Motor Stepper
Prinsip kerja motor loncatan
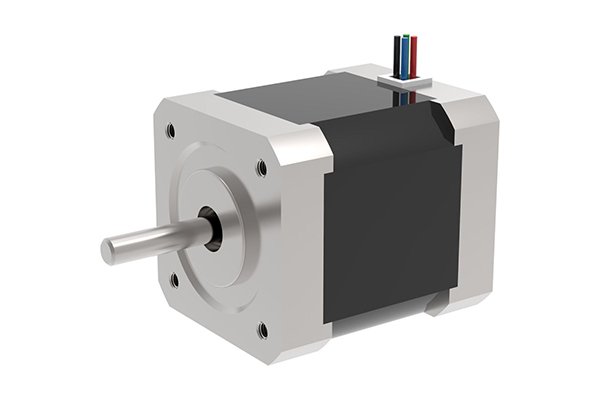
Sebuah motor stepper, sebuah jenis motor yang dirancang khusus untuk kontrol, mengubah pulsa listrik menjadi perpindahan sudut.
Ketika driver stepper menerima sinyal pulsa, ini menyebabkan motor stepper berputar pada sudut tetap yang telah ditentukan sebelumnya, yang dikenal sebagai "sudut langkah", ke arah yang ditentukan.
Motor berputar selangkah demi selangkah pada sudut langkah tetap.
Pemosisian yang akurat dapat dicapai dengan mengontrol jumlah pulsa, dan mengatur kecepatan serta akselerasi putaran motor dapat dilakukan dengan mengontrol frekuensi pulsa.
Membalikkan arah putaran motor dapat dicapai dengan mengubah urutan pemberian energi pada belitan.
Prinsip kerja driver motor stepper
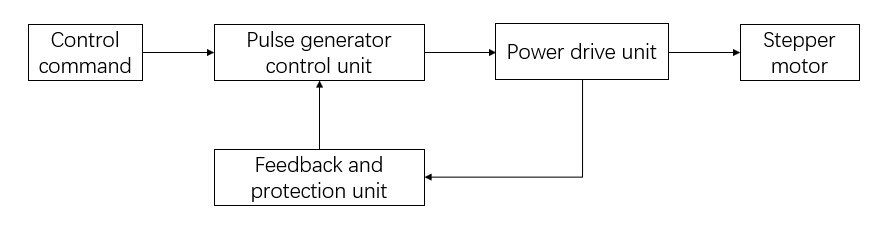
Motor stepper memerlukan driver motor stepper khusus untuk beroperasi. Pengemudi ini terdiri dari unit kontrol impuls, unit penggerak daya, dan unit perlindungan.
Unit penggerak daya memperkuat pulsa yang dihasilkan oleh unit kontrol impuls dan secara langsung terhubung ke motor stepper, yang berfungsi sebagai antarmuka daya antara motor stepper dan mikrokontroler.
Unit instruksi kontrol menerima sinyal pulsa dan arah serta menghasilkan serangkaian pulsa yang sesuai, yang kemudian ditransmisikan ke motor stepper melalui unit penggerak daya.
Motor stepper kemudian memutar sudut langkah yang ditetapkan ke arah yang ditunjukkan.
Motor stepper memiliki beberapa spesifikasi teknis utama, seperti torsi statis maksimum, frekuensi awaldan frekuensi pengoperasian.
Umumnya, semakin kecil sudut langkah, semakin besar torsi statis maksimum, dan semakin tinggi frekuensi start dan operasi.
Oleh karena itu, mode operasi sangat menekankan pada teknologi drive subdivisi.
Metode ini meningkatkan torsi dan resolusi motor stepper dan sepenuhnya menghilangkan osilasi frekuensi rendah.
Hasilnya, performa drive subdivisi lebih unggul daripada jenis drive lainnya.
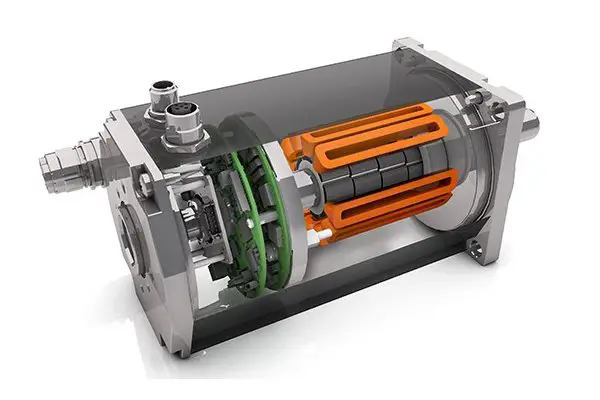
Rotor di dalam motor servo adalah magnet permanen. Pengemudi mengontrol listrik tiga fase U/V/W untuk menciptakan medan elektromagnetik, menyebabkan rotor berputar di bawah pengaruh medan magnet ini. Encoder motor sendiri memberikan sinyal umpan balik kepada pengemudi, yang menyesuaikan sudut rotasi rotor berdasarkan nilai umpan balik dan nilai target.
Motor Servo
Prinsip kerja motor servo
Motor servo, juga disebut sebagai motor eksekutif, digunakan sebagai aktuator dalam sistem kontrol otomatis untuk mengubah sinyal listrik yang diterima menjadi perpindahan sudut atau kecepatan sudut pada poros motor.
Motor servo tersedia dalam dua jenis: DC dan AC.
Ketika motor servo menerima pulsa, motor servo memutar sudut yang sesuai untuk menghasilkan perpindahan. Ini karena motor servo itu sendiri memancarkan pulsa, dengan setiap sudut rotasi memancarkan sejumlah pulsa yang sesuai yang membentuk loop tertutup dengan pulsa yang diterima oleh motor servo.
Hal ini memungkinkan sistem untuk memonitor jumlah pulsa yang dikirim ke motor servo dan jumlah pulsa yang diterimanya, sehingga memungkinkan kontrol yang tepat dan pemosisian yang akurat.
Dalam hal kinerja, motor servo AC lebih unggul daripada motor servo DC. Motor servo AC menggunakan kontrol gelombang sinus, menghasilkan riak torsi rendah dan kapasitas tinggi.
Sebaliknya, motor servo DC menggunakan kontrol gelombang trapesium dan memiliki kinerja yang relatif buruk.
Namun, motor servo tanpa sikat pada motor servo DC berkinerja lebih baik daripada motor servo sikat.
Prinsip kerja driver motor servo
Bagian dalam motor servo berisi rotor magnet permanen.
Aktuator mengontrol listrik tiga fase U/V/W untuk menghasilkan medan elektromagnetik, yang menyebabkan rotor berputar.
Selain itu, encoder motor memberikan sinyal umpan balik kepada pengemudi.
Pengemudi menyesuaikan sudut rotasi rotor berdasarkan nilai umpan balik dan nilai target yang diinginkan.
Penggerak motor servo DC sikat:
Prinsip pengoperasian motor mirip dengan motor DC standar.
Aktuator memiliki struktur tiga loop, yang terdiri dari loop arus, loop kecepatan, dan loop posisi, yang disusun secara berurutan dari dalam ke luar.
Output loop arus mengontrol tegangan jangkar motor.
Input loop saat ini adalah output PID loop kecepatan, input loop kecepatan adalah output PID loop posisi, dan input loop posisi adalah input yang ditentukan.
Diagram kontrol diilustrasikan di atas.
Penggerak motor servo DC tanpa sikat:
Sumber daya adalah DC, yang diubah menjadi daya AC U/V/W oleh inverter tiga fase internal.
Pengemudi juga menggunakan struktur kontrol tiga loop (loop arus, loop kecepatan, loop posisi), dan prinsip kontrol pengemudiannya sama seperti yang dijelaskan sebelumnya.
Penggerak motor servo AC:
Sistem ini dapat dibagi ke dalam dua modul terpisah: panel daya dan panel kontrol, masing-masing dengan fungsi yang berbeda.
Panel kontrol mengeluarkan sinyal PWM melalui algoritme yang sesuai, yang berfungsi sebagai sirkuit penggerak untuk sinyal penggerak, untuk memodifikasi daya output inverter dan mencapai kontrol motor servo AC sinkron magnet permanen tiga fase.
Unit penggerak daya pertama-tama mengubah input listrik tiga fase atau listrik kota menjadi listrik arus searah melalui rangkaian penyearah jembatan penuh tiga fase.
Motor servo AC sinkron magnet permanen tiga fase kemudian digerakkan oleh komutator inverter tipe tegangan PWM sinusoidal tiga fase, mengikuti perbaikan listrik tiga fase atau listrik kota.
Proses ini hanyalah konversi AC-DC-AC.
Unit kontrol adalah inti dari seluruh sistem servo AC dan melakukan kontrol posisi sistem, kontrol kecepatan, kontrol torsi, dan kontrol arus.
Perbandingan kinerja motor servo dan motor stepper
Akurasi Kontrol
Semakin banyak fase dan detak yang dimiliki motor loncatan, semakin besar akurasinya.
Motor servo memperoleh umpan balik dari encodernya sendiri, dan semakin banyak skala yang dimiliki encoder, semakin tinggi presisinya.
Karakteristik Frekuensi Rendah
Motor stepper rentan terhadap getaran frekuensi rendah pada kecepatan rendah.
Untuk mengatasi hal ini, operasi kecepatan rendah sering menggunakan teknologi redaman atau subdivisi.
Sebaliknya, motor servo berjalan mulus tanpa getaran, bahkan pada kecepatan rendah.
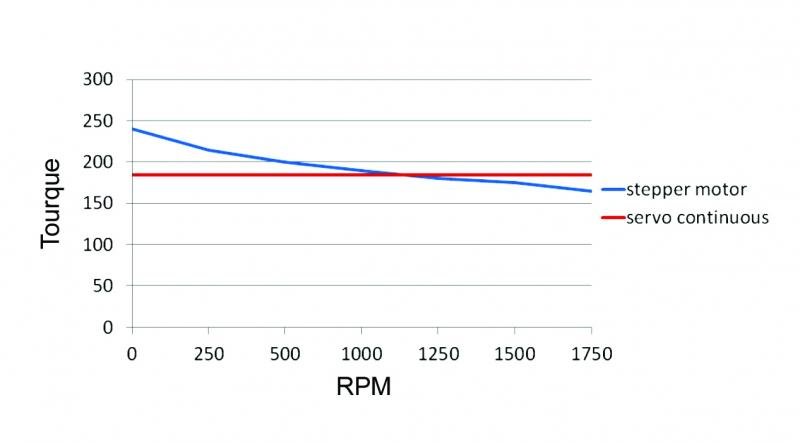
Karakteristik frekuensi torsi
Torsi output motor stepper berkurang dengan peningkatan kecepatan dan turun secara signifikan pada kecepatan tinggi.
Sebaliknya, motor servo memberikan output torsi konstan pada kecepatan pengenalnya dan output daya konstan pada kecepatan pengenalnya.
Kapasitas Kelebihan Beban
Motor stepper tidak memiliki kapasitas beban berlebih, sedangkan motor servo memiliki kapasitas beban berlebih yang kuat.
Kinerja Operasi
Motor stepper beroperasi di bawah kontrol loop terbuka, sehingga rentan kehilangan langkah atau berhenti berputar jika frekuensi awal terlalu tinggi atau beban terlalu berat. Jika kecepatannya terlalu tinggi, ini juga dapat mengakibatkan overshooting.
Di sisi lain, sistem penggerak servo AC menggunakan kontrol loop tertutup. Pengemudi motor servo mengambil sampel sinyal umpan balik encoder motor secara langsung, membentuk posisi internal dan loop kontrol kecepatan. Hasilnya, motor stepper cenderung tidak kehilangan langkah atau overshoot, sehingga kinerja kontrol lebih dapat diandalkan.
Performa Respons Kecepatan
Motor stepper memerlukan waktu ratusan milidetik untuk berakselerasi dari kondisi statis ke kecepatan operasi.
Sebagai perbandingan, sistem servo AC memiliki kinerja akselerasi yang sangat baik, biasanya hanya membutuhkan waktu beberapa milidetik, sehingga cocok untuk aplikasi yang membutuhkan start dan stop yang cepat.