Kasus Satu
Diberikan:
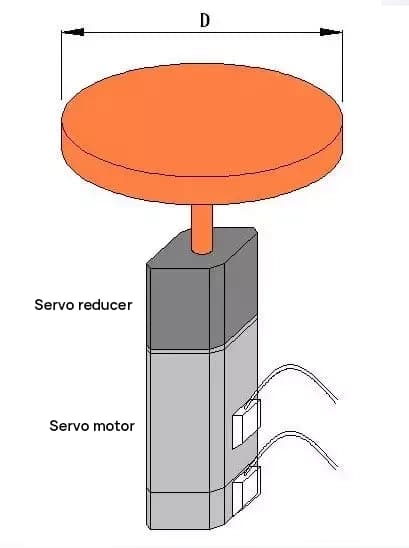
- Massa cakram M = 50 kg
- Diameter cakram D = 500 mm
- Kecepatan cakram maksimum 60 rpm
Pilih motor servo dan roda gigi reduksi, skema komponen sebagai berikut:
Menghitung momen inersia untuk rotasi cakram
JL = MD2/8 = 50 * 502 / 8 = 15625 [kg-cm2]
Dengan asumsi rasio reduksi roda gigi 1: R, inersia beban yang dipantulkan pada poros motor servo adalah 15625 / R2.
Menurut prinsip bahwa inersia beban harus kurang dari tiga kali inersia rotor JM dari motor,
jika motor 400W dipilih, JM = 0,277 [kg-cm2],
lalu: 15625 / R2 < 3*0.277, R2 > 18803, R > 137,
kecepatan output = 3000/137 = 22 [rpm],
yang tidak memenuhi persyaratan.
Jika motor 500W dipilih, JM = 8,17 [kg-cm2],
lalu: 15625 / R2 < 3*8.17, R2 > 637, R > 25,
kecepatan output = 2000/25 = 80 [rpm],
yang memenuhi persyaratan.
Jenis transmisi ini memiliki resistansi minimal, sehingga perhitungan torsi diabaikan.
Kasus Dua
Diberikan:
- Berat beban M = 50 kg
- Sabuk sinkron diameter roda D = 120 mm
- Rasio pengurangan R1 = 10, R2 = 2
- Koefisien gesekan antara beban dan meja mesin µ = 0,6
- Kecepatan gerak maksimum beban: 30 m/menit
- Waktu untuk beban berakselerasi dari keadaan diam ke kecepatan maksimum: 200ms
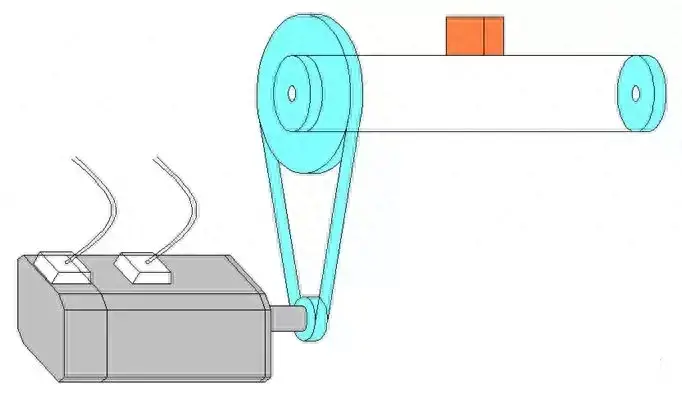
Mengabaikan berat setiap roda ban berjalan,
Berapa kebutuhan daya minimum motor untuk menggerakkan beban seperti itu?
Diagram skematik komponen adalah sebagai berikut:
1. Menghitung inersia beban yang dipantulkan pada poros motor:
JL = M * D2 / 4 / R12
= 50 * 144 / 4 / 100
= 18 [kg-cm2]
Menurut prinsip bahwa inersia beban harus kurang dari tiga kali inersia rotor motor (JM):
JM > 6 [kg-cm2]
2. Menghitung torsi yang diperlukan untuk menggerakkan beban motor:
Torsi yang diperlukan untuk mengatasi gesekan:
Tf = M * g * µ * (D / 2) / R2 / R1
= 50 * 9.8 * 0.6 * 0.06 / 2 / 10
= 0,882 [N-m]
Torsi yang diperlukan untuk akselerasi:
Ta = M * a * (D / 2) / R2 / R1
= 50 * (30 / 60 / 0.2) * 0.06 / 2 / 10
= 0,375 [N-m]
Torsi pengenal motor servo harus lebih besar dari Tfdan torsi maksimum harus lebih besar dari Tf + Ta.
3. Menghitung kecepatan motor yang diperlukan:
N = v / (πD) * R1
= 30 / (3.14 * 0.12) * 10
= 796 [rpm]
Kasus Tiga
Diberikan:
- Berat beban M = 200 kg
- Pitch sekrup PB = 20 mm
- Diameter sekrup DB = 50 mm
- Berat sekrup MB = 40 kg
- Koefisien gesekan µ = 0,2
- Efisiensi mekanis η = 0,9
- Kecepatan gerakan beban V = 30 m/menit
- Total waktu pergerakan t = 1,4 detik
- Waktu akselerasi dan deselerasi t1 = t3 = 0.2 s
- Waktu istirahat t4 = 0.3 s
Pilih motor servo dengan daya minimum yang memenuhi persyaratan beban,
Diagram komponennya adalah sebagai berikut:
1. Perhitungan Inersia Beban yang Dikonversi ke Poros Motor
Inersia beban dari berat yang dikonversi ke poros motor
JW = M * (PB / 2π)²
= 200 * (2 / 6.28)²
= 20,29 [kg-cm²]
Kelambanan rotasi sekrup
JB = MB * DB² / 8
= 40 * 25 / 8
= 125 [kg-cm²]
Inersia beban total
JL = JW + JB = 145,29 [kg-cm²]
2. Perhitungan Kecepatan Motor
Kecepatan motor yang diperlukan
N = V / PB
= 30 / 0.02
= 1500 [rpm]
3. Perhitungan Torsi yang Dibutuhkan untuk Menggerakkan Beban Motor
Torsi yang diperlukan untuk mengatasi gesekan
Tf = M * g * µ * PB / 2π / η
= 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9
= 1,387 [N-m]
Torsi yang dibutuhkan saat beban bertambah cepat
TA1 = M * a * PB / 2π / η
= 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9
= 1,769 [N-m]
Torsi yang diperlukan saat sekrup berakselerasi
TA2 = JB * α / η
= JB * (N * 2π / 60 / t1) / η
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9
= 10,903 [N-m]
Torsi total yang diperlukan untuk akselerasi
TA = TA1 + TA2 = 12,672 [N-m]
4. Pemilihan Motor Servo
Nilai torsi motor servo
T > Tf dan T > Trms
Torsi maksimum motor servo
Tmaks > Tf + TA
Akhirnya, motor ECMA-E31820ES yang dipilih.