ブラシレスDCモーターと永久磁石同期モーターの比較
ブラシレスDCモーターは永久磁石同期モーターと何が違うのか、不思議に思ったことはありませんか?この記事では、この2種類のモータの魅力的な世界に飛び込み、その原理や特徴を探ります。
ブラシレスモーターがブラシモーターより優れている理由を不思議に思ったことはありませんか?ブラシレスモーターは、電子整流のおかげで摩擦や摩耗が少なく、効率と耐久性に優れています。一方、ブラシモーターはシンプルでコスト効率に優れていますが、ブラシの摩擦によるメンテナンスの問題があります。この記事では、両モーターの異なる原理、性能、用途について詳しく説明し、それぞれの長所と短所を理解できるようにします。これらの違いが、速度制御から運転安定性まで、あらゆるものにどのような影響を与えるかをご覧ください。どのモータがお客様のニーズに最も適しているのか、またその理由は何なのか、ぜひご覧ください。
ブラシレスDCモータは、モータ本体とドライバで構成されるメカトロニクス製品である。
可変周波数速度制御で高負荷時に始動するためにローターに始動巻線を必要とする同期モーターとは異なり、ブラシレスDCモーターは自己制御モードで動作します。負荷が急変しても発振したり、調子を崩したりすることはありません。
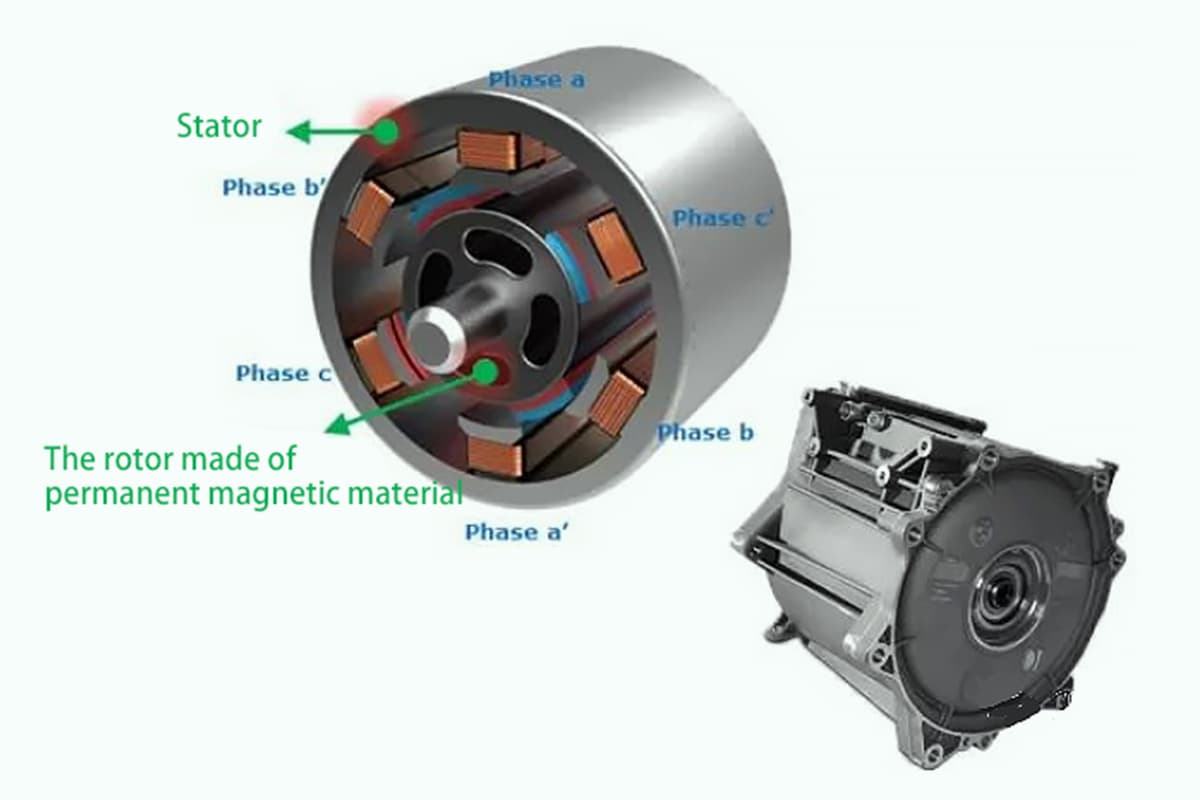
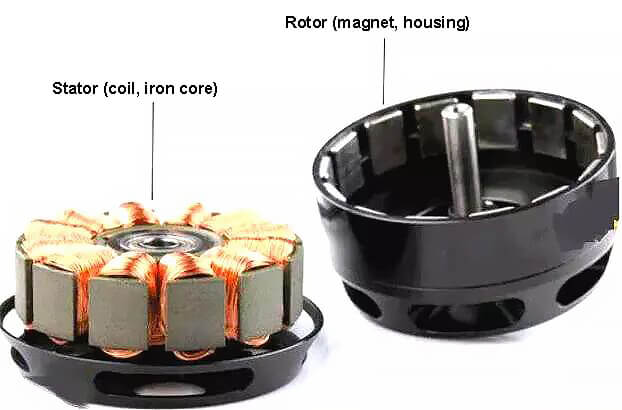
中小型ブラシレスDCモーターの大半は、磁気エネルギーレベルが高い希土類ネオジム鉄ボロン(Nd-Fe-B)磁石を利用している。
その結果、希土類永久磁石ブラシレスモーターは、同じ容量の三相非同期モーターよりもフレームサイズが小さくなる。
ブラシ・モーターは、ブラシ装置を使用して電気エネル ギーを機械エネルギーに(モーターとして)、または機械エネル ギーを電気エネルギーに(発電機として)変換する回転モーターである。ブラシレス・モーターとは異なり、ブラシ装置は電圧と電流を導入または引き込むために使用される。
ブラシモーターはすべてのモーターの基礎であり、高速スタート、タイムリーなブレーキ、広い範囲でのスムーズな速度調整、比較的簡単な制御回路など、いくつかの有利な特徴を持っています。
ブラシ付きモーターは最初のものだ。 モーターの種類 中学校の物理の授業では、モーターを説明するモデルとしてよく使われる。
ブラシ付きモーターの主な構成部品は、ステーター、ローター、ブラシである。
回転トルクは回転磁界によって発生し、運動エネルギーを出力することができる。
ブラシと整流子は常に接触・摩擦しており、回転中の導通・転流という重要な役割を担っている。
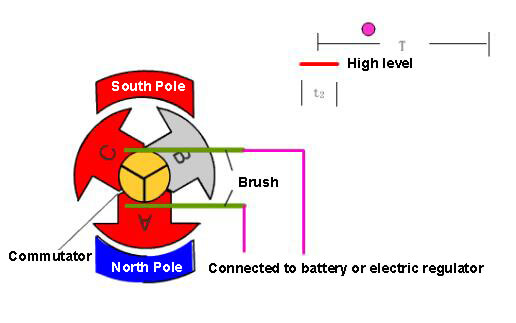
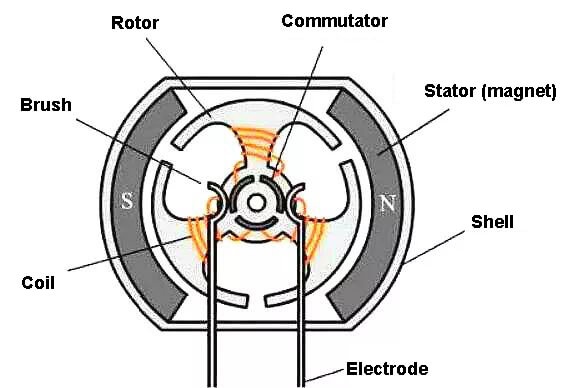
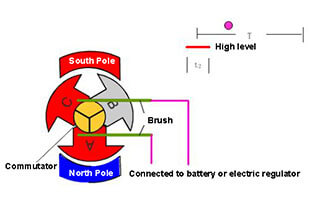
ブラシモーターは機械的整流を利用し、磁極は静止したままコイルが回転する。
運転中、コイルと整流子は回転し、磁性鋼とカーボンブラシは静止している。整流子とブラシがモーターと一緒に回転することで、コイル電流の向きを交互に変えることができます。
ブラシモーターでは、各コイル群の2つの電力入力端子をリング状に配置する。電力入力端子は絶縁材料によって互いに分離され、モーター軸に接続された円筒状に形成される。
2本のカーボン・エレメントでできた小さな柱(カーボン・ブラシ)が電源の通過に使用される。カーボンブラシは、バネ圧の作用で2つの特定の固定位置から移動する。コイル群への通電は、上部のコイル電源入力リングシリンダーの2点を押すことで実現する。
モーターが回転すると、異なるコイルまたは同じコイルの異なる極が異なるタイミングで通電される。これにより、コイルから発生する磁界のN-S極と、最も近い永久磁石固定子のN-S極との間に適切な角度差が生じる。磁界は互いに引き合ったり反発したりして力を発生させ、モーターを回転させる。
カーボンブラシはコイルコネクター上を摺動し、物体表面のブラシに似ていることから、カーボン「ブラシ」と呼ばれている。しかし、両者の摺動により擦れや欠損が生じ、定期的なカーボンブラシの交換が必要となる。
さらに、カーボンブラシとコイルコネクタを交互にオン・オフすると、電気火花が発生し、電磁波の遮断が起こり、電子機器に干渉する。
ブラシレスモーターでは、整流はコントローラー内の制御回路によって行われる。一般的にはホールセンサーとコントローラーが使用されますが、磁気エンコーダーのような高度な技術が使用されることもあります。
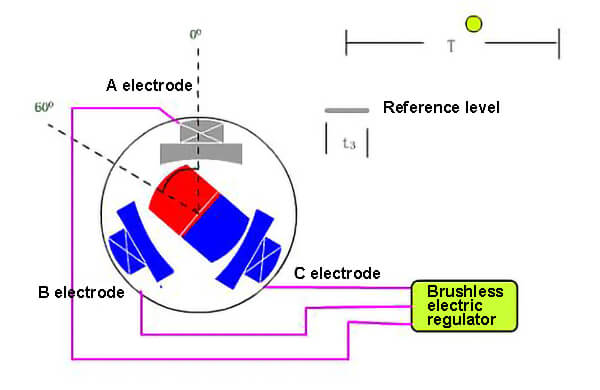
ブラシレス・モーターは電子整流を採用しており、磁極が回転している間はコイルは静止している。
永久磁石の磁極の位置を検出するために、ブラシレスモーターはホール素子を組み込んだ一連の電子機器を利用する。
この検出に基づいて、電子回路はコイルに流れる電流の方向を適時切り替え、モーターが正しい方向に磁力を発生させて駆動するようにする。
ブラシレスモーターでは、ブラシモーターの欠点が解消されている。
これらの回路はモーター・コントローラーとして知られている。
また、ブラシレスモーターのコントローラーは、ブレーキ信号を利用することで、電源スイッチング角度の調整、ブレーキ、逆転、ロック、モーターへの電源供給停止など、ブラシモーターにはできないいくつかの機能を実現することができる。バッテリーカーの電子アラームロックは、これらの機能をフルに活用している。
モータ本体とドライバからなるブラシレスDCモータは、メカトロニクスの標準的な製品である。
ブラシレスDCモータは自己制御モードで動作するため、可変周波数速度制御で高負荷時に始動する同期モータのように、ロータに始動巻線を設ける必要がない。また、負荷が急変したときに発振したり狂ったりすることもありません。
モーターが開発された19世紀には、実用的なモーターはブラシレスだった。これは、交流の発生後に広く使われるようになった交流リスケージ非同期モーターのことである。
しかし、非同期モーターには克服できない多くの欠陥があり、モーター技術の発展を妨げていた。特に、ブラシレスDCモーターは長い間市販されていなかった。実用化されたのは、電子技術の急速な進歩にともなう近年のことである。
とはいえ、ブラシレスDCモーターは依然としてACモーターのカテゴリーに属している。
ブラシレスモーターの発明から間もなく、DCブラシレスモーターが開発された。DCブラシレスモーターは、機構が簡単で、生産と加工が容易で、メンテナンスが便利で、制御が容易であるため、人気がある。
直流モーターはまた、高速応答、大きな始動トルク、ゼロ速度から定格速度まで定格トルクを供給できるといった特性を持っている。そのため、導入されるやいなや広く使われるようになった。
DCブラシモーターには、速い始動応答、大きな始動トルク、安定した速度変化、ゼロ速度から最高速度までの振動の最小化、始動時のより大きな負荷の駆動能力など、いくつかの利点があります。
一方、ブラシレスモーターは始動抵抗(誘導リアクタンス)が大きいため力率が低く、始動トルクが比較的小さいという欠点がある。また、始動時のブザー音や強い振動が発生し、始動時には小さな負荷しか駆動できない。
ブラシモーターは電圧によって調整され、安定した始動、制動、定速運転を保証します。
一方、ブラシレスモーターは通常、デジタル周波数変換によって制御される。このプロセスでは、交流を直流に変換し、再び交流に戻し、周波数の変化を使って速度を制御する。
その結果、ブラシレスモーターは、始動時や制動時に不安定な性能と大きな振動が発生することがある。一定速度で動作して初めて安定する。
DCブラシレスモーターは通常、モーターの出力パワーを高め、制御精度を向上させるために減速機やデコーダーと組み合わされる。
0.01mmに達する制御精度により、モーターはほぼ任意の位置で可動部を停止させることができる。
DCモーターはあらゆる精密工作機械を制御する。
しかし、ブラシレスモーターは始動時や制動時に安定せず、可動部は毎回異なる位置で停止する。
希望の位置を得るには、位置決めピンやストッパーを使用しなければならない。
DCブラシモーターは、構造が簡単で、製造コストが低く、製造メーカーが多く、技術が成熟しているため、広く使用されている。工場、加工工作機械、精密機器、その他の用途で一般的に利用されている。
モーターが故障した場合は、カーボンブラシを交換するだけで十分だ。カーボンブラシは1個数元しかしないので、手頃なソリューションだ。
一方、ブラシレスモーターの技術はまだ未成熟で、価格も高く、応用範囲も限られている。可変周波数エアコンや冷蔵庫などの定速機器に最適である。ブラシレスモーターが破損した場合は、交換するしかない。
ブラシレスモーターはブラシを必要としないため、動作中に電気火花が発生しないという大きな変化をもたらします。これは、電気火花によるリモコン無線機器への干渉を減らすことに直接影響します。
ブラシレスモーターはブラシを使わずに作動するため、摩擦が大幅に減少し、動作がスムーズになり、騒音レベルが大幅に低下します。これらの利点は、モデルの動作安定性に大きく貢献しています。
ブラシレス・モーターはブラシなしで作動するため、摩耗や損傷の主な原因はベアリングにある。機械的な観点からは、ブラシレスモーターはほぼメンテナンスフリーです。必要な場合は、簡単なダスト除去のメンテナンスだけで済みます。
つのモーターの制御は電圧調整によって実現される。ブラシレスDCモーターは電子整流を使用し、デジタル制御で実現できるが、ブラシDCモーターではカーボンブラシを介した整流にサイリスタのような従来のアナログ回路を使用することができ、比較的簡単である。
1.ブラシ付モータの速度調整プロセスでは、モータの電源電圧を調整する。調整された電圧と電流は整流子とブラシを通して変換され、電極から発生する磁界の強さを変え、それによって速度を変えます。このプロセスは可変電圧速度制御として知られています。
2.これに対し、ブラシレスモーターの速度調整プロセスでは、モーター電源の電圧を変化させないまま、電気的調整の制御信号を変化させる。ハイパワーMOSトランジスタのスイッチング速度をマイクロプロセッサによって変化させ、速度を変化させる。このプロセスは可変周波数速度制御と呼ばれる。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。