鋳物製造:工程の流れ、設備、原理と特徴
この記事では、鋳物製造の魅力的な世界に飛び込み、原材料を必要不可欠な部品に変えるステップ・バイ・ステップのプロセスを明らかにします。鋳造に関わる技術、材料、品質チェックについて学びましょう。
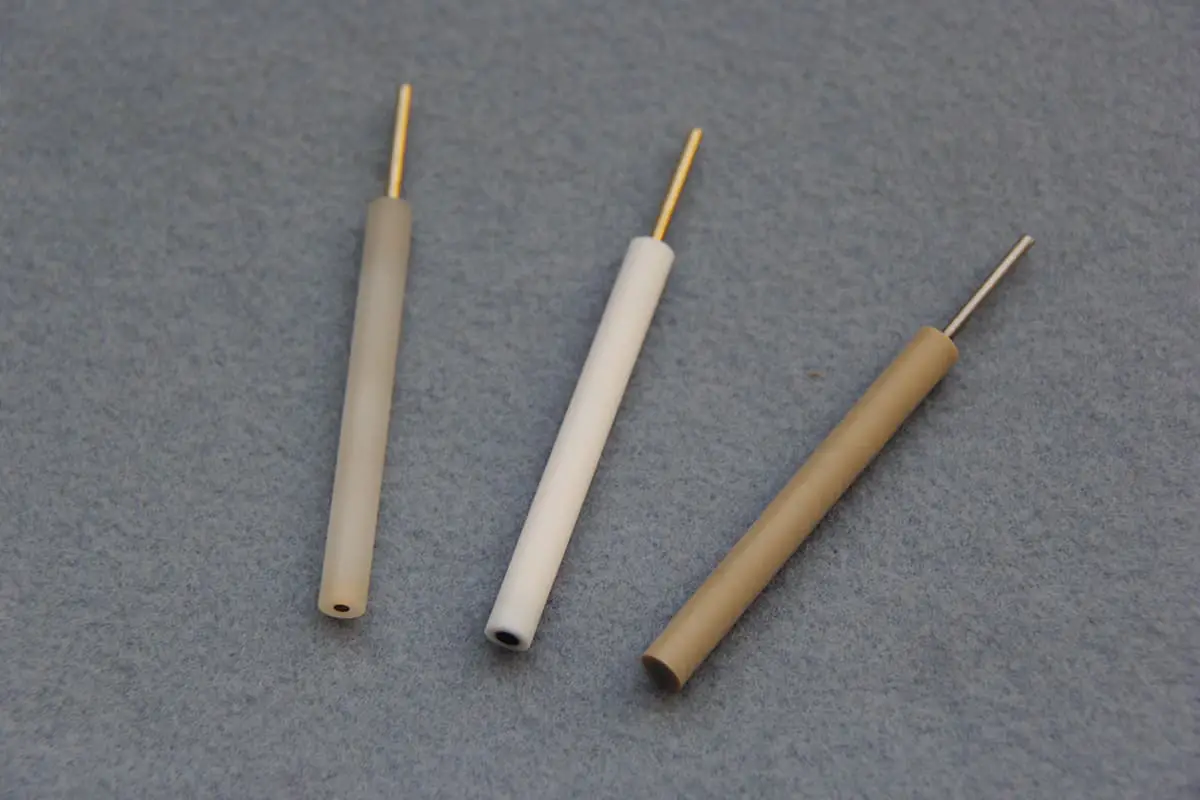
1.電動プッシュロッドと電動シリンダの区別 電動プッシュロッドと電動シリンダは、一般に電動アクチュエータと呼ばれている。電動モータを使用して各種ねじを回転駆動し、ねじナットの回転運動を往復直線運動に変換します。一般的に、電動シリンダーと電動プッシュロッドの動作原理は同じで、直線的な押し、引き、持ち上げ動作を行います。しかし、厳密に言えば、両者にはまだ多くの微妙な違いがあります(両者を特に区別することなく、電動リニアアクチュエータと呼びます)。簡単に言うとプッシュロッド:推力が小さく、単純な押し・[...]動作ができる。

電動プッシュロッドや電動シリンダは、一般に電動アクチュエータと呼ばれている。電動モータで各種ねじを回転駆動し、ねじナットの回転運動を往復直線運動に変換する。
一般に、電動シリンダーと電動プッシュロッドの動作原理は同じで、直線的な押し、引き、持ち上げ動作を行う。
しかし、厳密に言えば、両者にはまだ多くの微妙な違いがある(両者を特に区別することなく、電動リニアアクチュエータと呼ぶ)。

プッシュロッド:
推力が弱く、単純な押し引き(位置決め機能なし)であり、高速運転はしないこと。DCモーターを使用する。小推力プッシュロッドの伝動部はプラスチック歯車で、大推力プッシュロッドの伝動部はウォーム歯車である。
サーボ電動シリンダー:
正確な位置決めが可能で、直流または交流電源を使用でき、推力範囲が広く、伝動部品は一般に伝動ベルトとカップリングを介して直接接続され、耐用年数が長い。
サーボ電動シリンダーには複数の制御モード(速度モード、位置モード、トルクモード)があり、要求に応じて選択できる。
1.構造
電動プッシュロッドの内部ナットは普通のナットで、内部構造のクリアランスが比較的大きい。使用するモーターはACまたはDCモーターが多く、繰り返し位置決め精度が低く、寿命が短い。
電動シリンダの構造はスクリュー構造である。電動シリンダに使用される電動モータは、サーボモータやステッピングモータが主流で、内部クリアランスがほぼゼロであるため、シリンダの繰り返し位置決め精度が高く、応用範囲が広い。
耐用年数は長い(総ストロークは100,000KM以上に達することができる)。
2.精度
AC電動プッシュロッド精度:0.2mm、DC電動プッシュロッド精度:1-2mm。電気シリンダーの正確さ: 0.01-0.02mm。
3. 素材の選択
電動プッシュロッドは普通の台形ねじやボールねじでできており、通常はギアモーターやタービンロッドなどの伝達手段に接続されている。効率は比較的低い。
サーボ電動シリンダーは通常、研削ボールねじまたは遊星ボールねじを使用し、モーターと直接結合するか、プーリーと同期接続されている。速度と効率が非常に高い。
4.スピード
電動プッシュロッドの速度は一般的に100mm/s以下である。
電動シリンダーの速度は2m/sに達する。
5.コントロール
電動プッシュロッドは、始点と終点の2つの位置しか制御できない。電動シリンダーは任意の位置で始動・停止が可能です。
6.スラスト
電動プッシュロッドは主に押し引き動作に使用され、推力は基本的に10トンを超えることは難しい。サーボ電動シリンダーのような電動シリンダーの場合、推力は35トン以上に達します。
要約すると、電気プッシュロッドは、単純な構造、低推力、低動作周波数、簡単な制御手順、および低価格を持っています。これは、様々な単純または複雑な製造プロセスにおける実行機械部品として使用されます。
電動シリンダー、特にサーボ電動シリンダーは、プッシュロッドに比べて推力が大きく、ストロークが長く、精密な速度・位置制御が可能で、速度が速く、価格が高いという特徴がある。より広く使用されている。
つまり、電動シリンダー(通常はサーボ電動シリンダー)は、正確な位置決め、高速、高負荷、長寿命が可能であり、産業機器、航空宇宙分野で多く使用されており、電動プッシュロッドとは異なるカテゴリーに属する。
電動プッシュロッドは単純な伸縮しかできず、正確な位置決めができず、大きな押し力に耐えられない。小型のプッシュロッドにはプラスチック製のギアが使用され、一般的に要求の低い装置や機器に使用される。
要求の高い産業機器に使用する場合は、電動シリンダーを選択する方が適している。より低い要求の消費財か装置のために、電気押し棒はまた使用することができる。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。