Vi siete mai chiesti cosa distingue i motori a corrente continua da quelli a corrente alternata? In questo articolo esploriamo le differenze fondamentali tra questi due tipi di motori, compresi i principi di funzionamento, l'efficienza e le applicazioni. Comprendendo queste distinzioni chiave, si otterranno preziose indicazioni su quale sia il motore più adatto per le varie applicazioni industriali e di consumo. Immergetevi per scoprire come questi componenti essenziali alimentano il mondo che ci circonda!
Spiegherò il principio di funzionamento e le differenze tra motori a corrente continua e a corrente alternata nel modo più semplice e comprensibile.
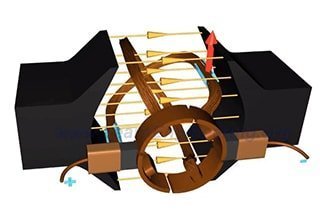
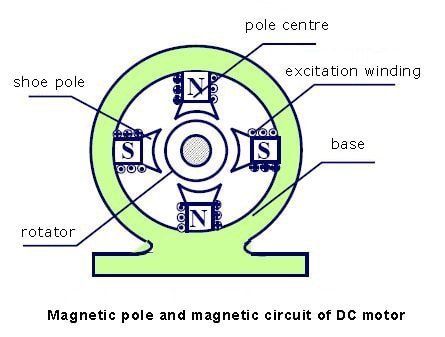
L'immagine sopra raffigura la rappresentazione fisica più semplice di un motore a corrente continua.
Wprincipio di funzionamento
Motore CC
In un motore CC, la corrente proveniente dall'alimentazione CC passa dal polo positivo al lato sinistro della spazzola. La spazzola e il commutatore si sfregano l'uno contro l'altro e la corrente passa attraverso il commutatore sinistro, che ha due segmenti destro e sinistro, nella bobina e fuoriesce dal lato destro della bobina. La corrente torna quindi al polo negativo dell'alimentatore, creando un circuito chiuso.
La bobina si trova nel campo magnetico dei poli magnetici principali (N e S) ed è soggetta a una forza elettromagnetica. Poiché i due lati della bobina hanno direzioni di corrente diverse (verso l'interno a sinistra e verso l'esterno a destra), sono soggetti a forze elettromagnetiche di entità opposta. Queste due forze creano la coppia elettromagnetica, che provoca la rotazione della bobina.
La bobina viene inserita nella fessura del rotore, provocando l'avvio della rotazione del motore. I pezzi di inversione ruotano con l'albero in rotazione, mentre la spazzola rimane ferma. Dopo una rotazione, la bobina a destra si sposta a sinistra e quella a sinistra a destra. Tuttavia, il commutatore assicura che la corrente nella bobina di sinistra scorra nella stessa direzione della corrente nella bobina di destra, con conseguente direzione costante della forza elettromagnetica ricevuta nella stessa posizione. Ciò garantisce la rotazione ciclica del motore.
Tuttavia, il campo magnetico della bobina cambia quando la bobina ruota in posizioni diverse, facendo cambiare anche la forza elettromagnetica sulla bobina. Ciò rende instabile la rotazione della bobina, che rallenta improvvisamente. Per garantire una forza uniforme e stabile della bobina, è possibile installare più bobine.
Si ottiene quindi quanto segue:
Anche con un modello di motore di questo tipo:
Inoltre, i due poli magnetici esterni del motore sono in realtà creati dalle bobine di eccitazione che generano elettromagneti. Nei motori più piccoli si utilizzano magneti permanenti, mentre in quelli più grandi si utilizzano elettromagneti.
Il modello è una semplice rappresentazione, ma il rotore reale del motore è strutturato in questo modo.
Motore CA
I motori a corrente alternata sono classificati in due categorie: motori sincroni e motori asincroni. I motori sincroni sono utilizzati principalmente come generatori, mentre i motori asincroni sono utilizzati principalmente come motori elettrici. La presente trattazione si concentra sui motori asincroni.
I motori asincroni sono favoriti per la loro struttura semplice, il basso costo, la facilità di manutenzione e l'affidabilità di funzionamento, che ne hanno determinato la diffusione. Nonostante la loro struttura semplice, il principio di funzionamento dei motori asincroni è in realtà più complesso di quello dei motori a corrente continua, rendendo più difficile una chiara comprensione della tecnologia.
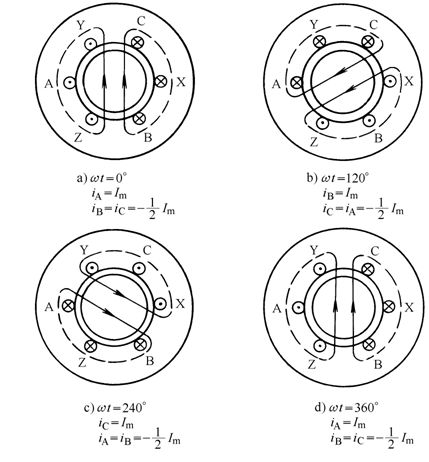
Allo statore del motore CA viene applicata una corrente alternata simmetrica trifase, come illustrato nella figura precedente. Lo statore rimane fermo e solo una variazione della corrente può generare un campo magnetico rotante sintetico. Questo campo magnetico agisce come un magnete rotante attorno allo statore, rendendolo più facile da lavorare.
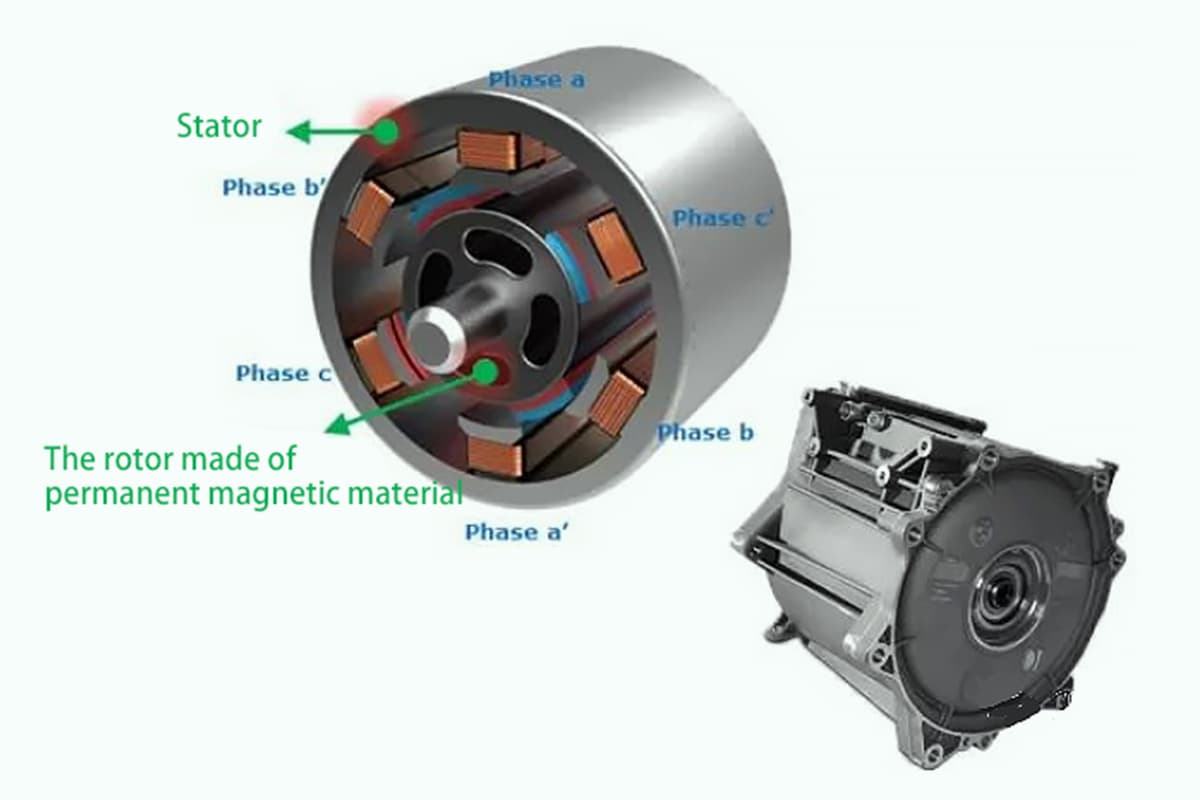
All'interno dello statore si trova una bobina chiusa, nella quale vengono indotte una forza elettromotrice e una corrente che generano una forza elettromagnetica. Ciò provoca la rotazione della bobina chiusa.
Si capisce anche che sullo statore c'è un magnete rotante e che la bobina chiusa all'interno del rotore funziona come un elettromagnete grazie alla carica per induzione. La rotazione dell'elettromagnete esterno provoca la rotazione dell'elettromagnete interno, facendo così ruotare il rotore del motore CA.
La velocità di rotazione del campo magnetico dello statore è definita velocità sincrona. Il rotore, che è azionato dal campo magnetico dello statore, ruota a una velocità inferiore, detta velocità asincrona. Da qui deriva il termine "motore asincrono".
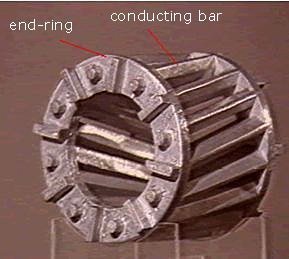
Il rotore di un motore a corrente alternata è una semplice bobina o conduttore chiuso, spesso definito motore asincrono "a gabbia di topi" per la sua struttura a gabbia. La forza elettromotrice e la corrente all'interno del rotore sono indotte dal campo magnetico dello statore, motivo per cui il motore asincrono è noto anche come motore a induzione.
Pertanto, il motore asincrono trifase ha diversi nomi, tra cui motore a corrente alternata, motore asincrono e motore a induzione, ognuno dei quali si riferisce ad esso da una prospettiva diversa. Se avete altre domande, fatele pure nei commenti e farò del mio meglio per fornirvi risposte dettagliate.
Non dimenticatevi che condividere è un'opera di carità! : )
Condividi
Facebook
Twitter
LinkedIn
Reddit
VK
Email
Stampa
Autore
Shane
Fondatore di MachineMFG
In qualità di fondatore di MachineMFG, ho dedicato oltre un decennio della mia carriera al settore della lavorazione dei metalli. La mia vasta esperienza mi ha permesso di diventare un esperto nei campi della fabbricazione di lamiere, della lavorazione, dell'ingegneria meccanica e delle macchine utensili per metalli. Penso, leggo e scrivo costantemente su questi argomenti, cercando di essere sempre all'avanguardia nel mio campo. Lasciate che le mie conoscenze e la mia esperienza siano una risorsa per la vostra azienda.
Vi siete mai chiesti come fanno i treni a fluttuare sui binari o come fanno i robot a realizzare movimenti precisi? Questo articolo svela l'affascinante mondo dei motori lineari, spiegandone i principi, i tipi e i vantaggi unici....
Vi siete mai chiesti cosa distingue i motori DC brushless dai motori sincroni a magneti permanenti? Questo articolo si immerge nell'affascinante mondo di questi due tipi di motori, esplorando i loro principi,...
Come fanno i motori elettrici a convertire l'elettricità in movimento? Immaginate un mondo in cui quasi la metà della nostra energia elettrica è alimentata da questi motori. Questo articolo approfondisce la scienza dei motori elettrici, spiegando...
I servosistemi sono parte integrante dei prodotti elettromeccanici e forniscono il massimo livello di risposta dinamica e densità di coppia. Pertanto, la tendenza nello sviluppo dei sistemi di azionamento è quella di sostituire i tradizionali...
Nel frenetico mondo dell'automazione industriale, i servomotori sono gli eroi non celebrati della precisione e dell'efficienza. Ma con innumerevoli produttori che si contendono l'attenzione, come si fa a sapere quali...
Che tipo di domande possono aiutarvi a superare un colloquio di ingegneria meccanica? Questo articolo analizza le 20 domande principali che mettono alla prova vari aspetti dell'ingegneria meccanica, dai sistemi di trasmissione...
Vi siete mai chiesti cosa alimenta i sistemi idrici della vostra casa, azienda agricola o città? Questo articolo esplora i principali produttori di pompe per pozzi profondi, facendo luce sui leader del settore come...
Vi siete mai chiesti come scegliere il motore perfetto per il vostro progetto? La chiave sta nel comprendere i tipi di motori - a corrente continua, asincroni e sincroni - e i loro vantaggi specifici. Questo articolo analizza...
Vi siete mai chiesti cosa rende sicuro e affidabile l'impianto elettrico della vostra casa? Gli apparecchi elettrici a bassa tensione, come gli interruttori e i contattori, svolgono un ruolo cruciale in tal senso. Questo articolo illustra la...