Motori elettrici: Tipi, strutture e analisi delle prestazioni
Cosa alimenta il vostro veicolo elettrico? Dai motori asincroni a corrente alternata ai motori sincroni a magneti permanenti, fino ai motori a riluttanza commutata, ogni tipo offre vantaggi e svantaggi unici. Questo articolo esplora le strutture, i principi e le applicazioni di questi tipi di motori chiave, aiutandovi a capire come influiscono sulle prestazioni e sull'efficienza dei veicoli elettrici. Immergetevi per scoprire quale motore potrebbe guidare il vostro prossimo veicolo!
Sulla base dei requisiti prestazionali fondamentali del motore di trazione per i veicoli a nuova energia, i tipi di motori di trazione comunemente utilizzati sono suddivisi in tre categorie principali: Motori asincroni a corrente alternata, motori sincroni a magneti permanenti e motori a riluttanza commutata.
Attualmente, ogni modello di auto equipaggiato da varie case automobilistiche utilizza diversi tipi di motori di trazione.
Pertanto, per scegliere il tipo di motore per un veicolo a nuova energia, è importante comprendere la struttura, il principio di funzionamento, i vantaggi e gli svantaggi del motore di trazione.
I. Motore asincrono CA
1. Struttura del motore asincrono CA
Il motore asincrono in c.a., noto anche come motore a induzione, è costituito principalmente da statore, rotore, albero motore, cuscinetti anteriori e posteriori, coperchio terminale, sensore di posizione, sensore di temperatura, cablaggio a bassa tensione e cablaggio di alimentazione ad alta tensione.
Lo statore è costituito dal nucleo di ferro dello statore e dall'avvolgimento trifase; il rotore utilizza spesso un rotore a gabbia di scoiattolo, che comprende il nucleo di ferro del rotore e l'avvolgimento a gabbia di scoiattolo.
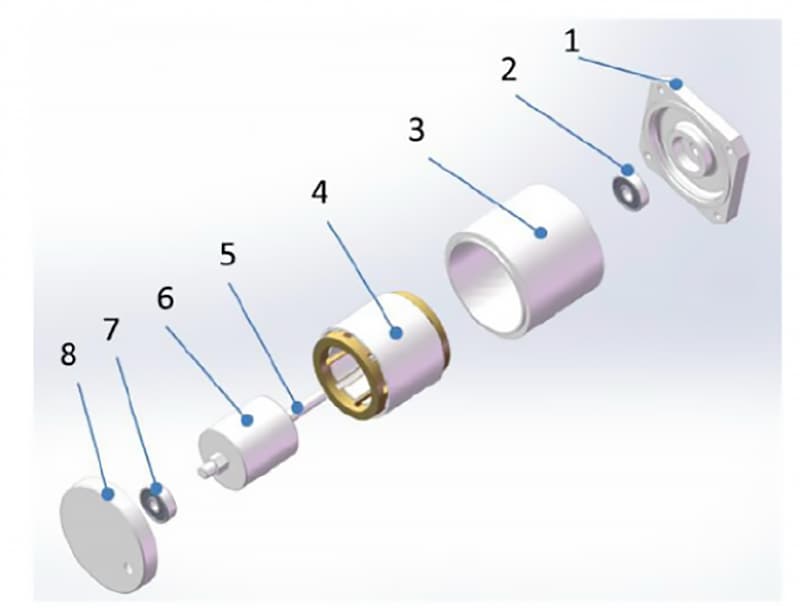
A seconda della potenza del motore, si può scegliere tra il raffreddamento ad acqua o ad aria. (Figura 1)
Figura 1 Schema strutturale del motore asincrono in c.a.
1- Coperchio anteriore 2- Cuscinetto anteriore 3- Alloggiamento del motore 4- Rotore a gabbia di scoiattolo 5- Albero motore 6- Statore 7- Cuscinetto posteriore 8- Coperchio posteriore 9- Sensore di posizione 10- Coperchio di manutenzione del sensore
2. Principio di funzionamento del motore asincrono CA
(1) Principio di funzionamento dell'azionamento del motore asincrono in c.a.
1) Lo statore fornisce un campo magnetico rotante. Per fornire la coppia, il motore asincrono CA deve far passare l'alimentazione CA trifase attraverso la bobina dello statore, creando un campo magnetico rotante continuo (con una velocità di rotazione del campo magnetico pari a ns).
Il motore asincrono CA richiede che gli avvolgimenti trifase dello statore siano simmetrici e che il nucleo di ferro dello statore sia distanziato di 120 gradi elettrici. Anche la corrente che attraversa gli avvolgimenti trifase simmetrici deve essere simmetrica, con la stessa dimensione, frequenza e differenza di fase di 120 gradi. La velocità di rotazione del campo magnetico rotante è data dall'equazione (1).
ns=60f/p (1)
In questa equazione, ns è la velocità di rotazione del campo magnetico rotante (nota anche come velocità sincrona), r/min; f è la frequenza della corrente alternata trifase, Hz; p è il numero di coppie di poli.
Per un motore progettato e messo in produzione, il numero di coppie di poli è fisso, quindi il fattore che determina la velocità di rotazione del campo magnetico è la frequenza della corrente alternata trifase. Poiché la frequenza della rete elettrica nel nostro Paese è f=50Hz, esiste una relazione lineare tra la velocità del motore e il numero di coppie di poli. (Figura 2)
Figura 2 Diagramma del campo magnetico rotante degli avvolgimenti di statore a due poli
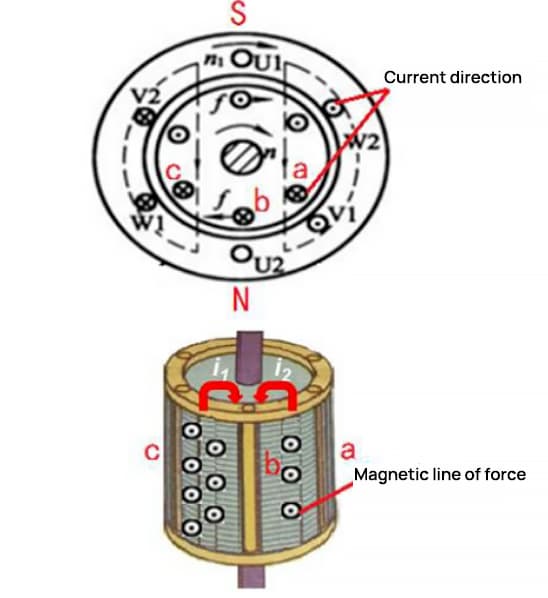
2) Il rotore a gabbia di scoiattolo genera correnti parassite indotte. Quando lo statore fornisce un campo magnetico rotante, sul conduttore del rotore a gabbia di scoiattolo viene indotta una corrente parassita, come illustrato nella Figura 3.
Figura 3 Corrente parassita negli avvolgimenti del rotore a gabbia
Nell'area magnetica tra i conduttori c e b dell'avvolgimento a gabbia di scoiattolo sono presenti linee di forza magnetica verso l'esterno, che vengono potenziate dall'azione del campo magnetico rotante.
Pertanto, sui conduttori c e b verrà indotta una corrente parassita i1; analogamente, l'indebolimento delle linee di forza magnetiche nell'area tra il conduttore a e il conduttore b indurrà una corrente parassita i2 sul conduttore.
La corrente sul conduttore b, sotto l'azione del campo magnetico rotante dello statore, farà sì che il conduttore b dell'avvolgimento a gabbia di scoiattolo sia soggetto a una forza elettromagnetica, facendo sì che il rotore generi una coppia elettromagnetica e inizi a ruotare. Il rotore rotante si avvicina gradualmente al campo magnetico rotante, ruotando a una velocità n leggermente inferiore alla "velocità sincrona ns" del campo magnetico.
Questo fenomeno, in cui la velocità di rotazione n del rotore è leggermente inferiore alla velocità ns del campo magnetico dello statore, è chiamato slittamento del rotore. Questo slittamento asincrono consente al conduttore del rotore a gabbia di scoiattolo di tagliare continuamente le linee di forza magnetiche, producendo correnti parassite indotte.
Di conseguenza, sul rotore, l'energia elettrica viene convertita in energia meccanica, garantendo un'uscita esterna continua.
(2) Il principio della generazione di potenza nei motori asincroni in c.a.
Secondo la legge di Faraday sull'induzione elettromagnetica, quando una sezione del conduttore del circuito chiuso attraversa le linee del campo magnetico in movimento, si genera una corrente indotta all'interno del conduttore, con la forza elettromotrice generata nota come forza elettromotrice indotta.
In un motore asincrono in corrente alternata, quando il motore viene utilizzato come generatore, lo statore viene eccitato con una corrente trifase per fornire il campo magnetico e l'avvolgimento del rotore fornisce il conduttore.
Quando una forza meccanica esterna, come l'albero motore di un'automobile, aziona l'albero del rotore, facendolo muovere, se la velocità del rotore è superiore alla velocità sincrona del campo magnetico rotante dello statore, il motore asincrono CA si comporta come un generatore.
La direzione del rotore che taglia il campo magnetico rotante è opposta a quella del motore di azionamento, quindi anche la direzione della forza elettromotrice indotta dal rotore è invertita.
Durante il processo di generazione dell'energia, il rotore del motore subisce una coppia elettromagnetica opposta alla forza di trascinamento esterna, causando una diminuzione della velocità del rotore.
3. Vantaggi, svantaggi e applicazioni dei motori asincroni in c.a.
I motori asincroni a corrente alternata eccellono nel fornire una coppia di uscita regolabile in un ampio intervallo, in grado di aumentare forzatamente la coppia di uscita per brevi periodi durante l'accelerazione o la salita. I veicoli elettrici azionati da motori sincroni a magneti permanenti spesso impiegano meccanismi di trasmissione aggiuntivi per aumentare la coppia per incrementare la velocità.
Tuttavia, i motori asincroni a corrente alternata presentano diversi svantaggi. A causa dell'eccitazione unilaterale, richiedono correnti di avviamento maggiori e più corrente per unità di coppia prodotta. Lo statore ospita correnti di eccitazione reattive, che comportano un consumo energetico maggiore rispetto ai motori sincroni a magneti permanenti, con un fattore di potenza in ritardo.
Le condizioni di sovraccarico si verificano spesso durante gli azionamenti per impieghi gravosi. La loro struttura relativamente complessa richiede un'elevata competenza in materia di tecnologia di controllo, il che rende la loro produzione più costosa, e la loro densità di potenza è relativamente inferiore.
Attualmente, i motori asincroni a corrente alternata sono comunemente utilizzati come motori di trazione nei veicoli elettrici sviluppati negli Stati Uniti.
II. Motore sincrono a magnete permanente
1. Struttura del motore sincrono a magneti permanenti
La struttura di un motore sincrono a magneti permanenti comprende statore, rotore, albero motore, cuscinetti anteriori e posteriori, calotta terminale, canale di raffreddamento dell'acqua, sensore di posizione, sensore di temperatura, cablaggio a bassa tensione e cablaggio di potenza.
Lo statore è formato dal nucleo di ferro dello statore e dagli avvolgimenti trifase; il rotore è costituito da poli di magneti permanenti e da un nucleo di ferro, con il nucleo di ferro costituito da un'armatura impilata. lamiere in acciaio al silicio.
La disposizione dei magneti permanenti nel rotore comprende principalmente rotori a magneti permanenti montati in superficie, incorporati in superficie e interni, con rotori a magneti permanenti interni comunemente utilizzati nei motori a nuova energia. (Figura 4)
1- Coperchio anteriore 2- Cuscinetto anteriore 3- Alloggiamento del motore 4- Statore 5- Albero motore 6- Rotore a magnete permanente integrato 7- Cuscinetto posteriore 8- Coperchio posteriore (sensore di posizione incorporato)
2. Principio di funzionamento del motore sincrono a magnete permanente
(1) Principio di funzionamento del motore sincrono a magneti permanenti
Il campo magnetico rotante è fornito dallo statore, prodotto allo stesso modo e alla stessa velocità di un motore asincrono a corrente alternata. I poli magnetici sono forniti dai magneti permanenti del rotore.
In questo modo, il campo magnetico rotante generato dallo statore forma un circuito con i poli del magnete permanente e il nucleo di ferro del rotore. In base al principio della minima riluttanza magnetica, secondo cui il flusso magnetico si chiude sempre lungo il percorso di minor resistenza magnetica, il rotore viene trascinato in rotazione dalla forza elettromagnetica del campo rotante.
Di conseguenza, il rotore a magneti permanenti ruota in modo sincrono con il campo magnetico rotante generato dallo statore, azionando così la rotazione dell'albero motore.
(2) Principio di generazione di potenza del motore sincrono a magneti permanenti
In base alla legge di Faraday sull'induzione elettromagnetica, una parte del conduttore del circuito chiuso è fornita dagli avvolgimenti trifase dello statore, mentre il campo magnetico è fornito dai magneti permanenti del rotore.
Quando la coppia esterna fa ruotare il rotore, questo genera un campo magnetico rotante che taglia parte dei conduttori degli avvolgimenti trifase dello statore e induce una corrente trifase simmetrica.
A questo punto, l'energia cinetica del rotore viene convertita in energia elettrica e il motore sincrono a magneti permanenti funziona come un generatore.
3. Vantaggi, svantaggi e campo di applicazione del motore sincrono a magneti permanenti
I vantaggi di un motore sincrono a magneti permanenti sono le dimensioni ridotte, la leggerezza, l'elevata densità di potenza, il minor consumo energetico, il minor aumento di temperatura e la maggiore efficienza rispetto ai motori asincroni.
Può essere progettato come motore strutturato con una coppia di avviamento elevata e una capacità di sovraccarico elevata in base alle esigenze.
Il motore sincrono a magneti permanenti si sincronizza rigorosamente e ha buone prestazioni di risposta dinamica, adatte al controllo della frequenza; la coppia e la velocità del motore possono essere regolate in un ampio intervallo modificando la corrente e la frequenza.
Tuttavia, il materiale del magnete permanente utilizzato nei motori sincroni a magneti permanenti è solitamente un materiale magnetico forte al neodimio, ferro e boro, che è relativamente fragile e può rompersi in caso di vibrazioni intense.
Inoltre, l'uso di materiale a magneti permanenti nel rotore può portare a un decadimento magnetico nel funzionamento del motore e a situazioni di surriscaldamento, con conseguente diminuzione della potenza.
Attualmente, i motori sincroni a magneti permanenti sono ampiamente utilizzati nei motori dei veicoli a nuova energia, con i mercati a nuova energia in Asia e in Europa che utilizzano principalmente i motori sincroni a magneti permanenti come motori a nuova energia.
III. Motore a riluttanza commutata
1. Struttura del motore a riluttanza commutata
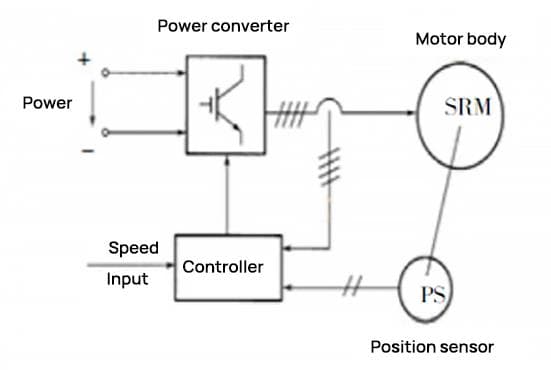
Il motore a riluttanza commutata (SRM) è un tipico motore meccatronico, noto anche come "sistema di azionamento a riluttanza commutata". Il motore comprende principalmente quattro componenti: l'SRM stesso, un convertitore di potenza, i sensori di posizione del rotore e un controllore, come mostrato nella Figura 5.
Figura 5 Schema a blocchi del sistema del motore a riluttanza commutato
La struttura principale dell'SRM comprende lo statore, il rotore, i sensori di posizione, i cuscinetti anteriori e posteriori, le testate anteriori e posteriori e la carcassa del motore, come illustrato nella Figura 6. Lo statore comprende il nucleo dello statore e gli avvolgimenti.
Figura 6 Struttura del motore a riluttanza commutato
1- Coperchio anteriore 2- Cuscinetto anteriore 3- Rotore 4- Albero motore 5- Statore 6- Alloggiamento del motore 7- Cuscinetto posteriore 8- Coperchio posteriore 9- Sensore di posizione 10- Coperchio di manutenzione del sensore 11- Ventola di raffreddamento 12- Coperchio terminale del ventilatore
Sia il nucleo dello statore che il rotore utilizzano strutture a poli salienti e sono costituiti da fogli di acciaio al silicio laminati. I poli salienti dello statore sono dotati di avvolgimenti, mentre il rotore non ha avvolgimenti né magneti permanenti.
La struttura trifase a 6/4 poli indica che lo statore del motore ha sei poli salienti e il rotore ha quattro poli salienti. Gli avvolgimenti concentrati su due poli salienti simmetrici dello statore sono cablati in serie per formare una fase e il numero di fasi è uguale al numero di poli salienti dello statore diviso per due, come mostrato nella Figura 7(a).
Figura 7 Struttura del polo saliente e dell'avvolgimento del motore a riluttanza commutata
La struttura trifase a 12/8 poli indica che lo statore del motore ha dodici poli salienti e il rotore ha otto poli salienti. Gli avvolgimenti su quattro poli salienti simmetrici dello statore sono cablati in serie per formare una fase e il numero di fasi è uguale al numero di poli salienti dello statore diviso per quattro, come mostrato nella Figura 7(b).
Più fasi ha un motore a riluttanza commutata, più piccolo è l'angolo di passo, più fluido è il funzionamento e più favorevole è la riduzione del ripple di coppia. Tuttavia, il controllo diventa più complesso, con conseguente aumento del numero di dispositivi di commutazione principali e dei costi.
Il calcolo per l'angolo di passo è mostrato nell'equazione (2):
α = 360° × (Numero di poli dello statore - Numero di poli del rotore) / (Numero di poli dello statore)
Ad esempio, per un motore trifase a 6/4 poli, l'angolo di passo α = 360° × 2/(6×4) = 30°.
2. Principio di funzionamento del motore a riluttanza commutato
(1) Principio di funzionamento del motore a riluttanza commutato
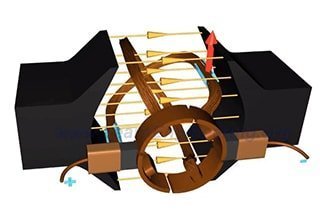
Come mostrato nel diagramma del principio di funzionamento dell'SRM trifase a 12/8 poli in Figura 8, quando la corrente dell'avvolgimento della fase A controlla la chiusura dell'interruttore principale S1, S2, la fase A viene eccitata e magnetizzata.
Figura 8 Principio di funzionamento del motore a riluttanza commutato
La forza del campo magnetico generato all'interno del motore forma un campo magnetico radiale con OA come asse. Le linee di forza magnetica di questo campo sono piegate quando attraversano il traferro tra i poli salienti dello statore e i poli salienti del rotore.
In questo momento, la riluttanza magnetica del circuito magnetico è maggiore rispetto a quando il polo saliente dello statore e il polo saliente del rotore coincidono. Pertanto, il polo saliente del rotore viene sollecitato dall'attrazione magnetica, che allinea l'asse del polo del rotore Oa con l'asse del polo dello statore OA.
Questo genera una coppia elettromagnetica di riluttanza magnetica, che fa sì che il rotore inizi a ruotare in senso antiorario. Quando la corrente di fase A viene disattivata e viene stabilita la fonte di alimentazione di fase B, il campo magnetico all'interno del motore ruota di 30 gradi.
Il rotore ruota quindi di altri 15 gradi in senso antiorario sotto l'azione dell'attrazione elettromagnetica. Se l'alimentazione viene fornita in sequenza agli avvolgimenti di fase A-B-C-A, il rotore ruota continuamente in senso antiorario.
Quando gli avvolgimenti dello statore in ciascuna fase sono eccitati a turno, il campo magnetico dello statore ruota di 3×30 gradi e il rotore ruota con un passo dei poli del rotore di 3×15 gradi (cioè 360 gradi / numero di poli salienti del rotore).
Se l'alimentazione viene fornita in sequenza agli avvolgimenti di fase A-C-B-A, il rotore ruota in senso orario. Il senso di rotazione del motore a riluttanza commutata non è legato alla direzione della corrente, ma è determinato dalla sequenza di accensione degli avvolgimenti di fase dello statore.
Nel funzionamento effettivo dei motori multifase, è anche comune che due o più avvolgimenti di fase siano eccitati simultaneamente.
(2) Principio di funzionamento di un generatore a riluttanza commutato
Lo stato di funzionamento di un generatore a riluttanza commutato comporta tre condizioni: lo stato di eccitazione, lo stato di continuazione e lo stato di produzione di energia, come dimostra la forma d'onda dell'induttanza di fase L nella figura 10.
Figura 9 Schema dello stato di funzionamento di un motore a riluttanza commutato
Figura 10 Variazione dell'induttanza di fase con la posizione del rotore
Nella Figura 9, l'angolo θ è definito come l'angolo tra l'asse del polo del dente del rotore e l'asse della fessura del dente dello statore. Quando l'asse del polo del dente del rotore si allinea con l'asse della fessura del dente dello statore corrispondente, l'induttanza di fase è al minimo (definita come θ=0°). L'induttanza di fase dell'avvolgimento rimane costante a Lmin fino a quando il bordo di entrata del polo del rotore non incontra il bordo di uscita del polo dello statore (θ=θ1).
Mentre il rotore continua a ruotare e il polo del rotore inizia a sovrapporsi al polo dello statore, fino a quando il bordo d'uscita del polo del rotore e il bordo d'uscita del polo dello statore si allineano completamente (in questo momento, θ=θ2), l'induttanza di fase dell'avvolgimento aumenta linearmente all'interno di questa regione, raggiungendo un massimo di Lmax.
Quando il rotore continua a ruotare in modo che il bordo d'attacco del polo del rotore si allinei con il bordo d'attacco del polo dello statore (in questo momento, θ=θ4), l'induttanza di fase rimane a Lmax.
Secondo la teoria di base del campo elettromagnetico, l'esistenza di un campo magnetico è accompagnata dalla coppia elettromagnetica del rotore del motore, che può essere rappresentata dall'equazione (3).
Se gli avvolgimenti del motore a riluttanza commutata vengono accesi e spenti tra θ3 e θ4, il motore funziona come un generatore. In questo momento, nella regione di induttanza decrescente si forma una corrente, per cui dL/dθ<0.
Se in questo momento la corrente attraversa gli avvolgimenti di fase, si genera una coppia di frenatura (T(θ, i)<0). Se una forza meccanica esterna mantiene la rotazione del motore, il motore assorbe l'energia meccanica e la converte in uscita elettrica, indicando che il motore a riluttanza commutata funziona in modalità generatore.
3. Vantaggi, svantaggi e campo di applicazione dei motori a riluttanza commutata
I vantaggi dei motori a riluttanza commutata sono la struttura semplice e affidabile, le buone prestazioni di avviamento, l'elevata efficienza e il basso costo. Offrono un'ampia gamma di funzionalità di controllo della velocità variando la conduzione, gli angoli di spegnimento e la tensione. Tuttavia, gli svantaggi includono una notevole ondulazione della coppia e un'elevata rumorosità.
Attualmente sono utilizzati in alcuni piccoli veicoli a trazione elettrica, come gli scooter elettrici a quattro ruote e le auto di pattuglia.
IV. Conclusione
Date le diverse caratteristiche prestazionali richieste dai motori di propulsione dei veicoli a energia nuova, il tipo di motore di trazione scelto varia tra i diversi modelli del mercato.
Questo articolo illustra la struttura e i principi di funzionamento dei motori a nuova energia comunemente utilizzati, come i motori asincroni in c.a., i motori sincroni a magneti permanenti e i motori a riluttanza commutata. Queste informazioni contribuiranno a una migliore comprensione di questi motori di azionamento.
Inoltre, la struttura e i principi di ciascun tipo di motore differiscono, dando luogo a un'ampia gamma di applicazioni. Secondo la pianificazione strategica industriale nazionale, la ricerca sui sistemi di trazione elettrica dei veicoli ecologici a nuova energia continuerà ad espandersi. Di conseguenza, anche la varietà e il livello tecnologico dei motori continueranno a progredire.
Non dimenticatevi che condividere è un'opera di carità! : )
Condividi
Facebook
Twitter
LinkedIn
Reddit
VK
Email
Stampa
Autore
Shane
Fondatore di MachineMFG
In qualità di fondatore di MachineMFG, ho dedicato oltre un decennio della mia carriera al settore della lavorazione dei metalli. La mia vasta esperienza mi ha permesso di diventare un esperto nei campi della fabbricazione di lamiere, della lavorazione, dell'ingegneria meccanica e delle macchine utensili per metalli. Penso, leggo e scrivo costantemente su questi argomenti, cercando di essere sempre all'avanguardia nel mio campo. Lasciate che le mie conoscenze e la mia esperienza siano una risorsa per la vostra azienda.
Vi siete mai chiesti come fanno i treni a fluttuare sui binari o come fanno i robot a realizzare movimenti precisi? Questo articolo svela l'affascinante mondo dei motori lineari, spiegandone i principi, i tipi e i vantaggi unici....
I servosistemi sono parte integrante dei prodotti elettromeccanici e forniscono il massimo livello di risposta dinamica e densità di coppia. Pertanto, la tendenza nello sviluppo dei sistemi di azionamento è quella di sostituire i tradizionali...
Vi siete mai chiesti cosa distingue i motori a corrente continua da quelli a corrente alternata? In questo articolo esploriamo le differenze fondamentali tra questi due tipi di motori, compresi i loro principi di funzionamento,...
Nel frenetico mondo dell'automazione industriale, i servomotori sono gli eroi non celebrati della precisione e dell'efficienza. Ma con innumerevoli produttori che si contendono l'attenzione, come si fa a sapere quali...
Vi siete mai chiesti come fanno le macchine a convertire forze invisibili in movimenti potenti? In questo post esploreremo l'affascinante mondo delle trasmissioni pneumatiche e idrauliche. Imparerete come queste...
Vi siete mai chiesti cosa fa girare il mondo senza problemi? Gli eroi non celebrati dietro le quinte sono i cuscinetti. Questi piccoli ma potenti componenti svolgono un ruolo cruciale nel ridurre l'attrito...
Vi siete mai chiesti cosa alimenta le macchine che guidano il nostro mondo? I riduttori sono gli eroi non celebrati di molti settori, da quello automobilistico a quello dell'energia eolica. In questo articolo esplorerete...
La scelta del servomotore giusto per il vostro progetto può essere un compito scoraggiante, con le tante opzioni disponibili. Questo articolo semplifica il processo, suddividendo le considerazioni principali: applicazione...
Come fanno i motori elettrici a convertire l'elettricità in movimento? Immaginate un mondo in cui quasi la metà della nostra energia elettrica è alimentata da questi motori. Questo articolo approfondisce la scienza dei motori elettrici, spiegando...