La guida definitiva agli encoder: Tipi, applicazioni e vantaggi
Vi siete mai chiesti come fanno le macchine a conoscere con precisione la loro posizione e la loro velocità? Questo articolo esplora l'affascinante mondo degli encoder, sensori fondamentali per rilevare il movimento meccanico. Imparerete a conoscere i diversi tipi di encoder, i loro principi di funzionamento e le loro applicazioni nei macchinari moderni. Preparatevi a scoprire i segreti della precisione dei controlli dei motori e non solo!
Gli encoder sono un tipo di sensore utilizzato principalmente per rilevare la velocità, la posizione, l'angolo, la distanza o il numero di movimenti meccanici.
Oltre a essere utilizzati nei macchinari, molti controlli del motore, come i servomotori, necessitano di encoder per fornire un feedback per la commutazione, la velocità e il rilevamento della posizione al controllore del motore.
2. Classificazione degli encoder
L'encoder può essere suddiviso in encoder analogico e encoder digitale. L'encoder analogico può essere ulteriormente suddiviso in trasformatore rotante ed encoder Sin/Cos, mentre l'encoder digitale può essere suddiviso in encoder incrementale ed encoder assoluto.
3. Principi di funzionamento degli encoder comunemente utilizzati
3.1 Principio degli encoder digitali
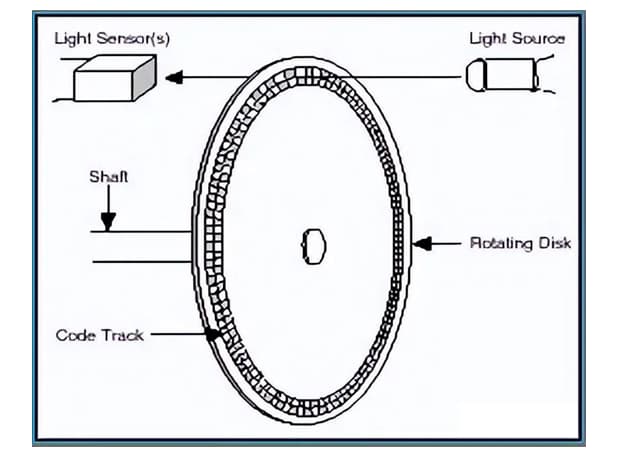
1)Utilizzare accoppiatori fotoelettrici per scansionare un disco segmentato installato su un albero meccanico.
Il codice meccanico viene convertito in segnali di impulsi elettrici proporzionali.
La sorgente luminosa (generalmente un LED) emette un fascio di luce stretto verso il ricevitore (che può essere un fotodiodo). Sia la sorgente luminosa che il ricevitore sono rigorosamente installati in parti fisse del cuscinetto di collegamento rotante.
L'encoder è un disco ombreggiante con un'apertura o finestra trasparente, installato nella parte rotante del cuscinetto.
3.2 Principio degli encoder digitali fotoelettrici
Quando il cuscinetto ruota, l'encoder permette al fascio di luce di alternarsi (passare attraverso la piccola finestra sul disco).
Il fotodiodo emette i corrispondenti segnali di livello alto o basso al variare della posizione. L'uscita del fotodiodo può essere convertita in informazioni sulla posizione e sulla velocità attraverso un circuito specializzato.
3.2.1 Uscita degli encoder incrementali
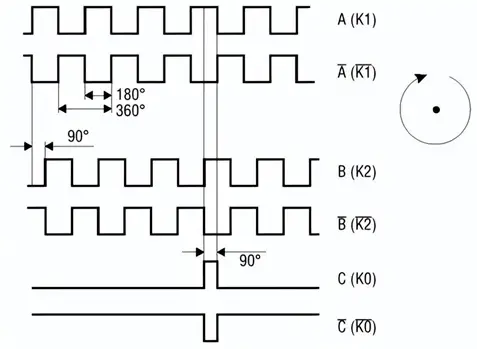
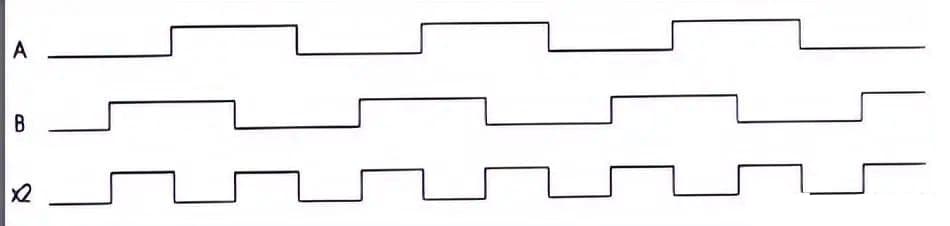
L'uscita dell'encoder incrementale è costituita da un disco fotoelettrico ad asse centrale con marcature circolari trasparenti e opache, che vengono lette da componenti fotoelettrici emettitori e ricevitori per ottenere segnali a onda quadra combinati come A, B, -A, -B.
Ogni coppia di segnali ha una differenza di fase di 90 gradi C (un ciclo equivale a 360 gradi).
Inoltre, è presente un segnale di calibrazione del punto zero e l'encoder emette un segnale per ogni rotazione del disco.
Schema di uscita dell'encoder incrementale
3.2.2 Principi di connessione degli encoder incrementali
1. Collegamento monofase
Utilizzato per il conteggio monodirezionale e la misurazione unidirezionale della velocità.
2. Collegamento bifase A-B
Utilizzato per il conteggio bidirezionale e la determinazione della direzione e della velocità.
3. Collegamento trifase A-B-C
Utilizzato per determinare la velocità con correzione della posizione di riferimento.
Il collegamento A-A-B-B-C-C è caratterizzato da una corrente di collegamento simmetrica negativa del segnale, che presenta un'attenuazione minima e una forte anti-interferenza e può essere emesso su lunghe distanze.
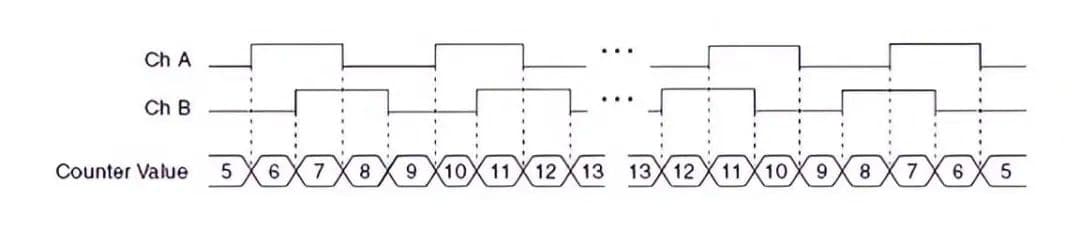
Come determinare la direzione
Poiché A e B sono sfasati di 90 gradi, la direzione può essere determinata rilevando se A o B si verifica per primo.
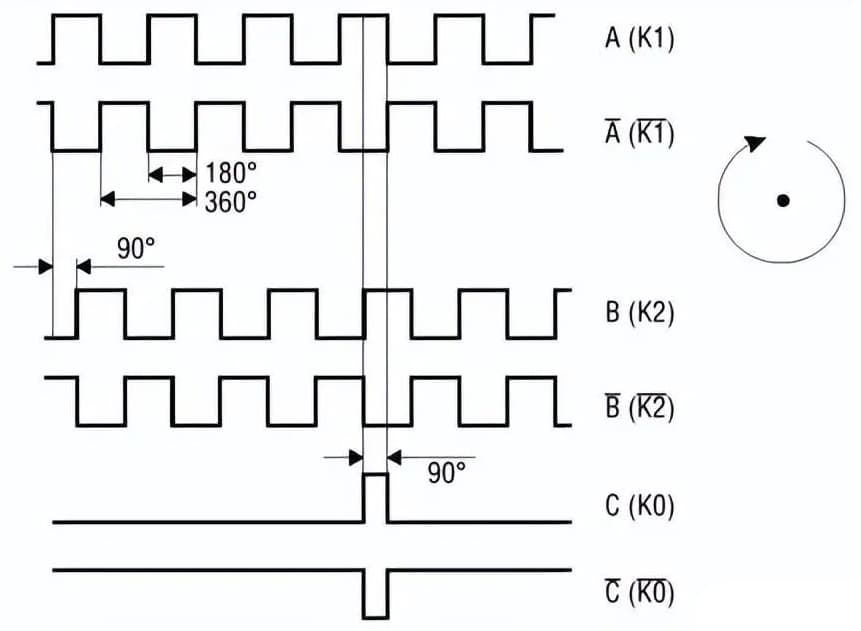
Come eseguire la calibrazione della posizione di zero
Durante la trasmissione degli impulsi dell'encoder, possono verificarsi errori dovuti a motivi quali le interferenze, con conseguenti errori di trasmissione.
A questo punto, è necessario eseguire una calibrazione tempestiva della posizione di zero.
L'encoder C emette un impulso a ogni rotazione, detto impulso di zero o di identificazione, che viene utilizzato per determinare la posizione di zero o di identificazione.
Per misurare con precisione l'impulso di zero, indipendentemente dal senso di rotazione, l'impulso di zero viene emesso come combinazione ad alto livello di due canali.
A causa della differenza di fase tra i canali, l'impulso di zero è lungo solo la metà dell'impulso.
Schema della correzione del punto zero
3.2.3 Moltiplicatore di encoder incrementali
A causa delle limitazioni tecnologiche e di campionamento, è impossibile ottenere una divisione fisica più fine e precisa del disco di codifica.
Tuttavia, è possibile ottenere impulsi più elevati attraverso la conversione dei circuiti digitali.
Segnale a doppia frequenza
Ottenuto dalla conversione "esclusiva o" delle fasi A e B.
Segnale a quadrupla frequenza
Il contatore aumenta o diminuisce anche su ciascun bordo dei canali A e B. La direzione del contatore è determinata da quale canale precede l'altro.
Il numero nel contatore aumenta o diminuisce di 4 ad ogni ciclo.
3.2.4 Caratteristiche degli encoder incrementali
L'encoder emette un segnale a impulsi per ogni angolo di rotazione preimpostato e l'angolo di rotazione viene calcolato contando il numero di segnali a impulsi.
Pertanto, i dati di posizione emessi dall'encoder sono relativi.
Poiché viene utilizzato un segnale a impulsi fisso, la posizione iniziale dell'angolo di rotazione può essere impostata arbitrariamente.
A causa dell'uso della codifica relativa, i dati dell'angolo di rotazione andranno persi e dovranno essere ripristinati dopo un'interruzione di corrente.
3.2.5 Problemi con gli encoder incrementali
1) Gli encoder incrementali hanno errori cumulativi a punto zero.
2) Hanno una scarsa capacità anti-interferenza.
3) Il dispositivo ricevente deve essere spento e la posizione di riferimento deve essere ritrovata dopo interruzioni di corrente o arresti.
L'avvento degli encoder assoluti risolve questi problemi.
3.3 Principio dell'encoder assoluto
Un encoder assoluto ha un disco di codice luminoso con diversi canali luminosi e linee incise su di esso.
Ogni canale viene codificato utilizzando in sequenza 2, 4, 8, 16 e così via.
A ogni posizione dell'encoder, i canali luminosi vengono letti e il loro stato di accensione/spegnimento viene utilizzato per ottenere un codice binario univoco, noto come codice Gray, compreso tra 2^0 e 2^(n-1), dove n è il numero di bit dell'encoder assoluto.
La posizione dell'encoder è determinata meccanicamente dal disco del codice luminoso, quindi non è influenzata da interruzioni di corrente o interferenze.
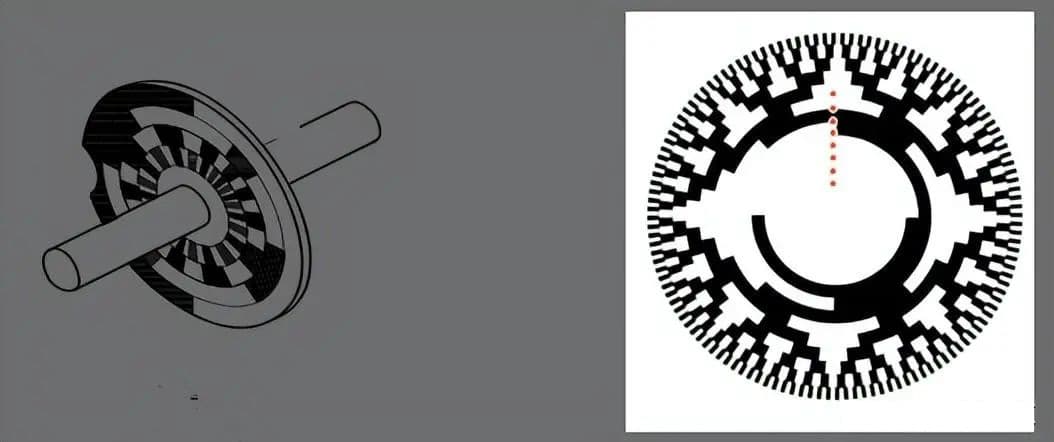
3.3.1 Disco codice dell'encoder assoluto
Il disco di codici luminosi viene scansionato da un gruppo di accoppiatori fotoelettrici per ottenere il codice univoco in ogni posizione. Ogni posizione ha un proprio codice univoco.
I numeri interi adiacenti nella rappresentazione numerica hanno una sola differenza, il che può evitare il verificarsi di grandi picchi di corrente nel circuito di conversione digitale (come 3-4, 0011-0100).
Formato di conversione codice binario-grigio:
Le cifre più alte vengono conservate e la seconda cifra più alta si ottiene eseguendo un'operazione di "or esclusivo" sulle cifre più alte e sulla seconda cifra più alta (in binario).
Riferimento per i codici decimali e grigi.
Decimale
Codice grigio
0
0000
1
0001
2
0011
3
0010
4
0110
5
0111
6
0101
7
0100
Decimale
Codice grigio
8
1100
9
1101
10
1111
11
1110
12
1010
13
1011
14
1001
15
1000
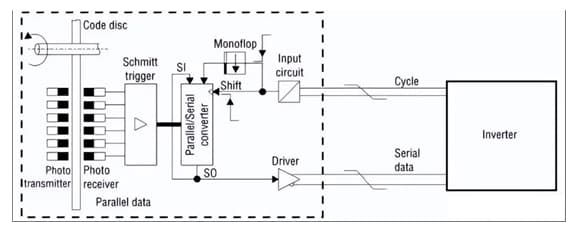
3.3.2 Formati di uscita degli encoder assoluti
1. Modalità di uscita in parallelo
In questa modalità, c'è un cavo per ogni bit di dati (canale di bit) e il livello del segnale (alto o basso) su ciascun cavo rappresenta un 1 o uno 0.
Il dispositivo fisico è simile a un encoder incrementale e presenta diverse tipologie, quali collettore aperto PNP, NPN, azionamento differenziale, push-pull e differenziale alto o basso effettivo in base al formato del dispositivo fisico.
L'uscita parallela è generalmente sotto forma di codice Gray, chiamato anche codificatore di codice Gray.
2. Uscita dell'interfaccia seriale sincrona (SSI)
In questa modalità, i dati vengono concentrati e trasmessi attraverso un gruppo di cavi. L'uscita dei dati è ordinata da un protocollo di comunicazione che ne specifica la tempistica.
L'uscita seriale utilizza un minor numero di linee di connessione e può trasmettere su distanze maggiori, migliorando notevolmente la protezione e l'affidabilità dell'encoder.
Gli encoder assoluti ad alto bit e gli encoder assoluti multigiro utilizzano solitamente l'uscita seriale.
3. Formato seriale asincrono
In questa modalità, le istruzioni e i dati vengono scambiati attraverso domande e risposte e l'interfaccia è duplex. Un esempio tipico è l'interfaccia RS485, che richiede solo due cavi.
Il contenuto dei dati può essere il valore di posizione dell'encoder o altri contenuti richiesti dall'istruzione.
Ad esempio, se si aggiunge un indirizzo per ogni encoder, più encoder possono condividere il cavo di trasmissione e la successiva ricezione. Questa forma è chiamata tipo fieldbus.
4. Principio del codificatore ibrido
La codifica incrementale e la codifica assoluta sono integrate nello stesso disco.
Il cerchio più esterno del disco contiene strisce incrementali ad alta densità, mentre la parte centrale è il canale del codice Gray binario dell'encoder assoluto.
La rotazione del disco è indicata dal conteggio del numero di impulsi per rotazione, mentre l'angolo girato in una settimana viene conteggiato utilizzando il valore numerico del codice Gray.
Encoder assoluto multigiro: basato sull'encoder assoluto monogiro, il principio del meccanismo di ingranaggi a orologio viene utilizzato per trasmettere la rotazione del disco centrale a un altro set di dischi (o a più set di ingranaggi e dischi) attraverso la trasmissione a ingranaggi, che aggiunge la codifica del numero di giri sulla base della codifica monogiro per ampliare il campo di misura dell'encoder.
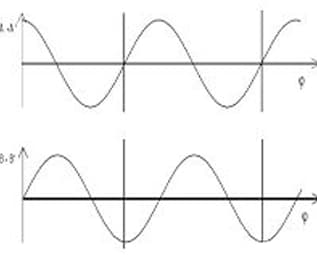
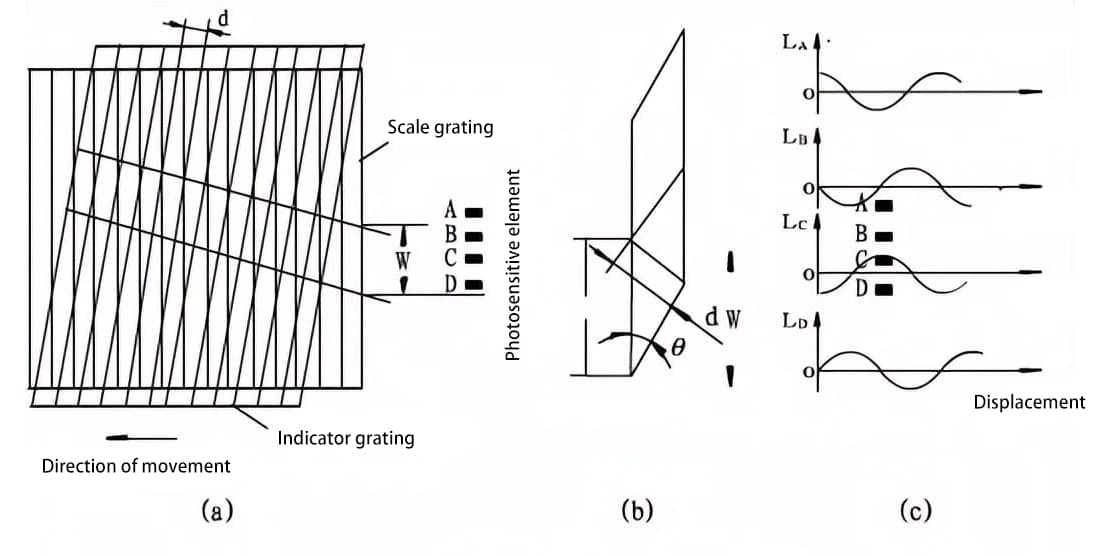
Quando la luce parallela passa attraverso una griglia, l'intensità delle frange di Moiré prodotte si approssima a una funzione coseno.
Posizionando quattro frange Moiré da 1/4 di elementi fotosensibili nella direzione del movimento delle frange Moiré, è possibile ottenere quattro serie di segnali di uscita sinusoidali e coseno.
Forma di uscita dell'encoder seno-coseno
Figura Principio di funzionamento del reticolo
Encoder lineare
Un encoder lineare misura la distanza di spostamento lineare di un oggetto e converte la distanza misurata in un segnale elettrico a impulsi.
In termini semplici, il principio consiste nell'allungare il disco di un encoder rotativo in una linea retta.
Encoder a scala di griglie
Il principio di funzionamento del sensore di spostamento a reticolo è che quando il reticolo principale (cioè il reticolo graduato) e il reticolo ausiliario (cioè il reticolo indicatore) della coppia di reticoli sono relativamente spostati, l'interferenza e la diffrazione della luce producono un disegno regolare a strisce in bianco e nero (o chiaro-scuro), chiamato frangia di Moiré.
Le strisce bianche e nere (o chiare e scure) uguali vengono convertite in segnali elettrici a variazione sinusoidale attraverso dispositivi fotoelettrici.
Dopo l'amplificazione e il modellamento da parte dei circuiti di modellazione, si ottengono due segnali a onda sinusoidale o quadra con una differenza di fase di 90 gradi, che vengono inviati al display digitale a griglia per il conteggio e la visualizzazione.
Trasformatore rotante
Un trasformatore rotante, noto anche come resolver, è un tipo di micromotore utilizzato per scopi di controllo.
Si tratta di un dispositivo di misurazione indiretta che converte la rotazione meccanica in un segnale elettrico correlato all'angolo di rotazione mediante una determinata funzione matematica.
Principio del trasformatore rotante
1. Un trasformatore rotante è un componente di segnale che emette una tensione che varia con l'angolo del rotore.
Quando l'avvolgimento di eccitazione è eccitato da una tensione alternata di una certa frequenza, l'ampiezza della tensione dell'avvolgimento di uscita è in una relazione di funzione seno o coseno con l'angolo del rotore, o mantiene una certa relazione proporzionale, o ha una relazione lineare con l'angolo del rotore entro un certo intervallo.
2. La distribuzione del flusso magnetico tra lo statore e il rotore del trasformatore rotante segue la regola del seno.
Pertanto, quando la tensione di eccitazione viene applicata all'avvolgimento di statore, l'avvolgimento di rotore genera una forza elettromotrice indotta attraverso l'accoppiamento elettromagnetico, come mostrato nella figura precedente.
L'entità della tensione di uscita dipende dalla posizione angolare del rotore e varia quindi in modo sinusoidale con lo spostamento del rotore.
Secondo il principio del trasformatore, supponendo che il numero di spire dell'avvolgimento primario sia N1 e il numero di spire dell'avvolgimento secondario sia N2, k = N1 / N2 è il rapporto di spire. Quando una tensione alternata viene applicata all'avvolgimento primario
Applicazione del trasformatore rotante
1. Modalità di rilevamento della fase
L'angolo di fase della tensione indotta è uguale all'angolo di rotazione meccanica del rotore.
Pertanto, se viene rilevato l'angolo di fase della tensione di uscita del rotore, l'angolo di rotazione del rotore è noto.
2. Modalità di rilevamento dell'ampiezza
Nelle applicazioni pratiche, modificando continuamente l'angolo elettrico della tensione di modulazione, è possibile seguire la variazione dell'angolo meccanico e misurare l'ampiezza della tensione indotta per ottenere lo spostamento dell'angolo meccanico.
5. Precauzioni per l'installazione degli encoder
Aspetti meccanici:
1. Durante l'installazione, prestare attenzione al carico ammissibile sull'albero;
2. Assicurarsi che la differenza d'asse tra l'albero dell'encoder e l'utente albero di uscita è inferiore a 0,20 mm e l'angolo di deviazione dall'asse è inferiore a 1,5°;
3. Durante l'installazione, evitare urti, cadute e collisioni per evitare danni all'albero e al disco;
4. In caso di utilizzo prolungato, controllare regolarmente se le viti di fissaggio dell'encoder sono allentate (una volta al trimestre).
Aspetti elettrici:
1)Il filo di messa a terra deve essere il più spesso possibile, generalmente superiore a 1,5 millimetri quadrati;
2)I fili di uscita dell'encoder non devono sovrapporsi l'uno all'altro per evitare danni al circuito di uscita;
3)I fili di segnale dell'encoder non devono essere collegati all'alimentazione CC o alla corrente CA per evitare di danneggiare il circuito di uscita;
4)Le apparecchiature, come i motori, collegate all'encoder devono essere ben collegate a terra e prive di elettricità statica.
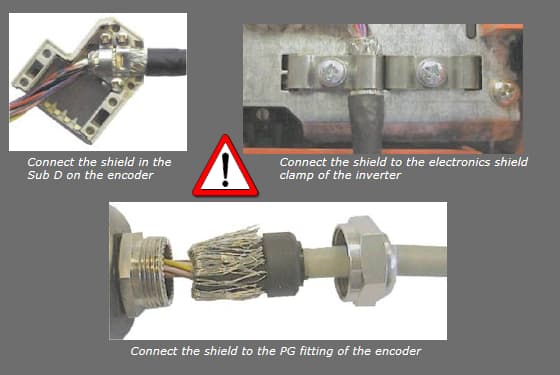
6. Installazione del cavo di schermatura dell'encoder.
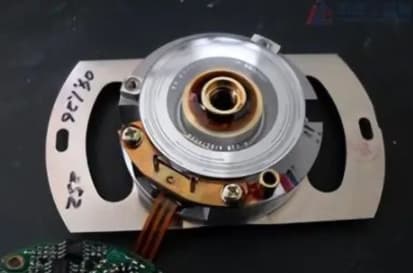
Schema della struttura interna di un encoder rotativo.
Non dimenticatevi che condividere è un'opera di carità! : )
Condividi
Facebook
Twitter
LinkedIn
Reddit
VK
Email
Stampa
Autore
Shane
Fondatore di MachineMFG
In qualità di fondatore di MachineMFG, ho dedicato oltre un decennio della mia carriera al settore della lavorazione dei metalli. La mia vasta esperienza mi ha permesso di diventare un esperto nei campi della fabbricazione di lamiere, della lavorazione, dell'ingegneria meccanica e delle macchine utensili per metalli. Penso, leggo e scrivo costantemente su questi argomenti, cercando di essere sempre all'avanguardia nel mio campo. Lasciate che le mie conoscenze e la mia esperienza siano una risorsa per la vostra azienda.
Immaginate di sbloccare la precisione delle macchine utensili con una semplice superficie di vetro. Le righe a reticolo lineare fanno proprio questo, trasformando le linee sottili in misure estremamente precise. Questo articolo analizza come queste...
Vi siete mai chiesti come si smussano gli spigoli delle parti metalliche? Questo processo, noto come smussatura, trasforma gli angoli pericolosi e frastagliati in superfici angolate più sicure. In questo articolo...
Vi siete mai chiesti quali siano i migliori marchi di cuscinetti al mondo? In questo post esploreremo i principali produttori di cuscinetti noti per la loro eccezionale qualità, innovazione e...
Vi siete mai chiesti chi alimenta il mondo dietro le quinte? In questo post del blog, faremo un'immersione profonda nei principali produttori di generatori che tengono accese le luci...
Siete aspiranti ingegneri meccanici e volete eccellere nel vostro campo? In questo post esploreremo i 10 software di progettazione meccanica più importanti che possono elevare la vostra...
Vi siete mai chiesti come viene garantita l'integrità dei dadi e delle viti saldati nella vostra auto? Questo articolo svela il meticoloso processo di controlli e ispezioni di qualità che mantengono il vostro veicolo...
Vi siete mai chiesti cosa fa sì che un motore elettrico funzioni regolarmente senza surriscaldarsi? Conoscere le temperature di funzionamento sicure dei motori è fondamentale per la loro longevità e le loro prestazioni. In questo articolo,...
Vi siete mai interrogati sull'affascinante mondo della fusione? Questo processo produttivo, antico ma in continua evoluzione, dà forma alla nostra vita quotidiana in innumerevoli modi. In questo post esploreremo il...
Vi siete mai chiesti come fanno gli ingranaggi della vostra auto o del vostro aereo a funzionare così bene? Questo articolo svela i principali produttori di ingranaggi che stanno dando forma al futuro dell'ingegneria meccanica. Imparerete...