サーボドライバセットアップガイド
サーボドライバをどのように設定すれば最高のパフォーマンスを発揮できるのか、疑問に思ったことはありませんか?このガイドでは、位置制御から速度制御まで、ゲイン・パラメータの調整について知っておくべきことをすべて取り上げています。
シンプルなカムとフォロワーシステムは、複雑な機械の効率的で正確な動きにどのようにつながるのでしょうか?この記事では、カム駆動機構設計の複雑さを探求し、さまざまなタイプのカムとフォロワー、それらの運動経路、および最適な性能を達成する方法を説明します。基本的なコンポーネントから高度な設計手法まで、読者は高効率なカムシステムを構築するための貴重な洞察を得ることができます。実用的なヒントと詳細な解析により、エンジニアリング・プロジェクトにおけるカム機構の理解と応用が深まります。
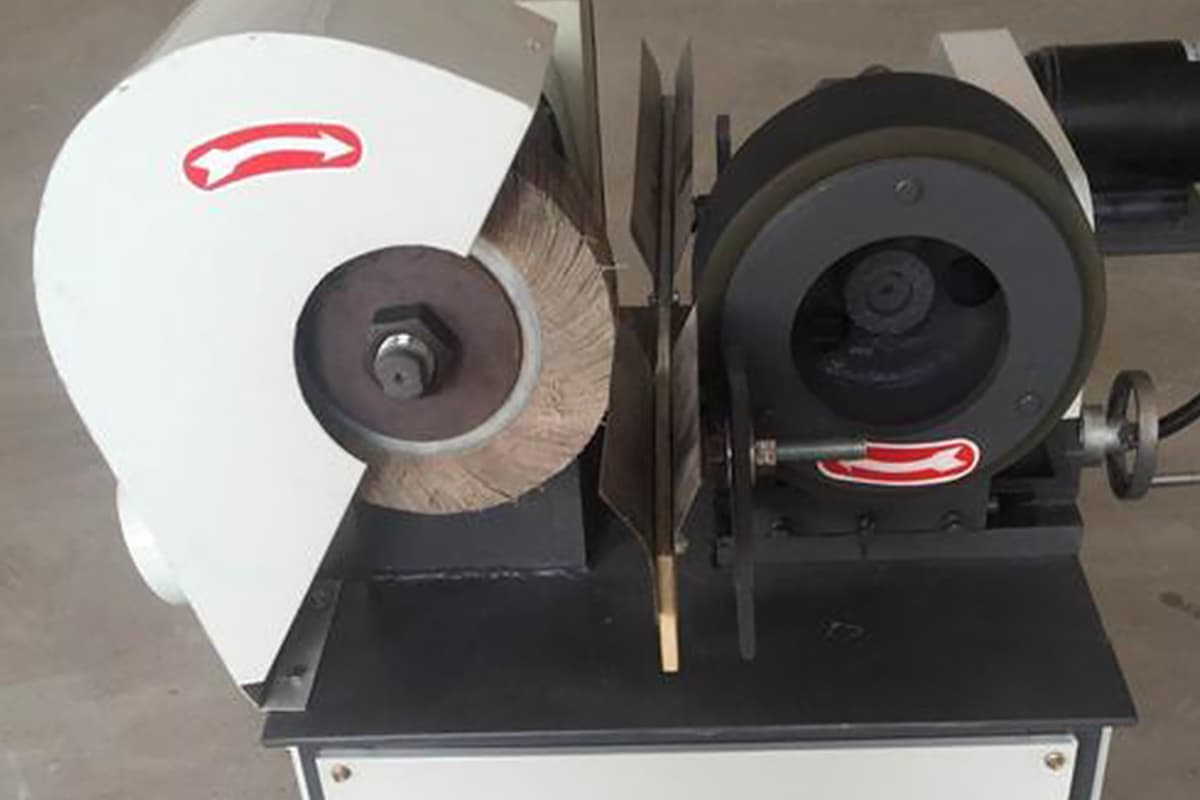
カム機構は通常、カムとフォロワーという2つの可動部からなり、両者はフレームに固定されている。カム装置は非常に汎用性が高く、ほとんどすべての任意の動きを生成することができます。
カムは、曲面や溝を持つ部品と定義することができる。カムを振ったり回転させたりすることで、別の部品であるフォロワーがあらかじめ設定された動きを提供することができる。フォロワーの経路は、往復運動を得るために、ほとんどの場合スロットに限定されます。
リターンストロークでは自重に頼ることもあるが、正確な動きを実現するためにバネを復帰力として使う機構もある。また、ガイドレールを使って特定の経路を移動するものもある。
カムの形状によって、ディスクカム、ムービングカム、シリンドリカルカムの3種類に分けられる。
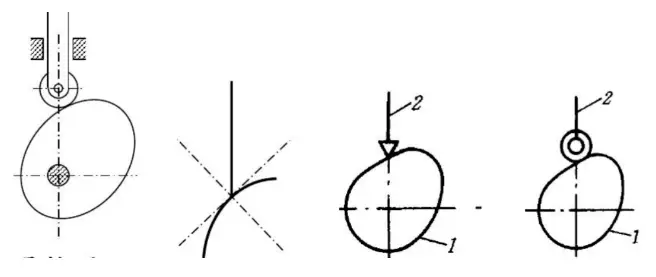
フォロワーはその先端の形状によって、尖ったフォロワー、ローラーフォロワー、底が平らなフォロワーの3種類に分けられる。
シャープノーズフォロワーとカムの接触が点接触であるため、応力が大きく摩耗が早いため、衝撃の大きい低速カム機構には適さない。ローラーフォロワは、これらの欠点を克服することができます。
伝達効率を向上させるために、底面の力の方向に対して垂直な平底のフォロワーを導入することもできる。
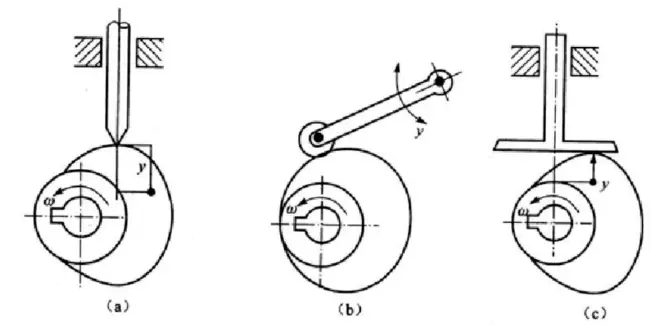
先に考えた伝達部品は直進運動という形だが、振動運動という形もある。前者を直動フォロワー、後者を揺動フォロワーと呼ぶ。
また、カムの回転中心をフォロワーの動きの直線経路上にないようにすることもできる。このとき、オフセットと呼ぶ。従って、回転中心がフォロアの運動の直線経路上にある場合は、同心円と呼ぶことができる。
さらに、高応力のロック関係を維持する方法を検討し、メカニズムを幾何学的ロックと力によるロックに分けることもできる。
カムの形状、フォロワーの端部、フォロワーの移動パターンを組み合わせることで、設計された機構の名称を決定することができる。例えば、鋭鼻直動フォロワー付きディスクカム(フォロワーとカムの相対位置+フォロワーの端部+フォロワーの移動パターン+カムの形状)。
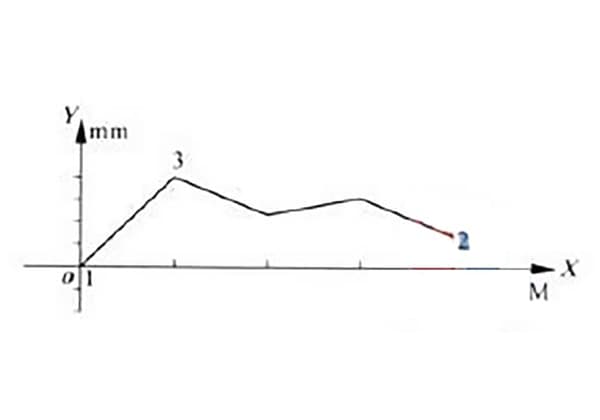
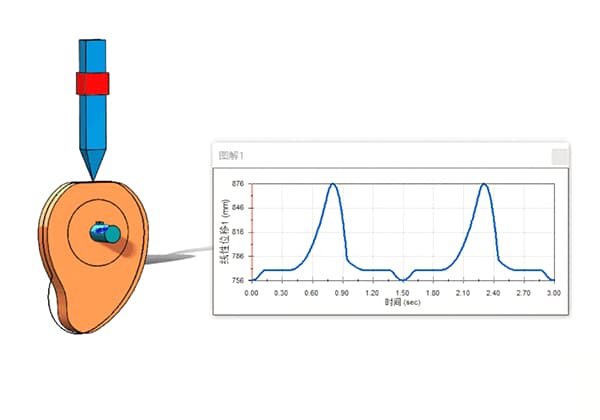
まず、カムとその上に置かれたフォロワーがある。カムが角速度ωでφs度回転しても、フォロアは動かない。このとき、φsをドエル角と呼び、これに対応する円をベース円と呼ぶ。同様に、この円の半径をベース円半径r0と呼ぶ。
このとき、φをストローク角、hをストロークと呼ぶ。
その後、フォロワーがh点に到達したら、一定時間そのままにしておく。その間、カムはリフト角に相当するφs'だけ回転する。
最後に、フォロワーを元の位置に戻す必要があるので、カムをφ'だけ回転させる。この時、フォロアーは始点に戻る。φ'を戻り角と呼ぶ。
カム機構を設計する方法には、主に図式的な方法と解析的な方法の2つがある。
前者は比較的簡単で、所望のプッシュモーションダイアグラムを提供し、ダイアグラムによって提供される角度とプロセスの関係に基づいて対応する輪郭曲線を求めるだけである。
精度はあまり高くない。後者は計算式であり、その計算は比較的複雑で、高い精度が要求されるカム機構の設計に適している。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。