Come funzionano i motori elettrici? Una guida completa
Come fanno i motori elettrici a convertire l'elettricità in movimento? Immaginate un mondo in cui quasi la metà della nostra energia elettrica sia alimentata da questi motori. Questo articolo approfondisce la scienza dei motori elettrici, spiegando come utilizzano i campi magnetici e la corrente per produrre un movimento rotatorio o lineare. Comprendendo i diversi tipi di motori, come quelli a corrente continua e a corrente alternata, e i loro meccanismi interni, si comprenderà il loro ruolo cruciale nella tecnologia moderna. Siete pronti a svelare i misteri di questi dispositivi onnipresenti? Continuate a leggere per esplorare i principi e le applicazioni dei motori elettrici.
Quasi la metà del consumo energetico mondiale è attribuito ai motori elettrici, per cui il miglioramento della loro efficienza è considerato la misura più efficace per affrontare i problemi energetici globali.
Tipi di motori
In generale, i motori convertono la forza generata dal flusso di corrente in un campo magnetico in un movimento rotatorio, ma in generale includono anche il movimento lineare.
In base al tipo di sorgente di energia che aziona il motore, possono essere classificati in motori a corrente continua e motori a corrente alternata.
Inoltre, in base al principio di rotazione del motore, possono essere suddivisi grossolanamente nelle seguenti categorie, esclusi i motori speciali.
1. Motori a corrente continua (DC)
(1) Motori a spazzole
I motori a spazzole, molto diffusi, sono generalmente chiamati motori a corrente continua. Essi ruotano mettendo in contatto sequenziale gli elettrodi chiamati "spazzole" (sul lato statore) e il "commutatore" (sul lato indotto) per commutare la corrente.
(2) Motori CC senza spazzole
I motori CC senza spazzole non richiedono spazzole e commutatori. Utilizzano funzioni di commutazione come i transistor per commutare la corrente e ottenere il movimento rotatorio.
(3) Motori passo-passo
Questo motore funziona in sincronia con la potenza degli impulsi ed è quindi noto anche come motore a impulsi. La sua caratteristica è la capacità di ottenere facilmente un posizionamento preciso.
2. Motori a corrente alternata
(1) Motori asincroni
La corrente alternata genera un campo magnetico rotante nello statore, facendo sì che il rotore induca la corrente e ruoti sotto la sua interazione.
(2) Motori sincroni
La corrente alternata crea un campo magnetico rotante e il rotore con i poli magnetici ruota per attrazione. La velocità di rotazione è sincronizzata con la frequenza di alimentazione.
Motore passo-passo
Motore a corrente continua spazzolato
Motore a corrente continua senza spazzole
Corrente, campi magnetici e forza
In primo luogo, per facilitare le spiegazioni successive sui principi del motore, rivediamo le leggi/regole fondamentali relative alla corrente, ai campi magnetici e alla forza.
Sebbene possa evocare un senso di nostalgia, questa conoscenza può essere facilmente dimenticata se i componenti magnetici non vengono utilizzati regolarmente.
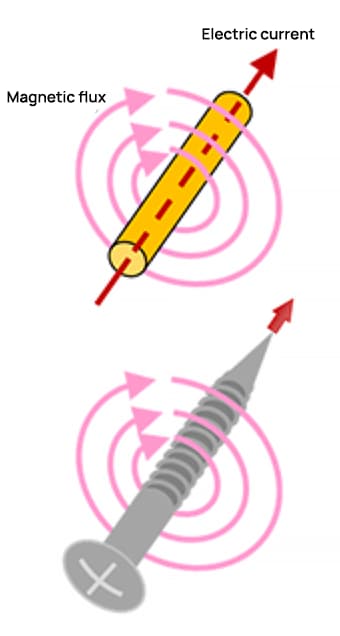
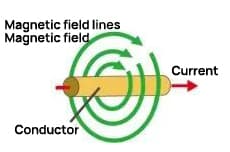
Legge di Ampere (regola della vite a destra)
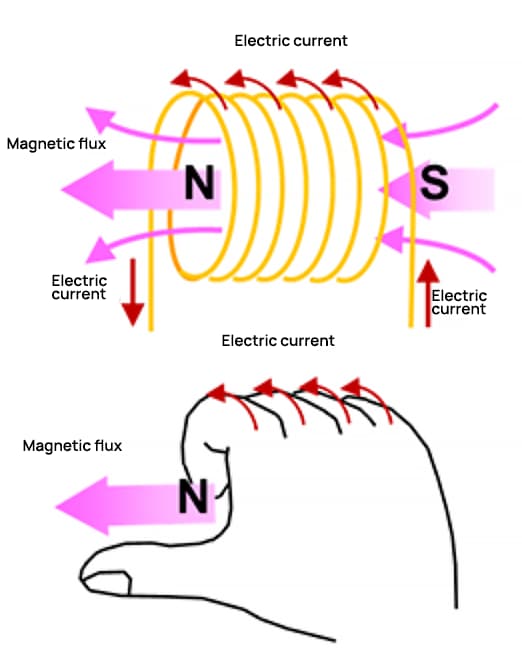
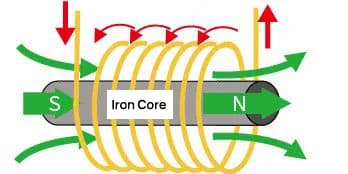
Il flusso magnetico generato da una corrente in una bobina
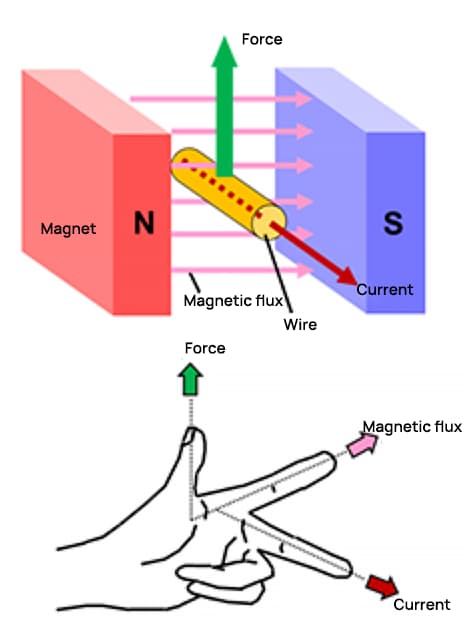
Basato sulla regola della mano sinistra di Fleming
Lo illustreremo utilizzando immagini ed equazioni.
Schema di rotazione del motore
Quando la struttura del filo è rettangolare, è necessario considerare la forza che agisce sulla corrente. La forza F esercitata sulle parti a e c del telaio è:
La coppia viene generata intorno all'asse centrale. Ad esempio, se si considera uno stato in cui l'angolo di rotazione è solo θ, la forza che agisce perpendicolarmente a b e d è sinθ. Di conseguenza, la coppia Ta nella parte a è rappresentata dalla seguente formula:
Considerando la parte C allo stesso modo, la coppia viene raddoppiata, generando una coppia calcolata dalla seguente formula:
Dato che l'area di un rettangolo è S = h*l, si può ricavare il seguente risultato sostituendolo alla formula precedente:
Questa formula non è applicabile solo ai rettangoli, ma anche ad altre forme comuni come i cerchi. Questo principio è alla base del funzionamento dei motori elettrici.
Come ruota un motore?
1) I motori ruotano utilizzando i magneti e la forza magnetica.
Intorno a un magnete permanente con un albero rotante:
① Ruotare il magnete (per generare un campo magnetico rotante).
② Questo segue il principio secondo cui i poli opposti (N e S) si attraggono, mentre i poli simili si respingono.
Il magnete con l'albero rotante ruoterà.
Questo è il principio di base della rotazione del motore.
La corrente che attraversa il conduttore genera un campo magnetico rotante attorno ad esso, facendo ruotare il magnete, che rappresenta essenzialmente lo stesso stato di moto.
Inoltre, quando un conduttore viene avvolto in una bobina, le forze magnetiche si sintetizzano per formare un grande flusso magnetico, creando un polo Nord e un polo Sud.
Inoltre, inserendo un nucleo ferroso nel conduttore arrotolato, le linee del campo magnetico possono passare più facilmente, generando così una forza magnetica più forte.
2) Motori rotanti operativi
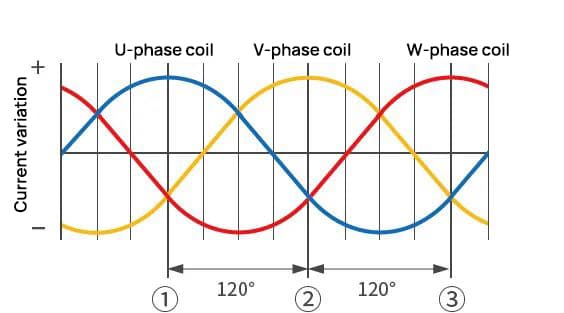
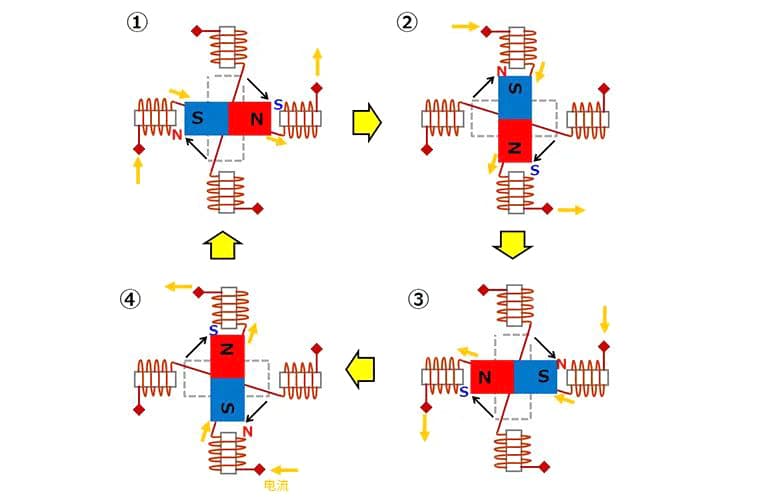
In questo contesto, presentiamo un approccio pratico per i motori rotanti, dimostrando l'uso della corrente alternata trifase e delle bobine per generare un campo magnetico rotante. (La corrente alternata trifase si riferisce a segnali alternati sfasati a intervalli di 120°).
Il campo magnetico sintetizzato nel suddetto Stato ① corrisponde alla Figura ① seguente.
Il campo magnetico sintetizzato nel già citato Stato ② si allinea con la Figura ② riportata di seguito.
Il campo magnetico sintetizzato associato al suddetto Stato ③ è rappresentato nella Figura ③ seguente.
Come già detto, la bobina avvolta intorno al nucleo di ferro è suddivisa in tre fasi: bobina a U, bobina a V e bobina a W, disposte a intervalli di 120°. La bobina con una tensione maggiore genera un polo nord, mentre quella con una tensione minore genera un polo sud.
Ogni fase varia in base all'onda sinusoidale, quindi la polarità (polo nord o sud) e il campo magnetico (forza magnetica) generato da ogni bobina cambieranno.
A questo punto, se consideriamo solo la bobina che genera il polo nord, la sequenza di cambiamenti passa dalla bobina di fase U alla bobina di fase V, poi alla bobina di fase W e infine di nuovo alla bobina di fase U, producendo così una rotazione.
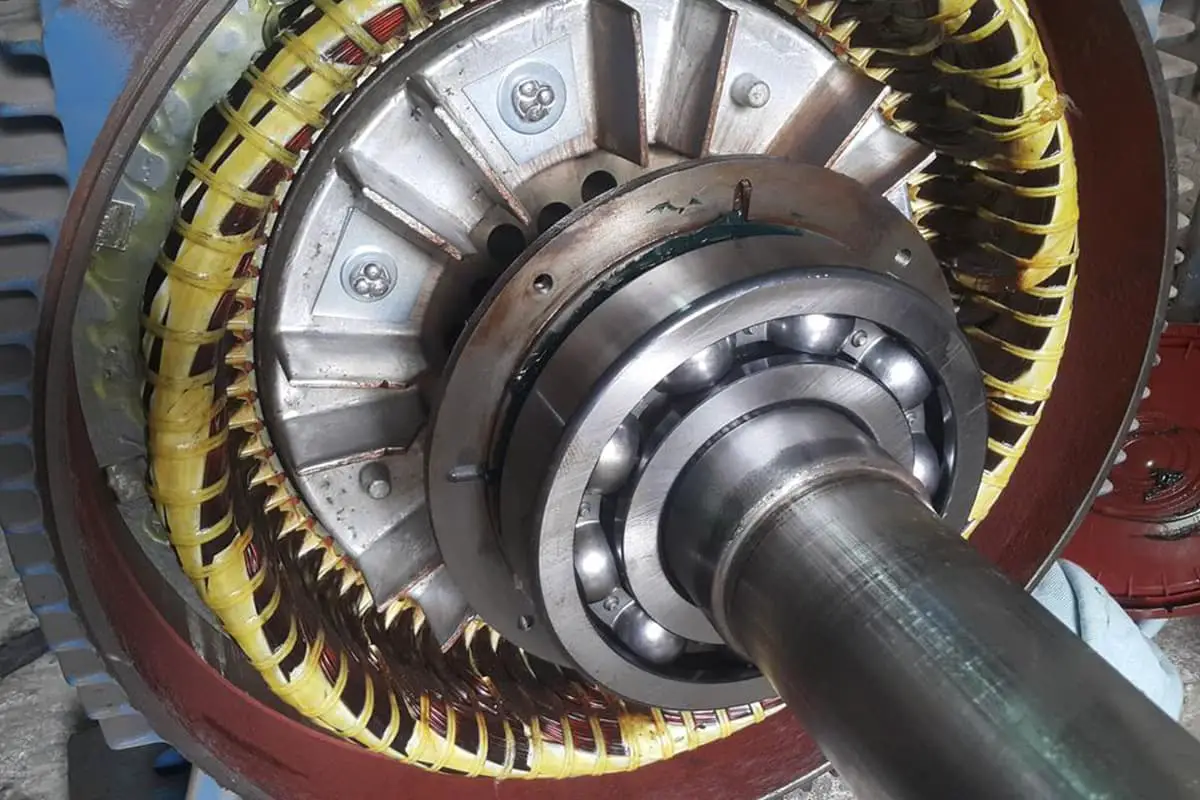
Struttura dei piccoli motori
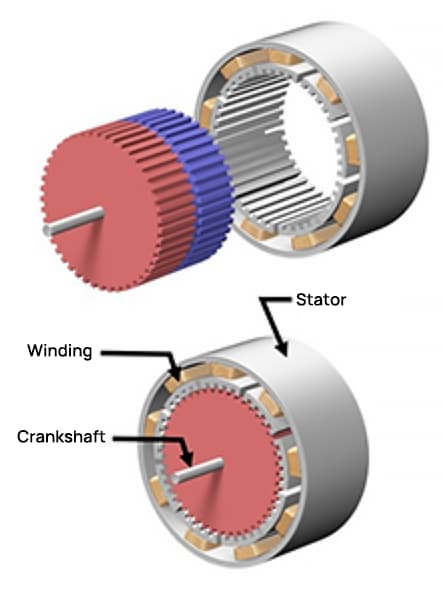
La figura seguente fornisce una struttura generale e un confronto tra tre tipi di motori: motori passo-passo, motori a spazzole in corrente continua (CC) e motori brushless in corrente continua (CC).
I componenti di base di questi motori comprendono principalmente bobine, magneti e rotori. A causa delle loro diverse tipologie, sono ulteriormente classificati in tipi a bobina fissa e a magnete fisso.
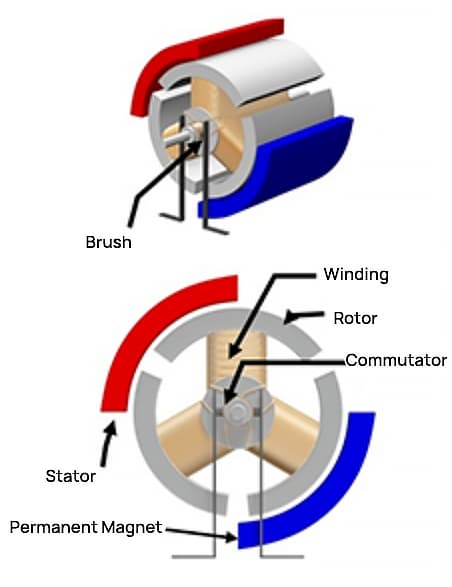
Motore passo-passo
Motore a corrente continua spazzolato
Motore a corrente continua senza spazzole
Quella che segue è una descrizione strutturale relativa al diagramma di esempio. Si prega di comprendere che questo documento introduce la struttura all'interno di un quadro generale, in quanto possono esistere altre strutture se suddivise in modo più dettagliato.
Le bobine del motore passo-passo sono fisse all'esterno e i magneti ruotano all'interno; i magneti del motore CC a spazzole sono fissi all'esterno e le bobine ruotano all'interno.
L'alimentazione delle bobine e il cambio di direzione della corrente sono gestiti da spazzole e commutatori; nei motori brushless, le bobine sono fissate all'esterno e i magneti ruotano all'interno.
A causa delle variazioni nei tipi di motore, anche a parità di componenti di base, le loro strutture possono differire. I dettagli specifici saranno illustrati in ogni sezione.
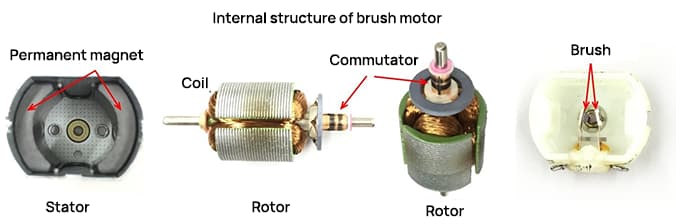
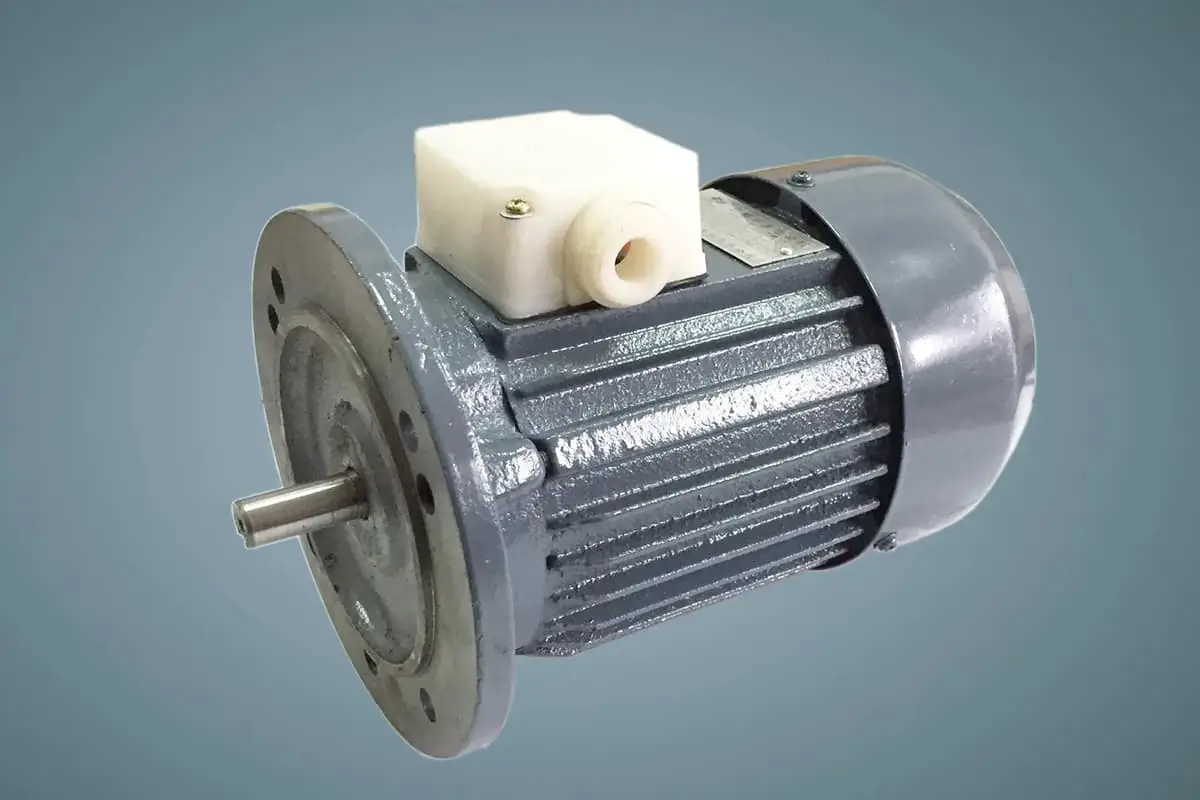
Motore a spazzole
Struttura del motore a spazzole
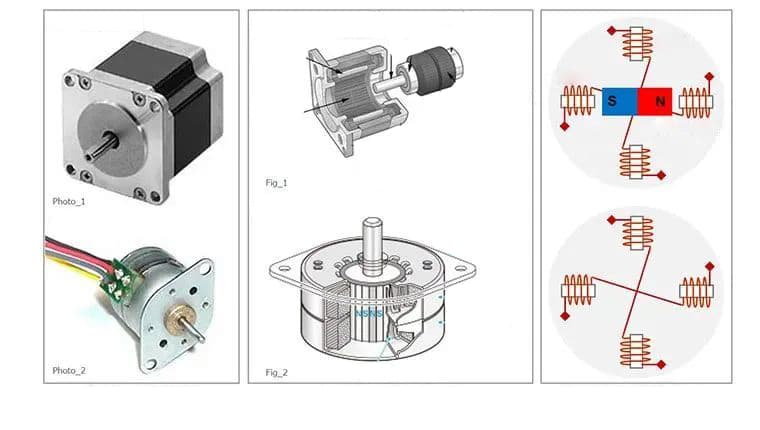
L'immagine sottostante mostra l'esterno di un motore a spazzole in c.c. comunemente utilizzato nei modelli, nonché una vista esplosa di un tipico motore a due poli (due magneti) e tre scanalature (tre bobine). Molti possono avere esperienza nello smontaggio dei motori e nella rimozione dei magneti.
In un motore CC a spazzole, i magneti permanenti sono fermi mentre le bobine possono ruotare intorno al centro interno. Il lato stazionario è noto come "statore", mentre il lato rotante viene chiamato "rotore".
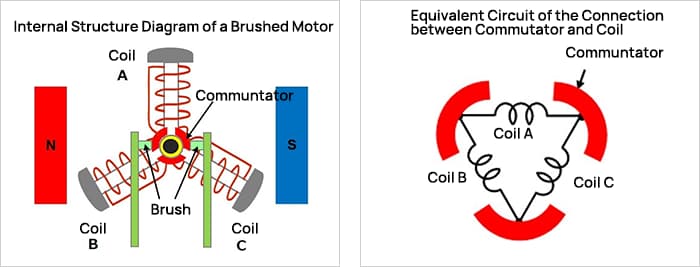
Ecco un diagramma schematico che illustra i concetti strutturali.
L'asse centrale di rotazione è circondato da tre commutatori - piastre metalliche curve utilizzate per la commutazione della corrente elettrica. Per evitare il contatto reciproco, i commutatori sono disposti a 120° l'uno dall'altro (360° ÷ 3 unità). Questi commutatori ruotano con l'asse.
Ogni commutatore è collegato a un'estremità di una bobina e a un'altra; insieme, i tre commutatori e le tre bobine formano una rete di circuiti completa (anello).
Due spazzole sono fissate a 0° e a 180° per entrare in contatto con i commutatori. Una fonte di alimentazione esterna in corrente continua è collegata alle spazzole e la corrente scorre lungo il percorso dalla spazzola al commutatore, dal commutatore alla bobina e dalla bobina alla spazzola.
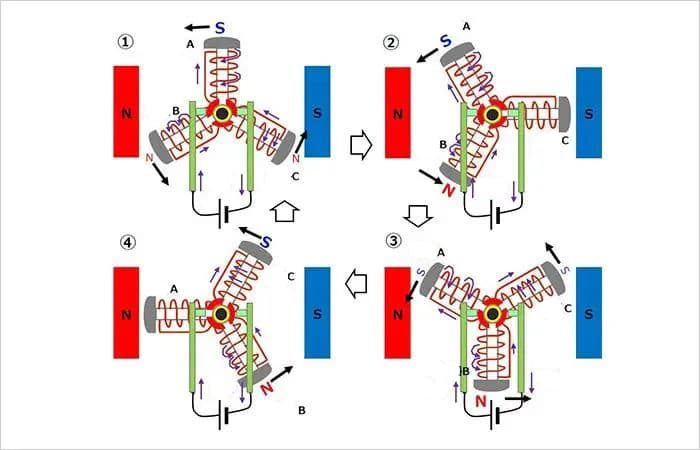
Questo è il principio di rotazione di un motore a spazzole.
① Rotazione in senso antiorario dallo stato iniziale
La bobina A si trova in alto, con la fonte di alimentazione collegata alle spazzole, designando il lato sinistro come (+) e quello destro come (-). Una corrente elevata fluisce dalla spazzola sinistra attraverso il commutatore nella bobina A. Questo trasforma la parte superiore (esterna) della bobina A in un polo sud (S).
Poiché metà della corrente della bobina A scorre dal pennello sinistro alle bobine B e C in direzione opposta alla bobina A, i lati esterni delle bobine B e C diventano deboli poli nord (N), indicati con lettere più piccole nel diagramma.
I campi magnetici generati in queste bobine, insieme alla repulsione e all'attrazione dei magneti, forniscono una forza che fa ruotare le bobine in senso antiorario.
② Ulteriore rotazione in senso antiorario
Quindi, supponendo che la bobina A abbia ruotato di 30° in senso antiorario, la spazzola destra entra in contatto con i due commutatori.
La corrente nella bobina A continua a fluire dalla spazzola sinistra attraverso la spazzola destra e il lato esterno della bobina rimane un polo sud. La stessa corrente scorre nella bobina B, trasformando il suo lato esterno in un polo nord più forte. La bobina C è messa in cortocircuito dalle spazzole a entrambe le estremità, quindi non c'è flusso di corrente e non viene generato alcun campo magnetico.
Anche in questo stato, viene applicata una forza di rotazione antioraria. Da ③ a ④, la bobina superiore continua a essere guidata verso sinistra e la bobina inferiore continua a essere guidata verso destra, con conseguente rotazione continua in senso antiorario.
Ogni 30° di rotazione della bobina verso gli stati ③ e ④, quando la bobina si trova al di sopra dell'asse orizzontale centrale, il suo lato esterno diventa un polo sud; quando si trova al di sotto, diventa un polo nord, e questo movimento si ripete.
In altre parole, la bobina superiore subisce ripetutamente una forza verso sinistra e quella inferiore verso destra (entrambe in senso antiorario). In questo modo il rotore continua a ruotare in senso antiorario.
Se la fonte di alimentazione è collegata alla spazzola sinistra (-) e alla spazzola destra (+), si genera un campo magnetico inverso nella bobina, invertendo così la direzione della forza applicata alla bobina e facendola ruotare in senso orario.
Inoltre, quando la fonte di alimentazione viene scollegata, il rotore del motore a spazzole smette di ruotare a causa dell'assenza del campo magnetico che ne guidava la rotazione.
Motore brushless trifase a onda intera
Aspetto e struttura del motore brushless trifase ad onda piena
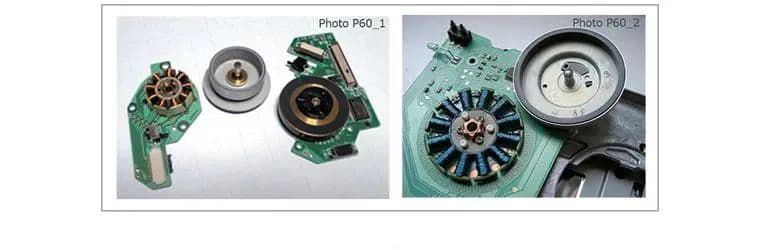
L'immagine seguente mostra un esempio dell'aspetto e della struttura del motore brushless.
Esempio di aspetto e struttura del motore brushless
Il lato sinistro mostra un esempio del motore principale del mandrino utilizzato per ruotare il disco nel dispositivo di riproduzione del disco, contenente un totale di nove bobine, tre fasi per tre.
A destra un esempio del motore del mandrino principale di un dispositivo FDD, con dodici bobine (tre fasi per quattro). Le bobine sono montate su una scheda di circuito e avvolte attorno a un nucleo di ferro.
Sul lato destro della bobina, il componente a forma di disco è un rotore a magnete permanente. Il perimetro è un magnete permanente, l'albero del rotore è inserito al centro della bobina e copre parte della bobina, con il magnete permanente che circonda la periferia della bobina.
Schema della struttura interna e circuito equivalente del motore brushless trifase a onda piena
Seguono lo schema semplificato della struttura interna e il diagramma del circuito equivalente dei collegamenti della bobina di un motore brushless trifase a onda piena.
Questo schema rappresenta una struttura semplice di un motore a 2 poli (2 magneti) e 3 scanalature (3 bobine). Assomiglia alla struttura di un motore a spazzole con un numero uguale di poli e di scanalature, con la differenza che il lato delle bobine è fisso e i magneti sono girevoli. Naturalmente, questo design non incorpora le spazzole.
In questa configurazione, le bobine sono collegate a Y. I componenti a semiconduttore forniscono corrente alle bobine, controllando l'afflusso e il deflusso di corrente in base alla posizione dei magneti rotanti.
In questo esempio, per rilevare la posizione dei magneti si utilizza un elemento di Hall. L'elemento di Hall è collocato tra le bobine, dove rileva la tensione generata dall'intensità del campo magnetico e la utilizza come informazione di posizione.
Nell'immagine precedentemente fornita del motore mandrino FDD, si può osservare anche un elemento di Hall (situato sopra le bobine) che serve a rilevare la posizione tra le bobine.
L'elemento di Hall è un noto sensore magnetico. Può convertire la grandezza di un campo magnetico in una tensione, rappresentando la direzione del campo con valori positivi o negativi. Di seguito è riportato un diagramma che illustra l'effetto Hall.
L'elemento di Hall sfrutta il fenomeno per cui "quando la corrente IH attraversa il semiconduttore e il flusso magnetico B passa ad angolo retto rispetto alla corrente, si genera una tensione VH nella direzione perpendicolare alla corrente e al campo magnetico".
Questo fenomeno, noto come "effetto Hall", è stato scoperto dal fisico americano Edwin Herbert Hall. La tensione VH generata è rappresentata dalla seguente formula.
VH=(KH/d)・IH・B
Dove KH è il coefficiente di Hall e d è lo spessore della superficie che penetra il flusso.
Come suggerisce la formula, maggiore è la corrente, maggiore è la tensione. Questa caratteristica viene spesso utilizzata per rilevare la posizione del rotore (magnete).
Principio di rotazione del motore brushless trifase a onda piena
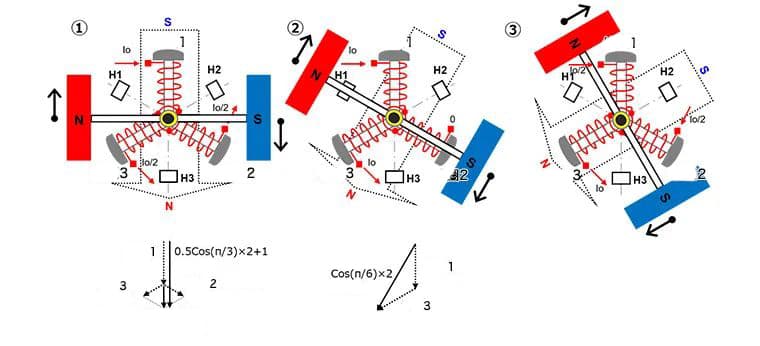
Il principio di rotazione del motore brushless sarà spiegato nei passaggi da ① a ⑥. Per facilitare la comprensione, il magnete permanente è stato semplificato da un cerchio a un rettangolo.
1) In un sistema di bobine trifase, immaginiamo che la bobina 1 sia fissata a ore 12 di un orologio, la bobina 2 a ore 4 e la bobina 3 a ore 8. Si ipotizzi un magnete permanente a 2 poli con il polo Nord a sinistra e il polo Sud a destra, in grado di ruotare.
La corrente Io viene introdotta nella bobina 1, generando un campo magnetico al polo Sud all'esterno della bobina. La metà di questa corrente, Io/2, fuoriesce dalle bobine 2 e 3, creando un campo magnetico al polo Nord sulla loro parte esterna.
Quando i campi magnetici delle bobine 2 e 3 subiscono una sintesi vettoriale, si genera un campo magnetico dal polo Nord verso il basso. Questo campo è grande la metà del campo magnetico prodotto quando la corrente Io passa attraverso una bobina e, sommato al campo della bobina 1, diventa 1,5 volte più grande. In questo modo si crea un campo magnetico sintetizzato con un angolo di 90° rispetto al magnete permanente, generando così la massima coppia e inducendo la rotazione in senso orario del magnete permanente.
Quando la corrente nella bobina 2 diminuisce e quella nella bobina 3 aumenta in base alla posizione di rotazione, anche il campo magnetico sintetizzato ruota in senso orario, continuando la rotazione del magnete permanente.
2) Con una rotazione di 30°, la corrente Io entra nella bobina 1, azzerando la corrente nella bobina 2 e facendo uscire la corrente Io dalla bobina 3.
L'esterno della bobina 1 diventa il polo S e l'esterno della bobina 3 diventa il polo N. Durante la combinazione vettoriale, il campo magnetico generato è √3 (circa 1,72) volte quello di una singola bobina con corrente Io. Si ottiene così un campo magnetico composito con un angolo di 90° rispetto al campo del magnete permanente, che ruota in senso orario.
Quando la corrente di afflusso Io nella bobina 1 si riduce in base alla posizione di rotazione, la corrente di afflusso nella bobina 2 inizia ad aumentare da zero e la corrente di deflusso nella bobina 3 aumenta a Io, anche il campo magnetico composito ruota in senso orario e il magnete permanente continua a ruotare.
Assumendo che tutte le correnti di fase siano sinusoidali, la corrente in questo caso è Io×sin(π⁄3)=Io×√3⁄2. Grazie alla combinazione vettoriale del campo magnetico, la dimensione del campo magnetico totale è 1,5 volte il campo prodotto da una singola bobina ((√3⁄2)2×2=1,5). Quando tutte le correnti di fase sono sinusoidali, indipendentemente dalla posizione del magnete permanente, la dimensione del campo magnetico composito vettoriale è sempre 1,5 volte quella di una singola bobina e il campo magnetico forma un angolo di 90° con il campo magnetico del magnete permanente.
3) Dopo un'ulteriore rotazione di 30°, la corrente Io/2 fluisce nella bobina 1, la corrente Io/2 entra nella bobina 2 e la corrente Io esce dalla bobina 3.
L'esterno della bobina 1 diventa il polo S, l'esterno della bobina 2 si trasforma anch'esso in polo S e l'esterno della bobina 3 diventa il polo N. Durante la combinazione vettoriale, il campo magnetico generato è 1,5 volte il campo magnetico prodotto quando la corrente Io passa attraverso una singola bobina (come in ①). Anche qui si forma un campo magnetico composito con un angolo di 90° rispetto al campo del magnete permanente, che ruota in senso orario.
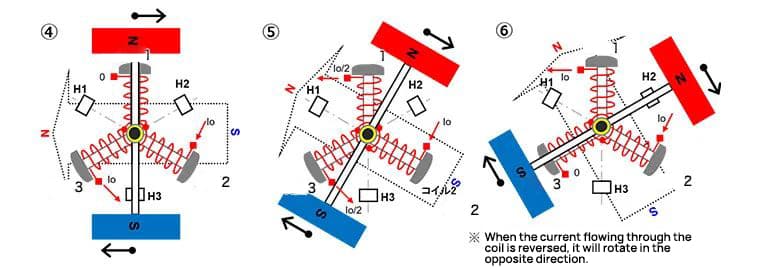
Passaggi da 4 a 6, ruotare nello stesso modo dei passaggi da 1 a 3.
In questo modo, commutando in sequenza la corrente che scorre nella bobina in base alla posizione del magnete permanente, quest'ultimo ruoterà in una direzione fissa. Allo stesso modo, se la corrente viene invertita e la direzione del campo magnetico sintetico viene invertita, il magnete permanente ruoterà in senso antiorario.
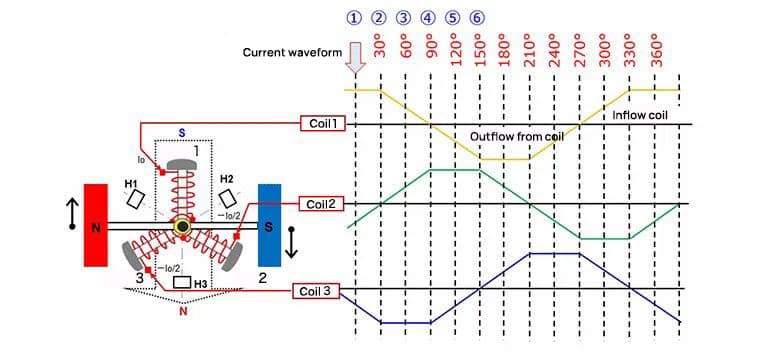
Il diagramma seguente mostra in modo continuo la corrente per ogni bobina in ciascuna delle fasi da 1 a 6 sopra citate. Da questa introduzione si può capire la relazione tra le variazioni di corrente e la rotazione.
Motore passo-passo
Il motore passo-passo è un tipo di motore che può sincronizzarsi accuratamente con segnali a impulsi per controllare gli angoli di rotazione e la velocità. È noto anche come "motore a impulsi".
Il motore passo-passo, che non richiede un sensore di posizione e può ottenere un posizionamento preciso tramite un controllo ad anello aperto, è ampiamente utilizzato nelle apparecchiature che richiedono una posizione precisa.
Struttura di un motore passo-passo (bipolare a due fasi)
Le immagini seguenti, da sinistra a destra, mostrano un esempio dell'aspetto esterno di un motore passo-passo, un semplice diagramma della sua struttura interna e uno schema concettuale del suo design.
Gli esempi esterni forniti riguardano i motori passo-passo di tipo HB (ibrido) e PM (a magneti permanenti). Anche i diagrammi centrali illustrano le strutture dei tipi HB e PM.
I motori passo-passo sono strutturati con bobine fisse e un magnete rotante. Il diagramma concettuale di destra della struttura interna del motore passo-passo illustra un esempio di motore PM che utilizza due fasi (due serie) di bobine. Negli esempi di struttura di base dei motori passo-passo, le bobine sono posizionate esternamente e il magnete permanente è situato internamente. Oltre a quelli bifase, esistono anche tipi con un numero maggiore di fasi, come quelli trifase e a cinque fasi.
Alcuni motori passo-passo hanno strutture distinte, ma per spiegare i loro principi di funzionamento, questo articolo fornisce la struttura di base dei motori passo-passo. Attraverso questo articolo, si intende comprendere che i motori passo-passo adottano principalmente una struttura con bobine fisse e un magnete permanente rotante.
Principio di funzionamento dei motori passo-passo (eccitazione monofase)
Il diagramma seguente serve a spiegare il principio di funzionamento di base dei motori passo-passo. Si tratta di un esempio di eccitazione monofase (una serie di bobine) delle bobine bipolari bipolari di cui sopra. La premessa del diagramma è il passaggio di stato da ① a ④. Le bobine sono costituite dalla Bobina 1 e dalla Bobina 2. Inoltre, la freccia della corrente rappresenta la direzione del flusso di corrente.
Dirigere la corrente in entrata dal lato sinistro della bobina 1 e in uscita dal lato destro. Evitare il passaggio di corrente attraverso la bobina 2. Di conseguenza, il lato interno della bobina sinistra 1 diventa N (nord), mentre il lato interno della bobina destra 1 diventa S (sud). Di conseguenza, il magnete permanente al centro viene attratto dal campo magnetico della bobina 1, assumendo uno stato con S a sinistra e N a destra, e si ferma.
Successivamente, si arresta la corrente nella bobina 1, facendola entrare dall'alto nella bobina 2 e uscire dal basso. Il lato interno della bobina superiore 2 diventa N, mentre il lato interno della bobina inferiore 2 diventa S. Il magnete permanente è attratto da questo campo magnetico, ruota di 90 gradi in senso orario e si ferma.
Successivamente, si arresta la corrente nella bobina 2, facendola entrare dal lato destro della bobina 1 e uscire dal lato sinistro. Il lato interno della bobina sinistra 1 diventa S, mentre il lato interno della bobina destra 1 diventa N. Il magnete permanente è nuovamente attratto da questo campo, ruota di altri 90 gradi in senso orario e si ferma.
Infine, si arresta la corrente nella bobina 1, facendola entrare dalla parte inferiore della bobina 2 e uscire dalla parte superiore. Il lato interno della bobina superiore 2 diventa S, mentre il lato interno della bobina inferiore 2 diventa N. Ancora una volta, il magnete permanente viene attratto da questo campo magnetico, ruotando di 90 gradi in senso orario e fermandosi.
Commutando il flusso di corrente attraverso le bobine nella sequenza sopra descritta (da ① a ④) mediante un circuito elettronico, è possibile far ruotare il motore passo-passo. In questo esempio, ogni azione di commutazione fa ruotare il motore passo-passo di 90 gradi.
Inoltre, il mantenimento di un flusso di corrente continuo attraverso una specifica bobina consente al motore di rimanere in stato di arresto mantenendo la coppia. Come nota a margine, l'inversione dell'ordine del flusso di corrente attraverso le bobine può far ruotare il motore passo-passo nella direzione opposta.
Non dimenticatevi che condividere è un'opera di carità! : )
Condividi
Facebook
Twitter
LinkedIn
Reddit
VK
Email
Stampa
Autore
Shane
Fondatore di MachineMFG
In qualità di fondatore di MachineMFG, ho dedicato oltre un decennio della mia carriera al settore della lavorazione dei metalli. La mia vasta esperienza mi ha permesso di diventare un esperto nei campi della fabbricazione di lamiere, della lavorazione, dell'ingegneria meccanica e delle macchine utensili per metalli. Penso, leggo e scrivo costantemente su questi argomenti, cercando di essere sempre all'avanguardia nel mio campo. Lasciate che le mie conoscenze e la mia esperienza siano una risorsa per la vostra azienda.
Vi siete mai chiesti cosa fa sì che un motore elettrico funzioni regolarmente senza surriscaldarsi? Conoscere le temperature di funzionamento sicure dei motori è fondamentale per la loro longevità e le loro prestazioni. In questo articolo,...
Vi siete mai chiesti come fanno i treni a fluttuare sui binari o come fanno i robot a realizzare movimenti precisi? Questo articolo svela l'affascinante mondo dei motori lineari, spiegandone i principi, i tipi e i vantaggi unici....
Vi siete mai chiesti perché il vostro motore elettrico a volte fatica ad avviarsi senza problemi? Correnti di avviamento elevate possono causare uno stress significativo sull'impianto elettrico, causando potenziali guasti e inefficienze. Questo articolo...
Come si determina il livello massimo di vibrazioni per i cuscinetti dei motori elettrici? Questa domanda cruciale riguarda sia i limiti operativi che i test post-installazione. L'articolo esplora le norme internazionali e nazionali...
Qualche giorno fa, un ingegnere ha chiesto informazioni sulla scelta dei lubrificanti per i cuscinetti. I produttori di lubrificanti avevano fornito una pletora di indicatori di prestazione, ma il significato di questi parametri...
La scelta dei cuscinetti giusti per i motori verticali comporta sfide uniche a causa delle differenze strutturali rispetto ai motori orizzontali. Il processo di selezione deve tenere conto dei carichi assiali e radiali, dei problemi di lubrificazione...
1. La distinzione tra stelo di spinta elettrico e cilindro elettrico Lo stelo di spinta elettrico e il cilindro elettrico sono generalmente definiti attuatori elettrici. Utilizzano un motore elettrico per azionare...
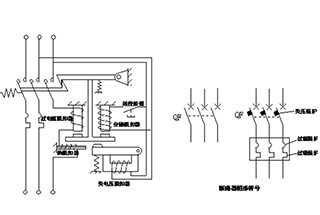
Vi siete mai chiesti cosa rende sicuro e affidabile l'impianto elettrico della vostra casa? Gli apparecchi elettrici a bassa tensione, come gli interruttori e i contattori, svolgono un ruolo cruciale in tal senso. Questo articolo illustra la...
Vi siete mai chiesti cosa distingue i motori a corrente continua da quelli a corrente alternata? In questo articolo esploriamo le differenze fondamentali tra questi due tipi di motori, compresi i loro principi di funzionamento,...