リニアモーター:原理、特性、アプリケーション
電車が線路の上に浮いたり、ロボットが正確な動きを実現したりする仕組みを不思議に思ったことはないだろうか。この記事では、リニアモーターの原理、種類、ユニークな利点について説明し、魅力的なリニアモーターの世界を紹介します。
電気自動車の動力源は?AC非同期モーターから永久磁石同期モーター、さらにはスイッチドリラクタンスモーターまで、それぞれのタイプには独自の利点と欠点があります。この記事では、これらの主要なモータータイプの構造、原理、およびアプリケーションについて説明し、電気自動車の性能と効率にどのような影響を与えるかを理解できるようにします。どのモーターがあなたの次の乗り物の原動力になるかもしれません!

新エネルギー車用駆動モータの基本的な性能要件に基づき、一般的に使用されている駆動モータの種類は大きく3つに分類される:AC非同期モーター、永久磁石同期モーター、スイッチドリラクタンスモーターである。
現在、各自動車メーカーが搭載する車種は、それぞれ異なるタイプの駆動モーターを使用している。
したがって、新エネルギー車用のモーターの種類を選ぶには、駆動モーターの構造、作動原理、長所と短所を理解することが重要である。
AC非同期モーターは誘導モーターとも呼ばれ、主にステーター、ローター、モーターシャフト、フロントとリアのベアリング、エンドカバー、位置センサー、温度センサー、低電圧ワイヤーハーネス、高圧電源ワイヤーハーネスで構成されています。
ステーターはステーター鉄心と三相巻線から構成され、ローターは多くの場合、ローター鉄心とリスケージ巻線を含むリスケージ型ローターを使用する。
モーターの出力に応じて、水冷方式か空冷方式かを選択する。図1

1- フロントエンドカバー
2- フロントベアリング
3- モーター・ハウジング
4- リス・ケージ・ローター
5- モーターシャフト
6- ステーター
7- リア・ベアリング
8- リアエンドカバー
9- ポジションセンサー
10- センサーメンテナンスカバー
(1) AC非同期モータ駆動の動作原理
1) 固定子は回転磁界を提供する。トルクを供給するために、AC非同期モーターはステーターコイルに三相交流電力を流し、連続的に回転する磁界(磁界回転速度はns)を作る必要がある。
交流非同期モーターでは、固定子の三相巻線は対称でなければならず、固定子鉄心は電気的に120度離れていなければならない。三相対称巻線を通過する電流も対称でなければならず、同じ大きさ、周波数、120度の位相差でなければならない。回転磁界の回転速度は式(1)で与えられる。
ns=60f/p (1)
この式において、nsは回転磁界の回転速度(同期速度ともいう)r/min、fは三相交流電力の周波数Hz、pは極対の数である。
設計・生産された駆動モーターは、磁極対の数が固定されているため、磁界の回転速度を決定する要因は三相交流電力の周波数である。わが国の送電網の周波数はf=50Hzなので、モータの回転速度と極対数の間には直線関係がある。図2

2) リスかご型ローターは渦電流を誘導する。ステータが回転磁界を供給すると、図3に示すように、リスケージ型ロータの導体に渦電流が誘導される。
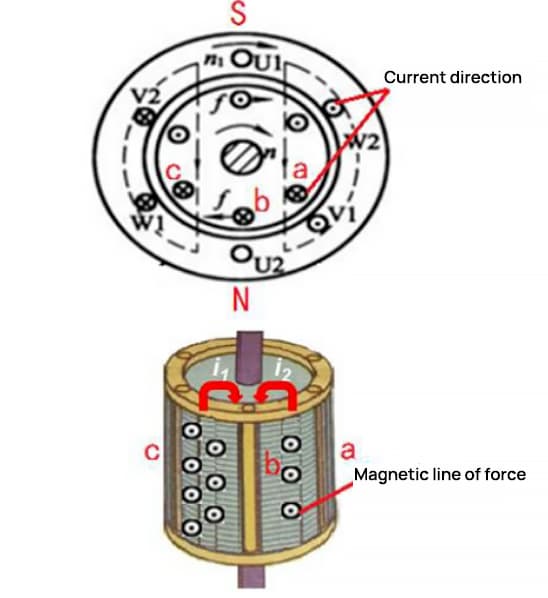
リスケージ巻線の導体cとbの間の磁気領域には、外向きの磁力線があり、この磁力線は回転磁界の作用で増強される。
同様に、導体aと導体bの間の磁力線を弱めると、導体にi2の渦電流が発生する。
導体bに流れる電流は、固定子の回転磁界の作用により、リスケージ巻きの導体bに電磁力を与え、それによってロータが電磁トルクを発生して回転を始める。回転するローターは徐々に回転磁界に追いつき、磁界の「同期速度ns」よりわずかに遅い速度nで回転する。
ローターの回転速度nがステーターの磁界速度nsよりわずかに遅いこの現象は、ローター・スリップと呼ばれる。この非同期スリップによって、リスケージ型ローターの導体が磁力線を連続的に切断し、誘導渦電流が発生する。
その結果、ローターで電気エネルギーが機械エネルギーに変換され、継続的な外部出力が確保される。
(2) 交流非同期モーターの発電原理
ファラデーの電磁誘導の法則によれば、閉回路導体の一部が運動して磁力線を切ると、導体内に誘導電流が発生し、発生した起電力は誘導起電力と呼ばれる。
AC非同期モーターでは、モーターを発電機として使用する場合、固定子に三相電流を通電して磁界を供給し、回転子巻線が導体を供給する。
自動車のドライブシャフトなど、外部の機械的な力がローターシャフトを駆動してローターを動かす場合、ローターの回転速度がステーターの回転磁界の同期速度よりも高ければ、AC非同期モーターは発電機として機能する。
ローターが回転磁界を切る方向は、駆動モーターとして働くときとは逆になるため、ローターの誘導起電力の方向も逆になる。
発電過程では、モーターのローターには外部からの抗力とは逆の電磁トルクが発生し、ローターの回転数が低下する。
AC非同期モーターは、広い範囲で出力トルクを調整することに優れており、加速時や登坂時に短時間で出力トルクを強制的に増加させることができる。永久磁石同期モーターで駆動される電気自動車は、速度向上のためにトルクを増強するギアボックス機構を追加採用することが多い。
しかし、AC非同期モーターにはいくつかの欠点がある。片側励磁のため、より大きな始動電流と、発生する単位トルクあたりにより多くの電流を必要とする。固定子には無効励磁電流が流れるため、永久磁石同期モータよりもエネルギー消費量が高くなり、力率も低下する。
過負荷状態は、高負荷ドライブ中に頻繁に発生する。その比較的複雑な構造は、高い制御技術の専門知識を要求するため、製造コストが高くなり、出力密度も比較的低くなる。
現在、交流非同期モーターは、米国で開発された電気自動車の駆動モーターとして一般的に使用されている。
永久磁石同期モータの構造は、ステータ、ロータ、モータシャフト、前後軸受、エンドキャップ、冷却水路、位置センサ、温度センサ、低電圧ハーネス、電源ハーネスで構成される。
固定子は固定子鉄心と三相巻線で形成され、回転子は永久磁石磁極と鉄心で構成され、鉄心は積層鉄心でできている。 ケイ素鋼板.
ローター内の永久磁石の配置には、主に表面実装型、表面埋め込み型、内部永久磁石ローターがあり、内部永久磁石ローターは新エネルギーモーターで一般的に使用されている。図4
1- フロントエンドカバー
2- フロントエンドベアリング
3- モーター・ハウジング
4- ステーター
5- モーターシャフト
6- 一体型永久磁石ローター
7- リアエンドベアリング
8- リアエンドカバー(ポジションセンサー内蔵)
(1) 永久磁石同期モータの駆動原理
回転磁界はステーターから供給され、AC非同期モーターと同じ方法、同じ速度で発生する。磁極はローターの永久磁石から供給される。
従って、固定子から発生する回転磁界は、回転子の永久磁石の磁極と鉄心と回路を形成する。最小磁気リラクタンス、すなわち磁束は常に磁気抵抗の最も小さい経路に沿って閉じるという原理に従い、ローターは回転磁界の電磁力によって回転に引き込まれる。
その結果、永久磁石ローターはステーターから発生する回転磁界に同期して回転し、モーターシャフトの回転を駆動する。
(2) 永久磁石同期電動機の発電原理
ファラデーの電磁誘導の法則に従い、閉回路の導体の一部は三相ステーター巻線から供給され、磁界はローター上の永久磁石から供給される。
外部トルクによってローターが回転すると、回転磁界が発生し、三相ステーター巻線の導体の一部が切断され、対称的な三相電流が誘導される。
この時点で、ローターの運動エネルギーが電気エネルギーに変換され、永久磁石同期モーターは発電機として機能する。
永久磁石同期モータの利点は、非同期モータに比べて小型、軽量、高出力密度、低エネルギー消費、低温度上昇、高効率などである。
要求に応じて、高起動トルク、高過負荷容量の構造モーターとして設計することができる。
永久磁石同期モータは、厳密に同期し、周波数制御に適した良好な動的応答性能を有し、電流と周波数を変更することにより、モータのトルクと速度を広い範囲で調整することができます。
しかし、永久磁石同期モータに使用される永久磁石材料は、通常、ネオジム鉄ボロン強磁性材料であり、比較的脆く、激しい振動で破壊する可能性がある。
さらに、ロータに永久磁石材料を使用すると、モータの運転中に磁気減衰が生じたり、過熱状態に陥ったりして、出力が低下する可能性がある。
現在、永久磁石同期モータは新エネルギー自動車用モータに広く使用されており、アジアとヨーロッパの新エネルギー市場では主に永久磁石同期モータが新エネルギー用モータとして使用されている。
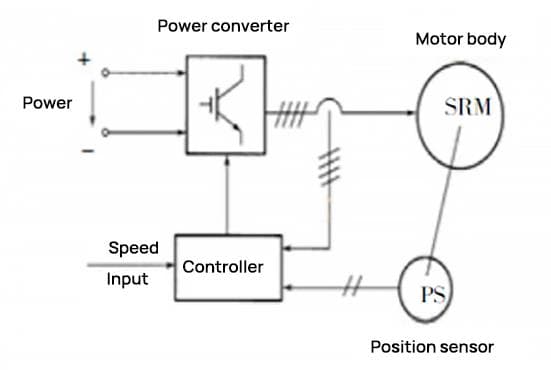
スイッチドリラクタンスモータ(SRM)は、典型的なメカトロニクスモータであり、"スイッチドリラクタンスドライブシステム "とも呼ばれる。モーターには主に、図5に示すように、SRM本体、電力変換器、ローター位置センサー、コントローラーの4つのコンポーネントが含まれる。
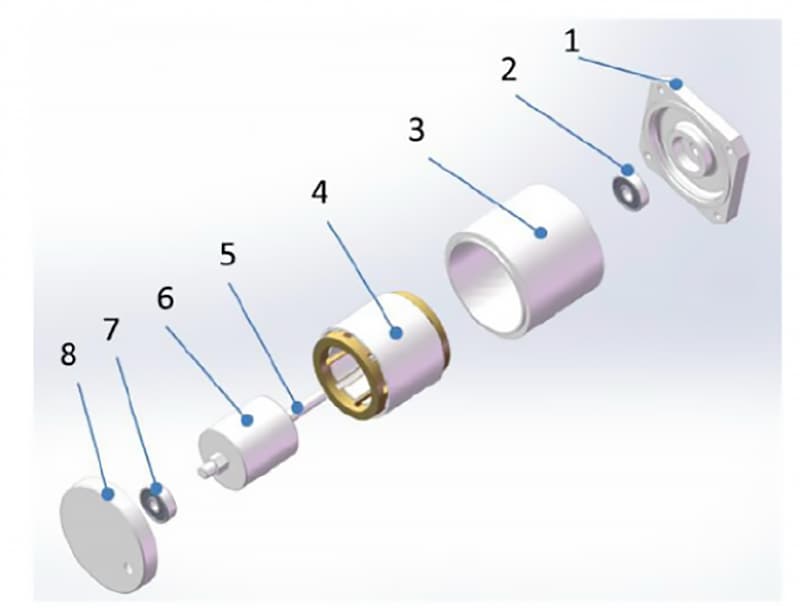
SRMの主要構造には、図6に示すように、ステーター、ローター、位置センサー、フロントとリアのベアリング、フロントとリアのエンドキャップ、モーターケーシングが含まれる。ステータはステータコアと巻線から構成される。

1- フロントエンドカバー
2- フロントエンドベアリング
3- ローター
4- モーターシャフト
5- ステーター
6- モーター・ハウジング
7- リアエンドベアリング
8- リアエンドカバー
9- ポジションセンサー
10- センサーメンテナンスカバー
11- 冷却ファン
12- ファンエンドカバー
ステーターコアとローターは共にサリエントポール構造を利用し、積層されたケイ素鋼板で構成されている。ステーターサリエントポールには巻線が装備されているが、ローターには巻線も永久磁石もない。
三相6/4極構造は、モータの固定子に6つの顕著極があり、回転子に4つの顕著極があることを示す。図7(a)に示すように、固定子の対称な2つの顕著極の集中巻線は直列に配線されて相を形成し、相の数は固定子の顕著極の数を2で割った数に等しい。

三相12/8極構造は、モーターの固定子に12個の顕著極があり、回転子に8個の顕著極があることを示す。図7(b)に示すように、固定子の対称な4つの顕著極の巻線は直列に配線されて相を形成し、相の数は固定子の顕著極の数を4で割った数に等しい。
スイッチドリラクタンスモータは、相数が多ければ多いほど、ステップ角が小さくなり、動作が滑らかになり、トルクリップルの低減に有利になる。しかし、制御が複雑になるため、主スイッチング装置の数が増え、コストが増加する。
ステップ角の計算は式(2)の通り:
α=360°×(固定子極数-回転子極数)/(固定子極数)
例えば、三相6/4極モーターの場合、ステップ角α=360°×2/(6×4)=30°となる。
(1) スイッチドリラクタンスモータの駆動原理
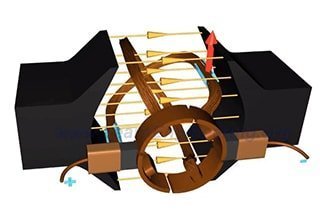
図8の三相12/8極SRMの動作原理図に示すように、A相巻線の電流が主スイッチS1、S2を閉じるように制御すると、A相は通電され磁化される。

モータ内で発生する磁界力は、OAを軸とする放射状の磁界を形成する。この磁界の磁力線は、ステータサリエントポールとロータサリエントポールの間のエアギャップを通過するところで曲げられている。
このとき、磁気回路の磁気リラクタン スは、ステータサリエントポールとロータサリエントポールが一致しているときよりも大きくなる。そのため、ロータサリエントポールには磁気吸引力が作用し、ロータポール軸Oaとステータポール軸OAが一致します。
これにより磁気リラクタンス特性の電磁トルクが発生し、ローターが反時計回りに回転し始める。A相電流をオフにしてB相電源を確立すると、モーター内の磁界は30度回転する。
その後、ローターは電磁吸引力の作用でさらに反時計回りに15度回転する。A-B-C-A相巻線に電力を順次供給すると、ローターは反時計回りに連続回転する。
各相の固定子巻線に順番に通電すると、固定子磁界は3×30度回転し、回転子は3×15度(=360度/回転子突極数)の回転子磁極ピッチで回転する。
A-C-B-A相巻線に順次電力が供給されると、ロータは時計回りに回転する。スイッチドリラクタンスモータの回転方向は、電流の方向とは関係なく、固定子相巻線の電源投入順序によって決まる。
多相モーターの実際の運転では、2つ以上の相巻線が同時に通電されることもよくある。
(2) スイッチドリラクタンス発電機の動作原理
スイッチドリラクタンス発電機の動作状態には、図10の相インダクタンスLの波形が示すように、励磁状態、継続状態、発電状態の3つの状態があります。


図 9 では、角度 θ をロータ歯極軸とステータ歯スロット軸の間の角度として定義しています。ローター歯極軸が対応するステーター歯スロット軸と一直線上にあるとき、位相インダクタンスは最小になります(θ=0°と定義)。巻線の位相インダクタンスは、ローターポールの前縁とステーターポールの後縁が出会うまで、Lminで一定です(θ=θ1)。
ローターが回転を続け、ローターポールがステーターポールと重なり始めると、ローターポールの後縁とステーターポールの後縁が完全に一致するまで(この時、θ=θ2)、巻線位相インダクタンスはこの領域内で直線的に増加し、最大Lmaxに達する。
ロータ極の前縁がステータ極の前縁に一致するようにロータが回転し続けると(この時、θ=θ4)、位相インダクタンスはLmaxのままである。
電磁界の基礎理論によれば、磁界の存在はモーターローターの電磁トルクを伴い、これは式(3)で表すことができる。
スイッチトリラクタンスモータの巻線がθ3とθ4の間でオン・オフされると、モータは発電機として動作する。このとき、減少インダクタンス領域に電流が形成されるため、dL/dθ<0となる。
このとき相巻線に電流が流れると、制動トルク(T(θ, i)<0)が発生します。外部の機械力がモータの回転を維持する場合、モータは機械エネルギーを吸収して電気出力に変換し、スイッチドリラクタンスモータが発電機モードで動作していることを示します。
スイッチドリラクタンスモータの利点は、構造が簡単で信頼性が高いこと、始動性が良いこと、効率が高いこと、コストが低いことです。導通、遮断角度、電圧を変化させることで、幅広い速度制御が可能です。しかし、トルクリップルが大きく、ノイズが大きいという欠点があります。
現在、電動四輪スクーターやパトカーなど、一部の小型電動車両に採用されている。
新エネルギー車の推進モーターに要求される明確な性能特性を考慮すると、選択される駆動モーターのタイプは市場のモデルによって異なる。
この記事では、AC非同期モータ、永久磁石同期モータ、スイッチドリラクタンスモータなど、一般的に使用される新エネルギー駆動モータの構造と動作原理について概説します。この情報は、これらの駆動モータの理解を深めるのに役立つ。
さらに、モーターの種類によって構造や原理が異なるため、応用範囲が広い。国家産業戦略計画の通り、環境に優しい新エネルギー車の電気駆動システムに焦点を当てた研究は今後も拡大し続ける。その結果、モーターの種類と技術レベルも進歩し続けるだろう。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。