du récepteur et est détectée par la caméra linéaire CCD interne.
En fonction de la distance de l'objet, la caméra linéaire CCD détecte la tache lumineuse sous différents angles. En utilisant cet angle et la distance connue entre le laser et la caméra, le processeur de signal numérique calcule la distance entre le capteur et l'objet.
La position du faisceau dans l'élément récepteur est ensuite traitée par des circuits analogiques et numériques, et la valeur de sortie correspondante est calculée par le microprocesseur. Le signal de données standard est émis proportionnellement dans la fenêtre analogique définie par l'utilisateur. Si la sortie de valeur de commutation est sélectionnée, elle sera activée à l'intérieur de la fenêtre définie et désactivée à l'extérieur de celle-ci.
Les sorties analogiques et de commutation peuvent avoir des fenêtres de détection séparées. Le capteur de déplacement laser, utilisant la triangulation, peut atteindre une linéarité maximale de 1um avec une résolution de 0,1um. Par exemple, le capteur de type ZLDS100 présente une résolution élevée de 0,01%, une linéarité élevée de 0,1%, une réponse rapide de 9,4KHz et la capacité de fonctionner dans des environnements difficiles.
4. Analyse de l'écho
Le capteur de déplacement laser utilise le principe de l'analyse de l'écho pour mesurer avec précision la distance. Le capteur est composé d'une unité de traitement, d'une unité de traitement de l'écho, d'un émetteur laser, d'un récepteur laser et d'autres composants.
Chaque seconde, l'émetteur laser envoie un million d'impulsions laser vers l'objet détecté, qui reviennent ensuite vers le récepteur. Le processeur calcule le temps nécessaire à l'impulsion laser pour atteindre l'objet et revenir, ce qui permet de calculer la valeur de la distance.
Cette valeur est déterminée en prenant la moyenne de milliers de mesures, en utilisant la méthode du temps d'impulsion. Bien que la méthode d'analyse de l'écho laser convienne à la détection à longue distance, sa précision est inférieure à celle de la méthode de triangulation laser. La plus grande distance de détection qu'elle peut atteindre est de 250 mètres.
5. Application des mesures
Les capteurs de déplacement laser sont largement utilisés pour mesurer diverses grandeurs physiques, notamment la longueur, la distance, les vibrations, la vitesse, l'orientation, etc. Ces capteurs ont également trouvé des applications dans la détection des défauts et la surveillance des polluants atmosphériques.
1. Mesure de la taille :
- Reconnaissance de la position des micro-composants
- Détection de la présence de composants sur la bande transporteuse
- Détection du chevauchement et de la couverture des matériaux
- Contrôle de la position du manipulateur (point central de l'outil)
- Surveillance de l'état de l'appareil
- Détection de la position de l'appareil par de petites ouvertures
- Surveillance des niveaux de liquide
- Mesure de l'épaisseur
- Analyse des vibrations
- Mesure des essais de collision
- Essais liés aux automobiles, etc.
2. Mesure de l'épaisseur des tôles et des feuilles :
Un capteur laser est utilisé pour mesurer l'épaisseur des feuilles de métal.
La détection des variations d'épaisseur peut aider à identifier les plis, les petits trous ou les chevauchements, ce qui permet d'éviter les pannes de machine.
3. Mesurer le cylindre et mesurer en même temps :
- Angle
- Longueur
- Excentricité des diamètres intérieur et extérieur
- Conicité
- Concentricité
- Profil de surface.
4. Mesure de la longueur :
Placez le composant à mesurer à l'endroit prévu sur la bande transporteuse. Le capteur laser détectera alors le composant et le mesurera simultanément à l'aide du scanner laser déclenché, pour finalement déterminer sa longueur.
5. Contrôle de l'uniformité :
Disposez plusieurs capteurs laser dans le sens de l'inclinaison de la pièce à mesurer. La valeur mesurée peut être directement émise par l'un des capteurs. En outre, un logiciel peut être utilisé pour calculer la valeur de mesure sur la base des signaux ou des données et fournir le résultat.
6. Inspection des composants électroniques :
Placez les composants mesurés entre deux scanners laser, puis lisez les données à travers le capteur pour détecter la précision et l'exhaustivité de la taille des composants.
7. Inspection du niveau de remplissage sur la ligne de production :
Le capteur laser est intégré dans le processus de production des produits de remplissage. Lorsque les produits de remplissage passent à travers le capteur, celui-ci peut détecter avec précision s'ils sont remplis à pleine capacité. Le capteur utilise un programme avancé de réflexion du faisceau laser sur la surface pour déterminer avec précision si le remplissage des produits est conforme aux normes et la quantité de produits.
8. Rectitude de l'objet mesurée par le capteur :
Tout d'abord, vous aurez besoin de 2 ou 3 capteurs de déplacement laser pour une mesure combinée, comme illustré sur la figure.
Ensuite, placez les trois capteurs de déplacement laser en ligne droite, parallèlement à la ligne de production, et déterminez l'espacement entre eux en fonction de la précision de mesure souhaitée.
Enfin, faites bouger l'objet dans une direction parallèle à la ligne d'installation des capteurs de déplacement laser.
Lorsque la ligne de production est alignée sur la ligne d'installation du capteur, plus la différence de distance mesurée par les trois capteurs est importante, moins la rectitude de l'objet est bonne. Inversement, une plus petite différence de distance mesurée par les trois capteurs indique que l'objet est plus droit.
Vous pouvez calculer le pourcentage de rectitude en tenant compte de la longueur de l'objet à mesurer et de l'espacement entre les trois installations de capteurs, ce qui permet d'obtenir un signal de sortie quantifiable.
Avec cette configuration, vous avez réussi à atteindre l'objectif de détection de la rectitude des objets.
6. Classification des capteurs de déplacement
1. Capteur de déplacement à courants de Foucault
Pouvoir de résolution :
La résolution d'un capteur à courants de Foucault peut atteindre 0,1 mm, ce qui est comparable à celle d'un capteur de déplacement laser.
Linéarité :
La linéarité d'un capteur à courants de Foucault est généralement faible, de l'ordre de 1% de la plage de mesure. En revanche, les capteurs de déplacement laser haut de gamme affichent une linéarité d'environ 0,1%.
Conditions de mesure :
Les capteurs à courants de Foucault nécessitent que l'objet testé soit un matériau conducteur et non magnétique, tel que l'aluminium ou le cuivre, mais pas le fer.
Les capteurs de déplacement laser, quant à eux, sont capables de mesurer des objets à la fois magnétiques et conducteurs.
2. Capteur de déplacement capacitif
La précision des capteurs de déplacement capacitifs est incroyablement élevée, dépassant celle des capteurs de déplacement laser. Cependant, leur portée est assez limitée, généralement inférieure à 1 mm. En revanche, les capteurs de déplacement laser ont une portée beaucoup plus grande, avec une plage de mesure maximale pouvant atteindre 2 mètres.
3. Capteur de déplacement à fibre optique
Le principe de mesure d'un capteur de déplacement à fibre optique consiste à déterminer le déplacement d'un objet en détectant les variations du flux lumineux et de l'intensité de la lumière réfléchie par la surface de l'objet en raison du déplacement.
La sonde du capteur se compose d'une fibre optique de transmission et d'une fibre optique de réception.
Pour les petits objets, les capteurs de déplacement sans contact conventionnels sont limités par la zone de réflexion, ce qui se traduit par des performances de mesure médiocres. Cependant, le capteur de déplacement à fibre optique peut être conçu avec une très petite sonde (d'un diamètre minimum de 0,2 mm), ce qui le rend adapté à la mesure de petits objets.
En outre, elle peut être réalisée sous la forme d'une transmission et d'une réception linéaires.
La valeur du déplacement est calculée en mesurant le degré de blindage de l'objet par rapport à la fibre optique pendant le processus de déplacement, avec une précision allant jusqu'à 0,01um.
La plage de mesure maximale du capteur est de 4 mm.