Menjelajahi Jenis dan Prinsip Motor dalam Manufaktur
Bayangkan dunia tanpa dengungan motor-tidak ada mobil, tidak ada peralatan, tidak ada mesin industri. Motor mengubah energi listrik menjadi energi mekanik, menggerakkan segala sesuatu mulai dari mainan hingga pabrik raksasa. Dalam artikel ini, kita akan menjelajahi berbagai jenis motor, prinsip kerja, dan aplikasinya. Dengan memahami dasar-dasar ini, Anda akan mendapatkan wawasan tentang bagaimana perangkat yang sangat diperlukan ini membentuk kehidupan modern kita dan inovasi yang mereka dorong dalam lanskap industri.
Hampir setengah dari konsumsi daya dunia disebabkan oleh motor, sehingga penggunaan motor secara efisien merupakan salah satu langkah paling efektif untuk mengatasi masalah energi global.
Motor adalah perangkat yang mengubah energi listrik menjadi energi mekanik. Motor ini menggunakan kumparan bertenaga (belitan stator) untuk menghasilkan medan magnet yang berputar, yang bekerja pada rotor (seperti bingkai aluminium tertutup sangkar tupai) untuk menciptakan torsi magnetik yang berputar.
Motor dibagi menjadi motor arus searah (DC) dan motor arus bolak-balik (AC) berdasarkan jenis catu daya yang digunakan. Sebagian besar motor dalam sistem daya adalah motor AC, yang dapat berupa motor sinkron atau asinkron (kecepatan putaran medan magnet stator motor tidak disinkronkan dengan kecepatan putaran rotor).
Sebuah motor pada dasarnya terdiri dari stator dan rotor. Arah gerakan konduktor bertenaga dalam medan magnet terkait dengan arah arus dan arah garis medan magnet. Prinsip kerja motor adalah kekuatan medan magnet pada arus, menyebabkan motor berputar.
Kontrol motor mengacu pada kontrol start, akselerasi, operasi, perlambatan, dan penghentian motor. Terdapat persyaratan dan tujuan yang berbeda tergantung pada jenis motor dan keadaan di mana motor digunakan. Untuk motor, melalui kontrol motor, tujuan start cepat, respons cepat, efisiensi tinggi, output torsi tinggi, dan kapasitas beban berlebih yang tinggi dapat dicapai.
Motor standar, servomotor, motor stepper, dan motor servo yang disebutkan di sini mengacu pada mikromotor DC, yang sering kita jumpai. Motor, juga dikenal sebagai "motor", mengacu pada perangkat induksi elektromagnetik yang mempertahankan transformasi atau transmisi energi elektromagnetik menurut hukum induksi elektromagnetik Faraday.
Motor, juga dikenal sebagai "mesin listrik", diwakili dalam rangkaian listrik dengan huruf Inggris "M" (sebelumnya diwakili oleh "D"). Fungsi utamanya adalah menghasilkan torsi penggerak sebagai sumber daya untuk peralatan listrik atau berbagai mesin. Generator diwakili oleh huruf "G" dalam rangkaian.
1. Jenis-jenis Motor
Umumnya, motor mengacu pada perangkat yang mengubah gaya yang dihasilkan oleh aliran arus listrik dalam medan magnet menjadi gerakan rotasi, dan dalam arti yang lebih luas, gerakan linier juga.
Motor dapat diklasifikasikan ke dalam dua kategori berdasarkan sumber dayanya: Motor DC dan motor AC.
Mereka juga dapat dikategorikan secara kasar berdasarkan prinsip rotasinya, dengan beberapa pengecualian untuk jenis motor khusus.
(1) Motor DC
Motor Sikat
Motor sikat yang banyak digunakan umumnya disebut sebagai motor DC. Rotor berputar dengan mengalihkan arus melalui elektroda yang disebut "sikat" (di sisi stator) dan "komutator" (di sisi angker).
Motor DC Tanpa Sikat
Motor ini tidak memerlukan sikat atau komutator, melainkan menggunakan fungsi switching seperti transistor untuk mengalihkan arus dan memutar motor.
Motor Stepper
Motor ini beroperasi secara sinkron dengan daya pulsa dan oleh karena itu juga disebut motor pulsa. Karakteristiknya adalah pengoperasian pemosisian yang mudah dan akurat.
(2) Motor AC
Motor asinkron
Arus bolak-balik menyebabkan stator menghasilkan medan magnet yang berputar, yang menyebabkan rotor menghasilkan arus induksi dan berputar di bawah interaksinya.
Motor sinkron
AC menciptakan medan magnet yang berputar, dan rotor dengan medan magnet berputar karena tarikan. Laju rotasi disinkronkan dengan frekuensi daya.
Tentang Arus Listrik, Medan Magnet, dan Gaya
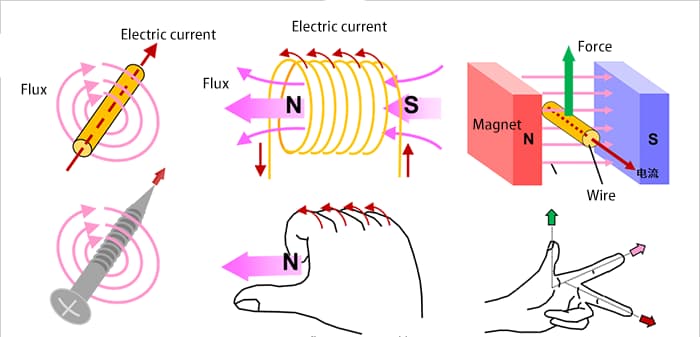
Pertama-tama, untuk memfasilitasi penjelasan prinsip motorik, mari kita tinjau kembali hukum dasar arus listrik, medan magnet, dan gaya. Walaupun mungkin membawa rasa nostalgia, namun pengetahuan ini mudah dilupakan jika seseorang tidak sering menggunakan komponen magnetik.
Kami akan menggunakan gambar dan rumus untuk mengilustrasikan hal ini.
Diagram skematik rotasi motor
Apabila loop kawat berbentuk persegi panjang, kita perlu mempertimbangkan gaya yang bekerja pada arus.
Gaya F yang bekerja pada sisi a dan c dapat dihitung dengan rumus berikut:
Hal ini menghasilkan torsi pada poros tengah.
Sebagai contoh, ketika mempertimbangkan keadaan di mana sudut rotasi hanya θ, gaya yang bekerja pada b dan d pada sudut siku-siku adalah sinθ. Oleh karena itu, torsi Ta pada sisi a dapat dinyatakan dengan rumus berikut ini:
Dengan cara yang sama, mempertimbangkan sisi c, torsi berlipat ganda dan menghasilkan torsi yang dihitung dengan rumus berikut:
Karena luas persegi panjang adalah S = h x l, maka dengan menggantinya ke dalam rumus di atas, akan diperoleh hasil sebagai berikut:
Rumus ini tidak hanya berlaku untuk persegi panjang tetapi juga untuk bentuk umum lainnya seperti lingkaran. Motor memanfaatkan prinsip ini.
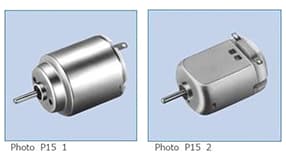
Motor Standar
Motor standar, yang sering terlihat pada barang sehari-hari seperti mainan listrik dan pisau cukur listrik, biasanya merupakan motor yang disikat arus searah. Ditandai dengan kecepatan tinggi dan torsi rendah, motor ini hanya membutuhkan dua pin untuk beroperasi. Ketika dihubungkan ke terminal positif dan negatif baterai, motor mulai berputar. Membalikkan koneksi akan menyebabkan motor berputar ke arah yang berlawanan.
Motor Pengurangan Gigi
Motor reduksi roda gigi adalah motor standar yang dilengkapi dengan kotak roda gigi. Desain ini menurunkan kecepatan rotasi sekaligus meningkatkan torsi, sehingga memperluas jangkauan aplikasi praktis untuk motor standar.
Motor Servo
Motor servo terutama terdiri dari cangkang, papan sirkuit, motor tanpa biji, roda gigi, dan detektor posisi. Motor ini beroperasi dengan menerima sinyal dari penerima ke motor servo. IC onboard menentukan arah rotasi dan menggerakkan motor tanpa biji untuk mulai berputar.
Gerakan ditransmisikan ke lengan ayun melalui roda gigi reduksi, dan detektor posisi secara bersamaan mengirimkan sinyal balik untuk memverifikasi apakah posisi yang diinginkan telah tercapai. Detektor posisi pada dasarnya adalah resistor variabel, yang mengubah nilai resistansi saat motor servo berputar. Dengan mendeteksi nilai resistansi ini, sudut rotasi dapat ditentukan.
Spesifikasi yang disediakan oleh produsen motor servo biasanya mencakup dimensi (mm), torsi (kg/cm), kecepatan (detik/60°), tegangan uji (V), dan berat (g). Satuan torsi adalah kg/cm, mengindikasikan berapa kilogram yang dapat diangkat pada panjang lengan ayun 1 cm.
Ini adalah konsep lengan pengungkit, oleh karena itu, semakin panjang lengannya, semakin rendah torsinya. Satuan kecepatan adalah detik/60°, mewakili waktu yang diperlukan motor servo untuk berputar 60°.
Motor Stepper
Motor stepper adalah elemen kontrol loop terbuka yang mengubah sinyal pulsa listrik menjadi perpindahan sudut atau linier. Dalam kondisi tanpa beban berlebih, kecepatan dan posisi berhenti motor hanya bergantung pada frekuensi dan jumlah sinyal pulsa, terlepas dari perubahan beban.
Ketika driver stepper menerima sinyal pulsa, driver ini menggerakkan motor stepper untuk memutar sudut tetap, yang dikenal sebagai "sudut langkah", ke arah yang telah ditentukan sebelumnya. Rotasi ini berlangsung dalam kenaikan sudut tetap. Jumlah pulsa dapat dikontrol untuk mengatur perpindahan sudut, sehingga mencapai pemosisian yang tepat. Demikian pula, frekuensi pulsa dapat digunakan untuk mengontrol kecepatan rotasi dan akselerasi motor, sehingga mencapai pengaturan kecepatan.
Motor servo, juga dikenal sebagai motor aktuator, berfungsi sebagai unit pelaksana dalam sistem kontrol otomatis, mengubah sinyal listrik yang diterima menjadi perpindahan sudut atau output kecepatan sudut pada poros motor.
Motor ini tersedia dalam dua kategori utama: motor servo arus searah (DC) dan arus bolak-balik (AC). Karakteristik utama dari motor ini adalah bahwa tidak ada fenomena rotasi sendiri ketika tegangan sinyal nol dan kecepatan rotasi menurun secara seragam saat torsi meningkat.
Motor servo terutama mengandalkan pulsa untuk penentuan posisi. Pada dasarnya, motor servo berputar dengan sudut yang sesuai dengan pulsa untuk setiap pulsa yang diterima, sehingga mencapai perpindahan. Karena motor servo itu sendiri memiliki kemampuan untuk memancarkan pulsa, motor ini memancarkan sejumlah pulsa yang sesuai untuk setiap derajat putarannya.
Hal ini membentuk sistem responsif atau 'loop tertutup' dengan pulsa yang diterima. Dengan cara ini, sistem mengetahui berapa banyak pulsa yang telah dikirim ke motor servo dan berapa banyak pulsa yang telah diterima kembali. Akibatnya, sistem ini dapat mengontrol putaran motor dengan sangat tepat, memungkinkan pemosisian yang tepat hingga 0,001mm.
Motor servo secara luas dibagi menjadi kategori servo AC dan servo DC.
Motor servo AC dibagi lagi menjadi motor servo AC asinkron dan motor servo AC sinkron.
Motor servo DC dibagi menjadi motor yang disikat dan motor tanpa sikat. Motor yang disikat berbiaya rendah, strukturnya sederhana, menghasilkan torsi awal yang tinggi, memiliki berbagai kontrol kecepatan, dan mudah dikendalikan. Motor ini memerlukan perawatan, tetapi tidak nyaman (misalnya, penggantian sikat), dan menghasilkan gangguan elektromagnetik serta memiliki persyaratan lingkungan tertentu. Oleh karena itu, mereka cocok untuk aplikasi industri umum dan sipil yang sensitif terhadap biaya.
2. Bagaimana Motor Berputar?
1)Motor Berputar dengan Bantuan Magnet dan Gaya Magnet
Mengelilingi magnet permanen dengan poros yang berputar,
(1) Memutar magnet (untuk menghasilkan medan magnet yang berputar),
② Menurut prinsip kutub yang berlawanan menarik dan kutub yang sama menolak antara kutub N dan kutub S,
③ Magnet dengan poros yang berputar akan berputar.
Ini adalah prinsip dasar rotasi motor.
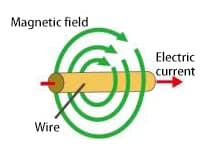
Aliran arus melalui kawat menghasilkan medan magnet yang berputar (gaya magnet) di sekelilingnya, yang menyebabkan magnet berputar.
Sebenarnya, ini adalah kondisi operasional yang sama seperti yang dijelaskan sebelumnya.
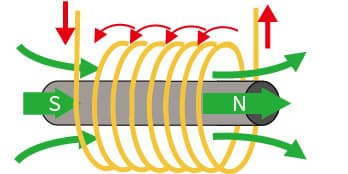
Selain itu, jika kawat dililitkan ke dalam kumparan, gaya magnet digabungkan untuk membentuk fluks medan magnet yang besar (fluks magnetik), yang menghasilkan kutub N dan S.
Memasukkan inti besi ke dalam kawat berbentuk kumparan memudahkan garis medan magnet untuk melewatinya dan menghasilkan gaya magnet yang lebih kuat.
2) Motor Berputar Praktis
Di sini, kami akan memperkenalkan metode praktis menggunakan AC tiga fase dan kumparan untuk menghasilkan medan magnet yang berputar sebagai motor yang berputar.
(AC tiga fase adalah sinyal AC dengan perbedaan fase 120°.)
Medan magnet gabungan dalam keadaan di atas ① sesuai dengan gambar ① di bawah ini.
Medan magnet gabungan dalam keadaan ② di atas, sesuai dengan gambar ② di bawah ini.
Medan magnet gabungan dalam keadaan ③ di atas, sesuai dengan gambar ③ di bawah ini.
Seperti disebutkan di atas, kumparan yang dililitkan di sekeliling inti besi dibagi menjadi tiga fase, dengan kumparan fase-U, kumparan fase-V, dan kumparan fase-W yang disusun pada interval 120°.
Kumparan dengan tegangan tinggi menghasilkan kutub N, sedangkan kumparan dengan tegangan rendah menghasilkan kutub S.
Setiap fase berubah menurut gelombang sinus, sehingga polaritas (kutub N, kutub S) dan medan magnet (gaya magnet) setiap kumparan akan berubah.
Pada saat ini, jika kita melihat kumparan yang menghasilkan kutub N, maka kumparan ini berubah secara berurutan dari kumparan fase U ke kumparan fase V ke kumparan fase W ke kumparan fase U, menyebabkan rotasi.
3. Struktur Motor Kecil
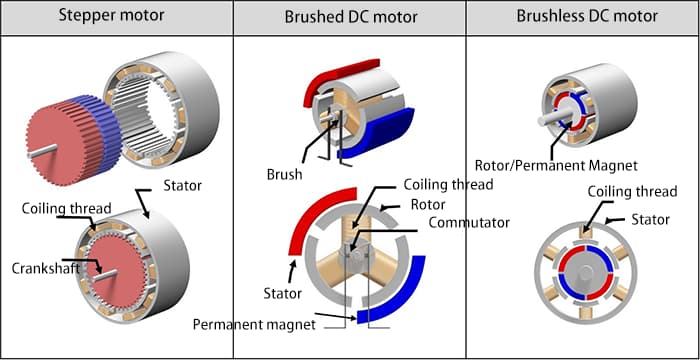
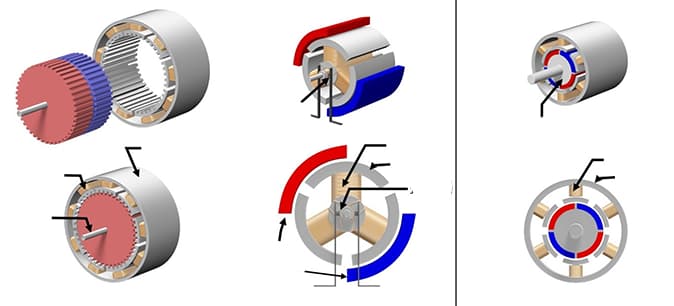
Gambar berikut ini menunjukkan perkiraan struktur dan perbandingan dari tiga jenis motor: motor stepping, motor DC yang disikat, dan motor DC tanpa sikat.
Komponen dasar motor ini terutama adalah kumparan, magnet, dan rotor, dan diklasifikasikan sebagai tipe kumparan-tetap dan tipe magnet-tetap karena jenisnya yang berbeda.
Berikut ini adalah penjelasan struktural yang terkait dengan contoh diagram. Karena mungkin ada struktur lain jika kita membaginya dengan lebih halus, harap dipahami bahwa artikel ini menjelaskan struktur secara keseluruhan.
Pada motor loncatan yang ditunjukkan di sini, koil dipasang pada sisi luar dan magnet berputar pada sisi dalam.
Pada motor DC yang disikat yang ditunjukkan di sini, magnet dipasang pada sisi luar dan kumparan berputar pada sisi dalam. Sikat dan komutator bertanggung jawab untuk memasok daya ke kumparan dan mengubah arah arus.
Pada motor tanpa sikat yang ditunjukkan di sini, kumparan dipasang di sisi luar dan magnet berputar di sisi dalam.
Karena jenis motor yang berbeda, meskipun komponen dasarnya sama, strukturnya mungkin berbeda. Penjelasan rinci akan diberikan di setiap bagian.
4. Motor Sikat
Struktur Motor Sikat
Di bawah ini adalah tampilan motor DC yang disikat yang sering digunakan dalam model, serta diagram ledakan motor dua kutub (2 magnet) dan tiga slot (3 kumparan). Banyak orang mungkin memiliki pengalaman membongkar motor dan melepas magnet.
Seperti yang dapat dilihat, magnet permanen motor DC yang disikat adalah tetap, dan kumparan dapat berputar di sekitar pusat internal motor. Sisi yang tetap disebut "stator", sedangkan sisi yang berputar disebut "rotor".
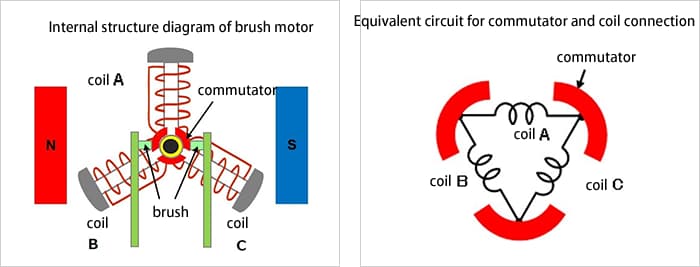
Berikut ini adalah diagram skematik yang merepresentasikan konsep struktur motor.
Terdapat tiga komutator (pelat logam melengkung untuk mengalihkan arus) pada pinggiran sumbu pusat yang berputar. Untuk mencegah komutator saling bersentuhan, komutator disusun pada interval 120 derajat (360 derajat ÷ 3). Komutator berputar bersama dengan rotasi sumbu.
Setiap komutator dihubungkan ke satu ujung kumparan dan ujung kumparan lainnya, dan tiga komutator dan tiga kumparan membentuk jaringan sirkuit secara keseluruhan (berbentuk cincin).
Dua sikat dipasang pada 0° dan 180° untuk menghubungi komutator. Catu daya DC eksternal dihubungkan ke sikat, dan arus mengalir di sepanjang jalur sikat → komutator → koil → sikat.
Prinsip pengoperasian motor yang disikat.
① Rotasi Berlawanan Arah Jarum Jam dari Kondisi Awal
Pada kondisi awal, Koil A berada di bagian atas, dan catu daya terhubung ke sikat dengan sisi kiri (+) dan kanan (-) yang ditentukan. Arus besar mengalir dari sikat kiri melalui komutator ke Koil A, dan sisi atas (luar) Koil A menjadi struktur kutub S.
Karena separuh arus yang mengalir melalui Kumparan A dari sikat kiri menuju Kumparan B dan C berlawanan arah dengan arus yang mengalir melalui Kumparan A, maka sisi luar Kumparan B dan C menjadi kutub N yang lebih lemah (diwakili oleh huruf yang lebih kecil dalam diagram).
Medan magnet yang dihasilkan dalam kumparan ini dan tolakan serta tarikan di antara magnet menyebabkan kumparan berputar berlawanan arah jarum jam.
② Rotasi Berlawanan Arah Jarum Jam Lebih Lanjut
Dengan mengasumsikan Coil A dalam keadaan rotasi berlawanan arah jarum jam sebesar 30 derajat, sikat kanan menyentuh dua komutator.
Arus dalam Coil A terus mengalir dari sikat kiri melalui sikat kanan, dan sisi luar Coil A tetap menjadi kutub S.
Arus yang sama seperti pada Koil A mengalir melalui Koil B, dan sisi luar Koil B menjadi kutub N yang lebih kuat.
Karena kedua ujung Coil C dihubung pendek oleh sikat, maka tidak ada arus yang mengalir, dan tidak ada medan magnet yang dihasilkan.
Bahkan dalam kasus ini, kumparan dikenai gaya rotasi berlawanan arah jarum jam.
Dari ③ ke ④, kumparan atas terus dikenai gaya ke kiri dan kumparan bawah terus dikenai gaya ke kanan, terus berputar berlawanan arah jarum jam.
Setiap kali kumparan berputar 30 derajat ke kondisi ③ dan ④, sisi luar kumparan menjadi kutub S apabila kumparan terletak di atas sumbu horizontal tengah, dan kutub N apabila kumparan terletak di bawahnya, dan berulang kali melakukan gerakan ini.
Dengan kata lain, kumparan atas berulang kali menerima gaya ke kiri, dan kumparan bawah berulang kali menerima gaya ke kanan (keduanya berlawanan arah jarum jam). Hal ini menyebabkan rotor terus berputar berlawanan arah jarum jam.
Jika catu daya dihubungkan ke sikat kiri (-) dan sikat kanan (+) yang berlawanan, koil menghasilkan medan magnet pada arah yang berlawanan, dan arah gaya yang diterapkan ke koil dibalik, menyebabkan rotasi searah jarum jam.
Selain itu, ketika catu daya terputus, rotor motor yang disikat berhenti berputar karena tidak ada medan magnet yang menjaganya tetap berputar.
5. Motor Tanpa Sikat Gelombang Penuh Tiga Fase
Penampilan dan Struktur Motor Sikat Gelombang Penuh Tiga Fase
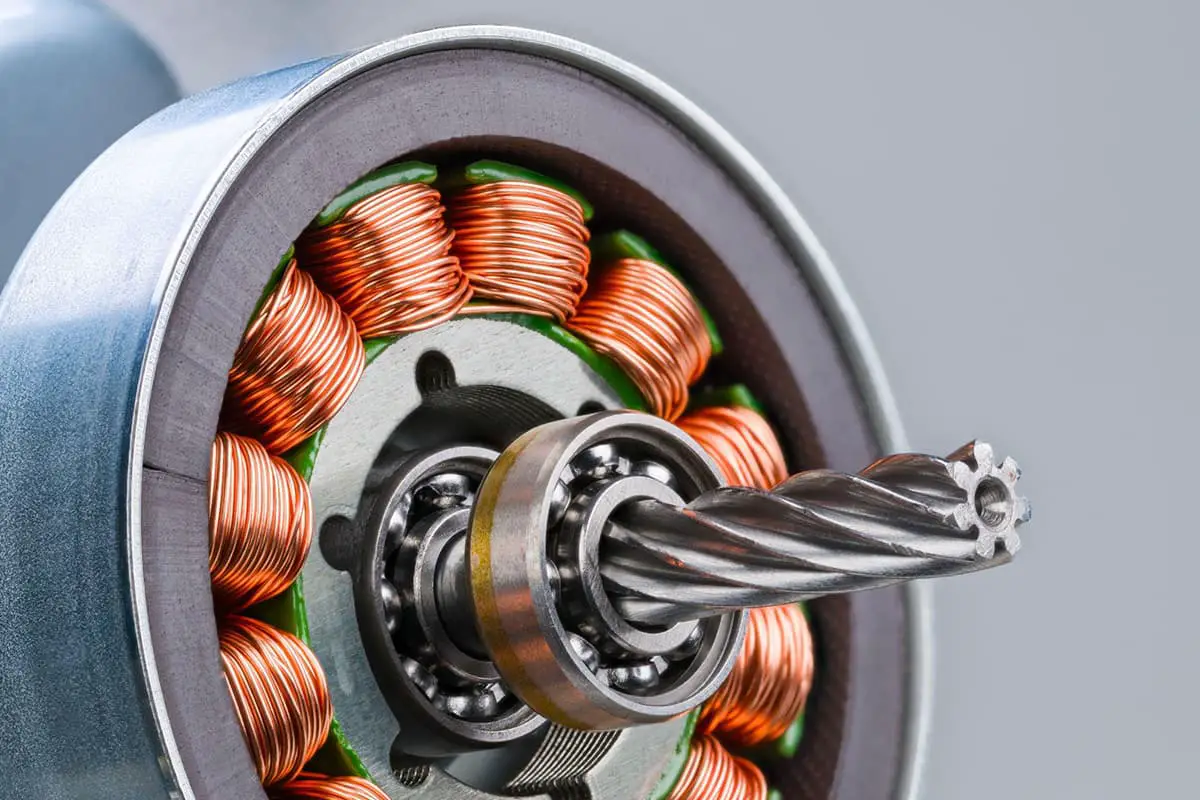
Gambar berikut ini menunjukkan contoh penampilan dan struktur motor tanpa sikat.
Di sebelah kiri adalah contoh motor spindel untuk memutar cakram dalam perangkat pemutaran cakram. Total ada sembilan kumparan, yang terdiri atas tiga fase dikalikan tiga.
Di sebelah kanan adalah contoh motor spindel untuk perangkat FDD, yang memiliki 12 kumparan (tiga fase dikalikan empat). Kumparan dipasang pada papan sirkuit dan dililitkan pada inti besi.
Komponen berbentuk cakram di sebelah kanan kumparan adalah rotor magnet permanen. Tepi luar terbuat dari magnet permanen, dan poros rotor dimasukkan ke dalam bagian tengah koil dan menutupi sebagiannya. Magnet permanen berputar di sekeliling tepi luar kumparan.
Diagram struktur internal motor brushless gelombang penuh tiga fase dan rangkaian ekuivalen untuk koneksi koil.
Berikut ini adalah diagram yang disederhanakan dari struktur internal dan rangkaian ekuivalen untuk koneksi koil.
Diagram yang disederhanakan menunjukkan motor 2 kutub (2 magnet) 3 slot (3 kumparan) dengan struktur sederhana. Ini mirip dengan sikat struktur motorik dengan jumlah kutub dan slot yang sama, tetapi sisi kumparannya tetap sementara magnetnya bisa berputar. Tentu saja, tidak ada kuas.
Dalam hal ini, kumparan dihubungkan dalam konfigurasi berbentuk Y, dan komponen semikonduktor digunakan untuk memasok arus ke kumparan. Aliran arus dikontrol berdasarkan posisi magnet yang berputar.
Dalam contoh ini, elemen Hall digunakan untuk mendeteksi posisi magnet. Elemen Hall ditempatkan di antara kumparan dan mendeteksi tegangan yang dihasilkan oleh kekuatan medan magnet, yang digunakan sebagai informasi posisi. Pada gambar motor spindel untuk perangkat FDD yang disediakan sebelumnya, elemen Hall juga dapat dilihat di antara kumparan untuk deteksi posisi (di atas kumparan).
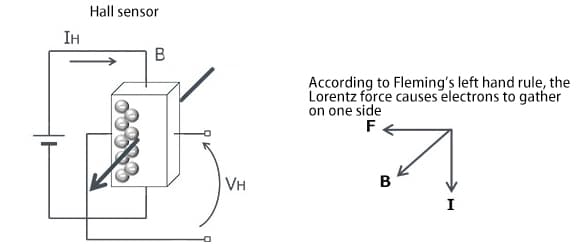
Elemen Hall adalah sensor magnetik terkenal yang mengubah ukuran medan magnet ke dalam ukuran tegangan, dan merepresentasikan arah medan magnet dengan tegangan positif atau negatif.
Berikut ini adalah diagram skematik yang mengilustrasikan efek Hall.
Elemen Hall memanfaatkan fenomena bahwa "ketika arus IH melewati semikonduktor dan fluks magnetik B melewati tegak lurus terhadap arus, tegangan VH dihasilkan dalam arah tegak lurus terhadap arus dan medan magnet." Fisikawan Amerika, Edwin Herbert Hall menemukan fenomena ini dan menamainya "efek Hall". Tegangan VH yang dihasilkan dinyatakan dengan rumus berikut ini:
VH = (KH / d) ・IH・B
KH: Koefisien Hall, d: ketebalan permukaan penetrasi fluks magnetik
Seperti ditunjukkan dalam rumus, semakin tinggi arusnya, semakin tinggi tegangannya. Karakteristik ini umumnya digunakan untuk mendeteksi posisi rotor (magnet).
Prinsip rotasi motor brushless gelombang penuh tiga fase
Prinsip rotasi motor brushless sekarang akan dijelaskan dalam langkah 1 hingga 6. Agar lebih mudah dipahami, magnet permanen telah disederhanakan dari bentuk lingkaran menjadi bentuk persegi panjang.
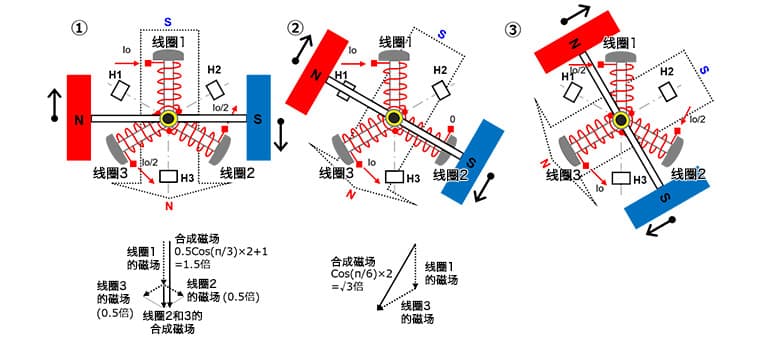
① Dalam sistem kumparan tiga fase, kumparan 1 dipasang pada posisi jam 12, kumparan 2 dipasang pada posisi jam 4, dan kumparan 3 dipasang pada posisi jam 8 pada permukaan jam. Magnet permanen 2 kutub dengan kutub N di sebelah kiri dan kutub S di sebelah kanan dapat berputar.
Alirkan arus Io melalui kumparan 1 untuk menghasilkan medan magnet kutub S di bagian luar kumparan. Alirkan arus Io/2 melalui kumparan 2 dan 3 untuk menghasilkan medan magnet kutub N di bagian luar kumparan.
Apabila medan magnet kumparan 2 dan 3 digabungkan secara vektor, maka akan dihasilkan medan magnet kutub N yang mengarah ke bawah. Medan magnet ini 0,5 kali medan magnet yang dihasilkan oleh arus Io yang melewati kumparan tunggal, dan apabila ditambahkan ke medan magnet kumparan 1, medan magnet ini menjadi 1,5 kali lebih kuat. Hal ini menghasilkan medan magnet gabungan yang tegak lurus terhadap magnet permanen, yang menghasilkan torsi maksimum dan menyebabkan magnet permanen berputar searah jarum jam.
Karena arus yang melalui kumparan 2 berkurang dan arus yang melalui kumparan 3 bertambah berdasarkan posisi rotasi, medan magnet gabungan juga berputar searah jarum jam, menyebabkan magnet permanen terus berputar.
② Dalam keadaan diputar 30 derajat, arus Io dilewatkan melalui koil 1, membuat arus di koil 2 nol dan menyebabkan arus Io mengalir keluar dari koil 3.
Bagian luar kumparan 1 menjadi kutub S dan bagian luar kumparan 3 menjadi kutub N. Apabila digabungkan secara vektor, medan magnet yang dihasilkan adalah √3 (≈1,72) kali lebih kuat daripada medan magnet yang dihasilkan oleh arus Io yang melewati kumparan tunggal. Hal ini juga menghasilkan medan magnet gabungan yang tegak lurus dengan magnet permanen, yang berputar searah jarum jam.
Saat posisi rotasi berubah, arus yang mengalir ke kumparan 1 berkurang, arus yang mengalir ke kumparan 2 mulai dari nol dan meningkat, dan arus yang mengalir keluar dari kumparan 3 meningkat ke Io. Akibatnya, medan magnet gabungan juga berputar searah jarum jam, menyebabkan magnet permanen terus berputar.
Dengan mengasumsikan bahwa setiap arus fasa adalah gelombang sinus, nilai arus di sini adalah Io × sin(π⁄3) = Io × √3⁄2. Melalui kombinasi vektor medan magnet, besaran medan magnet total adalah 1,5 kali medan magnet yang dihasilkan oleh kumparan tunggal.
Ketika setiap arus fasa adalah gelombang sinus, terlepas dari posisi magnet permanen, besarnya medan magnet gabungan vektor selalu 1,5 kali medan magnet yang dihasilkan oleh kumparan tunggal, dan medan magnet tegak lurus terhadap medan magnet magnet permanen pada sudut 90 derajat.
③ Dalam rotasi lanjutan 30 derajat, arus Io/2 mengalir melalui koil 1, arus Io/2 mengalir melalui koil 2, dan arus Io mengalir keluar dari koil 3.
Bagian luar kumparan 1 menjadi kutub S, bagian luar kumparan 2 juga menjadi kutub S, dan bagian luar kumparan 3 menjadi kutub N. Apabila digabungkan secara vektor, medan magnet yang dihasilkan adalah 1,5 kali medan magnet yang dihasilkan ketika arus Io melewati kumparan tunggal (sama seperti pada langkah 1). Hal ini juga menghasilkan medan magnet gabungan yang tegak lurus dengan medan magnet magnet permanen pada sudut 90 derajat dan berputar searah jarum jam.
④-⑥
Lanjutkan memutar dengan cara yang sama seperti langkah 1-3.
Dengan cara ini, jika arus yang mengalir ke dalam kumparan secara terus-menerus dialihkan berdasarkan posisi magnet permanen, maka magnet permanen akan berputar pada arah yang tetap. Demikian pula, jika arus dibuat mengalir pada arah yang berlawanan dan arah medan magnet gabungan dibalik, maka putarannya akan berlawanan arah jarum jam.
Diagram berikut ini menunjukkan arus yang mengalir melalui setiap koil untuk setiap langkah dari 1 hingga 6.
Melalui penjelasan di atas, hubungan antara perubahan saat ini dan rotasi sekarang harus dipahami.
6. Motor Stepper
Motor stepper adalah jenis motor yang dapat dikontrol secara tepat dalam hal sudut rotasi dan kecepatan dengan menyinkronkan dengan sinyal pulsa. Motor stepper juga dikenal sebagai "motor pulsa".
Karena kemampuannya untuk mencapai pemosisian yang akurat tanpa menggunakan sensor posisi dan hanya dengan kontrol loop terbuka, motor stepper banyak digunakan pada peralatan yang membutuhkan pemosisian.
Struktur Motor Stepper (Bipolar dua fase)
Gambar berikut ini dari kiri ke kanan menunjukkan contoh tampilan motor stepper, diagram skematik struktur internalnya, dan diagram konseptual strukturnya.
Dalam contoh penampilan, kedua jenis motor stepper HB (hibrida) dan PM (magnet permanen) ditampilkan. Diagram skematik di tengah juga menunjukkan struktur tipe HB dan PM.
Motor stepper memiliki struktur di mana kumparan tetap dan magnet permanen berputar. Diagram konseptual struktur internal motor stepper di sebelah kanan adalah contoh motor PM dengan kumparan dua fase (dua set).
Pada contoh struktur dasar motor stepper, kumparan disusun di bagian luar dan magnet permanen disusun di bagian dalam. Selain tipe dua fase, ada tipe dengan lebih banyak fase seperti tiga fase dan lima fase.
Beberapa motor stepper memiliki struktur yang berbeda, tetapi demi menjelaskan prinsip kerja dasar motor stepper, artikel ini menyajikan motor stepper dengan struktur dasar kumparan tetap dan magnet permanen yang berputar.
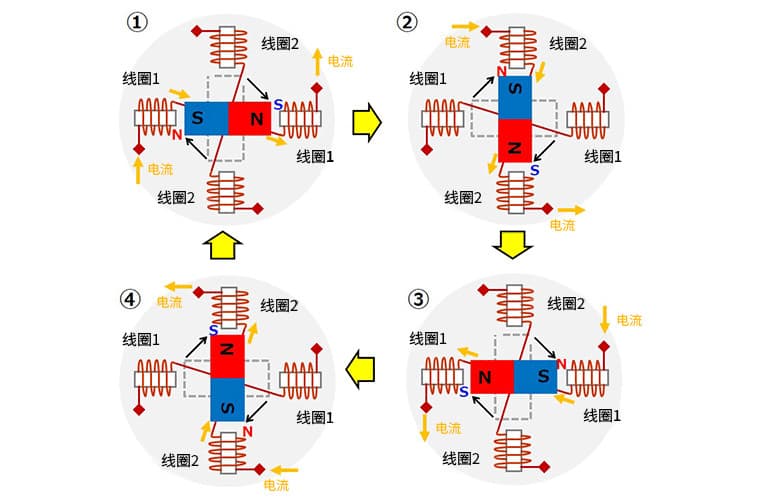
Diagram berikut ini digunakan untuk menjelaskan prinsip kerja dasar motor stepper. Ini adalah contoh eksitasi setiap fase (satu set kumparan) dari kumparan bipolar dua fase yang ditunjukkan pada gambar sebelumnya, dengan mengasumsikan perubahan status dari ① ke ④. Kumparan terdiri dari kumparan 1 dan 2, dan panah arus menunjukkan arah aliran arus.
①
Arus listrik mengalir dari sisi kiri koil 1 dan keluar dari sisi kanan.
Jangan biarkan arus listrik mengalir melalui koil 2.
Pada titik ini, bagian dalam kumparan kiri 1 menjadi Utara, dan bagian dalam kumparan kanan 1 menjadi Selatan.
Akibatnya, magnet permanen tengah tertarik oleh medan magnet koil 1 dan berhenti dalam keadaan di mana sisi kiri berada di Selatan dan sisi kanan berada di Utara.
②
Hentikan arus pada koil 1 dan biarkan arus mengalir dari bagian atas koil 2 dan keluar dari bagian bawah.
Bagian dalam kumparan atas 2 menjadi Utara, dan bagian dalam kumparan bawah 2 menjadi Selatan.
Magnet permanen tertarik oleh medan magnet dan berputar 90° searah jarum jam dan berhenti.
③
Hentikan arus pada koil 2 dan biarkan arus mengalir dari sisi kanan koil 1 dan keluar dari sisi kiri.
Bagian dalam kumparan kiri 1 menjadi Selatan, dan bagian dalam kumparan kanan 1 menjadi Utara.
Magnet permanen tertarik oleh medan magnetnya dan berputar 90° searah jarum jam dan berhenti.
④
Hentikan arus pada koil 1 dan biarkan arus mengalir dari bagian bawah koil 2 dan keluar dari bagian atas.
Bagian dalam kumparan atas 2 menjadi Selatan, dan bagian dalam kumparan bawah 2 menjadi Utara.
Magnet permanen tertarik oleh medan magnetnya dan berputar 90° searah jarum jam dan berhenti.
Dengan mengalihkan arus yang mengalir melalui kumparan dalam urutan langkah ① hingga ④ menggunakan sirkuit elektronik, motor stepper dapat diputar. Dalam contoh ini, setiap tindakan pengalihan akan memutar motor stepper sebesar 90°.
Selain itu, dengan terus mengalirkan arus melalui kumparan tertentu, motor stepper dapat mempertahankan posisi berhenti dan memiliki torsi penahan. Perlu disebutkan bahwa membalik urutan arus yang mengalir melalui kumparan dapat membuat motor stepper berputar ke arah yang berlawanan.
Sebagai pendiri MachineMFG, saya telah mendedikasikan lebih dari satu dekade karier saya untuk industri pengerjaan logam. Pengalaman saya yang luas telah memungkinkan saya untuk menjadi ahli di bidang fabrikasi lembaran logam, permesinan, teknik mesin, dan peralatan mesin untuk logam. Saya terus berpikir, membaca, dan menulis tentang subjek-subjek ini, terus berusaha untuk tetap menjadi yang terdepan di bidang saya. Biarkan pengetahuan dan keahlian saya menjadi aset bagi bisnis Anda.
Pernahkah Anda bertanya-tanya apa yang membuat motor listrik tetap berjalan dengan lancar tanpa mengalami panas berlebih? Memahami suhu pengoperasian yang aman untuk motor sangat penting untuk umur panjang dan kinerjanya. Dalam artikel ini,...
Dalam dunia otomasi industri yang serba cepat, motor servo adalah pahlawan tanpa tanda jasa yang mendorong presisi dan efisiensi. Tetapi dengan produsen yang tak terhitung jumlahnya berlomba-lomba untuk mendapatkan perhatian, bagaimana Anda tahu mana yang ...
Pernahkah Anda bertanya-tanya bagaimana ekskavator dan alat berat lainnya melakukan tugas-tugas beratnya? Dalam artikel ini, kita akan menjelajahi perbedaan yang menarik antara pompa hidrolik dan motor. Anda akan mempelajari bagaimana...
Pernahkah Anda bertanya-tanya bagaimana mesin mencapai gerakan yang presisi? Blog ini menyelami dunia mode kontrol motor servo yang menarik. Dari kontrol pulsa hingga analog, kita akan menjelajahi cara kerja setiap metode...
Pernahkah Anda bertanya-tanya bagaimana kereta api bisa melayang di atas rel atau bagaimana robot mencapai gerakan yang presisi? Artikel ini menyingkap dunia motor linear yang memukau, menjelaskan prinsip, jenis, dan keunggulan uniknya....
Pernahkah Anda bertanya-tanya bagaimana cara memilih motor yang sempurna untuk proyek Anda? Kuncinya terletak pada pemahaman tentang jenis-jenis motor-DC, asinkron, dan sinkron-dan keunggulan uniknya. Artikel ini menguraikan...
Mengapa bearing motor menjadi sangat panas, dan apa yang dapat dilakukan untuk mengatasinya? Artikel ini membahas penyebab timbulnya panas pada bearing motor, mulai dari beban yang berlebihan dan...
Apa yang terjadi bila keseimbangan magnet motor tidak seimbang? Tarikan magnet unilateral terjadi karena adanya celah udara yang tidak seimbang pada motor, sehingga menyebabkan gaya yang tidak merata yang membebani bantalan motor. Artikel ini...
Bagaimana bearing memengaruhi efisiensi dan daya tahan motor roda gigi heliks? Artikel ini membahas peran penting bearing, membahas pemilihan dan pengaturannya, dan bagaimana mereka menangani...