I. Tipo di carico azionato
Questo va detto in ordine inverso, partendo dai tipi di motori.
Il motore può essere classificato in due categorie principali: Motore CC e motore CA. Il motore a corrente alternata può essere ulteriormente suddiviso in due tipi: motore sincrono e motore asincrono.
1. Motore DC
Il vantaggio di un motore a corrente continua è la capacità di regolare facilmente la velocità cambiando la tensione, fornendo una coppia maggiore e rendendolo adatto a carichi che richiedono frequenti regolazioni della velocità, come i mulini nelle acciaierie e gli ascensori nelle miniere.
Tuttavia, con lo sviluppo della tecnologia di conversione di frequenza, i motori a corrente alternata possono ora regolare la velocità modificando la frequenza. Sebbene il costo di un motore a frequenza variabile non sia significativamente superiore a quello di un motore tradizionale, esso rappresenta comunque una parte significativa del costo complessivo dell'apparecchiatura, il che conferisce ai motori a corrente continua un vantaggio in termini di convenienza economica.
Lo svantaggio principale di un motore a corrente continua risiede nella sua struttura complessa, che aumenta la probabilità di guasti. I motori a corrente continua hanno avvolgimenti complessi, come l'avvolgimento di eccitazione, l'avvolgimento del polo di commutazione, l'avvolgimento di compensazione e l'avvolgimento di armatura, oltre a componenti aggiuntivi come collettori rotanti, spazzole e commutatori. Ciò comporta elevati requisiti di produzione e costi di manutenzione relativamente alti.
Di conseguenza, i motori a corrente continua sono in declino nelle applicazioni industriali, ma hanno ancora un posto nella fase di transizione. Se l'utente dispone di fondi sufficienti, si consiglia di scegliere lo schema di un motore a corrente alternata con un convertitore di frequenzaperché apporta molti benefici.
2. Motore asincrono
I vantaggi dei motori asincroni sono la semplicità della struttura, la stabilità delle prestazioni, la facilità di manutenzione e il basso costo.
Inoltre, il processo di produzione è semplice. Secondo un vecchio tecnico di un'officina, le ore di lavoro necessarie per assemblare un motore a corrente continua possono completare l'assemblaggio di due motori sincroni o di quattro motori asincroni di potenza simile. Per questo motivo i motori asincroni sono ampiamente utilizzati nell'industria.
I motori asincroni si dividono in motori a gabbia di scoiattolo e motori avvolti, con la differenza principale nel rotore. Il rotore di un motore a gabbia di scoiattolo è costituito da strisce di metallo, come rame o alluminio.
L'alluminio è relativamente economico e ampiamente utilizzato in applicazioni a bassa domanda perché la Cina è un grande paese estrattivo di alluminio.
Il rame, invece, ha migliori proprietà meccaniche ed elettriche ed è più comunemente utilizzato nei rotori. Dopo aver affrontato il problema della rottura delle righe nella tecnologia, l'affidabilità dei motori a gabbia di scoiattolo è migliorata notevolmente e ora è migliore di quella dei motori a rotore avvolto.
Tuttavia, i motori a gabbia di scoiattolo hanno una bassa coppia in uscita e una corrente di avviamento elevata, che li rende inadatti a carichi che richiedono una coppia di avviamento elevata. Aumentando la lunghezza del nucleo del motore si può aumentare la coppia, ma l'incremento è limitato.
D'altra parte, i motori avvolti eccitano l'avvolgimento del rotore attraverso anelli di scorrimento per formare un campo magnetico del rotore che si muove rispetto al campo magnetico rotante dello statore, con conseguente maggiore coppia in uscita.
La resistenza ad acqua è collegata in serie per ridurre la corrente di avviamento durante il processo di avviamento e il valore della resistenza è controllato da un dispositivo di controllo elettrico. I motori avvolti sono adatti per applicazioni quali laminatoi e montacarichi.
Rispetto ai motori a gabbia di scoiattolo, i motori asincroni avvolti hanno componenti aggiuntivi come anelli di scorrimento, resistenza all'acqua e resistenza elettrica, che comportano un costo complessivo più elevato. I motori asincroni hanno inoltre un intervallo di regolazione della velocità relativamente ristretto e una coppia ridotta rispetto ai motori a corrente continua.
Tuttavia, hanno un impatto significativo sulla rete elettrica perché richiedono energia reattiva dalla rete per eccitare l'avvolgimento dello statore, che è un elemento induttivo. Quando gli apparecchi induttivi ad alta potenza sono collegati alla rete, si può notare un calo della tensione di rete e una diminuzione della luminosità della luce.
Per mitigare questo impatto, gli uffici per la fornitura di energia elettrica possono limitare l'uso dei motori asincroni. Alcuni grandi utilizzatori di energia, come le acciaierie e gli impianti di alluminio, dispongono di proprie centrali elettriche per formare reti elettriche indipendenti e ridurre le restrizioni sull'uso dei motori asincroni.
I motori asincroni necessitano di dispositivi di compensazione della potenza reattiva per soddisfare i requisiti dei carichi ad alta potenza, mentre i motori sincroni possono fornire potenza reattiva alla rete attraverso dispositivi di eccitazione. Maggiore è la potenza, più pronunciati sono i vantaggi dei motori sincroni, con conseguente spostamento verso l'uso di motori sincroni.
3. Motore sincrono
I vantaggi dei motori sincroni includono la capacità di compensare la potenza reattiva negli stati di sovraeccitazione, nonché i seguenti:
- Controllo accurato della velocità, in quanto la velocità di un motore sincrono rispetta rigorosamente n = 60f/p.
- Elevata stabilità di funzionamento. In caso di improvvisa caduta della tensione di rete, il sistema di eccitazione del motore sincrono forzerà generalmente l'eccitazione per mantenere la stabilità, mentre la coppia di un motore asincrono (proporzionale alla tensione al quadrato) si ridurrebbe notevolmente.
- Maggiore capacità di sovraccarico rispetto ai corrispondenti motori asincroni.
- Alta efficienza, soprattutto per i motori sincroni a bassa velocità.
Tuttavia, i motori sincroni non possono essere avviati direttamente e richiedono metodi di avviamento asincroni o a frequenza variabile. L'avviamento asincrono prevede l'installazione di un avvolgimento di avviamento simile a un avvolgimento a gabbia di un motore asincrono sul rotore di un motore sincrono e il collegamento di una resistenza aggiuntiva (circa 10 volte il valore della resistenza dell'avvolgimento di eccitazione) nel circuito di eccitazione per formare un circuito chiuso. Quando la velocità raggiunge la velocità subsincrona (95%), la resistenza aggiuntiva viene interrotta. L'avviamento a frequenza variabile non è dettagliato.
I motori sincroni richiedono una corrente di eccitazione per funzionare e, senza di essa, il motore diventa asincrono. L'eccitazione è un sistema a corrente continua aggiunto al rotore, la cui velocità di rotazione e polarità sono sincronizzate con lo statore. Se c'è un problema con l'eccitazione, il motore sarà fuori passo e non potrà essere regolato, provocando un intervento di protezione per "guasto di eccitazione".
L'aggiunta di dispositivi di eccitazione è il secondo svantaggio dei motori sincroni. In passato, l'eccitazione veniva fornita direttamente dalle macchine a corrente continua, ma oggi è per lo più fornita da raddrizzatori controllati al silicio. Più complessa è la struttura e l'apparecchiatura, più numerosi sono i punti di guasto e più alto è il tasso di guasto.
I motori sincroni sono utilizzati principalmente in applicazioni quali paranchi, mulini, ventilatori, compressori, laminatoi e pompe idrauliche. Il principio di selezione dei motori è quello di privilegiare i motori con strutture semplici, prezzi bassi, funzionamento affidabile e manutenzione conveniente, a condizione che le prestazioni del motore soddisfino i requisiti dei macchinari di produzione.
A questo proposito, i motori a corrente alternata sono migliori dei motori a corrente continua, i motori asincroni a corrente alternata sono migliori dei motori sincroni a corrente alternata e i motori asincroni a gabbia di scoiattolo sono migliori dei motori asincroni avvolti. I motori asincroni a gabbia di scoiattolo sono preferiti per i macchinari di produzione a funzionamento continuo con carichi stabili e senza requisiti speciali per l'avviamento e la frenata, e sono ampiamente utilizzati in macchinari, pompe dell'acqua e ventilatori. I motori asincroni avvolti sono consigliati per macchinari di produzione con avviamenti e frenate frequenti e che richiedono grandi coppie di avviamento e frenata, come gru a ponte, montacarichi da miniera, compressori d'aria e laminatoi irreversibili.
I motori sincroni sono ideali per le applicazioni che non richiedono la regolazione della velocità, la velocità costante o il miglioramento del fattore di potenza, come le pompe per acqua di media e grande capacità, i compressori d'aria, gli argani e i mulini.
Per le macchine di produzione con un intervallo di regolazione della velocità superiore a 1:3 e che richiedono una regolazione continua, stabile e uniforme della velocità, si consiglia di utilizzare motori a corrente continua a eccitazione separata, motori asincroni a gabbia di scoiattolo o motori sincroni con regolazione della velocità a frequenza variabile, come ad esempio le macchine utensili di precisione di grandi dimensioni, le pialle a portale, i laminatoi per acciaio e i paranchi.
I macchinari di produzione che richiedono una grande coppia di avviamento e caratteristiche meccaniche morbide dovrebbero utilizzare motori a corrente continua con eccitazione in serie o composta, come tram, locomotive elettriche e gru pesanti.
II. Potenza nominale
La potenza nominale di un motore si riferisce alla sua potenza di uscita, nota anche come potenza o capacità dell'albero. È il parametro chiave che quantifica la capacità di carico del motore e deve essere fornito al momento della scelta del motore. Altri fattori importanti nella scelta del motore sono la tensione nominale, la corrente nominale, il fattore di potenza (cos θ) e l'efficienza (η).
L'obiettivo di una corretta selezione della capacità del motore è quello di determinare la potenza del motore in modo economico e ragionevole, garantendo che possa soddisfare i requisiti di carico del macchinario di produzione. Se la potenza è troppo elevata, l'investimento per l'apparecchiatura aumenta, con conseguenti sprechi e un basso rendimento e fattore di potenza del motore CA. D'altra parte, se la potenza è troppo bassa, il motore si surriscalda e subisce danni prematuri.
I principali fattori che determinano la potenza del motore sono:
- Riscaldamento del motore e aumento della temperatura,
- La capacità di sovraccarico di breve durata consentita, e
- La capacità di avviamento dei motori asincroni a gabbia di scoiattolo.
Per selezionare la potenza nominale, la potenza di carico viene prima calcolata in base al riscaldamento del macchinario, all'aumento di temperatura e ai requisiti di carico. Quindi, la potenza nominale viene preselezionata in base alla potenza di carico, al sistema di lavoro e ai requisiti di sovraccarico. Il riscaldamento, la capacità di sovraccarico e la capacità di avviamento devono essere verificati per assicurarsi che siano qualificati.
In caso contrario, il motore deve essere riselezionato fino a quando tutti i criteri sono soddisfatti. Anche il sistema di lavoro è un fattore richiesto: se non viene specificato, viene adottato per default il sistema di lavoro convenzionale S1. I motori con requisiti di sovraccarico devono anche fornire un multiplo di sovraccarico e un tempo di funzionamento corrispondente.
Quando un motore asincrono a gabbia di scoiattolo aziona un ventilatore o un altro carico ad alto momento di inerzia, è necessario fornire il momento di inerzia del carico e la curva del momento di resistenza all'avviamento per verificare la capacità di avviamento.
La selezione della potenza nominale presuppone una temperatura ambiente standard di 40 ℃. Se la temperatura ambiente cambia, la potenza nominale deve essere corretta. La temperatura ambiente deve essere verificata in aree con condizioni climatiche estreme, come l'India, dove la temperatura ambiente può raggiungere i 50 ℃.
Anche l'altitudine elevata può influire sulla potenza del motore. aumento della temperatura del motore e una minore potenza di uscita. Il fenomeno della corona deve essere considerato anche per i motori utilizzati ad alta quota.
A titolo di riferimento, si riportano di seguito alcuni esempi di gamme di potenza dei motori presenti sul mercato attuale:
- Motore CC: ZD9350 (mulino) 9350kW
- Motore asincrono: Gabbia di scoiattolo YGF1120-4 (ventilatore dell'altoforno) 28000kW
- Tipo di avvolgimento yrkk1000-6 (mulino grezzo) 7400kw
- Motore sincrono: TWS36000-4 (ventilatore dell'altoforno) 36000kW (l'unità di prova raggiunge 40000kW)
III. Tensione nominale
La tensione nominale di un motore si riferisce alla tensione di rete nelle condizioni operative nominali.
La scelta della tensione nominale del motore dipende dalla tensione di alimentazione della rete elettrica e dalla capacità del motore.
La scelta del livello di tensione per un motore CA dipende principalmente dal livello di tensione dell'alimentazione nel luogo di utilizzo.
In genere, la rete a bassa tensione funziona a 380V, quindi la tensione nominale può essere 380V (connessione Y o Δ), 220/380V (connessione Δ/Y) o 380/660V (connessione Δ/Y).
Quando la potenza di un motore a bassa tensione raggiunge un certo livello (ad esempio 300KW/380V), diventa difficile aumentare la corrente a causa dei limiti della capacità portante del conduttore, oppure diventa troppo costoso farlo.
Aumentando la tensione si ottiene una maggiore potenza.
La tensione di alimentazione delle reti elettriche ad alta tensione è tipicamente di 6000V o 10000V, anche se in altri Paesi si utilizzano livelli di tensione di 3300V, 6600V e 11000V.
I motori ad alta tensione hanno il vantaggio di un'elevata potenza e di una forte resistenza agli urti, ma il loro svantaggio è che hanno una grande inerzia e sono difficili da avviare e arrestare.
La tensione nominale di un motore CC deve corrispondere alla tensione di alimentazione.
I livelli di tensione comuni per i motori a corrente continua sono 110V, 220V e 440V.
Il livello di tensione più comunemente utilizzato è 220V, ma i motori ad alta potenza possono essere portati a 600-1000V.
Quando la tensione di alimentazione CA è di 380 V e per l'alimentazione viene utilizzato un circuito raddrizzatore trifase a ponte controllato al silicio, la tensione nominale del motore CC deve essere di 440 V.
Quando si utilizza un raddrizzatore trifase a semionda controllato al silicio per l'alimentazione, la tensione nominale del motore CC deve essere pari a 220 V.
IV. Velocità nominale
La velocità nominale del motore si riferisce alla velocità di funzionamento in condizioni normali. Sia il motore che la macchina che aziona hanno una velocità nominale.
Quando si sceglie la velocità del motore, è importante tenere presente che non deve essere troppo bassa, poiché ciò comporta un motore più grande con più fasi e un prezzo più elevato. D'altra parte, la velocità non deve essere troppo elevata, perché potrebbe rendere il meccanismo di trasmissione complicato e difficile da mantenere.
È inoltre importante notare che quando la potenza è costante, la coppia del motore è inversamente proporzionale alla velocità. Di conseguenza, chi ha bassi requisiti di avviamento e frenatura può confrontare le diverse velocità nominali in termini di investimento iniziale, ingombro dell'apparecchiatura e costi di manutenzione prima di determinare la velocità nominale ideale.
Per le applicazioni che richiedono frequenti avviamenti, frenate e inversioni di marcia, il rapporto di velocità e la velocità nominale del motore devono essere scelti in base alla minimizzazione delle perdite durante il processo di transizione, piuttosto che considerare solo l'investimento iniziale. Ad esempio, i motori per ascensori richiedono frequenti rotazioni in avanti e indietro con una coppia elevata, quindi hanno una bassa velocità e sono ingombranti e costosi.
Quando la velocità del motore è elevata, è fondamentale considerare la velocità critica del motore. Durante il funzionamento, il rotore può vibrare e la sua ampiezza aumenta con la velocità. A una certa velocità, l'ampiezza raggiunge un valore massimo (noto come risonanza) e l'ampiezza diminuisce e si stabilizza in un certo intervallo quando la velocità aumenta ulteriormente.
Questa velocità con l'ampiezza massima è chiamata velocità critica del rotore ed è uguale alla sua velocità di rotazione. frequenza naturale. Se il rotore funziona alla sua velocità critica, può provocare vibrazioni violente e una significativa flessione dell'albero, con conseguenti deformazioni a lungo termine o addirittura rotture.
In genere, la velocità critica di primo ordine del motore è superiore a 1500 RPM, quindi non è un problema per i motori convenzionali a bassa velocità. Tuttavia, per i motori a 2 poli ad alta velocità, se la velocità nominale è prossima a 3000 RPM, è necessario considerare l'impatto della velocità critica e non far funzionare il motore alla sua velocità critica per periodi prolungati.
Impacchettare
In genere, le specifiche di un motore possono essere stimate fornendo informazioni sul tipo di carico da azionare, sulla potenza nominale, sulla tensione e sulla velocità. Tuttavia, questi parametri di base non sono sufficienti a soddisfare completamente i requisiti del carico.
Altri parametri da considerare sono la frequenza, il sistema operativo, i requisiti di sovraccarico, i gradi di isolamento e protezione, il momento d'inerzia, la curva del momento di resistenza del carico, il metodo di installazione, la temperatura ambiente, l'altitudine e i requisiti esterni. Questi parametri devono essere specificati in base all'applicazione specifica.
V. Principi di selezione del motore
I criteri principali per la selezione dei motori includono:
- Tipo di motore, tensione e velocità;
- La varietà di tipi di motore;
- Scelta del tipo di protezione del motore;
- Tensione e velocità del motore.
La scelta del motore deve basarsi sulle seguenti condizioni:
- Il tipo di alimentazione del motore, come ad esempio monofase, trifase, corrente continua, ecc.
- L'ambiente di funzionamento del motore. Se ci sono particolarità nell'ambiente di funzionamento, come umidità, basse temperature, corrosione chimica, polvere, ecc.
- Il metodo di funzionamento del motore. Se funziona in modo continuo, intermittente o con un altro metodo.
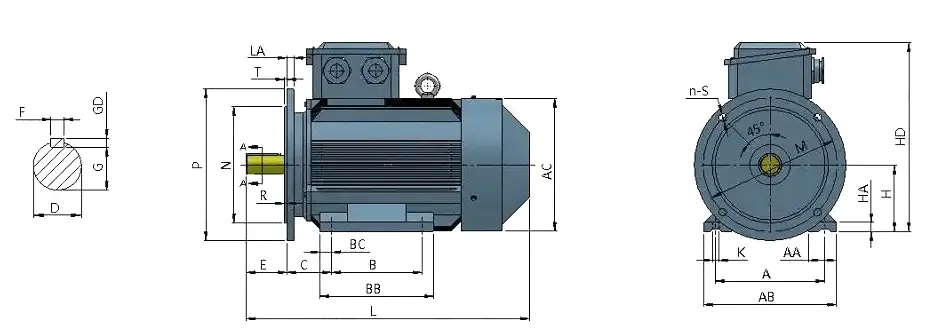
- Il metodo di montaggio del motore, come il montaggio verticale, il montaggio orizzontale, ecc.
- La potenza e la velocità del motore. La potenza e la velocità devono soddisfare i requisiti del carico.
- Altri fattori, come la necessità di regolare la velocità, la presenza di requisiti di controllo speciali, il tipo di carico, ecc.
1. Scelta del tipo di motore, della tensione e della velocità
Quando si sceglie il tipo di motore, la tensione e la velocità, i requisiti della trasmissione di potenza della macchina di produzione, come la frequenza di avvio e di arresto, l'eventuale necessità di regolare la velocità, ecc. Questo determinerà il tipo di corrente per il motore, cioè se scegliere un motore a corrente alternata o un motore a corrente continua.
Successivamente, è necessario selezionare la tensione nominale del motore in base all'ambiente di alimentazione. Quindi, la velocità nominale deve essere selezionata in base alla velocità richiesta dalla macchina di produzione e ai requisiti dell'apparecchiatura di trasmissione.
Successivamente, la struttura e il tipo di protezione del motore devono essere determinati in base alla posizione di montaggio del motore e all'ambiente circostante.
Infine, la potenza nominale (capacità) del motore deve essere determinata dalla potenza richiesta dalla macchina di produzione.
Dopo aver considerato tutti questi fattori, selezionare dal catalogo dei prodotti un motore che soddisfi questi requisiti. Se i motori elencati nel catalogo non sono in grado di soddisfare i requisiti speciali della macchina di produzione, è possibile effettuare un ordine personalizzato presso il produttore del motore.
2. Scelta del tipo di motore
La scelta del motore viene considerata sotto l'aspetto della corrente alternata o continua, delle caratteristiche della macchina, della regolazione della velocità e delle capacità di avviamento, della protezione e del prezzo. Pertanto, nella scelta si devono osservare le seguenti linee guida:
(1) In primo luogo, è opportuno scegliere un motore a induzione trifase a gabbia di scoiattolo.
Ciò è dovuto alla sua semplicità, durata, affidabilità, basso costo e facilità di manutenzione. Tuttavia, i suoi svantaggi sono la difficile regolazione della velocità, il basso fattore di potenza, l'elevata corrente di avviamento e la ridotta coppia di spunto. Pertanto, è adatto principalmente per macchine di produzione generiche e azionamenti con caratteristiche della macchina relativamente rigide e senza particolari requisiti di regolazione della velocità, come macchine utensili generiche e macchine di produzione come pompe dell'acqua o ventilatori con potenza inferiore a 100KW.
(2) Il prezzo dei motori a rotore avvolto è superiore a quello dei motori a gabbia.
Tuttavia, le caratteristiche della macchina possono essere regolate aggiungendo una resistenza al rotore, limitando così la corrente di avviamento e aumentando la coppia di avviamento. Pertanto, è adatto a situazioni in cui la capacità di alimentazione è ridotta, la potenza del motore è elevata o è necessaria la regolazione della velocità, come ad esempio alcune apparecchiature di sollevamento, ascensori e montacarichi, presse per la forgiaturae lo spostamento della traversa di macchine utensili pesanti.
(3) Quando il campo di regolazione della velocità è inferiore a 1:10 ed è richiesta una regolazione regolare della velocità, è possibile selezionare prima un motore a scorrimento.
Questo motore può essere suddiviso in orizzontale e verticale in base alla posizione di montaggio. L'albero di un motore orizzontale è assemblato orizzontalmente, mentre l'albero di un motore verticale è assemblato verticalmente in alta quota, quindi i due tipi di motori non possono essere utilizzati in modo intercambiabile. In circostanze normali, si dovrebbe scegliere un motore orizzontale ogni volta che è possibile, mentre un motore verticale dovrebbe essere preso in considerazione solo quando è richiesto un funzionamento verticale (come nel caso delle pompe verticali per pozzi profondi e delle pompe per pozzi verticali). perforazione per semplificare l'assemblaggio della trasmissione (perché è più costosa).
3. Selezione dei tipi di protezione del motore
Esistono diversi tipi di protezione per i motori e il tipo appropriato deve essere scelto in base ai diversi ambienti operativi. I tipi di protezione per i motori sono aperti, protettivi, chiusi, antideflagranti, sommergibili e molti altri. Il tipo aperto viene solitamente scelto per gli ambienti quotidiani a causa della sua economicità, ma è adatto solo a condizioni asciutte e pulite.
Per ambienti umidi, soggetti a corrosione, polverosi, infiammabili o corrosivi, è opportuno scegliere un tipo chiuso. Se l'ambiente è polveroso e dannoso per l'isolamento del motore, ma può essere pulito con aria compressa, si può scegliere un tipo protettivo. Per i motori delle pompe sommerse, è necessario scegliere un tipo completamente sigillato per garantire che l'umidità non penetri durante il funzionamento sott'acqua. In ambienti a rischio di incendio o di esplosione, è necessario scegliere un tipo antideflagrante.
4. Selezione della tensione e della velocità del motore
Quando si sceglie un motore per un macchinario di produzione esistente in un ambiente industriale, la tensione nominale del motore deve essere equivalente alla tensione di distribuzione dello stabilimento. Per le nuove fabbriche, la scelta della tensione del motore deve essere in linea con la tensione di distribuzione scelta.
La decisione deve essere presa in base all'opzione economicamente più vantaggiosa dopo aver confrontato i diversi livelli di tensione. Lo standard di bassa tensione nel nostro Paese è 220/380V, mentre l'alta tensione è per lo più 10KV. La maggior parte dei motori con capacità minori sono ad alta tensione, con tensioni nominali di 220/380V (metodo di connessione D/Y) e 380/660V (metodo di connessione D/Y). Quando la capacità del motore supera i 200KW circa, si consiglia di scegliere motori ad alta tensione da 3KV, 6KV o 10KV.
La scelta della velocità (nominale) del motore deve essere effettuata in base ai requisiti del macchinario di produzione da azionare e alle condizioni del gruppo di trasmissione. Il numero di giri del motore al minuto comprende solitamente 3000, 1500, 1000, 750 e 600.
La velocità nominale di un motore asincrono è in genere da 2% a 5% inferiore a queste velocità a causa dello scorrimento. Dal punto di vista della produzione, se un motore della stessa potenza ha una velocità nominale più elevata, la sua forma di coppia elettromagnetica sarà più piccola, riducendo così il costo e il peso.
Inoltre, i motori ad alta velocità hanno fattori di potenza ed efficienza più elevati rispetto ai motori a bassa velocità.
La scelta di un motore con una velocità maggiore è più economica. Tuttavia, se ciò comporta una differenza di velocità significativa tra il motore e la macchina azionata, saranno necessari più stadi di trasmissione per l'aumento della velocità, con conseguente aumento dei costi delle apparecchiature e del consumo energetico. La scelta ottimale deve essere fatta dopo un attento confronto.
La maggior parte dei motori che utilizziamo sono motori a 4 poli da 1500 giri/min. perché questi motori hanno un'ampia gamma di applicazioni e fattori di potenza ed efficienza operativa superiori.