Motore CC senza spazzole vs. motore sincrono a magneti permanenti
Vi siete mai chiesti cosa distingue i motori DC brushless dai motori sincroni a magneti permanenti? Questo articolo si addentra nell'affascinante mondo di questi due tipi di motori, esplorandone i principi, i metodi di controllo, l'efficienza e le caratteristiche di risposta. Alla fine, capirete qual è il motore più adatto alle vostre esigenze.
I motori a corrente continua senza spazzole (BLDC) e i motori sincroni a magneti permanenti (PMSM) sono due tipi di motori ampiamente utilizzati nel campo dei motori elettrici moderni.
Sebbene presentino molte analogie, esistono comunque alcune importanti differenze. Questo articolo fornisce un confronto esaustivo, concreto e dettagliato di questi due tipi di motori sotto diversi aspetti.
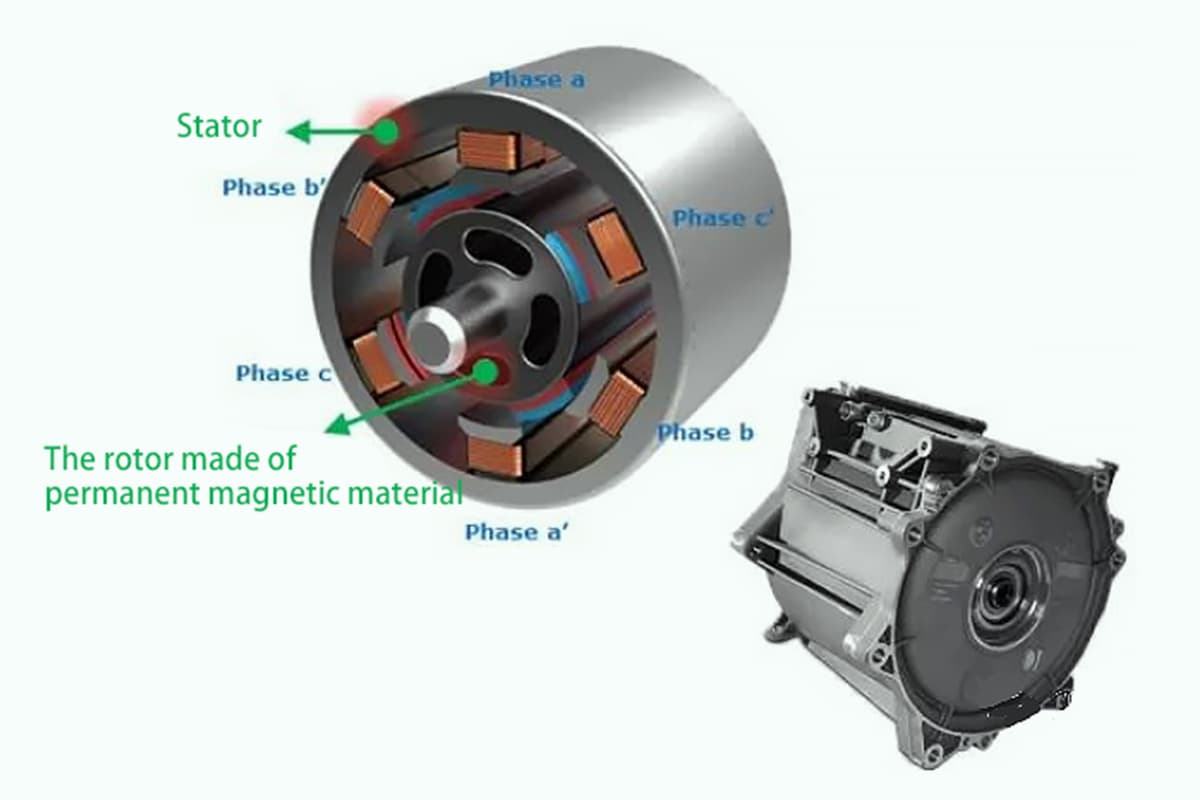
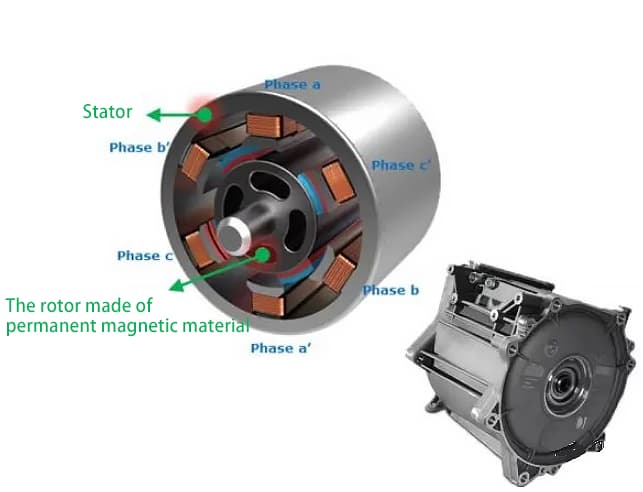
Il motore CC senza spazzole funziona su un campo magnetico rotante formato dal potenziale magnetico all'estremità dell'albero, sincronizzando la commutazione di fase attraverso il polo di rilevamento per guidare il movimento del rotore.
La sua struttura è costituita da un rotore formato da magneti permanenti, uno statore avvolto da bobine e un sensore di posizione. Modificando la direzione e l'entità della corrente, è possibile controllare il movimento del rotore.
Motore sincrono a magnete permanente:
Il motore sincrono a magneti permanenti funziona grazie all'interazione dei potenziali magnetici tra lo statore e il rotore, generando una coppia che aziona il movimento del rotore.
Il rotore genera un campo magnetico rotante attraverso i magneti permanenti, mentre le bobine dello statore creano un campo magnetico di eccitazione. L'interazione di questi due campi magnetici aziona il rotore.
La struttura di un motore sincrono a magneti permanenti è simile a quella di un motore DC brushless, ma la differenza sta nella funzione delle bobine di statore: nei motori DC brushless assistono il campo magnetico, mentre nei motori sincroni a magneti permanenti generano il campo magnetico di eccitazione.
2. Metodi di controllo Motore CC senza spazzole:
Motore DC senza spazzole:
Il controllo dei motori DC brushless si basa principalmente su due metodi: la retroazione del sensore di Hall e il controllo della forza retroelettromotrice. Il metodo di retroazione del sensore di Hall determina la tempistica della commutazione rilevando la posizione del rotore e controllando la direzione e l'entità della corrente.
Il metodo di controllo della forza retroelettromotrice stima la posizione del rotore e misura la forza retroelettromotrice delle bobine di armatura per il controllo. Questo metodo consente di ottenere un'elevata efficienza e una coppia elevata.
Motore sincrono a magnete permanente:
I metodi di controllo dei motori sincroni a magneti permanenti comprendono principalmente il controllo della corrente e il controllo orientato al campo. Il metodo di controllo della corrente controlla la coppia e la velocità del motore misurando la corrente.
Il controllo a orientamento di campo stima la posizione del rotore e misura la forza retroelettromotrice del rotore per controllare la corrente, ottenendo un controllo e una risposta più precisi.
3. Densità di potenza ed efficienza del motore CC senza spazzole:
Motore DC senza spazzole:
I motori CC senza spazzole hanno un'elevata densità di potenza ed efficienza. Grazie alla loro struttura semplice, priva di spazzole e di problemi di usura delle stesse, possono raggiungere una potenza elevata.
Inoltre, l'uso del controllo della forza elettromotrice posteriore riduce le perdite di rame e ferro, consentendo un funzionamento efficiente.
Motore sincrono a magnete permanente:
I motori sincroni a magneti permanenti hanno un'alta densità di potenza ma un'efficienza relativamente bassa. A causa della loro struttura complessa e della necessità di mantenere un campo magnetico di eccitazione nelle bobine dello statore, si verificano perdite di rame e ferro.
Inoltre, la presenza di un campo magnetico rotante comporta ulteriori perdite per correnti parassite. Tuttavia, l'efficienza può essere migliorata attraverso strategie di controllo ottimizzate e tecnologie avanzate dei materiali.
4. Caratteristiche di risposta e campo di controllo Motore CC senza spazzole
Motore DC senza spazzole:
I motori CC senza spazzole presentano buone caratteristiche di risposta e un'ampia gamma di controllo. Poiché i loro rotori sono costituiti da magneti permanenti, hanno una bassa inerzia del rotore e una velocità di risposta rapida. Inoltre, i motori DC brushless possono ottenere un controllo preciso regolando l'ampiezza e la direzione della corrente per soddisfare vari requisiti operativi.
Motore sincrono a magnete permanente:
I motori sincroni a magneti permanenti hanno caratteristiche di risposta relativamente più scadenti e un campo di regolazione più ristretto. A causa della maggiore inerzia del rotore, la velocità di risposta del rotore è più lenta. Inoltre, il controllo dei motori sincroni a magnete permanente è più complesso e richiede una stima accurata della posizione del rotore e della forza retroelettromotrice per un controllo preciso.
5. Avvolgere il tutto
In sintesi, i motori brushless in c.c. e i motori sincroni a magneti permanenti presentano notevoli differenze in aspetti quali il principio e la struttura, i metodi di controllo, la densità di potenza e l'efficienza, nonché le caratteristiche di risposta e il campo di controllo. A seconda dei requisiti dell'applicazione, il motore tipo di motore può essere scelto.
I motori CC senza spazzole sono adatti alle applicazioni che richiedono una potenza elevata e un controllo preciso, mentre i motori sincroni a magneti permanenti sono adatti alle applicazioni che richiedono un'elevata densità di potenza e un campo di controllo più ampio.
Non dimenticatevi che condividere è un'opera di carità! : )
Condividi
Facebook
Twitter
LinkedIn
Reddit
VK
Email
Stampa
Autore
Shane
Fondatore di MachineMFG
In qualità di fondatore di MachineMFG, ho dedicato oltre un decennio della mia carriera al settore della lavorazione dei metalli. La mia vasta esperienza mi ha permesso di diventare un esperto nei campi della fabbricazione di lamiere, della lavorazione, dell'ingegneria meccanica e delle macchine utensili per metalli. Penso, leggo e scrivo costantemente su questi argomenti, cercando di essere sempre all'avanguardia nel mio campo. Lasciate che le mie conoscenze e la mia esperienza siano una risorsa per la vostra azienda.
Vi siete mai chiesti perché i motori brushless superano i motori a spazzole? I motori brushless offrono efficienza e durata, grazie alla commutazione elettronica che riduce l'attrito e l'usura. I motori a spazzole, invece, pur essendo più semplici e...
Vi siete mai chiesti chi alimenta le macchine che fanno funzionare il nostro mondo? In questo blog post, vi presenteremo i principali produttori di compressori che stanno guidando l'innovazione e...
Nel frenetico mondo dell'automazione industriale, i servomotori sono gli eroi non celebrati della precisione e dell'efficienza. Ma con innumerevoli produttori che si contendono l'attenzione, come si fa a sapere quali...
Come fanno i motori elettrici a convertire l'elettricità in movimento? Immaginate un mondo in cui quasi la metà della nostra energia elettrica è alimentata da questi motori. Questo articolo approfondisce la scienza dei motori elettrici, spiegando...
Immaginate un mondo senza il ronzio dei motori: niente auto, niente elettrodomestici, niente macchine industriali. I motori convertono l'energia elettrica in energia meccanica, alimentando qualsiasi cosa, dai giocattoli ai giganti della produzione. In questo...
Che cosa distingue i servomotori dai motori passo-passo, pur essendo fondamentali nei macchinari moderni? Questo articolo ne esplora le differenze fondamentali, i vantaggi e le applicazioni specifiche. Leggendo, si potranno ottenere informazioni sui loro...
Che tipo di domande possono aiutarvi a superare un colloquio di ingegneria meccanica? Questo articolo analizza le 20 domande principali che mettono alla prova vari aspetti dell'ingegneria meccanica, dai sistemi di trasmissione...
Vi siete mai chiesti come fanno i treni a fluttuare sui binari o come fanno i robot a realizzare movimenti precisi? Questo articolo svela l'affascinante mondo dei motori lineari, spiegandone i principi, i tipi e i vantaggi unici....