Sistem kontrol hidraulik terdiri dari komponen hidraulik yang canggih dan transduser presisi. Elemen-elemen utama meliputi katup kontrol arah, katup kontrol tekanan, katup kontrol aliran, pompa hidraulik (seperti pompa roda gigi, baling-baling, dan piston), aktuator (silinder dan motor), akumulator, dan peralatan pengkondisian fluida.
Teknologi kontrol hidraulik adalah landasan sistem kontrol otomatis modern, yang dibedakan oleh karakteristik uniknya berupa kepadatan daya yang tinggi, respons yang cepat, dan pengoperasian yang mulus. Manfaatnya yang menonjol termasuk kemampuan untuk menghasilkan gaya dan torsi besar dalam paket yang ringkas, perlindungan beban berlebih yang sangat baik, dan kemampuan kontrol gerakan yang presisi.
Teknologi ini mencontohkan sinergi antara sistem tenaga elektromekanis dan tenaga fluida, seperti yang dibuktikan dalam sistem servo elektrohidraulik yang canggih. Sistem ini menggunakan kontrol loop tertutup dengan respons dinamis dan mekanisme umpan balik negatif untuk mencapai pemosisian presisi tinggi dan kontrol gaya. Integrasi subsistem mekanis, elektrik, dan hidraulik menciptakan sistem dinamis serbaguna dan kuat yang mampu memenuhi persyaratan industri yang menuntut.
Adopsi teknologi kontrol hidraulik yang meluas menjangkau berbagai industri, masing-masing memanfaatkan keunggulan spesifiknya:
- Manufaktur Peralatan: Menyediakan aktuasi gaya tinggi untuk mesin cetak, mesin cetak injeksi, dan peralatan penanganan material.
- Otomotif: Mengaktifkan power steering, sistem pengereman, dan sistem suspensi aktif.
- Kedirgantaraan: Sangat penting untuk permukaan kontrol penerbangan, roda pendaratan, dan pembalik daya dorong.
- Pertahanan: Digunakan dalam sistem persenjataan, suspensi kendaraan lapis baja, dan stabilisator kapal angkatan laut.
- Metalurgi: Mengoperasikan pabrik penggulungan, mesin penempaan, dan mesin pengecoran kontinu.
- Kelautan: Penting untuk perlengkapan kemudi, derek, dan peralatan pengeboran lepas pantai.
- Teknik Medis: Menggerakkan instrumen presisi dan sistem pemosisian pasien.
Kontrol hidraulik loop terbuka dan kontrol hidraulik loop tertutup
Sama seperti sistem kontrol elektromekanis, sistem kontrol hidraulik dapat dibagi menjadi kontrol loop terbuka dan loop tertutup.
Untuk mengilustrasikan perbedaan di antara keduanya, kita akan menggunakan kontrol gerakan balok alat berat sebagai contoh.
Balok gerakan alat mesin adalah objek kontrol yang umum dan berfungsi sebagai bodi meja kerja alat mesin. Balok ini dipasang pada pemandu geser bodi alat mesin.
Peralatan mesin yang berbeda memiliki persyaratan kinerja yang berbeda-beda untuk balok gerakan. Sebagai contoh, balok gerak penggiling permukaan hanya memerlukan gerakan bolak-balik horizontal yang stabil dan tidak memerlukan kontrol yang tepat untuk perpindahannya.
Di sisi lain, pusat pemesinan NC atau sinar gerak mesin milling CNC digunakan untuk gerakan pengumpanan yang presisi, dan perpindahan gerakannya harus dikontrol secara tepat untuk memastikan kualitas pemesinan yang tepat.
Dalam kasus elektro-hidrolik tekan remSelain itu, jarak pergerakan ram juga memerlukan akurasi tinggi untuk mempertahankan sudut tekukan yang konsisten dan menghindari efek tekukan yang berkurang.
Untuk lebih memahami perbedaan antara kontrol hidraulik loop terbuka dan loop tertutup, kami akan menggunakan balok gerakan alat mesin sebagai objek yang dikontrol dan membangun tiga sistem kontrol hidraulik yang umum menggunakan katup arah elektromagnetik, katup arah proporsional elektromagnetik, dan katup servo elektro-hidraulik sebagai komponen kontrol utama.
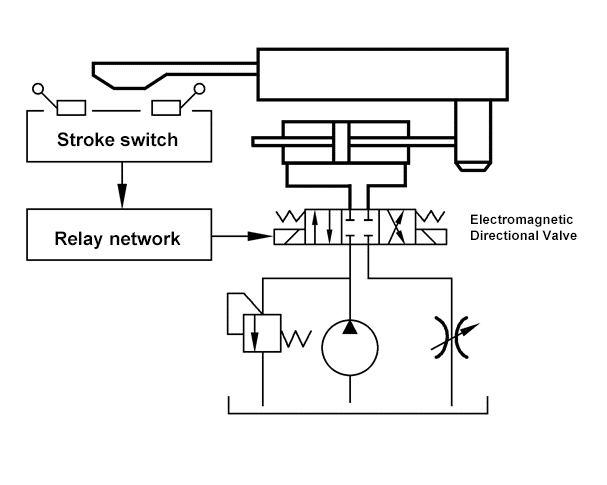
1.1 Sistem kontrol hidraulik yang dibangun dengan katup arah elektromagnetik.
Skema kontrol hidraulik dapat digunakan untuk meja kerja bolak-balik horisontal pada mesin gerinda permukaan yang umum, seperti yang ditunjukkan pada Gambar 1.1.
Sistem kontrol hidraulik ini menggunakan katup arah elektromagnetik.
Katup pengarah elektromagnetik empat arah tiga posisi berfungsi sebagai unit kontrol, dan sakelar perjalanan atau sakelar kedekatan memberikan instruksi. Relai listrik membentuk jaringan komputasi logis.
Pengaturan ini memungkinkan operasi logika sinyal kontrol dan penguatan daya, menghasilkan elektromagnet yang cukup untuk mengontrol katup arah elektromagnetik.
Inti katup dari katup arah elektromagnetik memiliki tiga posisi: kiri, tengah, dan kanan, dan dapat mengontrol pemutus sirkuit dan sakelar oli.
Setiap port katup hanya memiliki dua status, terbuka penuh dan tertutup penuh, yang mengklasifikasikan katup arah elektromagnetik sebagai katup sakelar hidraulik elektromagnetik.
Katup pengarah elektromagnetik hanya dapat memulai dan menghentikan operasi sirkuit oli untuk mengontrol sinar gerakan, tetapi tidak dapat menyesuaikan kecepatan sinar yang bergerak.
Untuk mengatur kecepatan sinar yang bergerak, katup throttle dipasang dalam sistem kontrol hidraulik untuk melakukan kontrol throttle.
Dengan menyesuaikan bukaan katup, perbedaan tekanan throttle dapat diatur, yang mengubah aliran oli kembali ke tangki dan secara tidak langsung menyesuaikan aliran masuk dan keluar oli hidraulik ke silinder hidraulik, yang pada akhirnya mengubah kecepatan sinar.
Gbr. 1.1 Diagram untuk mengadopsi katup arah elektromagnetik ke sistem kontrol
Kecepatan gerakan balok hanya dapat dikontrol oleh katup throttle dan tidak dapat dikontrol oleh kontrol listrik. Hal ini mengakibatkan perubahan kecepatan yang tiba-tiba dan getaran yang signifikan pada sinar.
Prinsip sistem kontrol hidraulik yang menggunakan katup arah elektromagnetik ditunjukkan pada Gambar 1.2.
Sinyal kontrol dihasilkan oleh travel switch dan merupakan unit kontrol logika (0 atau 1).
Jaringan relai melakukan operasi logika pada sinyal kontrol dan memperkuat catu daya ke elektromagnet yang sesuai, menyebabkan inti katup yang sesuai bergerak.
Hal ini mengakibatkan tiga posisi inti katup berubah dari kiri ke kanan dan menghasilkan aliran kontrol hidraulik, yang menggerakkan silinder hidraulik dan menggerakkan balok gerakan alat berat.
Gbr.1.2 Diagram untuk mengadopsi sistem kontrol katup arah elektromagnetik
Sistem kontrol hidraulik yang terdiri dari katup pengarah elektromagnetik dan relay hanya dapat menghasilkan instruksi kontrol sederhana.
Sinyal kontrol bersifat searah dan hanya mengalir ke arah depan objek yang dikontrol.
Sistem kontrol ini adalah sistem kontrol loop terbuka.
Waktu respons instruksi kontrol ke objek yang dikontrol bergantung pada waktu respons masing-masing komponen dalam jalur transmisi sinyal.
Namun demikian, karena sinyal instruksi kontrol sederhana, tidak ada masalah dengan sistem kontrol yang tidak melacak sinyal instruksi output.
Jika suatu komponen terganggu dan menghasilkan gerakan yang salah, sistem tidak dapat secara otomatis mengoreksi atau mengkompensasi kesalahan tersebut.
1.2 Sistem kontrol hidraulik yang dibangun dengan katup solenoid proporsional.
Katup arah elektromagnetik proporsional adalah jenis katup hidraulik elektromagnetik berkinerja tinggi dan berharga tinggi.
Untuk kontrol gerakan balok yang membutuhkan kinerja lebih tinggi, seperti mesin gerinda permukaan kontrol numerik (di mana kontrol perpindahan meja kerja yang tepat tidak diperlukan), katup solenoida proporsional dapat digunakan sebagai unit kontrol untuk membentuk sistem kontrol hidraulik berdampak rendah dan bergetaran rendah, seperti yang ditunjukkan pada Gambar 1.3.
Gbr.1.3 Diagram untuk mengadopsi katup arah elektromagnetik proporsional untuk sistem kontrol.
Katup hidraulik proporsional menggunakan sinyal listrik untuk mengontrol inti katup untuk gerakan bertahap.
Oleh karena itu, untuk mengontrol perubahan bertahap dalam pembukaan katup, penurunan tekanan dan laju aliran katup hidraulik proporsional dapat disesuaikan, mengubah rasio antara aliran dan sinyal kontrol.
Pengontrol program menghasilkan sinyal listrik untuk mengontrol sinar yang bergerak, memungkinkan perubahan bertahap dalam sinyal listrik untuk mengontrol dan menyesuaikan kecepatan gerakan sinar. Hal ini menghasilkan perubahan yang mulus dalam kecepatan dan arah pergerakan sinar dengan dampak minimal.
Prinsip sistem kontrol hidraulik yang menggunakan katup pengarah elektromagnetik proporsional ditunjukkan pada Gambar 1.4.
Sinyal kontrol dihasilkan oleh pengontrol program dan merupakan sinyal kontrol analog (sinyal listrik kontinu) yang diperkuat oleh penguat proporsional untuk mengontrol elektromagnet proporsional yang sesuai dari katup solenoid proporsional.
Hal ini menghasilkan perpindahan yang dapat disesuaikan secara terus menerus dan tekanan hidraulik yang terus berubah untuk mengontrol aliran oli dan menggerakkan silinder oli, sehingga mewujudkan pergerakan balok alat mesin.
Dalam sistem kontrol hidraulik yang menggunakan katup arah elektromagnetik proporsional, meskipun pengontrol derajat dapat digunakan untuk mengeluarkan sinyal perintah kontrol gradien kontinu, sinyal kontrol bersifat searah dan hanya mengalir ke arah depan objek yang dikontrol. Ini adalah sistem kontrol loop terbuka.
Sistem perintah dapat mengirim sinyal gradien kontinu, dan output sistem dapat melacak sinyal perintah, tetapi akurasi pelacakan rendah, dan kecepatan respons lambat dan tergantung pada waktu respons komponen transmisi sinyal.
Kesalahan yang disebabkan oleh gangguan tidak dapat dikompensasi secara otomatis.
Gbr.1.4 Diagram untuk mengadopsi katup arah elektromagnetik proporsional untuk sistem kontrol.
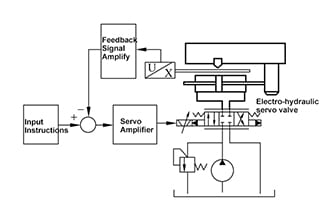
1.3 Sistem kontrol hidraulik yang dibangun oleh katup servo elektro-hidraulik.
Pergerakan meja kerja pusat pemesinan NC merupakan bagian penting dari proses pemesinan, yang memerlukan presisi tinggi dan kecepatan respons yang cepat.
Dalam hal ini, elektro-hidrolik kontrol servo dapat digunakan, dengan katup servo elektro-hidrolik yang berfungsi sebagai unit kontrol.
Katup servo elektro-hidrolik adalah unit kontrol hidraulik berkinerja tinggi dengan kontrol yang presisi dan kecepatan respons yang cepat, tetapi harganya mahal.
Katup servo elektro-hidrolik sering digunakan dalam sistem kontrol loop tertutup elektro-hidrolik, di mana objek yang dikontrol untuk sementara waktu dapat digerakkan oleh mode kontrol loop terbuka.
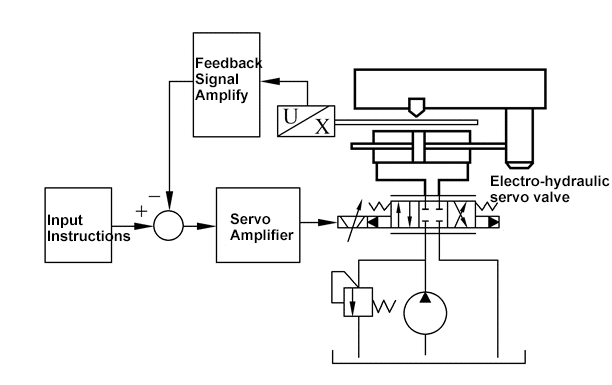
Sistem kontrol hidraulik untuk balok gerakan alat mesin menggunakan katup servo elektro-hidraulik ditunjukkan pada Gambar 1.5.
Alat mesin dilengkapi dengan sensor perpindahan, yang mendeteksi posisi sinar yang bergerak, menghasilkan sinyal tegangan posisi, dan memasukkan sinyal ke dalam perangkat kontrol elektronik setelah penguatan.
Gbr.1.5 Diagram untuk mengadopsi katup servo elektro-hidrolik ke sistem kontrol.
Perangkat kontrol membandingkan sinyal tegangan posisi sinar alat mesin saat ini dengan sinyal tegangan instruksi kontrol untuk menghasilkan sinyal tegangan deviasi.
Sinyal deviasi adalah tegangan analog kontinu yang secara akurat dan dalam waktu nyata mencerminkan perbedaan antara posisi sinar alat mesin dan instruksi kontrol (posisi sinar yang diinginkan).
Sinyal deviasi diperkuat oleh penguat proporsional, yang mengendalikan perpindahan motor torsi dalam katup servo elektro-hidrolik dan inti katup kontrol presisi tinggi dan dinamis.
Hal ini menghasilkan aliran dan tekanan hidraulik yang diperlukan untuk menggerakkan gerakan silinder hidraulik dan menggerakkan balok alat berat.
Pergerakan sinar dideteksi oleh sensor perpindahan dan dikirim ke perangkat kontrol elektronik, membentuk sinyal kontrol loop tertutup. Sistem kontrol ini disebut sebagai kontrol loop tertutup.
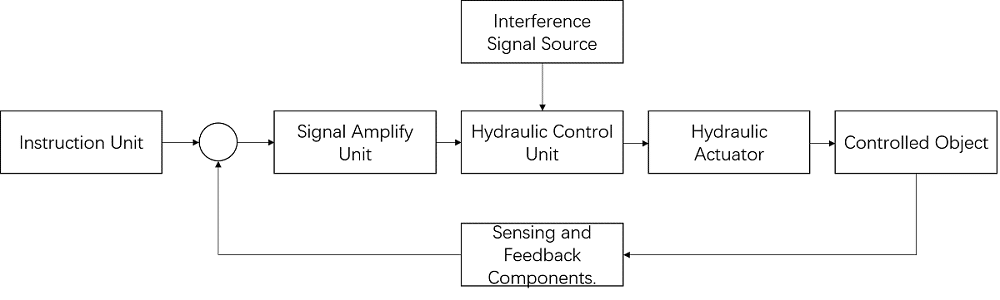
Proses kontrol yang dijelaskan di atas ditunjukkan pada Gambar 1.6.
Sistem ini merupakan struktur kontrol loop tertutup.
Dalam sistem kontrol hidraulik loop tertutup, tidak hanya terdapat efek kontrol maju dari pengontrol pada objek yang dikontrol, tetapi juga efek umpan balik dari objek yang dikontrol ke pengontrol.
Sistem kontrol loop tertutup memiliki presisi tinggi, respons dinamis yang cepat, dan kompensasi otomatis untuk gangguan eksternal.
Gbr.1.6 Diagram untuk mengadopsi katup servo elektro-hidrolik ke sistem kontrol.
1.4 Kontrol loop terbuka vs kontrol loop tertutup
Kontrol hidraulik loop terbuka dan kontrol hidraulik loop tertutup adalah dua jenis metode kontrol dasar kontrol hidraulik.
1. Kontrol Hidraulik Loop Terbuka
Sistem kontrol hidraulik loop terbuka, yang menggunakan katup hidraulik konvensional dan proporsional, memiliki kesamaan teknis yang signifikan dengan sistem transmisi hidraulik. Tumpang tindih ini meluas ke penggunaan komponen hidraulik dan konfigurasi sirkuit yang serupa, memanfaatkan prinsip-prinsip desain yang sudah mapan dan keahlian industri.
Performa sistem dalam kontrol hidraulik loop terbuka sebagian besar ditentukan oleh performa individual dan kolektif komponen hidrauliknya. Akurasi keseluruhan adalah fungsi dari presisi kumulatif setiap komponen, sedangkan karakteristik respons sistem berkorelasi langsung dengan waktu respons komponen penyusunnya.
Keterbatasan utama kontrol hidraulik loop terbuka adalah ketidakmampuannya untuk menyesuaikan atau mengimbangi variasi output yang dihasilkan dari gangguan eksternal atau fluktuasi parameter internal. Karakteristik yang melekat ini memerlukan pertimbangan yang cermat selama desain sistem dan pemilihan aplikasi.
Dari perspektif desain, sistem kontrol hidraulik loop terbuka menawarkan keuntungan dalam hal kesederhanaan struktural dan persyaratan stabilitas. Penyederhanaan ini memfasilitasi analisis sistem, proses desain, dan prosedur pemasangan yang lebih mudah. Selain itu, pendekatan desain dapat memanfaatkan basis pengetahuan yang luas dan data empiris yang berasal dari rekayasa sistem transmisi hidraulik.
Perbedaan utama antara kontrol hidraulik loop terbuka dan sistem transmisi hidraulik terletak pada fokus aplikasinya. Sistem loop terbuka biasanya digunakan dalam skenario di mana kontrol presisi tinggi tidak penting, gangguan eksternal minimal, variasi parameter internal terbatas, dan waktu respons yang lebih lambat dapat diterima.
Pada dasarnya, kontrol hidraulik loop terbuka mewakili metodologi kontrol non-feedback yang mendasar. Pengontrol memberikan pengaruh searah pada objek yang dikontrol, tanpa umpan balik timbal balik. Akibatnya, kesalahan yang disebabkan oleh gangguan eksternal atau variasi sistem tidak dapat dikompensasi secara otomatis di dalam loop kontrol.
Mengingat keterbatasan yang melekat dalam akurasi dan kecepatan respons, sistem kontrol loop terbuka umumnya tidak menjamin penggunaan katup servo berkinerja tinggi. Katup ini, yang dicirikan oleh persyaratan operasional yang ketat dan struktur biaya premium, biasanya dicadangkan untuk aplikasi loop tertutup yang lebih menuntut di mana karakteristik kinerja superiornya dapat dimanfaatkan sepenuhnya.
Kesimpulannya, meskipun sistem kontrol hidraulik loop terbuka menawarkan kesederhanaan dan efektivitas biaya untuk aplikasi tertentu, penggunaannya harus dievaluasi secara cermat terhadap persyaratan spesifik dari aplikasi yang dimaksudkan, terutama dalam hal presisi, waktu respons, dan kemampuan penolakan gangguan.
2. Kontrol hidraulik loop tertutup
Sistem kontrol hidraulik loop tertutup biasanya menggunakan katup servo elektro-hidraulik atau katup penggerak langsung (DDV) sebagai elemen kontrol utamanya. Komponen berkinerja tinggi ini menggabungkan mekanisme umpan balik loop tertutup terintegrasi, memungkinkan presisi yang luar biasa dan karakteristik respons yang cepat.
Sering disebut sebagai sistem kontrol umpan balik hidraulik, konfigurasi ini beroperasi berdasarkan prinsip dasar umpan balik kontinu. Konsep intinya melibatkan pemanfaatan deviasi untuk meminimalkan atau menghilangkan ketidaksesuaian dalam kinerja sistem.
Fungsionalitas sistem berkisar pada proses perbandingan. Unit umpan balik memonitor keadaan objek yang dikontrol, menyampaikan informasi ini untuk dibandingkan dengan parameter kontrol unit instruksi sistem. Perbandingan ini menghasilkan sinyal deviasi, yang kemudian diperkuat dan digunakan untuk menggerakkan katup kontrol hidraulik berdaya tinggi. Katup ini, pada gilirannya, mengatur aktuator hidraulik dan, pada akhirnya, objek yang dikendalikan.
Dengan membentuk loop tertutup, sistem ini menawarkan akurasi kontrol yang unggul dan kemampuan anti-interferensi yang kuat dibandingkan dengan konfigurasi loop terbuka. Namun, peningkatan performa ini harus dibayar dengan peningkatan kompleksitas dalam proses analisis, desain, dan commissioning.
Keuntungan utama dari kontrol loop tertutup adalah kemampuannya untuk mencapai presisi tinggi dan sifat anti-interferensi yang kuat bahkan ketika menggunakan komponen hidraulik dengan presisi inheren yang relatif lebih rendah atau resistensi gangguan yang lebih lemah. Hal ini memungkinkan optimalisasi sistem hidraulik yang ada melalui penerapan kontrol loop tertutup, yang menghasilkan peningkatan kinerja sistem secara keseluruhan dan efektivitas kontrol.
Pendekatan loop tertutup menawarkan beberapa manfaat berbeda yang tidak dapat dicapai melalui metode kontrol loop terbuka:
- Koreksi kesalahan dinamis: Penyesuaian waktu nyata berdasarkan umpan balik meminimalkan kesalahan kondisi tunak.
- Stabilitas yang lebih baik: Sistem dapat mempertahankan output yang diinginkan meskipun ada gangguan eksternal atau variasi internal.
- Mengurangi sensitivitas terhadap perubahan parameter: Sistem loop tertutup tidak terlalu terpengaruh oleh keausan komponen atau fluktuasi lingkungan.
- Kemampuan beradaptasi: Sistem dapat secara otomatis mengimbangi ketidaklinieran dan ketidakpastian dalam komponen hidraulik.
Dalam aplikasi industri, sistem kontrol hidraulik loop tertutup banyak digunakan dalam manufaktur presisi, robotika, dirgantara, dan alat berat yang memerlukan kontrol posisi, gaya, atau kecepatan yang akurat.