Apa itu motor tanpa sikat?
Motor DC Brushless adalah produk mekatronik yang terdiri dari badan motor dan driver.
Tidak seperti motor sinkron yang membutuhkan belitan awal pada rotor untuk memulai di bawah beban berat dengan pengaturan kecepatan frekuensi variabel, motor DC tanpa sikat beroperasi dalam mode kontrol mandiri. Motor ini tidak menghasilkan osilasi atau menjadi tidak selaras ketika ada perubahan mendadak pada beban.
Mayoritas motor DC brushless berukuran kecil dan menengah menggunakan magnet rare earth neodymium iron boron (Nd-Fe-B) karena tingkat energi magnetiknya yang tinggi.
Hasilnya, motor brushless magnet permanen tanah jarang memiliki ukuran rangka yang lebih kecil daripada motor asinkron tiga fase dengan kapasitas yang sama.
Apa itu bmotor terburu-buru?
Motor sikat adalah motor berputar yang menggunakan perangkat sikat untuk mengubah energi listrik menjadi energi mekanik (sebagai motor) atau energi mekanik menjadi energi listrik (sebagai generator). Tidak seperti motor tanpa sikat, perangkat sikat digunakan untuk memasukkan atau menarik tegangan dan arus.
Motor sikat adalah fondasi dari semua motor, yang memiliki beberapa fitur yang menguntungkan seperti start cepat, pengereman tepat waktu, pengaturan kecepatan yang mulus pada rentang yang luas, dan sirkuit kontrol yang relatif sederhana.
Perbedaan antara motor tanpa sikat dan motor sikat dalam prinsip kerja
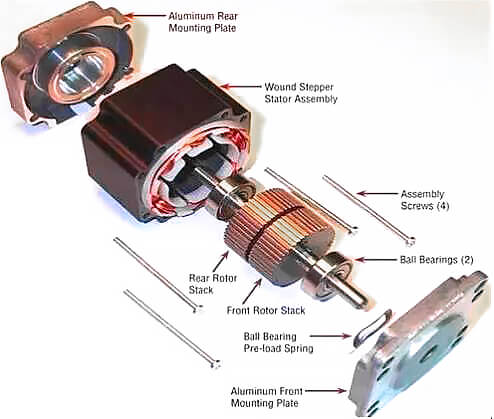
1. Prinsip kerja motor sikat
Motor yang disikat adalah yang pertama jenis motor yang sering kita jumpai, dan sering digunakan sebagai model untuk mengilustrasikan motor di kelas fisika semasa sekolah menengah.
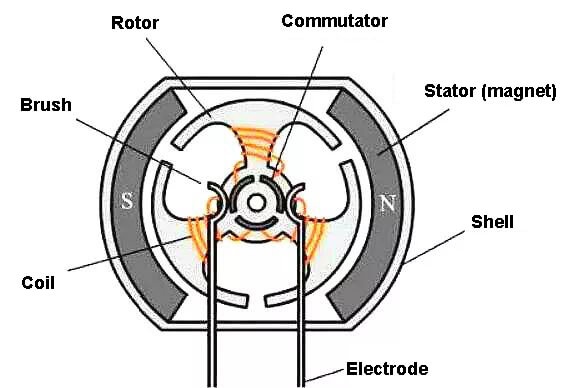
Komponen utama dari motor yang disikat adalah stator, rotor, dan sikat.
Torsi berputar dihasilkan melalui medan magnet yang berputar, yang memungkinkan dihasilkannya energi kinetik.
Sikat dan komutator selalu bersentuhan dan bergesekan, dan keduanya memainkan peran penting dalam konduksi dan komutasi selama rotasi.
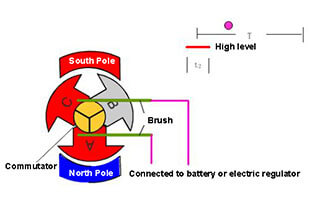
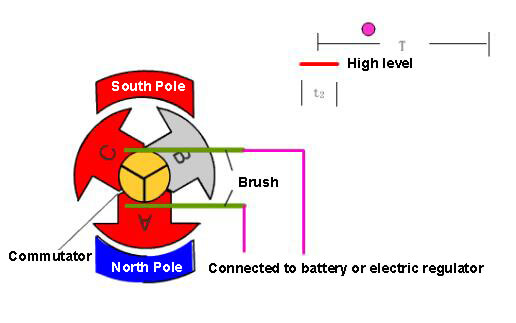
Motor sikat menggunakan pergantian mekanis, di mana kutub magnet tetap diam sementara kumparan berputar.
Selama pengoperasian, kumparan dan komutator berputar, sedangkan baja magnet dan sikat karbon tetap diam. Komutator dan sikat yang berputar bersama motor memungkinkan penyelesaian perubahan arah arus kumparan secara bergantian.
Pada motor sikat, proses ini melibatkan pengaturan dua terminal input daya dari setiap kelompok kumparan ke dalam sebuah cincin. Terminal input daya dipisahkan satu sama lain dengan bahan isolasi dan dibentuk menjadi silinder yang terhubung dengan poros motor.
Kolom kecil yang terbuat dari dua elemen karbon (sikat karbon) digunakan untuk melewatkan catu daya. Sikat karbon bergerak dari dua posisi tetap tertentu di bawah aksi tekanan pegas. Pemberian energi pada sekelompok kumparan dicapai dengan menekan dua titik pada silinder cincin masukan daya kumparan atas.
Saat motor berputar, kumparan yang berbeda atau kutub yang berbeda dari kumparan yang sama diberi energi pada waktu yang berbeda. Hal ini menciptakan perbedaan sudut yang sesuai antara kutub N-S medan magnet yang dihasilkan oleh kumparan dan kutub N-S stator magnet permanen terdekat. Medan magnet menarik dan menolak satu sama lain, menghasilkan gaya dan menggerakkan motor untuk berputar.
Sikat karbon bergeser pada konektor koil, mirip seperti sikat pada permukaan benda, oleh karena itu disebut "sikat" karbon. Namun demikian, pergeseran di antara keduanya menyebabkan gesekan dan kehilangan, sehingga memerlukan penggantian sikat karbon secara teratur.
Lebih jauh lagi, pergantian on-off antara sikat karbon dan konektor koil menghasilkan percikan listrik, menghasilkan pemutusan elektromagnetik, dan mengganggu peralatan elektronik.
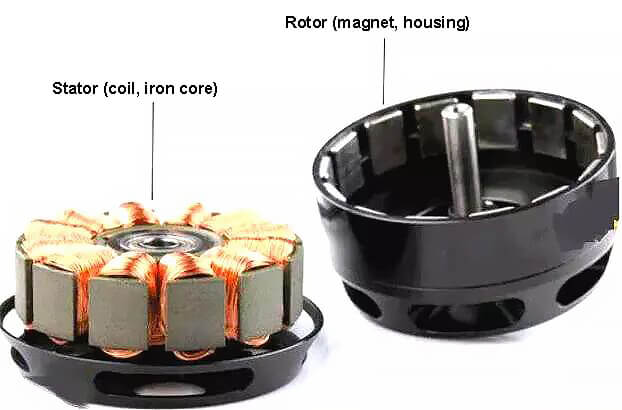
2. Prinsip kerja motor tanpa sikat
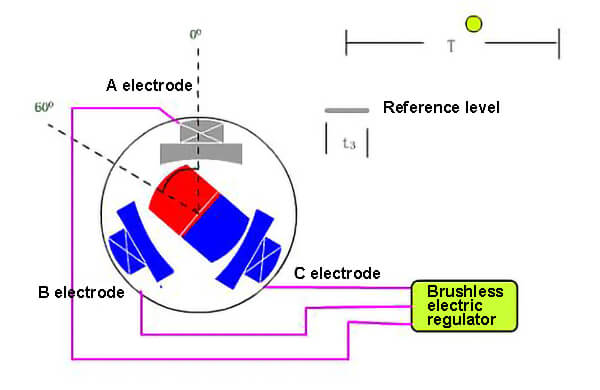
Pada motor tanpa sikat, pergantian dilakukan oleh sirkuit kontrol di dalam pengontrol. Biasanya, ini melibatkan sensor Hall dan pengontrol, meskipun teknologi yang lebih canggih seperti encoder magnetik juga dapat digunakan.
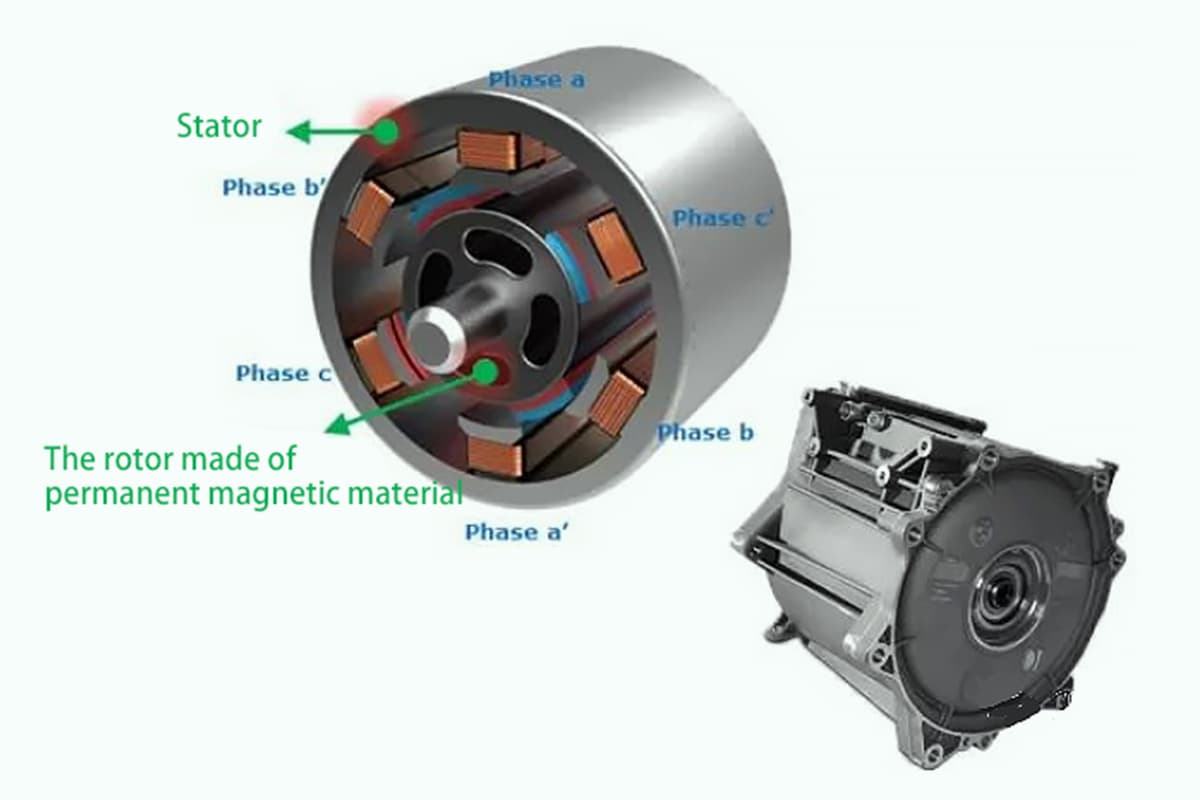
Motor tanpa sikat menggunakan pergantian elektronik, dengan kumparan tetap diam sementara kutub magnet berputar.
Untuk mendeteksi posisi kutub magnet magnet permanen, motor brushless menggunakan seperangkat peralatan elektronik yang menggabungkan elemen hall.
Berdasarkan pendeteksian ini, sirkuit elektronik mengalihkan arah arus pada koil secara tepat waktu untuk memastikan bahwa motor menghasilkan gaya magnet pada arah yang benar untuk menggerakkannya.
Kerugian motor sikat dihilangkan dalam motor tanpa sikat.
Rangkaian ini dikenal sebagai pengendali motor.
Pengontrol motor brushless juga dapat mencapai beberapa fungsi yang tidak dapat dilakukan oleh motor brush, seperti menyesuaikan sudut peralihan daya, pengereman, membalikkan, mengunci, dan menghentikan catu daya ke motor dengan memanfaatkan sinyal pengereman. Kunci alarm elektronik mobil baterai memanfaatkan sepenuhnya fungsi-fungsi ini.
Motor DC tanpa sikat, yang terdiri dari bodi motor dan driver, adalah produk mekatronik standar.
Karena motor DC tanpa sikat beroperasi dalam mode kontrol mandiri, motor ini tidak memerlukan belitan start pada rotor, seperti motor sinkron yang start di bawah beban berat dengan pengaturan kecepatan frekuensi variabel. Motor ini juga tidak menghasilkan osilasi atau menjadi tidak selaras saat terjadi perubahan beban secara tiba-tiba.
Perbedaan kinerja
1. Motor sikat memiliki struktur sederhana, waktu pengembangan yang lama, dan teknologi yang matang
Pada awal abad ke-19 ketika motor pertama kali dikembangkan, motor praktis adalah motor tanpa sikat. Hal ini mengacu pada motor asinkron sangkar tupai AC, yang mulai digunakan secara luas setelah generasi AC.
Namun, motor asinkron memiliki banyak cacat yang tidak dapat diatasi, yang menghambat perkembangan teknologi motor. Secara khusus, motor DC tanpa sikat tidak tersedia secara komersial untuk waktu yang lama. Hanya dalam beberapa tahun terakhir, dengan kemajuan pesat teknologi elektronik, motor ini tersedia untuk operasi komersial.
Namun demikian, motor DC tanpa sikat masih termasuk dalam kategori motor AC.
Segera setelah penemuan motor tanpa sikat, motor tanpa sikat DC dikembangkan. Motor DC brushless populer karena mekanismenya yang sederhana, produksi dan pemrosesan yang mudah, perawatan yang nyaman, dan kontrol yang mudah.
Motor DC juga memiliki karakteristik seperti respons yang cepat, torsi awal yang besar, dan kemampuan untuk memberikan torsi terukur dari kecepatan nol hingga kecepatan terukur. Hasilnya, motor ini langsung digunakan secara luas setelah diperkenalkan.
2. Motor DC brushless memiliki kecepatan respons yang cepat dan torsi awal yang besar
Motor sikat DC memiliki beberapa keunggulan, termasuk respons start yang cepat, torsi start yang signifikan, perubahan kecepatan yang stabil, getaran minimal dari nol hingga kecepatan maksimum, dan kemampuan untuk menggerakkan beban yang lebih besar selama start.
Di sisi lain, motor tanpa sikat memiliki beberapa kekurangan seperti resistansi awal yang tinggi (reaktansi induktif), sehingga menghasilkan faktor daya yang rendah dan torsi awal yang relatif kecil. Motor ini juga menghasilkan suara mendengung saat start dan getaran yang kuat, dan hanya dapat menggerakkan beban yang lebih kecil selama start.
3. Motor sikat DC bekerja dengan stabil dan memiliki efek start dan pengereman yang baik
Motor sikat diatur oleh voltase, memastikan start, pengereman, dan operasi kecepatan konstan yang stabil.
Di sisi lain, motor tanpa sikat biasanya dikontrol oleh konversi frekuensi digital. Proses ini melibatkan konversi AC ke DC, lalu kembali ke AC, dan menggunakan perubahan frekuensi untuk mengontrol kecepatan.
Akibatnya, motor tanpa sikat dapat mengalami kinerja yang tidak stabil dan getaran yang signifikan selama penyalaan dan pengereman. Motor ini hanya menjadi stabil ketika beroperasi pada kecepatan konstan.
4. Ketepatan kontrol yang tinggi dari motor DC brushless
Motor DC brushless biasanya dikombinasikan dengan peredam dan dekoder untuk meningkatkan daya output motor dan meningkatkan akurasi kontrol.
Dengan akurasi kontrol yang dapat mencapai 0,01 mm, motor dapat menghentikan bagian yang bergerak pada hampir semua posisi yang diinginkan.
Motor DC mengontrol semua peralatan mesin presisi.
Namun demikian, motor brushless tidak stabil selama start dan pengereman, dan bagian yang bergerak akan berhenti pada posisi yang berbeda setiap kali.
Untuk mencapai posisi yang diinginkan, pin penunjuk lokasi atau stopper harus digunakan.
5. Motor sikat DC memiliki keunggulan biaya rendah dan perawatan yang mudah
Motor sikat DC banyak digunakan karena strukturnya yang sederhana, biaya produksi yang rendah, jumlah produsen yang banyak, dan teknologi yang matang. Ini biasanya digunakan di pabrik, peralatan mesin pemrosesan, instrumen presisi, dan aplikasi lainnya.
Jika terjadi kerusakan motor, cukup dengan mengganti sikat karbon saja sudah cukup. Setiap sikat karbon hanya berharga beberapa yuan, menjadikannya solusi yang terjangkau.
Di sisi lain, teknologi untuk motor tanpa sikat masih belum matang, harganya mahal, dan kisaran aplikasinya terbatas. Ini paling cocok untuk peralatan kecepatan konstan seperti AC frekuensi variabel dan lemari es. Jika motor tanpa sikat rusak, motor ini hanya dapat diganti.
6. Tanpa sikat, interferensi rendah
Motor tanpa sikat meniadakan kebutuhan akan sikat, sehingga menghasilkan perubahan yang signifikan: tidak ada percikan listrik yang dihasilkan selama pengoperasiannya. Hal ini berdampak langsung pada pengurangan gangguan yang disebabkan oleh percikan listrik pada peralatan radio kendali jarak jauh.
7. Kebisingan yang rendah dan pengoperasian yang lancar
Motor tanpa sikat beroperasi tanpa sikat, menghasilkan gesekan yang berkurang secara signifikan, pengoperasian yang lebih mulus, dan tingkat kebisingan yang jauh lebih rendah. Manfaat ini sangat berkontribusi pada stabilitas operasional model.
8. Umur pemakaian yang panjang dan biaya perawatan yang rendah
Karena motor tanpa sikat beroperasi tanpa sikat, sumber utama keausan adalah pada bantalan. Dari perspektif mekanis, motor tanpa sikat hampir bebas perawatan. Jika diperlukan, perawatan pembersihan debu yang sederhana adalah yang diperlukan.
Perbedaan mode pengaturan kecepatan
Kontrol kedua motor dicapai melalui pengaturan tegangan. Motor DC tanpa sikat menggunakan pergantian elektronik dan dapat direalisasikan dengan kontrol digital, sedangkan sirkuit analog tradisional seperti thyristor dapat digunakan untuk pergantian melalui sikat karbon pada motor DC sikat, sehingga relatif sederhana.
1. Proses pengaturan kecepatan motor sikat melibatkan penyesuaian tegangan catu daya motor. Tegangan dan arus yang disesuaikan dikonversi melalui komutator dan sikat untuk mengubah kekuatan medan magnet yang dihasilkan oleh elektroda, sehingga mengubah kecepatan. Proses ini dikenal sebagai pengaturan kecepatan tegangan variabel.
2. Sebaliknya, proses pengaturan kecepatan motor tanpa sikat melibatkan menjaga tegangan catu daya motor tidak berubah sambil mengubah sinyal kontrol pengaturan listrik. Laju pengalihan transistor MOS berdaya tinggi diubah oleh mikroprosesor untuk mengubah kecepatan. Proses ini disebut pengaturan kecepatan frekuensi variabel.