Motore passo-passo
Principio di funzionamento del motore passo-passo
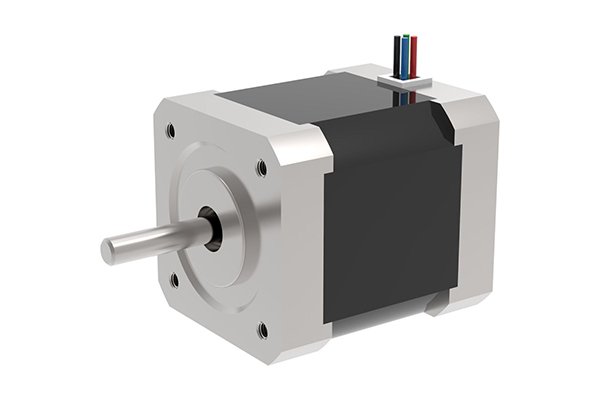
Un motore passo-passo, un tipo di motore specificamente progettato per il controllo, converte gli impulsi elettrici in spostamenti angolari.
Quando il driver passo-passo riceve un segnale di impulso, fa ruotare il motore passo-passo a un angolo fisso predeterminato, noto come "angolo di passo", nella direzione specificata.
Il motore ruota passo-passo con un angolo di passo fisso.
Il posizionamento preciso può essere ottenuto controllando il numero di impulsi, mentre la regolazione della velocità e dell'accelerazione della rotazione del motore può essere ottenuta controllando la frequenza degli impulsi.
L'inversione del senso di rotazione del motore può essere ottenuta modificando la sequenza di alimentazione degli avvolgimenti.
Il principio di funzionamento del driver per motori passo-passo
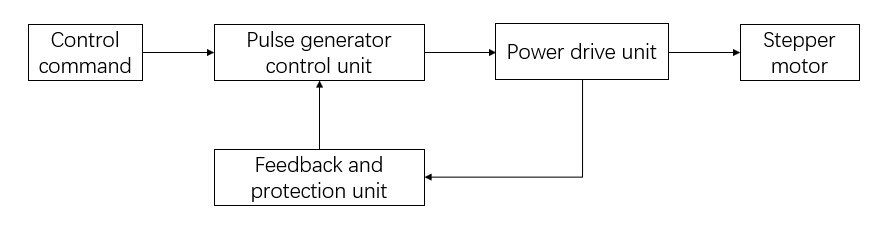
Per il funzionamento di un motore passo-passo è necessario un apposito driver per motori passo-passo. Questo driver è composto da un'unità di controllo degli impulsi, un'unità di azionamento della potenza e un'unità di protezione.
L'unità di alimentazione amplifica gli impulsi generati dall'unità di controllo degli impulsi ed è collegata direttamente al motore passo-passo, fungendo da interfaccia di alimentazione tra il motore passo-passo e il microcontrollore.
L'unità di istruzione di controllo riceve i segnali di impulso e direzione e genera una serie di impulsi corrispondenti, che vengono poi trasmessi al motore passo-passo attraverso l'unità di azionamento di potenza.
Il motore passo-passo ruota quindi un angolo di passo impostato nella direzione indicata.
Il motore passo-passo presenta diverse specifiche tecniche fondamentali, come la coppia statica massima, frequenza di partenzae la frequenza di funzionamento.
In generale, più piccolo è l'angolo di passo, maggiore è la coppia statica massima e più alte sono le frequenze di avvio e di funzionamento.
Pertanto, la modalità di funzionamento pone una forte enfasi sulla tecnologia di azionamento della suddivisione.
Questo metodo migliora la coppia e la risoluzione del motore passo-passo ed elimina completamente le oscillazioni a bassa frequenza.
Di conseguenza, le prestazioni delle unità di suddivisione sono superiori a quelle di altri tipi di unità.
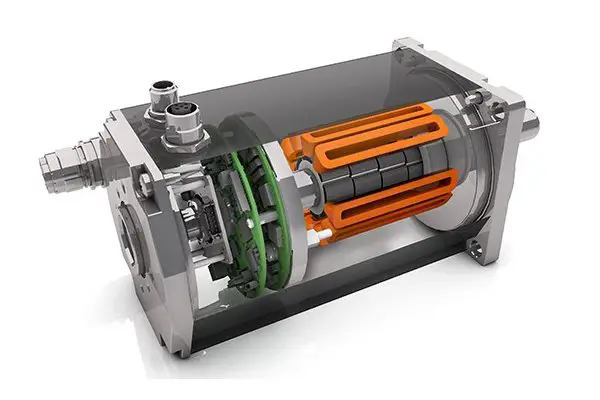
Il rotore di un servomotore è un magnete permanente. Il driver controlla l'elettricità trifase U/V/W per creare un campo elettromagnetico, facendo ruotare il rotore sotto l'influenza di questo campo magnetico. L'encoder del motore fornisce segnali di feedback al driver, che regola l'angolo di rotazione del rotore in base al valore di feedback e al valore target.
Servomotore
Il principio di funzionamento del servomotore
Il servomotore, detto anche motore esecutivo, viene utilizzato come attuatore nei sistemi di controllo automatico per convertire i segnali elettrici ricevuti in spostamenti angolari o velocità angolari sull'albero del motore.
I servomotori sono disponibili in due varianti: CC e CA.
Quando un servomotore riceve un impulso, ruota l'angolo corrispondente per produrre lo spostamento. Questo perché il servomotore stesso emette impulsi, e ogni angolo di rotazione emette un numero corrispondente di impulsi che formano un ciclo chiuso con gli impulsi ricevuti dal servomotore.
Ciò consente al sistema di monitorare il numero di impulsi inviati al servomotore e il numero di impulsi ricevuti, consentendo un controllo preciso e un posizionamento accurato.
In termini di prestazioni, i servomotori CA sono superiori ai servomotori CC. I servomotori in c.a. utilizzano il controllo dell'onda sinusoidale, con conseguente basso ripple di coppia ed elevata capacità.
I servomotori a corrente continua, invece, utilizzano un controllo a onda trapezoidale e hanno prestazioni relativamente scarse.
Tuttavia, i servomotori brushless nei servomotori CC hanno prestazioni migliori rispetto ai servomotori a spazzole.
Il principio di funzionamento del servomotore
L'interno di un servomotore contiene un rotore a magneti permanenti.
L'attuatore controlla l'elettricità trifase U/V/W per generare un campo elettromagnetico che fa ruotare il rotore.
Inoltre, l'encoder del motore fornisce segnali di feedback al driver.
Il driver regola l'angolo di rotazione del rotore in base al valore di feedback e al valore target desiderato.
Azionamento del servomotore CC a spazzole:
Il principio di funzionamento del motore è simile a quello di un motore CC standard.
L'attuatore ha una struttura a tre loop, composta da loop di corrente, loop di velocità e loop di posizione, disposti in ordine dall'interno verso l'esterno.
L'uscita dell'anello di corrente controlla la tensione di armatura del motore.
L'ingresso del loop di corrente è l'uscita PID del loop di velocità, l'ingresso del loop di velocità è l'uscita PID del loop di posizione e l'ingresso del loop di posizione è l'ingresso specificato.
Il diagramma di controllo è illustrato sopra.
Azionamento del servomotore DC senza spazzole:
La fonte di alimentazione è in corrente continua, trasformata in corrente alternata U/V/W da un inverter trifase interno.
Anche il driver impiega una struttura di controllo a tre loop (loop di corrente, loop di velocità, loop di posizione) e il suo principio di controllo è lo stesso descritto in precedenza.
Azionamento del servomotore in c.a:
Il sistema può essere suddiviso in due moduli separati: il pannello di alimentazione e il pannello di controllo, ciascuno con funzioni distinte.
Il pannello di controllo emette segnali PWM attraverso un algoritmo corrispondente, che funge da circuito di pilotaggio per il segnale di azionamento, per modificare la potenza di uscita dell'inverter e ottenere il controllo del servomotore sincrono trifase a magneti permanenti.
L'unità di azionamento della potenza converte innanzitutto l'elettricità trifase o l'elettricità comunale in ingresso in elettricità a corrente continua attraverso un circuito raddrizzatore trifase a ponte intero.
Il servomotore sincrono trifase a magneti permanenti viene quindi azionato dal commutatore di un inverter trifase a tensione sinusoidale PWM, dopo il raddrizzamento dell'elettricità trifase o comunale.
Questo processo è semplicemente una conversione AC-DC-AC.
L'unità di controllo è il cuore dell'intero servosistema CA ed esegue il controllo della posizione del sistema, il controllo della velocità, il controllo della coppia e il controllo della corrente.
Confronto delle prestazioni del servomotore e del motore passo-passo
Precisione del controllo
Più fasi e battute ha un motore passo-passo, maggiore è la sua precisione.
Il servomotore ottiene un feedback dal proprio encoder e più scale ha l'encoder, maggiore è la sua precisione.
Caratteristiche a bassa frequenza
I motori passo-passo sono soggetti a vibrazioni a bassa frequenza a basse velocità.
Per contrastare questo fenomeno, il funzionamento a bassa velocità impiega spesso una tecnologia di smorzamento o di suddivisione.
Al contrario, i servomotori funzionano senza vibrazioni, anche a basse velocità.
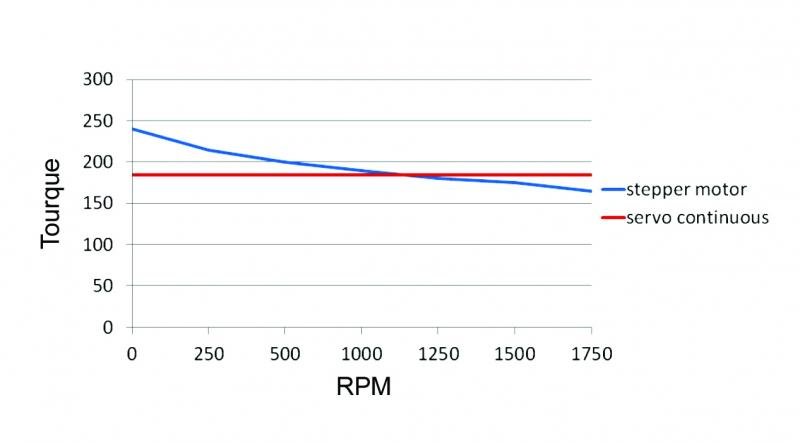
Caratteristica della coppia-frequenza
La coppia di uscita di un motore passo-passo diminuisce con l'aumentare della velocità e si riduce notevolmente alle alte velocità.
Al contrario, un servomotore fornisce una coppia costante alla sua velocità nominale e una potenza costante alla sua velocità nominale.
Capacità di sovraccarico
Un motore passo-passo non ha capacità di sovraccarico, mentre un servomotore ha una forte capacità di sovraccarico.
Prestazioni operative
I motori passo-passo funzionano con un controllo ad anello aperto, il che li rende suscettibili di perdere il passo o di interrompere la rotazione se la frequenza di avvio è troppo alta o il carico è troppo pesante. Se la velocità è troppo elevata, può anche verificarsi un overshooting.
D'altra parte, il sistema di servoazionamento CA utilizza un controllo ad anello chiuso. Il driver del servomotore campiona direttamente il segnale di feedback dell'encoder del motore, formando anelli interni di controllo della posizione e della velocità. Di conseguenza, i motori passo-passo hanno meno probabilità di perdere il passo o di andare in overshooting, rendendo le prestazioni di controllo più affidabili.
Velocità di risposta Prestazioni
I motori passo-passo impiegano centinaia di millisecondi per accelerare da uno stato statico alla velocità operativa.
In confronto, i servosistemi in c.a. hanno prestazioni di accelerazione eccellenti, che in genere richiedono solo pochi millisecondi, rendendoli adatti ad applicazioni che richiedono avviamenti e arresti rapidi.