
リニアグレーティングスケールの基礎知識:知っておくべきこと
シンプルなガラス面で工作機械の精度を解き放つことを想像してみてください。リニアグレーティングスケールはまさにそれを実現し、細い線を高精度の測定に変換する。この記事では、これらの...
機械がどうやって自分の位置や速度を正確に把握しているのか、不思議に思ったことはありませんか?この記事では、機械的な動きを検出するために重要なセンサーであるエンコーダーの魅力的な世界を探ります。エンコーダの種類、動作原理、現代の機械におけるアプリケーションについて学びます。モーター制御の精度を支える秘密などを解明する準備をしましょう!

エンコーダは、主に機械的な動きの速度、位置、角度、距離、またはカウントを検出するために使用されるセンサの一種です。
機械に使用されるだけでなく、サーボモーターのような多くのモーター制御には、整流、速度、位置検出のフィードバックをモーターコントローラーに提供するためにエンコーダーが必要です。

エンコーダはアナログエンコーダとデジタルエンコーダに分けられる。アナログエンコーダはさらにロータリートランスフォーマーとSin/Cosエンコーダに分けられ、デジタルエンコーダはインクリメンタルエンコーダとアブソリュートエンコーダに分けられます。
1)メカニカルシャフトに取り付けられた分割ディスクを光電カプラでスキャンする。
メカニカルコードは比例電気パルス信号に変換される。
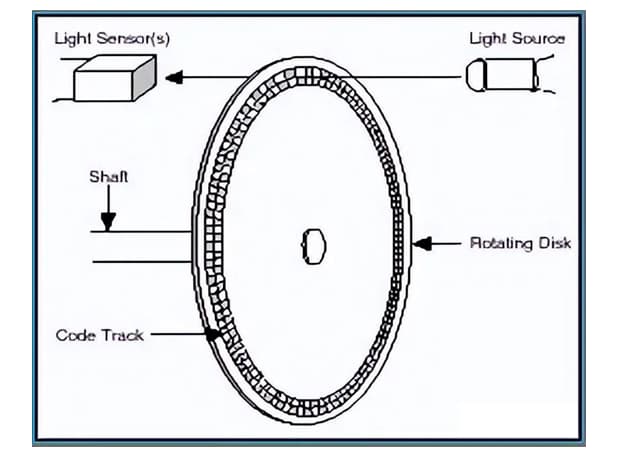
光源(一般にLED)は、受光器(フォトダイオードの場合もある)に向かって細い光線を照射する。光源も受光器も、厳密には回転する連結ベアリングの固定部分に設置される。
エンコーダは、透明な開口部または窓を持つ遮光ディスクで、ベアリングの回転部分に取り付けられている。
ベアリングが回転すると、エンコーダーは光ビームを交互に通過させる(ディスク上の小窓を通過させる)。
フォトダイオードは、位置の変化に応じて対応するハイレベルまたはローレベルの信号を出力する。フォトダイオードの出力は、専用の回路を通して位置と速度の情報に変換することができます。
3.2.1 インクリメンタルエンコーダの出力
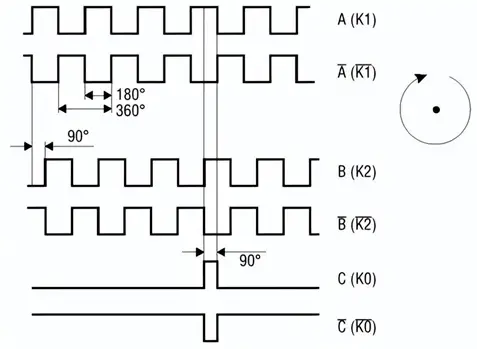
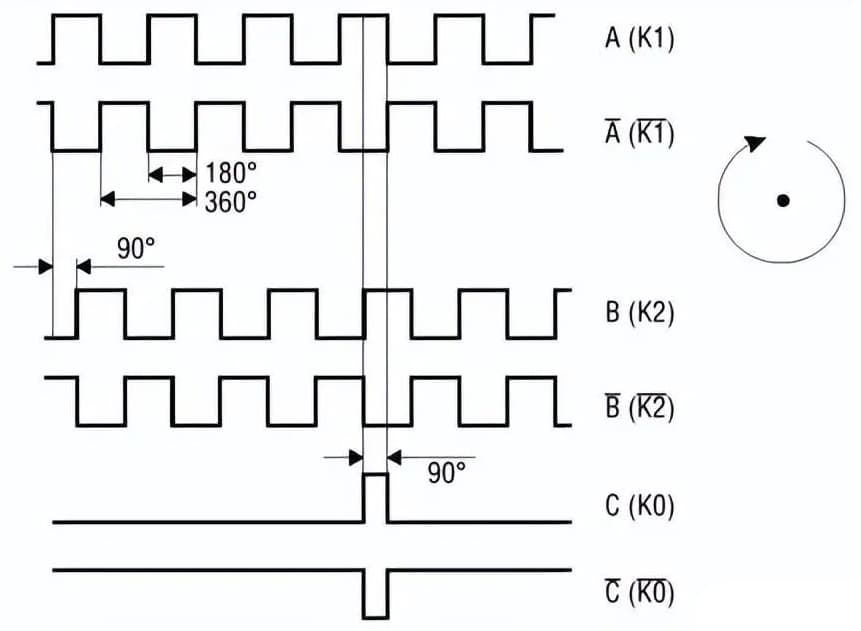
インクリメンタルエンコーダの出力は、円形の透明および不透明なマーキングを持つセンターシャフトの光電ディスクで構成され、光電エミッタおよびレシーバコンポーネントによって読み取られ、A、B、-A、-Bとして組み合わされた方形波信号が得られます。
各信号のペアには90度の位相差Cがある(1サイクルは360度に相当)。
さらに、ゼロ点校正信号があり、エンコーダーはディスクが1回転するごとに1つの信号を出力する。
3.2.2 インクリメンタルエンコーダの接続原理
1.単相接続
一方向計数および一方向速度測定に使用。
2.A-B二相接続
双方向のカウント、方向と速度の決定に使用。
3.A-B-C三相接続
基準位置補正を伴う速度決定に使用。
A-A-B-B-C-C接続は、信号接続電流が左右対称の負極性であるため、減衰が少なく干渉防止に強く、長距離出力が可能。
方向性の決定方法
AとBは90度位相がずれているため、AとBのどちらが先に発生するかを検出することで方向を決定することができる。

ゼロ位置校正の実行方法
エンコーダパルスの伝送中に、干渉などの理由でエラーが発生し、伝送エラーが発生することがあります。
この時、適時ゼロ位置校正を行う必要がある。
Cエンコーダは、ゼロパルスまたは同定パルスと呼ばれる1回転ごとに1パルスを出力し、ゼロ位置または同定位置を決定するために使用される。
回転方向に関係なくゼロパルスを正確に測定するため、ゼロパルスは2チャンネルのハイレベルな組み合わせとして出力される。
チャンネル間の位相差により、ゼロパルスはパルスの半分の長さしかない。
3.2.3 インクリメンタルエンコーダの乗算器
技術的、サンプリング的な限界により、エンコーディングディスクをより細かく、より正確に物理的に分割することは不可能である。
しかし、デジタル回路の変換により、より高いパルスを得ることができる。
ダブル周波数信号
A相とB相の "排他的または "変換によって得られる。
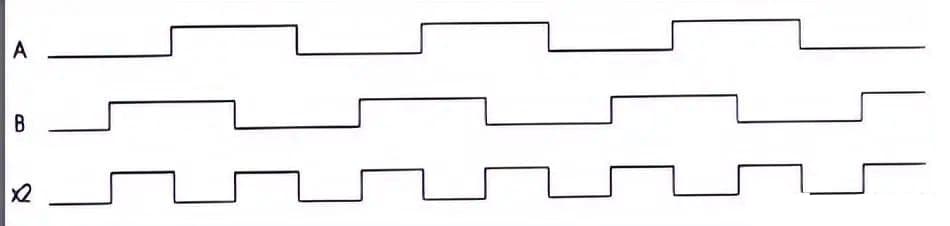
4周波信号
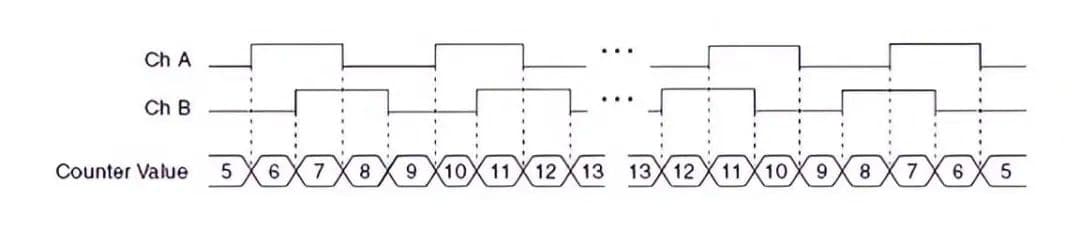
カウンターの方向は、どちらのチャンネルが他方をリードするかによって決まる。
カウンターの数字は、1サイクルごとに4ずつ増減する。
3.2.4 インクリメンタルエンコーダの特徴
エンコーダはあらかじめ設定された回転角度ごとにパルス信号を出力し、その数をカウントすることで回転角度を算出する。
したがって、エンコーダが出力する位置データは相対的なものとなる。
固定パルス信号を使用するため、回転角度の開始位置を任意に設定できる。
相対エンコーディングを使用しているため、回転角度のデータは失われ、停電後にリセットする必要がある。
3.2.5 インクリメンタルエンコーダの問題点
1) インクリメンタルエンコーダはゼロ点累積誤差を持つ。
2) 干渉防止能力が低い。
3) 停電やシャットダウン後は、受信装置の電源を切り、基準位置を再度見つける必要がある。
アブソリュート・エンコーダの登場は、こうした問題を解決する。
アブソリュートエンコーダは、複数の光チャンネルとラインが刻まれた光コードディスクを持っています。
各チャンネルは、2本、4本、8本、16本......と順番にラインを使って符号化される。
エンコーダの各位置で、光チャンネルが読み取られ、そのオン/オフ状態が、2^0から2^(n-1)(nはアブソリュートエンコーダのビット数)の範囲で、グレイコードとして知られる固有のバイナリコードを得るために使用される。
エンコーダーの位置はライトコードディスクによって機械的に決定されるため、停電や干渉の影響を受けない。
3.3.1 アブソリュート・エンコーダ・コードディスク
光コードディスクは光電カプラ群によってスキャンされ、各ポジションに固有のコードを得る。各ポジションには固有のコードがあります。
アブソリュートエンコーダの出力コードは以下の通りです:
1.自然なバイナリコード:0000 0001 0010 0011 0100
2.グレーコード0000 0001 0011 0010 0110
グレーコードの特徴:
数値表現上、隣接する整数は1つしか違わないため、デジタル変換回路で大きなピーク電流が発生するのを避けることができる(3-4、0011-0100など)。
バイナリ-グレーコード変換フォーマット:
上位の桁は保持され、上位の桁と(2進数で)2番目に大きい桁に対して「排他的論理和」演算を行うことで2番目に大きい桁が得られる。
10進コードとグレーコードのリファレンス。

| 10進数 | グレーコード |
| 0 | 0000 |
| 1 | 0001 |
| 2 | 0011 |
| 3 | 0010 |
| 4 | 0110 |
| 5 | 0111 |
| 6 | 0101 |
| 7 | 0100 |
| 10進数 | グレーコード |
| 8 | 1100 |
| 9 | 1101 |
| 10 | 1111 |
| 11 | 1110 |
| 12 | 1010 |
| 13 | 1011 |
| 14 | 1001 |
| 15 | 1000 |
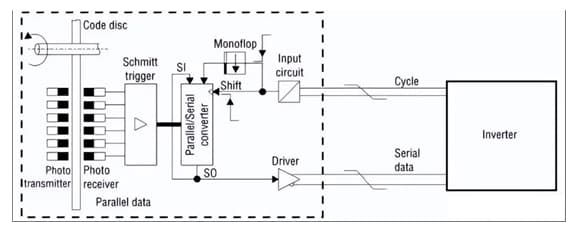
3.3.2 アブソリュートエンコーダの出力形式
1.パラレル出力モード
このモードでは、各ビットのデータ(ビット・チャンネル)に対して1本のケーブルがあり、各ケーブルの信号レベル(ハイまたはロー)は1または0を表す。
物理的なデバイスはインクリメンタルエンコーダーに似ており、物理的なデバイスの形式に基づいて、コレクターオープンPNP、NPN、差動ドライブ、プッシュプル、差動ハイまたはロー有効などのさまざまなタイプがあります。
パラレル出力は一般にグレイコードの形をしており、グレイコードエンコーダーとも呼ばれる。
2.同期シリアル・インターフェース(SSI)出力
このモードでは、データは集中され、複数のケーブルで伝送される。データ出力は、タイミングを指定する通信プロトコルによって命令される。
シリアル出力は少ない接続線で長距離伝送が可能なため、エンコーダの保護と信頼性が大幅に向上します。
高ビットアブソリュートエンコーダとマルチターンアブソリュートエンコーダは、通常シリアル出力を使用します。
3.非同期シリアル・フォーマット
このモードでは、質問と回答を通じて命令とデータが交換され、インターフェイスは二重です。典型的な例はRS485インターフェースで、2本のケーブルが必要なだけです。
データの内容は、エンコーダの位置値、または命令によって要求された他の内容である。
例えば、エンコーダ毎にアドレスを追加すれば、複数のエンコーダで伝送ケーブルとその後の受信を共有することができます。このような形態をフィールドバス型と呼びます。
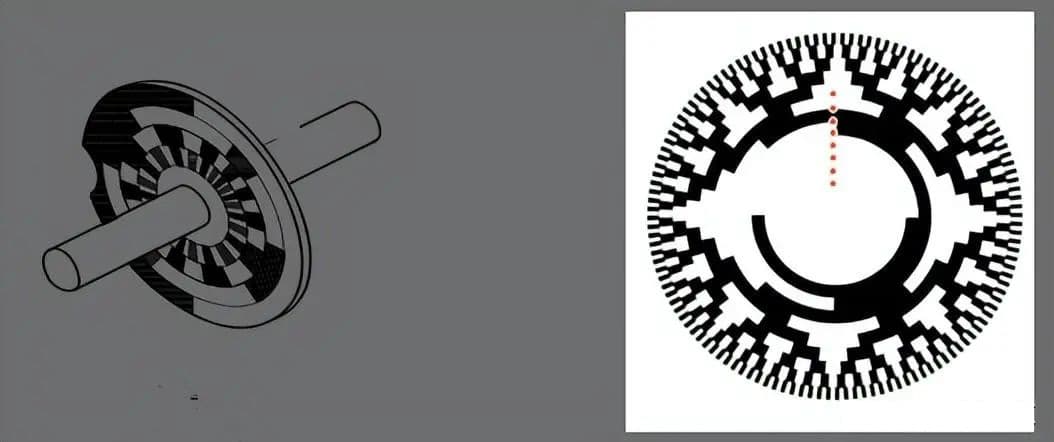
インクリメンタルエンコーディングとアブソリュートエンコーディングは、同じディスク上に統合されている。
ディスクの一番外側の円は高密度のインクリメンタルストライプを含み、中央部分はアブソリュートエンコーダーのバイナリグレイコードチャンネルである。
ディスクの回転は1回転あたりのパルス数をカウントすることで示され、1週間以内に回転した角度はグレーコードの数値でカウントされる。
マルチターンアブソリュートエンコーダ: シングルターンアブソリュートエンコーダをベースに、時計歯車機構の原理を利用し、中央のディスクの回転を歯車伝動によって別のディスクのセット(または複数の歯車とディスクのセット)に伝達することで、シングルターンコーディングをベースにターン数のコーディングを追加し、エンコーダの測定範囲を拡大しています。
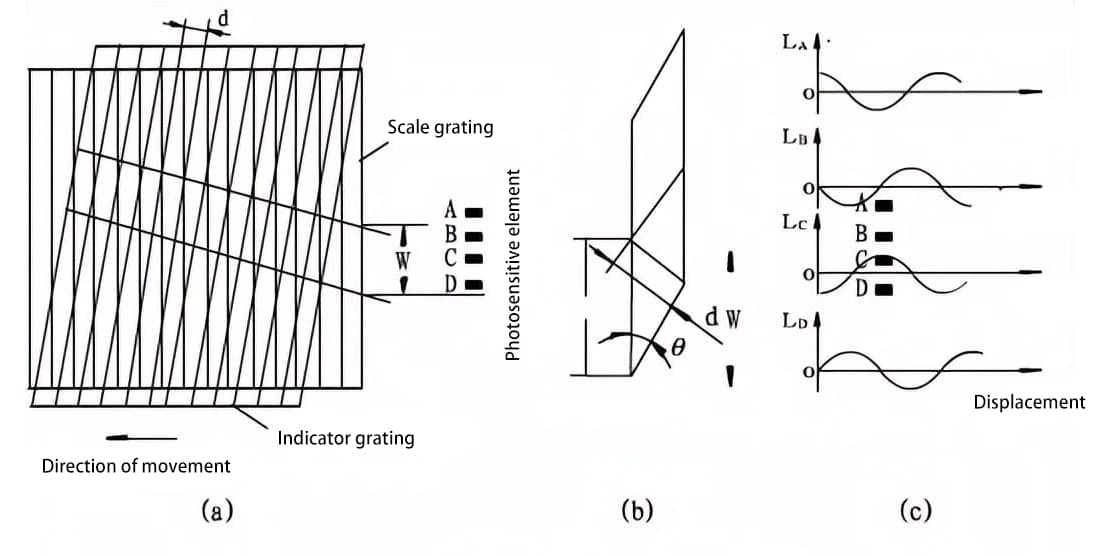
平行光が回折格子を通過すると、モアレ縞の強度はコサイン関数に近似する。
4つの1/4モアレ縞の受光素子をモアレ縞の移動方向に配置することにより、4組の正弦波と余弦波の出力信号を得ることができる。
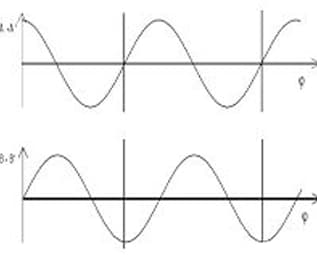
サイン・コサイン・エンコーダの出力形式
リニアエンコーダ
リニアエンコーダは、物体の直線移動距離を測定し、測定距離をパルス電気信号出力に変換する。
簡単に言えば、ロータリーエンコーダのディスクを直線に引き伸ばすという原理である。
格子スケール・エンコーダ
回折格子変位センサーの動作原理は、回折格子対のマスター回折格子(すなわちスケール回折格子)と補助回折格子(すなわちインジケータ回折格子)が相対的に変位すると、光の干渉と回折により、モアレ縞と呼ばれる規則的な白黒(または明暗)の縞模様が生じるというものである。
同じ白黒(または明暗)の縞模様は、光電素子を通して正弦波に変化する電気信号に変換される。
増幅と整形回路による整形の後、位相差90度の2つの正弦波または矩形波信号が得られ、カウントと表示のために回折格子デジタル表示器に送られる。
ロータリートランス
ロータリートランスはレゾルバとも呼ばれ、制御用に使用されるマイクロモータの一種である。
これは、機械的な回転を電気信号に変換する間接的な測定装置で、ある数学的関数によって回転角度に関連付けられる。
ロータリートランスの原理
1.ロータリー・トランスは、ローターの角度によって変化する電圧を出力する信号部品である。
励磁巻線がある周波数の交流電圧で励磁されると、出力巻線の電圧振幅はロータ角度と正弦関数または余弦関数の関係になるか、一定の比例関係を維持するか、ロータ角度と一定の範囲内で直線関係になる。
2.回転トランスのステーターとローター間の磁束分布は正弦法則に従う。
従って、固定子巻線に励磁電圧が印加されると、回転子巻線には上図のような電磁結合による誘導起電力が発生する。
出力電圧の大きさはローターの角度位置に依存するため、ローターの変位に応じて正弦波状に変化する。
トランスの原理では、1次巻線の巻数をN1、2次巻線の巻数をN2とすると、k=N1/N2が巻数比となる。一次巻線に交流電圧を印加すると
ロータリートランスの用途
1.位相検出モード
誘導電圧の位相角は、ローターの機械的な回転角と等しい。
したがって、ローターの出力電圧の位相角さえ検出できれば、ローターの回転角はわかる。
2.振幅検出モード
実際の応用では、変調電圧の電気角度を連続的に変化させることで、機械角の変化を追跡し、誘導電圧の振幅を測定して機械角の変位を得ることができる。
機械的側面:
1.取り付けの際は、許容軸荷重に注意してください;
2.エンコーダ軸とユーザー軸の軸差が、0.5mm以上であることを確認してください。 出力軸 は0.20mm以下で、軸からの偏角は1.5°以下である;
3.取り付けの際は、シャフトやディスクの損傷を防ぐため、ぶつけたり、落としたり、衝突したりしないようにしてください;
4.長期間使用する場合は、エンコーダを固定しているネジが緩んでいないか定期的に点検してください(四半期に1回)。
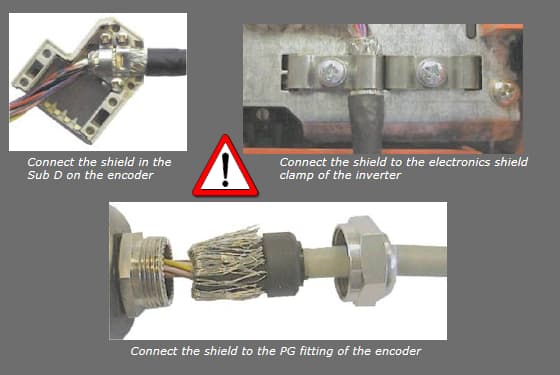
電気的側面:
1)アース線はできるだけ太く、通常1.5平方ミリメートル以上とする;
2)出力回路の損傷を避けるため、エンコーダの出力線は互いに重ならないようにしてください;
3)出力回路の破損を避けるため、エンコーダの信号線は直流電源や交流電流に接続しないでください;
4)エンコーダに接続されるモーターなどの機器は、静電気が発生しないように十分に接地してください。
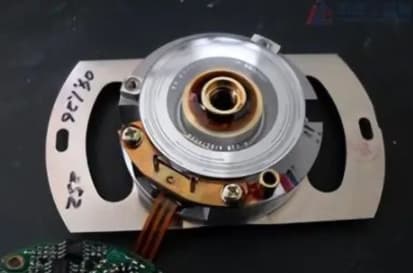
ロータリーエンコーダの内部構造図。


MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。







