電動モーターの温度制限:性能の保護
電気モーターがオーバーヒートすることなくスムーズに作動しているのはなぜか、不思議に思ったことはありませんか?モーターの安全な動作温度を理解することは、モーターの寿命と性能にとって非常に重要です。この記事では...
電気モーターはどのようにして電気を運動に変換するのか?私たちの動力の半分近くがこのモーターで動いている世界を想像してみてほしい。この記事では、電気モーターの背後にある科学を掘り下げ、磁場と電流を利用して回転運動や直線運動を生み出す仕組みを説明する。DCモーターやACモーターなど、さまざまなモーターとその内部メカニズムを理解することで、現代技術におけるモーターの重要な役割について理解を深めることができます。このユビキタスデバイスの謎を解き明かす準備はできていますか?電気モーターの原理と応用を探求するために読み進めてください。

世界の電力消費の半分近くは電気モーターによるものであり、電気モーターの効率改善は世界のエネルギー問題に取り組む上で最も効果的な対策と考えられている。
一般にモーターは、磁界中の電流の流れによって発生する力を回転運動に変換するが、広義には直線運動も含まれる。
モーターを駆動する電源の種類によって、DCモーターとACモーターに分類される。
さらに、モータの回転原理によって、特殊なモータを除き、以下のように大別される。
(1) ブラシ付きモーター
広く普及しているブラシ付きモーターは、一般にDCモーターと呼ばれる。ブラシ」と呼ばれる電極(固定子側)と「整流子」と呼ばれる電極(電機子側)を順次接触させて電流を切り替えることで回転します。
(2) ブラシレスDCモーター
ブラシレスDCモーターはブラシや整流子を必要としない。トランジスタなどのスイッチング機能を使って電流を切り替え、回転運動を実現する。
(3) ステッピングモーター
このモーターはパルス電力に同期して動作するため、パルスモーターとも呼ばれる。正確な位置決め動作が容易に行えるのが特徴です。
(1) 非同期モーター
交流電流がステーターに回転磁界を発生させ、その相互作用でローターが電流を誘起して回転する。
(2) 同期モーター
交流電流が回転磁界を作り、磁極を持つローターが吸引力によって回転する。回転速度は電源周波数に同期している。
| ステッピングモーター | ブラシ付き直流モーター | ブラシレス直流モーター |
 |  |  |
まず、この後のモーター原理の説明を容易にするために、電流、磁界、力に関する基本的な法則・ルールを再確認しておこう。
ノスタルジーを呼び起こすかもしれないが、磁性部品を日常的に使用しなければ、この知識は簡単に忘れてしまう。
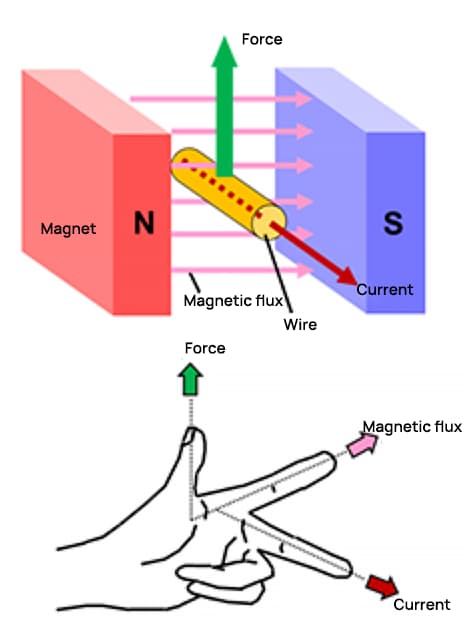
画像と方程式を使って説明しよう。

ワイヤーフレームが長方形の場合、電流に作用する力を考慮しなければならない。フレームのa部とc部に作用する力Fは次の通りである:

トルクは中心軸の周りに発生する。例えば、回転角がθだけの状態を考えると、bとdに直角に働く力はsinθとなる。その結果、a部のトルクTaは次式で表される:

同様にC部を考えると、トルクは2倍になり、以下の式で計算されるトルクが発生する:

長方形の面積がS=h*lであることを考えると、前述の式に代入することで次の結果が導かれる:

この公式は長方形だけでなく、円形など他の一般的な形状にも適用できる。この原理は電気モーターの動作の根底にある。
1) モーターは磁石と磁力を利用して回転する。
永久磁石の周りに回転軸がある:
磁石を回転させる(回転磁界を発生させる)。
反対極(NとS)は引き合い、同極は反発するという原理に従っている。
回転軸のついた磁石が回転する。
これがモーター回転の基本原理である。

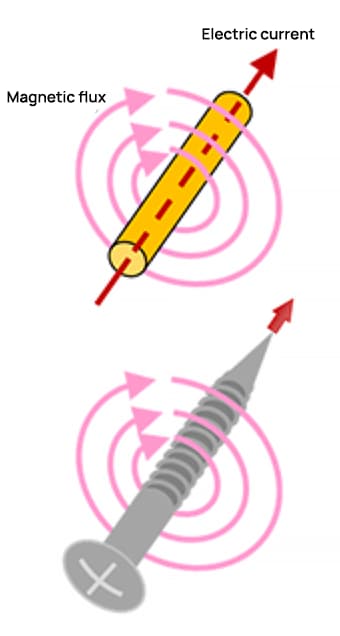
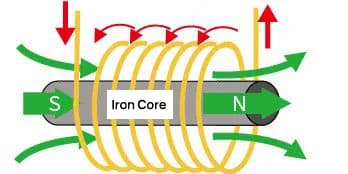
導体を流れる電流は、導体の周囲に回転磁場を発生させ、磁石を回転させる。
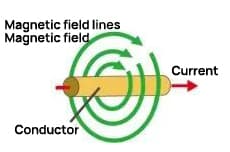
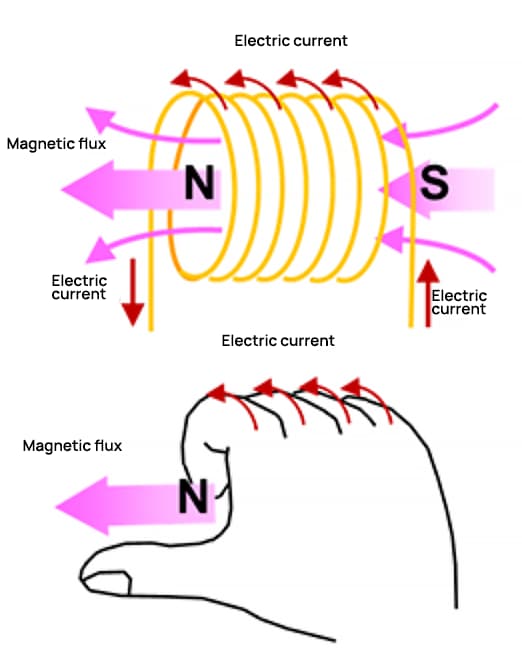
さらに、導体をコイル状に巻くと、磁力が合成されて大きな磁束が形成され、北極と南極ができる。
さらに、コイル状の導体に鉄のコアを入れることで、磁力線が通りやすくなり、より強い磁力を発生させることができる。
2) 運転回転モーター
その中で、回転磁界を発生させるための三相交流とコイルの使い方を示しながら、回転モーターの実用的なアプローチを紹介する。(三相交流とは、120°間隔で位相がずれた交流信号のことである)。
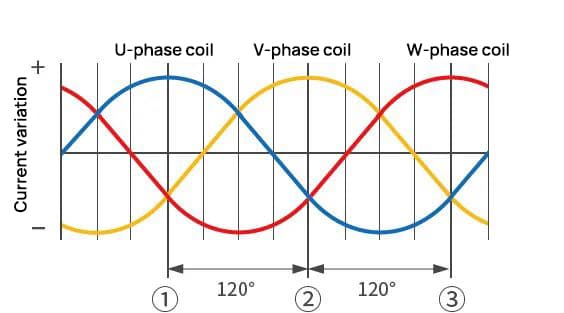
前述の状態①で合成された磁場が下の図①に相当する。
前述の状態②で合成された磁場は、下図②のようになる。
上記状態③に伴う合成磁場を図③に示す。

前述のように、鉄心に巻かれたコイルは3相に分かれている:U相コイル、V相コイル、W相コイルが120度間隔で配置されている。電圧の高いコイルは北極を、電圧の低いコイルは南極を発生させる。
正弦波によって各相が変化するため、各コイルの極性(北極か南極か)と発生する磁界(磁力)が変化する。
このとき、北極を発生させるコイルだけを考えると、U相コイルからV相コイル、W相コイル、そしてU相コイルへと順に変化し、回転が発生する。
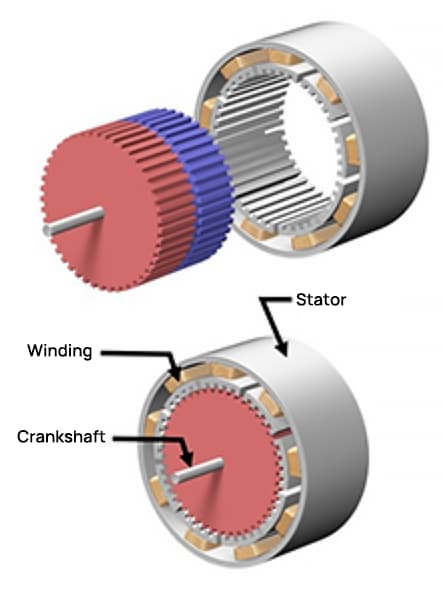
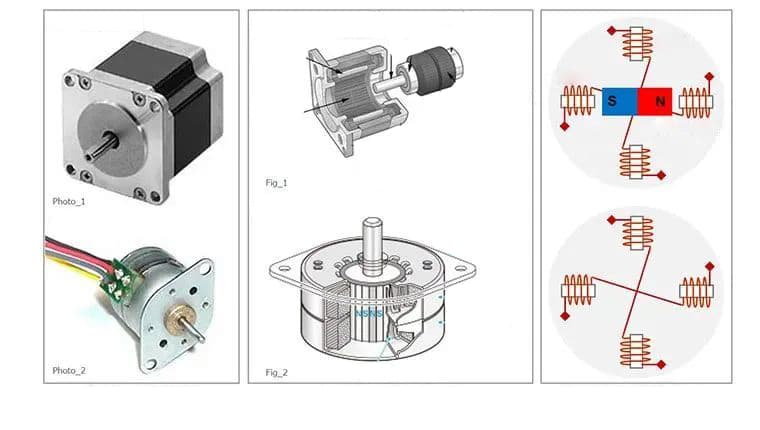
下図は、ステッピングモーター、ブラシ付き直流(DC)モーター、ブラシレス直流(DC)モーターの3種類のモーターの一般的な構造と比較を示している。
これらのモーターの基本構成部品には、主にコイル、マグネット、ローターが含まれる。多様なタイプがあるため、コイル固定型と磁石固定型にさらに分類される。
| ステッピングモーター | ブラシ付き直流モーター | ブラシレス直流モーター |
| | | |
以下は、図の例に関連した構造説明である。細かく分ければ他にも構造があるかもしれないので、大枠での構造を紹介しているものとご理解ください。
ここでのステッピング・モーターのコイルは外側で固定され、内側で磁石が回転している。ブラシ付きDCモーターの磁石は外側で固定され、内側でコイルが回転している。
コイルへの電力供給と電流の方向転換は、ブラシと整流子によって処理される。ブラシレスモーターでは、コイルは外側で固定され、内側で磁石が回転する。
モータの種類は様々であるため、基本的な構成部品が同じであっても、構造が異なることがある。具体的な内容は各項で説明する。
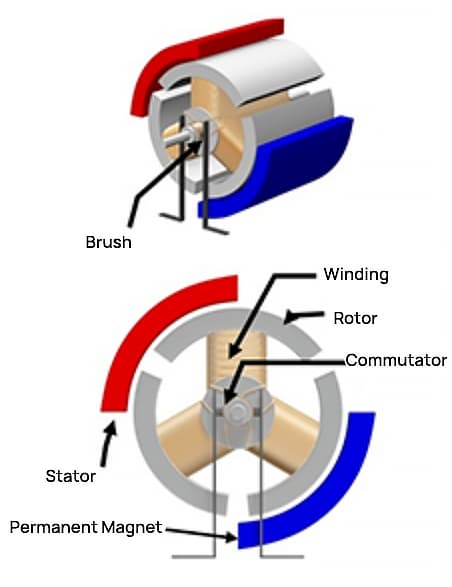
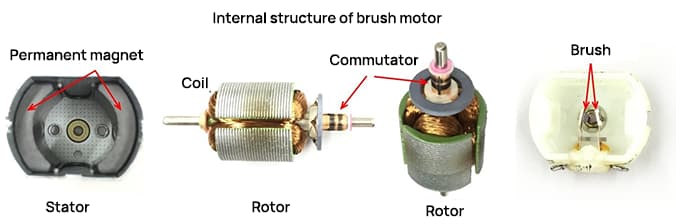
ブラシ付モータの構造
下の画像は、模型によく使われるブラシ付きDCモーターの外観と、一般的な2極(マグネット2個)、3スロット(コイル3個)モーターの分解図である。モーターを分解してマグネットを取り外した経験がある人も多いだろう。
ブラシ付きDCモーターでは、永久磁石は静止しているが、コイルは内部中心の周りを回転することができる。静止側を "ステーター"、回転側を "ローター "と呼ぶ。

以下は、構造的な概念を示す概略図である。
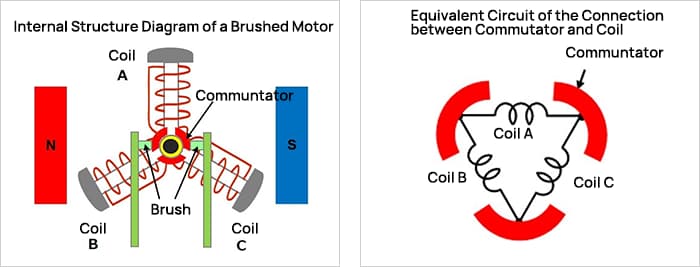
回転の中心軸は、3枚の整流子(電流の切り替えに使用される湾曲した金属板)で囲まれている。互いに接触しないよう、整流子は120°(360°÷3ユニット)離れて配置されている。これらの整流子は軸とともに回転する。
各整流子はコイルの一端ともう一端に接続され、3つの整流子と3つのコイルを合わせて完全な回路網(リング)を形成する。
2本のブラシが0°と180°の位置に固定され、整流子と接触する。外部直流電源がブラシに接続され、ブラシから整流子、整流子からコイル、コイルからブラシに戻る経路で電流が流れる。
これがブラシ付きモーターの回転原理である。
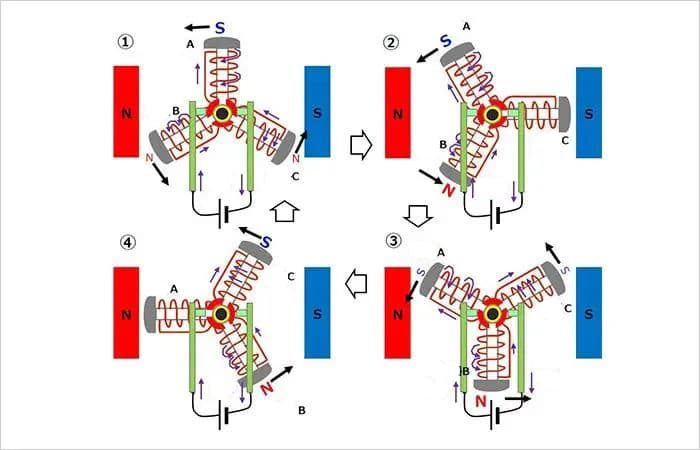
初期状態から反時計回りに回転
コイルAが一番上にあり、電源はブラシに接続され、左側を(+)、右側を(-)とする。左のブラシから整流子を通ってコイルAに大電流が流れ、コイルAの上部(外側)が南極(S)になる。
コイルAの電流の半分が左ブラシからコイルBとCに流れ、コイルAとは逆方向に流れるため、コイルBとCの外側は、図では小さい文字で示される弱い北極(N)となる。
これらのコイルに発生する磁場は、磁石の反発と引力とともに、コイルを逆時計回りに回転させる力となる。
さらに反時計回りに回転
次に、コイルAが反時計回りに30°回転したと仮定すると、右ブラシが2つの整流子に接触する。
コイルAに流れる電流は左ブラシから右ブラシを横切って流れ続け、コイルの外側は南極のままである。コイルBにも同じ電流が流れ、その外側はより強い北極に変わる。コイルCは両端のブラシによって短絡されているため、電流は流れず、磁場も発生しません。
この状態でも反時計回りに回転する力が加わる。から④にかけて、上側のコイルは左回りに、下側のコイルは右回りに駆動され続け、その結果、反時計回りの回転が続く。
コイルが③と④の状態に30度回転するごとに、コイルが中央の水平軸より上にあるときは外側が南極になり、下にあるときは北極になり、この動きを繰り返す。
つまり、上側のコイルには左向きの力、下側のコイルには右向きの力(いずれも反時計回り方向)が繰り返しかかる。これにより、ローターは反時計回りに回転し続ける。
反対側の左ブラシ(-)と右ブラシ(+)に電源を接続すると、コイルに逆磁界が発生するため、コイルにかかる力の向きが反転し、時計回りに回転する。
さらに、電源が切断されると、回転を駆動していた磁界がなくなるため、ブラシ付きモーターのローターは回転しなくなる。
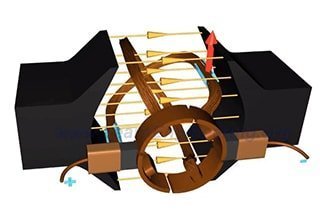
三相全波ブラシレスモータの外観と構造
下の画像はブラシレスモーターの外観と構造の一例です。
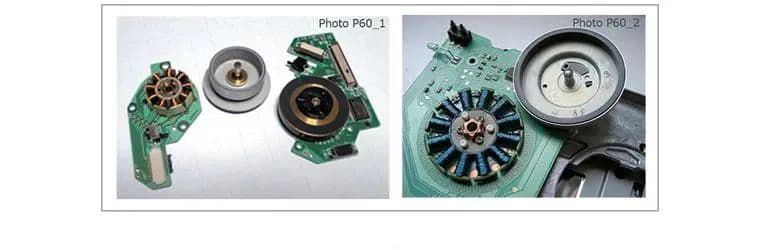
左側は、ディスク再生装置でディスクを回転させるためのメインスピンドルモーターの例で、3相×3の合計9個のコイルを含む。
右はFDD装置の主軸モーターの例で、12個のコイル(3相×4)を持つ。コイルは回路基板に実装され、鉄芯に巻き付けられている。
コイルの右側、円盤状の部品は永久磁石のローター。外周は永久磁石で、ローターの軸がコイルの中心に挿入されてコイルの一部を覆い、永久磁石がコイルの外周を取り囲んでいる。
三相全波ブラシレスモータの内部構造図と等価回路図
次に、三相全波ブラシレスモーターの簡略化した内部構造図とコイル接続の等価回路図である。

この回路図は、2極(2個の磁石)3スロット(3個のコイル)モーターの単純な構造を表している。同数の極とスロットを持つブラシ付きモーターの構造に似ているが、コイル側が固定でマグネットが回転可能である点が異なる。当然、この設計にはブラシは組み込まれていない。
この構成では、コイルはY字型に接続されている。半導体部品がコイルに電流を供給し、回転する磁石の位置に基づいて電流の流入と流出を制御する。
この例では、磁石の位置を検出するためにホール素子が使用されている。ホール素子はコイルの間に配置され、磁界の強さによって発生する電圧を検出して位置情報に利用する。
先に提供したFDDスピンドルモーターの画像では、ホール素子(コイルの上に位置する)も観察でき、コイル間の位置を検出する役割を果たしている。
ホール素子はよく知られた磁気センサーである。磁界の大きさを電圧に変換し、磁界の方向を正負の値で表します。下図はホール効果の説明図です。

ホール素子は、"半導体に電流IHが流れ、磁束Bが電流と直角に通過すると、電流と磁界に垂直な方向に電圧VHが発生する "という現象を利用している。
ホール効果」として知られるこの現象は、アメリカの物理学者エドウィン・ハーバート・ホールによって発見された。発生する電圧VHは以下の式で表される。
VH=(KH/d)・IH・B
ここで、KHはホール係数、dは磁束透過面の厚さである。
式が示すように、電流が大きいほど電圧は高くなる。この特性は、ローター(磁石)の位置を検出するためによく使われる。
三相全波ブラシレスモータの回転原理
ブラシレスモーターの回転原理を①~⑥の手順で説明する。理解を容易にするため、永久磁石を円形から長方形に簡略化している。
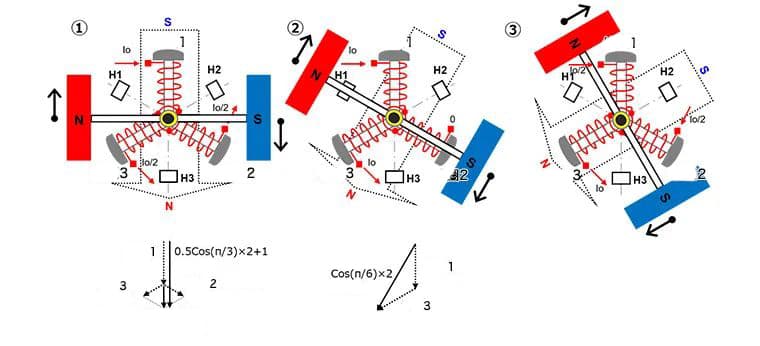
1) 3相コイルシステムにおいて、コイル1が時計の12時の位置に、コイル2が4時の位置に、コイル3が8時の位置に固定されているとする。左が北極、右が南極の回転可能な2極の永久磁石を想定する。
コイル1に電流Ioが流れ、コイルの外側に南極の磁界が発生する。この電流の半分であるIo/2がコイル2と3から流出し、コイルの外側に北極の磁界を発生させる。
コイル2と3の磁場がベクトル合成されると、下向きの北極磁場が発生する。この磁場は、1つのコイルに電流Ioを流したときに発生する磁場の半分の大きさで、コイル1の磁場に加えると1.5倍になる。これにより、永久磁石に対して90°の角度で合成磁界が発生するため、最大トルクが発生し、永久磁石の時計回りの回転が促される。
回転位置に応じてコイル2の電流が減少し、コイル3の電流が増加すると、合成磁場も時計回りに回転し、永久磁石の回転が継続する。
2) 30°回転すると、電流Ioがコイル1に入り、コイル2の電流がゼロになり、電流Ioがコイル3から流出する。
コイル1の外側がS極になり、コイル3の外側がN極になる。ベクトル結合の際、発生する磁場は、電流Ioを流す1つのコイルの√3(約1.72)倍となる。また、この結果、永久磁石の磁場に対して90°の角度をなす複合磁場が時計回りに回転する。
回転位置に応じてコイル1の流入電流Ioが減少し、コイル2の流入電流がゼロから増加し始め、コイル3の流出電流がIoまで増加すると、合成磁界も時計回りに回転し、永久磁石は回転を続ける。
すべての相電流が正弦波であると仮定すると、ここでの電流は Io×sin(π⁄3)=Io×√3⁄2 となる。磁界のベクトル結合により、総磁界の大きさは1つのコイルが発生する磁界の1.5倍となる((√3⁄2)2×2=1.5)。すべての相電流が正弦波の場合、永久磁石の位置に関係なく、ベクトル合成磁場の大きさは常に単一コイルの1.5倍であり、磁場は永久磁石の磁場と90°の角度を形成する。
3) さらに30°回転すると、電流Io/2がコイル1に流れ込み、電流Io/2がコイル2に流れ込み、電流Ioがコイル3から流れ出す。
コイル1の外側がS極、コイル2の外側もS極、コイル3の外側がN極になる。ベクトル合成時の発生磁界は、1つのコイルに電流Ioを流したときの磁界の1.5倍となる(①と同じ)。ここでも永久磁石の磁場に対して90°の角度で、時計回りに回転する複合磁場が形成される。
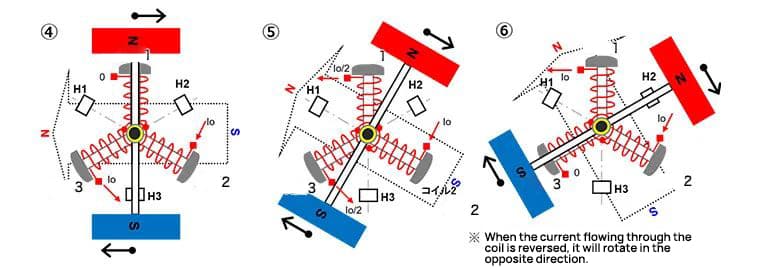
ステップ4から6は、ステップ1から3と同じように回転させる。
このように、永久磁石の位置に応じてコイルに流す電流を順次切り替えることで、永久磁石は一定方向に回転する。同様に、電流を逆にして合成磁界の向きを逆にすれば、反時計回りに回転する。
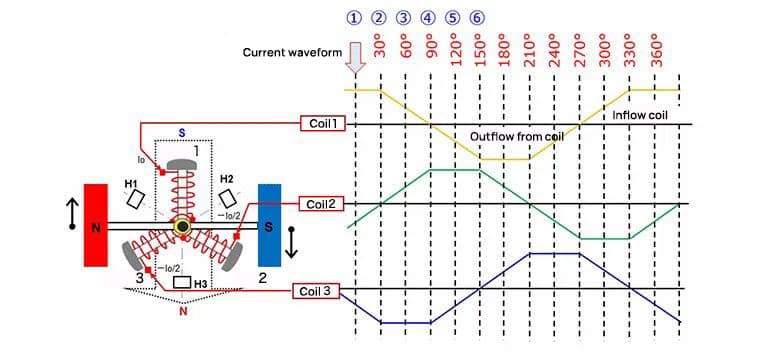
下図は、前述のステップ1からステップ6までの各コイルの電流を連続的に表示したものである。以上の紹介から、電流の変化と回転の関係が理解できるはずである。
ステッピングモーターは モーターの種類 パルス信号に正確に同期して回転角度と速度を制御できる。パルスモーター」とも呼ばれる。
位置センサーを必要とせず、オープンループ制御で正確な位置決めができるステッピングモーターは、正確な位置決めが必要な機器に広く使われている。
ステッピングモータの構造(二相バイポーラ)
下の画像は、左から右へ、ステッピング・モーターの外観の例、内部構造の簡単な図、設計の概念図です。
外観の例は、HB(ハイブリッド)タイプとPM(永久磁石)タイプのステッピングモーターです。中図もHBタイプとPMタイプの構造を表しています。
ステッピングモーターは、固定コイルと回転マグネットで構成されています。右側のステッピングモータの内部構造の概念図は、2相(2組)のコイルを使用したPMモータの例を示しています。ステッピングモーターの基本構造例では、コイルは外部に配置され、永久磁石は内部に配置されている。2相以外にも、3相や5相といった相数の多いタイプもあります。
ステッピングモーターの中には明確な構造を持つものもありますが、その動作原理を説明するために、この記事ではステッピングモーターの基本的な構造を説明します。この記事を通じて、ステッピングモーターが主に固定コイルと回転永久磁石を持つ構造を採用していることを理解することを意図しています。
ステッピングモーター(単相励磁)の基本動作原理
ステッピングモーターの基本的な動作原理を説明するために以下の図を使用します。前述の2相バイポーラコイルを単相(1組のコイル)で励磁した例です。図の前提は①から④への状態変化です。コイルはコイル1とコイル2で構成されている。また、電流の矢印は電流の流れる方向を表す。
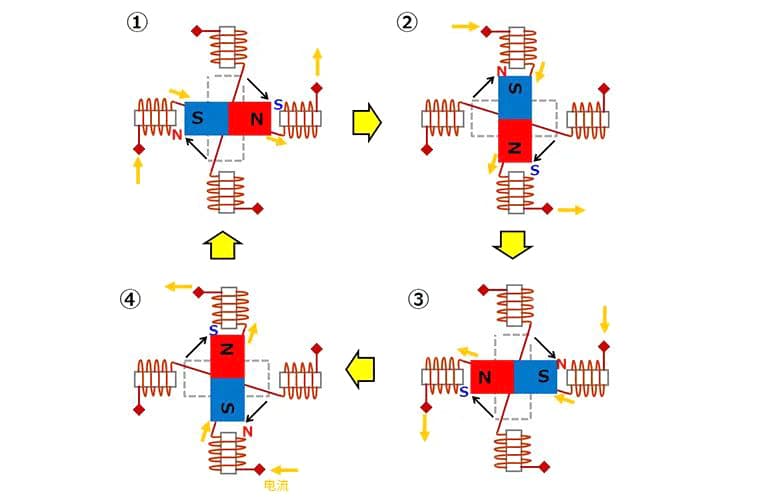
コイル1の左側から電流を流し、右側から電流を流す。コイル2に電流が流れないようにする。その結果、左側のコイル1の内側はN(北)、右側のコイル1の内側はS(南)となります。その結果、真ん中の永久磁石はコイル1の磁界に引き寄せられ、左がS、右がNの状態をとり、停止する。
次に、コイル1の電流を止め、コイル2の上側か ら流入し、下側から流出するようにする。すると、上のコイル2の内側はN、下のコイル2の内側はSとなり、永久磁石はこの磁界に引き寄せられ、時計回りに90度回転して止まる。
その後、コイル 2 の電流を止め、コイル 1 の右側から流入、左側から流出させる。左のコイル1の内側はS、右のコイル1の内側はNとなり、永久磁石は再びこの磁界に引き寄せられ、時計回りにさらに90度回転して停止する。
最後にコイル1の電流を止め、コイル2の下側から流入し、上側から流出するようにする。上のコイル2の内側はSになり、下のコイル2の内側はNになる。もう一度、永久磁石はこの磁界に引き寄せられ、時計回りに90度回転して止まる。
コイルに流れる電流を電子回路で上記①~④の順に切り替えることで、ステッピングモーターを回転させることができます。この例では、1回のスイッチ操作でステッピングモーターを90度回転させる。
さらに、特定のコイルを流れる電流を連続的に維持することで、トルクを維持したままモーターを停止状態に保つことができます。余談ですが、コイルに流れる電流の順序を逆にすると、ステッピング・モーターが逆方向に回転することがあります。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。