Guida completa ai cuscinetti lineari: Tutto quello che c'è da sapere
Vi siete mai chiesti quale sia la chiave per un movimento fluido e preciso nelle macchine? Le guide lineari sono gli eroi non celebrati di innumerevoli sistemi automatizzati, che consentono di trasferire, movimentare, posizionare e assemblare senza sforzo. In questo post ci addentreremo nel mondo delle guide lineari, confrontandole con altri componenti per il movimento lineare e rivelandone i vantaggi unici. Preparatevi a scoprire come queste meraviglie dell'ingegneria possono rivoluzionare i vostri progetti!
1. Cuscinetti lineari e altri componenti per la guida del movimento lineare
I componenti di guida per il movimento lineare sono i componenti più comunemente utilizzati nei meccanismi di movimento automatizzati per il trasferimento, la movimentazione, il posizionamento e l'assemblaggio.
In questa sede confronteremo le guide lineari, le guide di scorrimento e le boccole senza olio, concentrandoci sull'utilizzo delle guide lineari.
(1) Confronto delle caratteristiche dei cuscinetti lineari
Un confronto approssimativo delle caratteristiche dei tre componenti di guida del movimento lineare è riassunto nella tabella seguente.
Di seguito viene presentata un'introduzione alla relazione tra le caratteristiche sopra citate e la costruzione.
(2) La correlazione tra le caratteristiche e la costruzione delle guide lineari.
1. Differenze di prestazioni rispetto alla capacità di carico:
Cuscinetti lineari e boccole autolubrificanti.
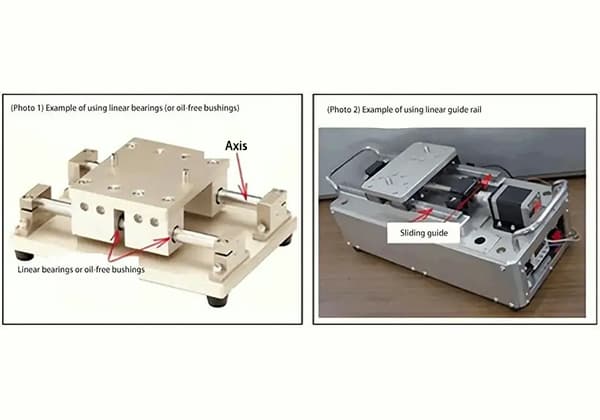
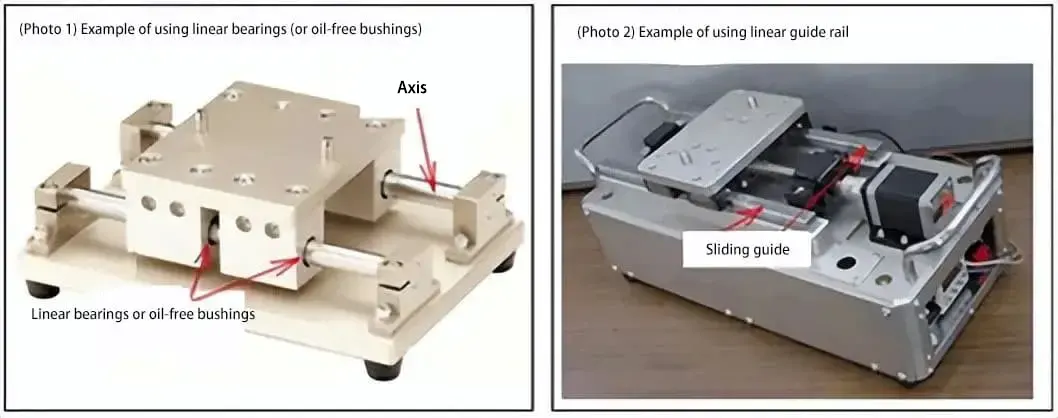
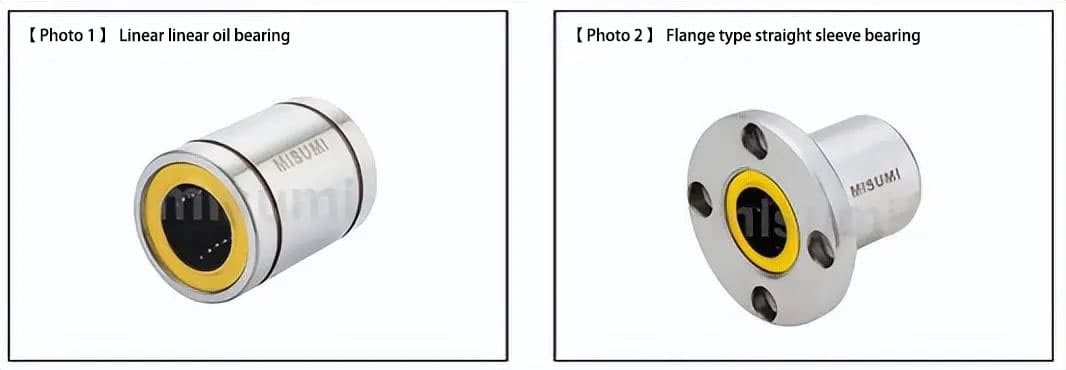
a) I componenti mobili con cuscinetti lineari o boccole autolubrificanti sono generalmente assemblati su un albero (guida) sostenuto da strutture di supporto ad entrambe le estremità per ottenere la loro funzione di movimento. Quando si trasportano carichi elevati, l'albero si deforma facilmente (vedere [foto 1]).
(Inoltre, in caso di guida verticale lineare, è possibile utilizzare una struttura semplice che ignora il problema del carico, poiché l'albero non deve sostenere il carico del componente in movimento).
Guide lineari
b) I componenti mobili si muovono sulle guide fisse montate sul basamento, che ha ottime caratteristiche di portanza (vedi [foto 2]).
Cuscinetti lineari e boccole autolubrificanti => Movimento lineare su un albero (guida) fissato a entrambe le estremità => movimento lineare con carichi da leggeri a medi.
Guide lineari => Movimento lineare su guide fissate alla base => movimento lineare con carichi da leggeri a pesanti.
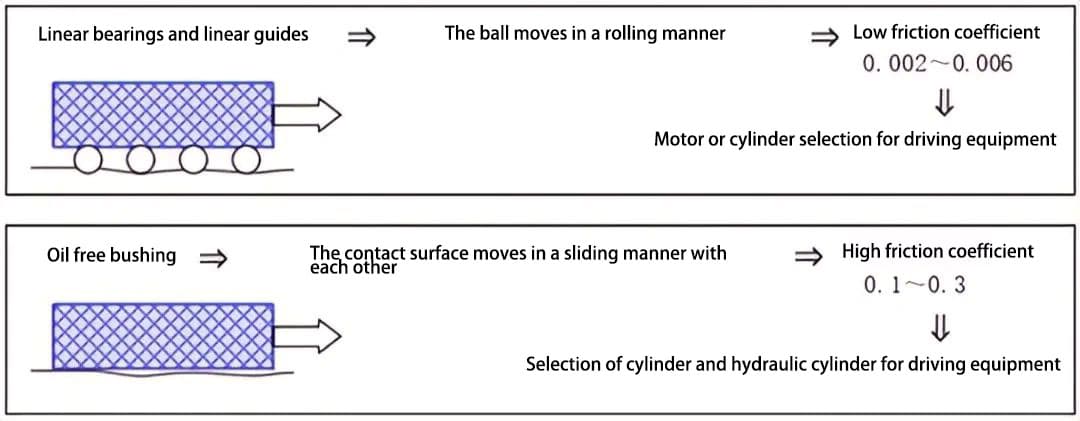
2. Differenze di prestazioni rispetto al coefficiente di attrito:
In questo caso, le differenze nel metodo di scorrimento della guida (rotolamento o scorrimento superficiale) determinano le differenze di prestazioni. La differenza del coefficiente di attrito è direttamente correlata alla scelta dell'attuatore di guida.
a) Piccola resistenza d'attrito = piccola forza d'attrito = può essere azionato da un motore a coppia ridotta = il moto rotatorio può essere convertito in moto lineare.
b) Grande resistenza all'attrito = grande forza di attrito = richiede una grande coppia o spinta = può essere azionato direttamente da un cilindro lineare.
Precauzioni d'uso
L'entità del coefficiente di attrito influisce sulla capacità dell'apparecchiatura di azionamento e sulla quantità di calore generato durante il funzionamento. Le boccole autolubrificanti non sono adatte al funzionamento continuo ad alta velocità con elevata generazione di calore.
Quando si utilizza un cilindro, la velocità iniziale/di arresto non può essere controllata come nel caso di un motore. Il funzionamento ad alta velocità e la soppressione delle vibrazioni possono essere ottenuti installando meccanismi di frenatura flessibili come ammortizzatori e smorzatori.
3. Differenze di prestazioni rispetto alla precisione della guida:
In sostanza, le prestazioni sono determinate dalla distanza tra il cuscinetto e la guida.
a) Nel caso delle guide lineari, si utilizza un albero cilindrico come guida e la distanza tra il cuscinetto e la guida è impostata su "interferenza: g6" o "transizione: h5" e il cuscinetto scorre in uno stato di "distanza" minima.
b) Per le guide lineari, si utilizzano guide dedicate e si abbinano cuscinetti di alta precisione e guide di tipo a distanza ridotta (0-3 μm) o pressurizzate (-3-0 μm).
c) Rispetto alle guide lineari, le boccole autolubrificanti presentano uno spazio maggiore tra la guida (albero), con conseguente minore precisione di guida.
Precauzioni d'uso
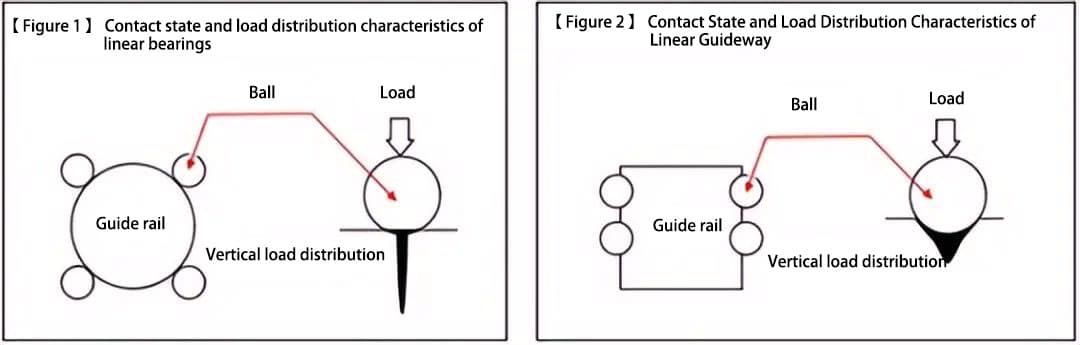
Gli stati di contatto tra la sfera e la guida sono diversi per i cuscinetti lineari e le guide lineari. Le guide lineari hanno uno stato di contatto puntiforme, in cui la parte di contatto sopporta localmente un carico elevato.
La parte di contatto tra la rotaia di guida e il cuscinetto a sfere nelle guide lineari adotta una forma a scanalatura, che consente alla sfera di trovarsi in uno stato di contatto superficiale con la superficie della rotaia di guida e quindi di disperdere il carico di contatto.
Esistono inoltre differenze nelle caratteristiche di capacità di carico tra i due modelli rispetto allo stato di contatto nella porzione di scorrimento. ([Figura 1] e [Figura 2])
Cuscinetti lineari => stato di contatto puntiforme => distribuzione del carico verticale non uniforme => non adatti a condizioni di carico elevato.
Guide lineari => stato di contatto superficiale => distribuzione del carico verticale disperso => in grado di sopportare carichi relativamente elevati.
4. Resistenza ambientale e manutenibilità:
Questa differenza di prestazioni è determinata dalle differenze tra i materiali costituenti.
a) I cuscinetti lineari e le guide lineari possono raggiungere un'affidabilità a lungo termine grazie all'effetto dell'olio lubrificante (grasso), per cui l'ambiente di lavoro non può superare l'indice di resistenza ambientale dell'olio lubrificante.
b) Le boccole autolubrificanti sono generalmente utilizzate in ambienti in cui non è presente una olio lubrificantee hanno una buona resistenza ambientale e manutenibilità.
2. Distinzione tra tipi lineari e flangiati
Di seguito spieghiamo le differenze tra le forme esterne delle guide lineari (tipo lineare e tipo flangiato) e le precauzioni da adottare durante il montaggio.
(1) Cuscinetti lineari di tipo lineare e di tipo flangiato
La [Foto 1] mostra il tipo lineare, mentre la [Foto 2] mostra il tipo flangiato.
Il tipo di cuscinetto lineare flangiato [Foto 2] presenta i seguenti vantaggi:
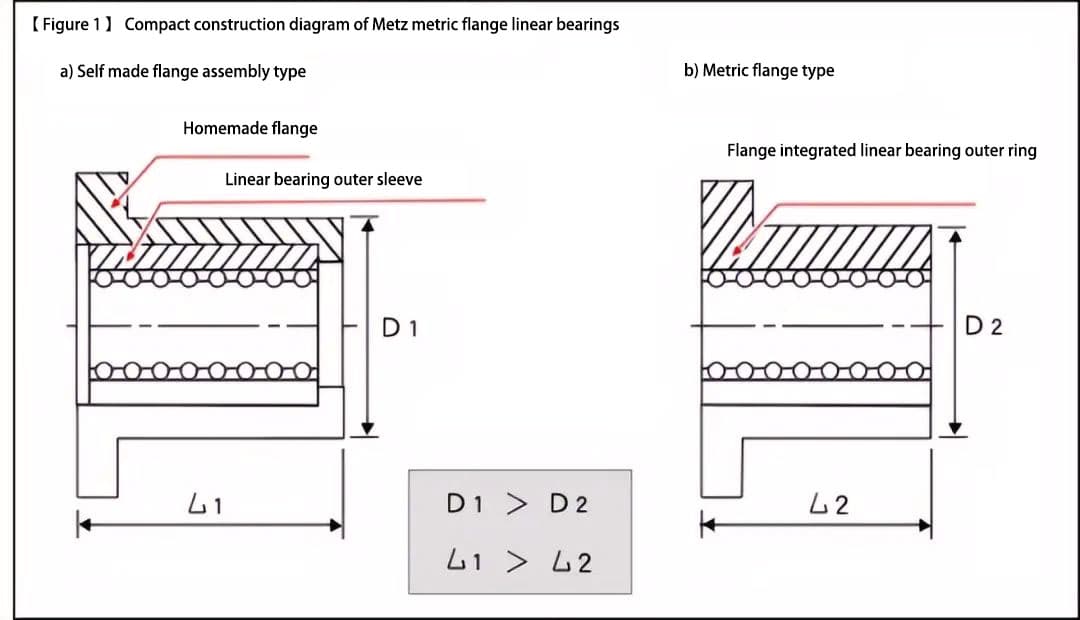
Ha una struttura più compatta grazie all'adozione di una costruzione integrata di un cuscinetto lineare e di un manicotto dell'albero flangiato ([Figura 1]).
Rispetto a un cuscinetto lineare abbinato a una flangia prodotta separatamente, presenta vantaggi quali il costo ridotto, i tempi di consegna brevi e la qualità stabile.
[Figura 1] è un diagramma schematico che illustra la struttura compatta del cuscinetto lineare flangiato. La struttura di montaggio del cuscinetto lineare con flangia e la forma del manicotto dell'albero sono troppo lunghe, mentre il cuscinetto lineare flangiato adotta una struttura integrata, più compatta. Questa struttura compatta consente di mantenere le prestazioni di carico.
(2) Distinzione tra tipi lineari e tipi a flangia
Scegliere lineare o a flangia tipi di cuscinetti secondo i seguenti criteri: Selezionare i tipi di cuscinetti lineari a flangia se sono portanti.
Scegliere in base allo spazio circostante e alle superfici di costruzione intorno all'installazione delle guide lineari. Fare riferimento al punto (3) per i metodi di installazione e le precauzioni relative alle guide lineari.
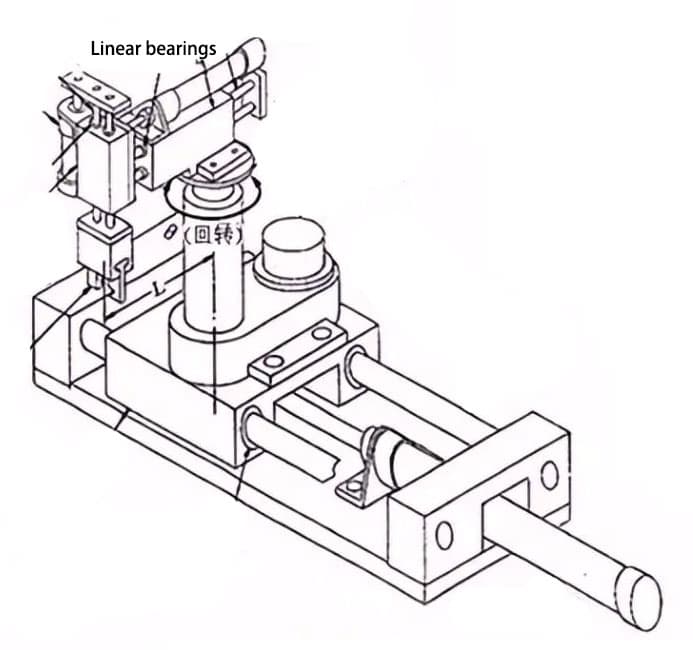
I cuscinetti lineari si dividono in tipi a movimento automatico e tipi ad asse fisso per la rotazione dell'albero. La Figura 2 illustra la costruzione di una piattaforma azionata X-Y-Z-θ con l'albero come asse di guida. I cuscinetti sono classificati di conseguenza.
a) Asse X: I cuscinetti lineari sono del tipo a flangia e a movimento automatico.
b) Asse Y: I cuscinetti lineari sono fissi (in direzione dell'asse Θ) e consentono il movimento in direzione dell'asse A.
c) Asse Z: I cuscinetti lineari sono fissati nella direzione dell'asse Z e consentono il movimento nella direzione dell'asse Y.
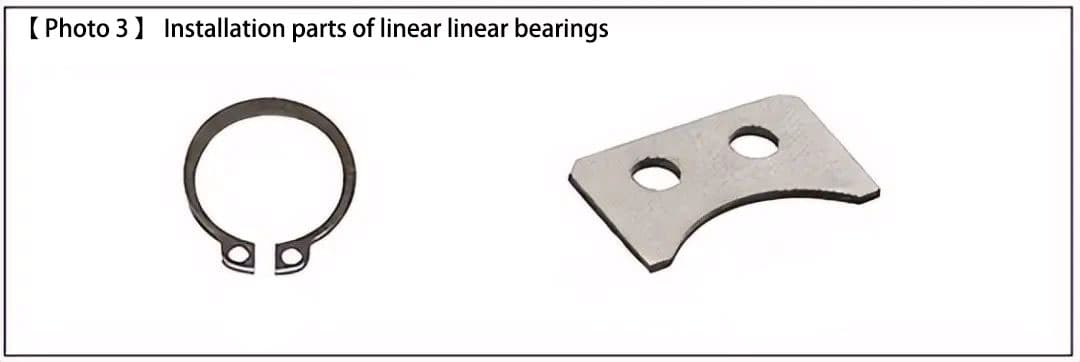
Per i tipi lineari, selezionare i metodi di fissaggio con anello elastico o piastra di arresto in base alla resistenza desiderata del fissaggio.
a) La parte mobile dell'asse X della sezione è soggetta alla forza inerziale del peso della parte mobile sostenuta dal cuscinetto lineare. Il cuscinetto lineare deve essere fissato saldamente.
b) Il cuscinetto lineare è fissato alla sede del cuscinetto e, a causa dell'uso di un cilindro per azionare la struttura dell'albero, il fissaggio assiale del cuscinetto lineare resiste solo alla forza di reazione dell'attrito, pertanto è stato adottato un design compatto per il tipo lineare. Inoltre, le guide lineari dell'asse Y sono posizionate in direzione opposta rispetto ai due assi rispetto all'asse di rotazione della piattaforma azionata θ, consentendo un'elevata rigidità in relazione alla coppia di rotazione.
c) Se si considera la direzione dell'albero mobile, è uguale a b) e non sopporta grandi forze.
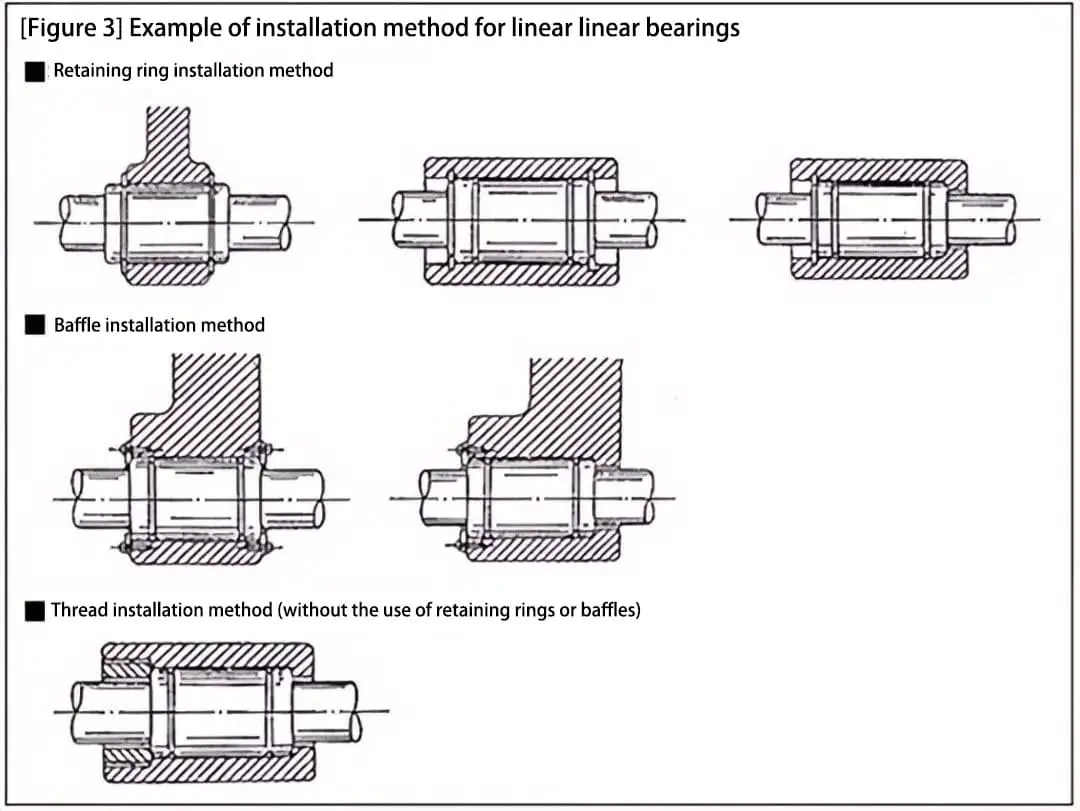
(3) Metodi e precauzioni di installazione dei cuscinetti lineari.
(1) Metodi di installazione delle guide lineari
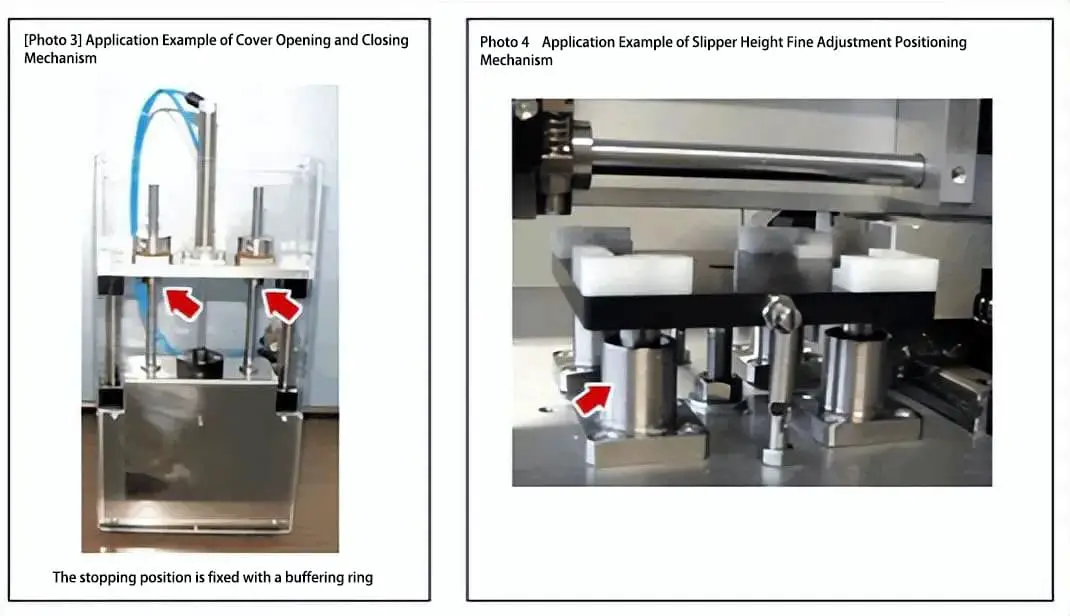
I cuscinetti lineari vengono generalmente installati utilizzando anelli elastici o piastre di arresto (vedere [Foto 3] e [Figura 3]).
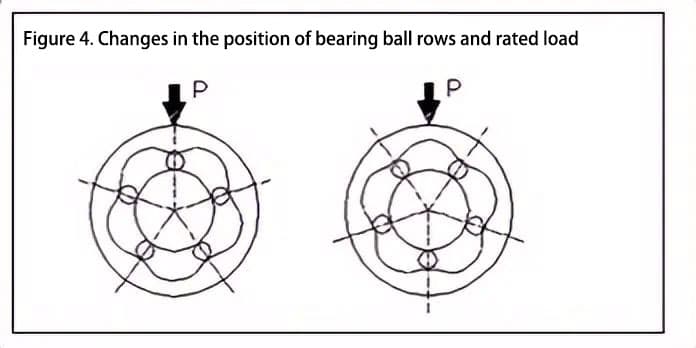
(2) Precauzioni per l'angolo di montaggio delle guide lineari
A causa delle differenze nel diametro e nel tipo di albero, nonché del numero di file di sfere nel cuscinetto, le guide lineari hanno generalmente da 4 a 6 file di sfere disposte ad angoli uguali. Quando si utilizzano i cuscinetti lineari in orizzontale, evitare di installarli con le file di sfere in posizione direttamente superiore (come mostrato nella parte sinistra della [Figura 4]), poiché ciò può causare carichi concentrati.
[La Figura 4 mostra un cuscinetto a 5 corone di sfere e il rapporto tra i valori di carico nominale è indicato di seguito (lato destro ÷ lato sinistro). Pertanto, l'installazione deve essere effettuata rispettando il più possibile l'angolo di installazione mostrato nel diagramma precedente.
3. Differenziazione di cuscinetti monofoderati, bifoderati, estesi e trattati superficialmente.
(1) Lunghezza del cuscinetto e prestazioni di guida
I cuscinetti lineari possono essere suddivisi in quattro tipi in base alla lunghezza del cuscinetto:
[1] monofodera
[2] doppiamente foderato
[3] esteso
[4] progettata dal cliente (utilizzando due tipi di monofili).
La differenza di lunghezza del cuscinetto influisce direttamente sulle prestazioni di guida:
a) Capacità di carico
b) Precisione di guida
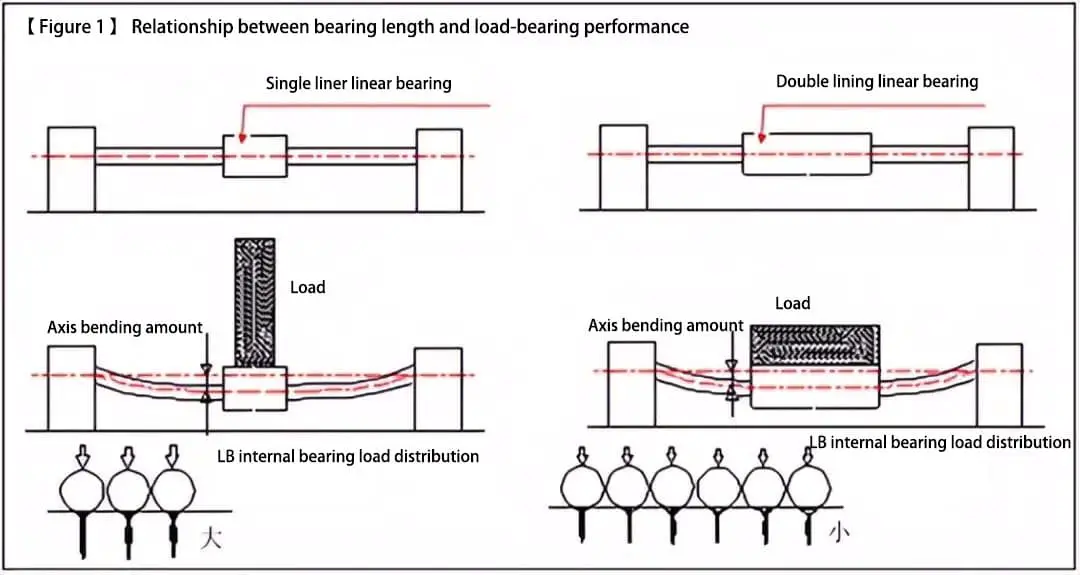
a) Relazione tra lunghezza del cuscinetto e capacità portante
Più lungo è il cuscinetto, maggiore è il numero di punti di appoggio e minore è il carico richiesto per ogni punto di contatto del cuscinetto. Questa conclusione può essere tratta dalla situazione reale in cui il carico nominale dei tre tipi [1], [2] e [3] di cuscinetti lineari aumenta in sequenza con la loro lunghezza.
Pertanto, la scelta di un cuscinetto lineare di lunghezza maggiore può migliorare la capacità di carico del prodotto (= aumento della durata di vita e dell'affidabilità) ([Figura 1]).
b) Rapporto tra lunghezza del cuscinetto e precisione di guida
Maggiore è la lunghezza del cuscinetto, maggiore è la precisione di guida.
1)
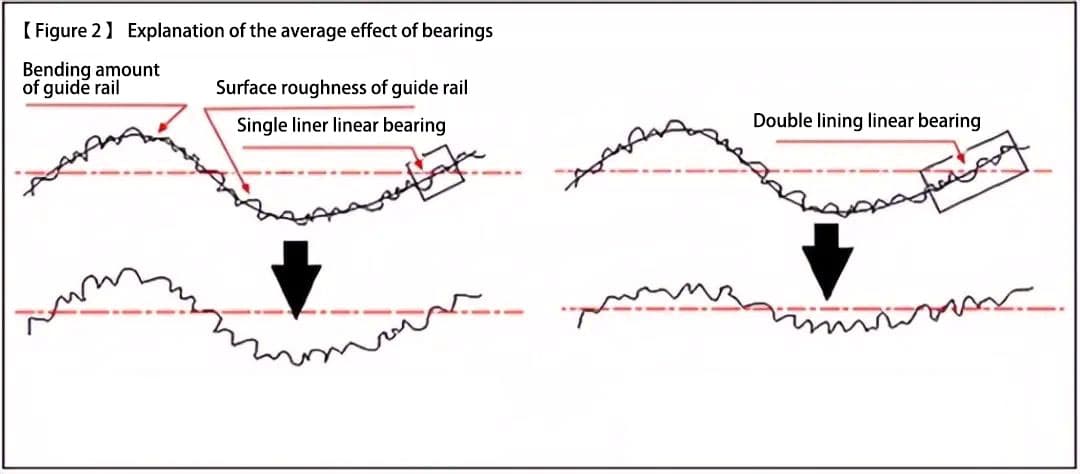
Mediando l'errore di guida della guida (albero), è possibile migliorare l'accuratezza del prodotto (per i dettagli, consultare la nota corrispondente) ([Figura 2]).
2)
La precisione del prodotto può essere migliorata riducendo l'errore di gioco tra la guida (albero) ([Figura 3]).
L'effetto di mediazione dei cuscinetti: Aumentando la lunghezza del cuscinetto della guida lineare, il numero di supporti aumenta e i fattori di errore sulla superficie della guida (rugosità superficiale e deformazione di flessione) possono essere mediati, con l'effetto del fattore di errore soppresso a meno della metà.
Pertanto, aumentando la lunghezza del cuscinetto, è possibile migliorare la capacità di carico e la precisione di guida.
Per questo motivo, il tipo [4] (che utilizza un design dedicato con due tipi monofilo) di cuscinetto lineare è spesso utilizzato in ambienti di lavoro ad alta precisione ([Figura 4]).
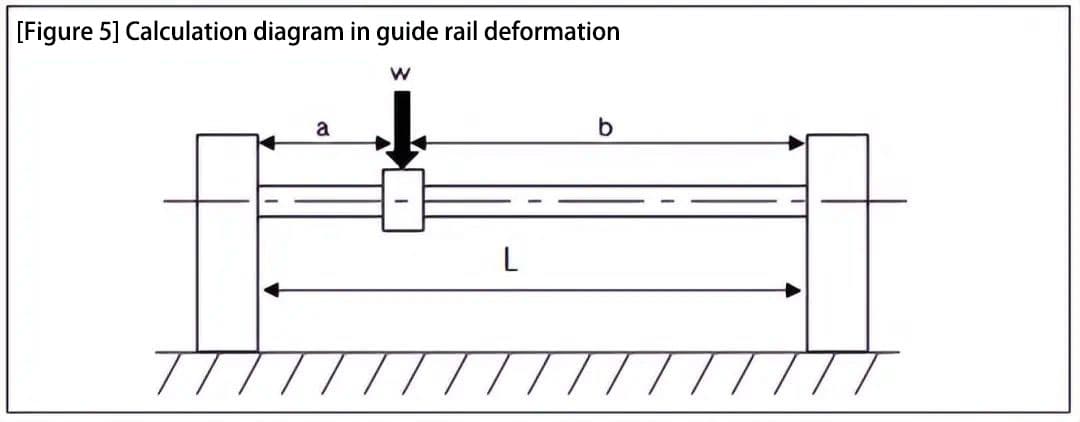
(2) Calcolo della deformazione della guida (albero) ([Figura 5])
In un meccanismo lineare composto da un cuscinetto lineare e da un albero, la deformazione dell'albero può essere calcolata con la seguente equazione:
δ = (W * a3 * b3) / (3 * E * I * L3)
dove:
a: Distanza dall'estremità del supporto alla posizione del carico
b: Distanza tra il punto di appoggio sul lato opposto di a e la posizione del carico.
L: Distanza tra i supporti dell'albero
E: modulo di Young
I: Secondo momento dell'area della sezione trasversale
I = πd4/64 ≈ 0.05d4
d: Diametro dell'albero
W: Carico supportato dal cuscinetto lineare (unità: N)
Quando a = b = L/2, δ = W * L3 / (9,6 * E * d4).
Pertanto, se si desidera ridurre la deformazione dell'albero, è necessario adottare un approccio progettuale che aumenti il diametro dell'albero (effetto 4 volte maggiore) o riduca la distanza tra i supporti dell'albero (effetto 3 volte maggiore).
(3) Caratteristiche ed esempi di applicazione dei materiali dei componenti e dei trattamenti superficiali
I materiali costitutivi, trattamenti superficialie gli esempi di applicazione dei cuscinetti lineari sono presentati nella tabella seguente:
Materiale dell'anello esterno
Trattamento della superficie
Materiale del supporto
Materiale della sfera
Esempi di applicazione:
SUJ2
–
Equivalente a resina/SUS440C
SUJ2
Guida scorrevole con requisiti generali di resistenza all'usura.
Movimento di precisione per componenti ottici senza riflessi in ambiente privo di polvere.
SUJ2
Ni-P chimico
Come sopra.
Come sopra.
Parti scorrevoli resistenti agli agenti chimici in ambienti privi di polvere che richiedono resistenza all'usura.
Equivalente a SUS440
–
Come sopra.
Come sopra.
Carico leggero in ambienti privi di polvere e apparecchiature utilizzate in campo alimentare e medico.
Caratteristiche comparative dei trattamenti di superficie.
Materiale dell'anello esterno:
Trattamento della superficie
Caratteristiche:
SUJ2
–
Il SUJ2 è realizzato in ferro ed è soggetto a ruggine.
Come sopra.
Cromo nero a bassa temperatura
Basso coefficiente di attrito e buona resistenza all'usuraCapace di formare un rivestimento uniforme e sottile di colore nero che non riflette la luce e presenta un buon assorbimento del calore.
Come sopra.
Placcatura chimica di Ni-P
Eccellente resistenza agli agenti chimici e alla corrosione, spesso utilizzato nelle camere biancheRivestimento duro con finitura lucida e non magnetica.
4. Esempio di applicazione dei cuscinetti lineari su semplici apparecchiature automatiche
Le caratteristiche dei cuscinetti lineari sono descritte di seguito:
Cuscinetti di guida semplici e a basso costo con prestazioni medie. (Elevato rapporto costi-benefici)
Basso coefficiente di attrito, che facilita la scelta dell'azionamento. (Cilindro a basso costo o motore a medio prezzo)
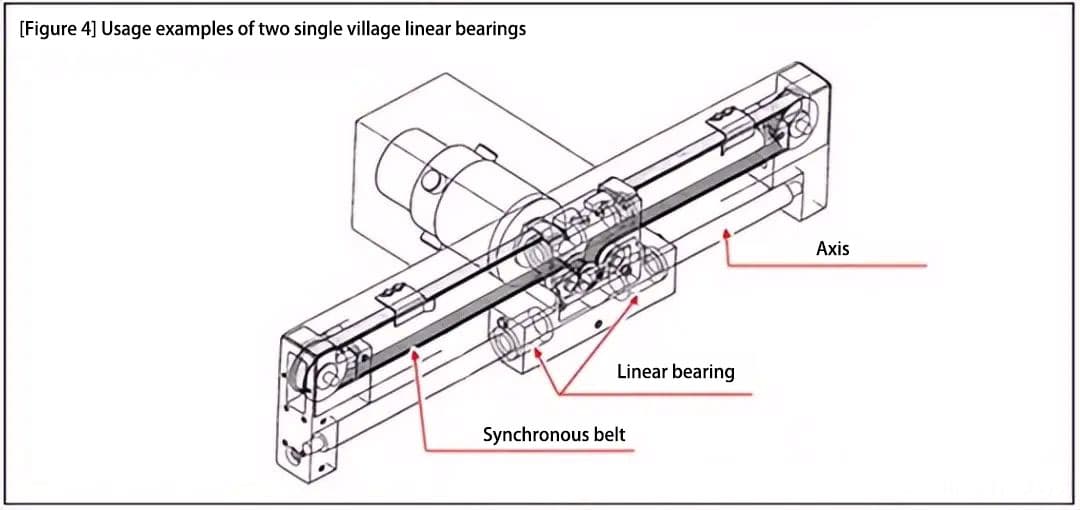
Combinandolo con un cinghia sincronaÈ possibile ottenere una struttura di guida silenziosa e leggera.
Nel caso della guida direzionale verticale, l'uso del metodo di guida del centro di gravità consente una progettazione semplice e compatta.
L'uso e le caratteristiche dei cuscinetti lineari sono spiegati di seguito attraverso un esempio di applicazione in semplici apparecchiature automatizzate.
(1) Motore passo-passo e trasmissione a cinghia sincrona
La trasmissione sincrona a cinghia presenta vantaggi quali la silenziosità, la leggerezza, il basso costo e l'assenza di lubrificazione. Per la situazione del piano di lavoro degli assi X/Y/Z, il concetto di progettazione abituale consiste nel ridurre il carico sul motore dell'asse X inferiore alleggerendo l'asse Y superiore.
Pertanto, l'asse Y viene spesso costruito utilizzando una cinghia sincrona.
a) [Figura 1] mostra un tipico meccanismo di azionamento a 3 assi X/Y/Z.
L'asse X è costituito da guide lineari, mentre gli assi Y e Z sono costruiti con cuscinetti lineari. Il sistema di azionamento utilizza cinghie sincrone e viti a ricircolo di sfere.
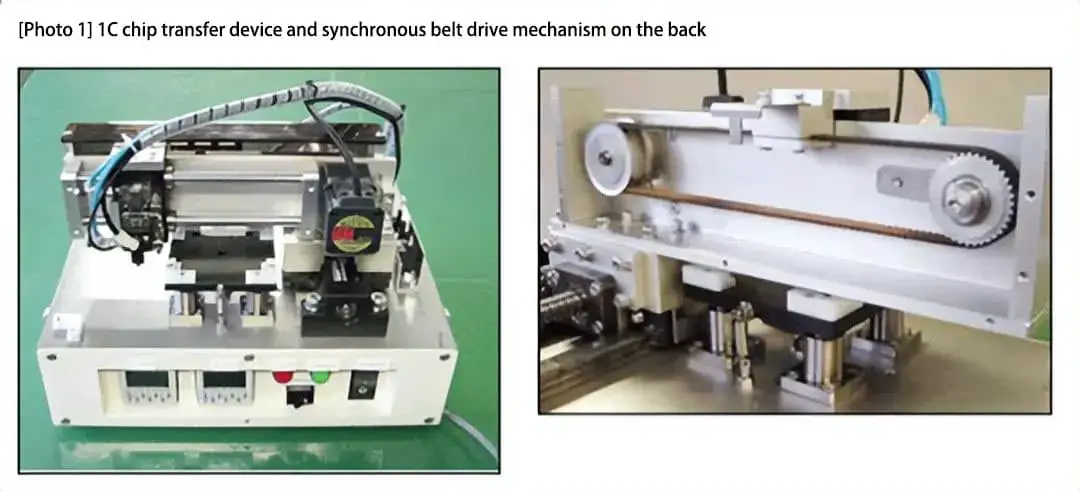
b) [Foto 1] mostra un esempio di applicazione dell'asse Y in un dispositivo di montaggio di chip IC. La direzione dell'asse Y è convertita in movimento alternativo da una cinghia sincrona.
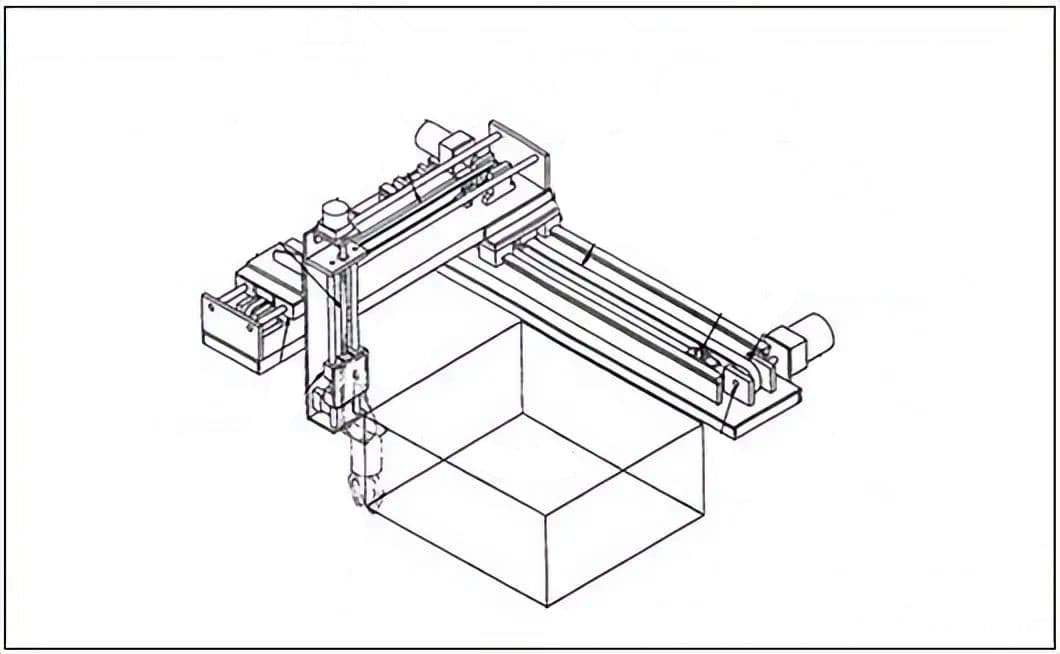
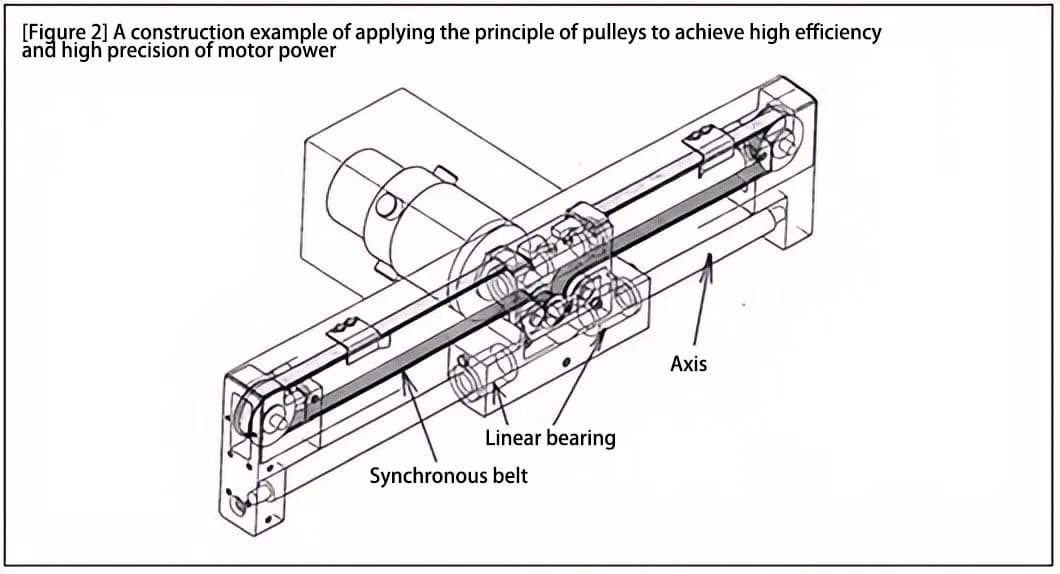
c) [Figura 2] mostra un esempio di applicazione di un robot ad asse singolo con le seguenti caratteristiche:
Per migliorare la capacità di carico e la precisione di guida, vengono utilizzate due guide lineari con un'ampia luce.
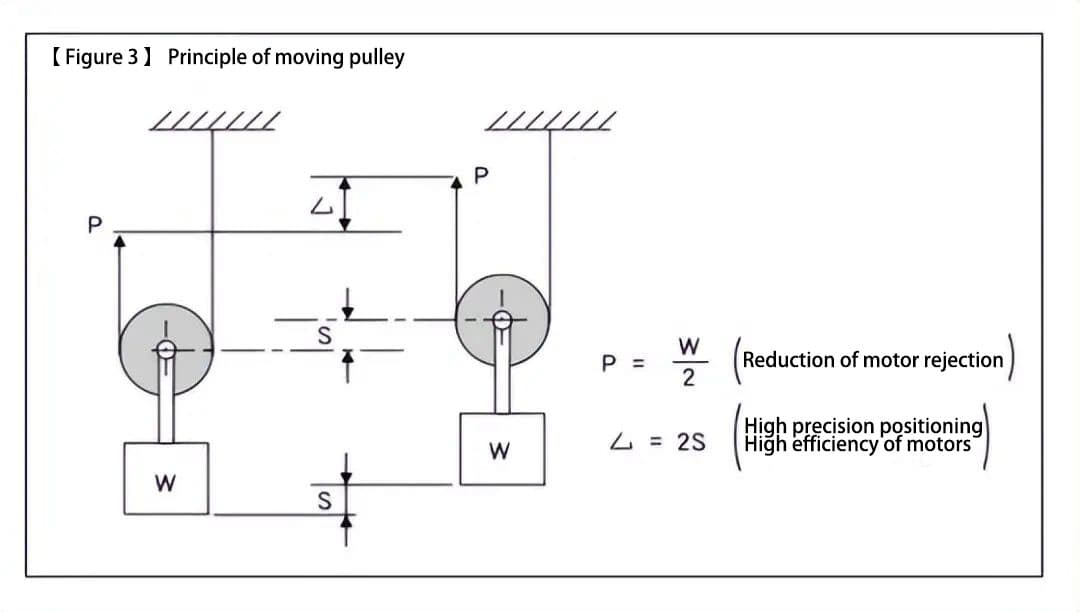
Il design e la struttura della cinghia sincrona e della puleggia utilizzano il principio della puleggia rotante ([Figura 3]) per ottenere un'elevata efficienza della potenza del motore e un posizionamento di alta precisione.
La cinghia sincrona e l'albero sono disposti in parallelo verso l'alto e verso il basso e, anche con una struttura a un asse, è possibile limitare la rotazione relativa tra l'albero e il cuscinetto lineare.
Principio della puleggia mobile:
Per sollevare l'oggetto di sollevamento nella Figura 3 di una distanza S, il blocco della fune deve essere spostato a un'altezza doppia, ma la forza necessaria è solo la metà del peso dell'oggetto di sollevamento, che può essere facilmente sollevato.
2 volte la distanza di spostamento
Precisione di posizionamento in grado di migliorare la risoluzione minima della rotazione del motore Ridurre della metà l'errore di rinculo e di minimo della puleggia Azionamento del motore ad alta velocità di rotazione (2x), con conseguente elevata efficienza del motore
1/2 volte il carico
Può essere azionato da un motore a bassa potenza (senza bisogno di riduttori, ecc.).
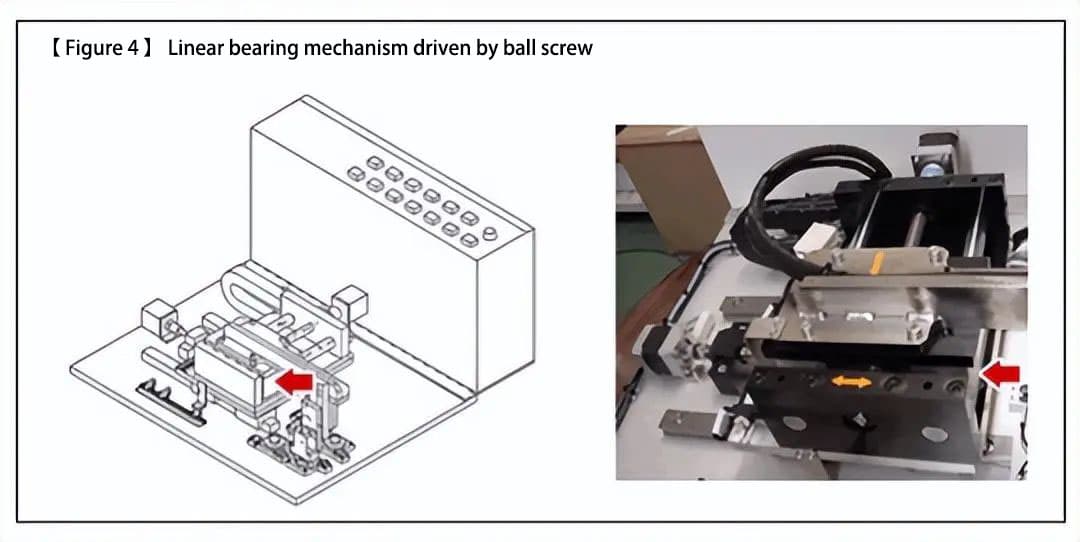
(2) Motore passo-passo e vite a ricircolo di sfere
Il metodo di azionamento della vite a sfere presenta le seguenti caratteristiche: [1] converte direttamente il moto rotatorio del motore in moto lineare e [2] il passo della vite a sfere ha la funzione di riduttore. L'efficienza di trasmissione della forza motrice e l'efficienza del motore sono relativamente elevate.
[Figura 4] è un meccanismo di azionamento in cui l'asse Y utilizza un cuscinetto lineare e una vite a sfera. Questo meccanismo viene solitamente applicato a meccanismi che richiedono un'alimentazione unitaria o che hanno requisiti di precisione di posizionamento.
Informazioni aggiuntive:
a) Caratteristiche di un motore passo-passo
I motori passo-passo hanno la caratteristica di produrre una coppia elevata nell'intervallo di bassa velocità (in genere all'avvio e alla decelerazione), rendendoli adatti ai movimenti su brevi distanze e al controllo del posizionamento multi-punto.
b) Precisione necessaria del motore per raggiungere l'accuratezza del posizionamento del target
Precisione di posizionamento target = ±0,01 (mm). Quando si seleziona una vite a ricircolo di sfere di 10 (mm/giro), la precisione necessaria (divisioni) del motore passo-passo può essere calcolata con la seguente formula.
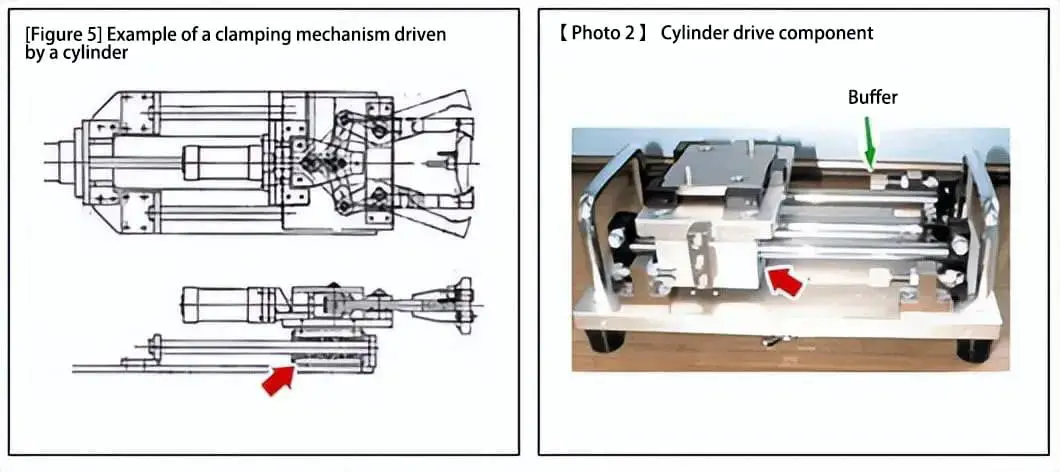
(3) Azionamento del cilindro
La [Figura 5] è un esempio di cuscinetto utilizzato per l'azionamento del cilindro in un meccanismo a pinza, mentre la [Foto 2] è un esempio di meccanismo di azionamento del cilindro che utilizza un accoppiamento magnetico. Entrambi utilizzano cuscinetti lineari (indicati dalle frecce) per la guida.
Non è possibile controllare la velocità di avvio e di arresto con un azionamento a cilindro, quindi è necessario utilizzare un tampone per ridurre l'impatto durante l'arresto (come mostrato in [Foto 2]).
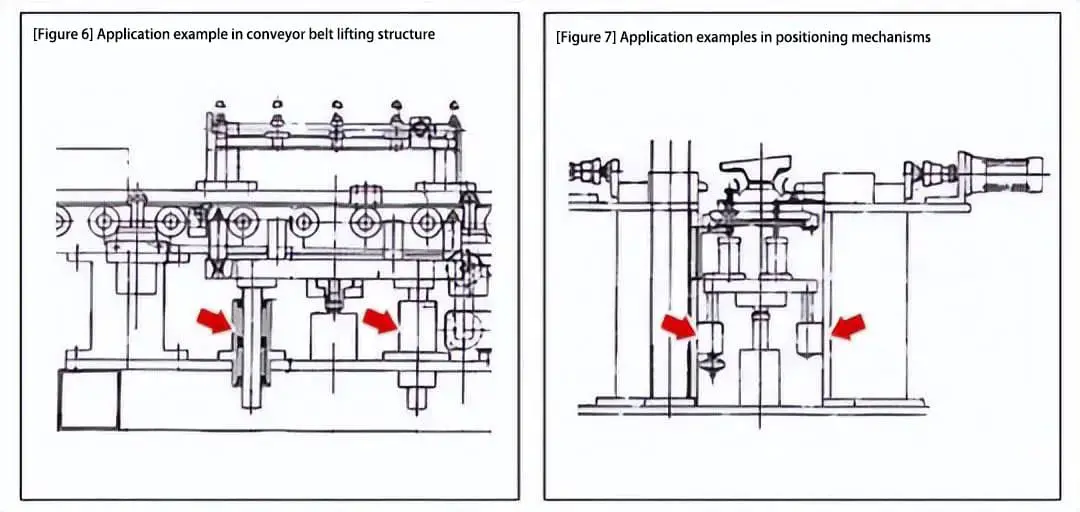
(4) Esempi di guida verticale
La guida verticale può essere realizzata utilizzando guide lineari con flange. Non è necessaria una struttura di supporto specifica per assicurare l'installazione delle guide lineari, il che consente una progettazione strutturale semplice e compatta (nel caso delle guide scorrevoli, dove è necessario predisporre un substrato di montaggio verticale per la guida fissa).
Analogamente alla struttura della [Foto 4], anche la guida di sollevamento (illustrata nella [Figura 6]) e il meccanismo di posizionamento (illustrato nella [Figura 7]) per la parte inferiore del nastro trasportatore utilizzano cuscinetti lineari flangiati.
Non dimenticatevi che condividere è un'opera di carità! : )
Condividi
Facebook
Twitter
LinkedIn
Reddit
VK
Email
Stampa
Autore
Shane
Fondatore di MachineMFG
In qualità di fondatore di MachineMFG, ho dedicato oltre un decennio della mia carriera al settore della lavorazione dei metalli. La mia vasta esperienza mi ha permesso di diventare un esperto nei campi della fabbricazione di lamiere, della lavorazione, dell'ingegneria meccanica e delle macchine utensili per metalli. Penso, leggo e scrivo costantemente su questi argomenti, cercando di essere sempre all'avanguardia nel mio campo. Lasciate che le mie conoscenze e la mia esperienza siano una risorsa per la vostra azienda.
Immaginate di sbloccare la precisione delle macchine utensili con una semplice superficie di vetro. Le righe a reticolo lineare fanno proprio questo, trasformando le linee sottili in misure estremamente precise. Questo articolo analizza come queste...
Vi siete mai chiesti come si smussano gli spigoli delle parti metalliche? Questo processo, noto come smussatura, trasforma gli angoli pericolosi e frastagliati in superfici angolate più sicure. In questo articolo...
Vi siete mai chiesti quali siano i migliori marchi di cuscinetti al mondo? In questo post esploreremo i principali produttori di cuscinetti noti per la loro eccezionale qualità, innovazione e...
Vi siete mai chiesti chi alimenta il mondo dietro le quinte? In questo post del blog, faremo un'immersione profonda nei principali produttori di generatori che tengono accese le luci...
Siete aspiranti ingegneri meccanici e volete eccellere nel vostro campo? In questo post esploreremo i 10 software di progettazione meccanica più importanti che possono elevare la vostra...
Vi siete mai chiesti come viene garantita l'integrità dei dadi e delle viti saldati nella vostra auto? Questo articolo svela il meticoloso processo di controlli e ispezioni di qualità che mantengono il vostro veicolo...
Vi siete mai chiesti cosa fa sì che un motore elettrico funzioni regolarmente senza surriscaldarsi? Conoscere le temperature di funzionamento sicure dei motori è fondamentale per la loro longevità e le loro prestazioni. In questo articolo,...
Vi siete mai interrogati sull'affascinante mondo della fusione? Questo processo produttivo, antico ma in continua evoluzione, dà forma alla nostra vita quotidiana in innumerevoli modi. In questo post esploreremo il...
Vi siete mai chiesti come fanno gli ingranaggi della vostra auto o del vostro aereo a funzionare così bene? Questo articolo svela i principali produttori di ingranaggi che stanno dando forma al futuro dell'ingegneria meccanica. Imparerete...