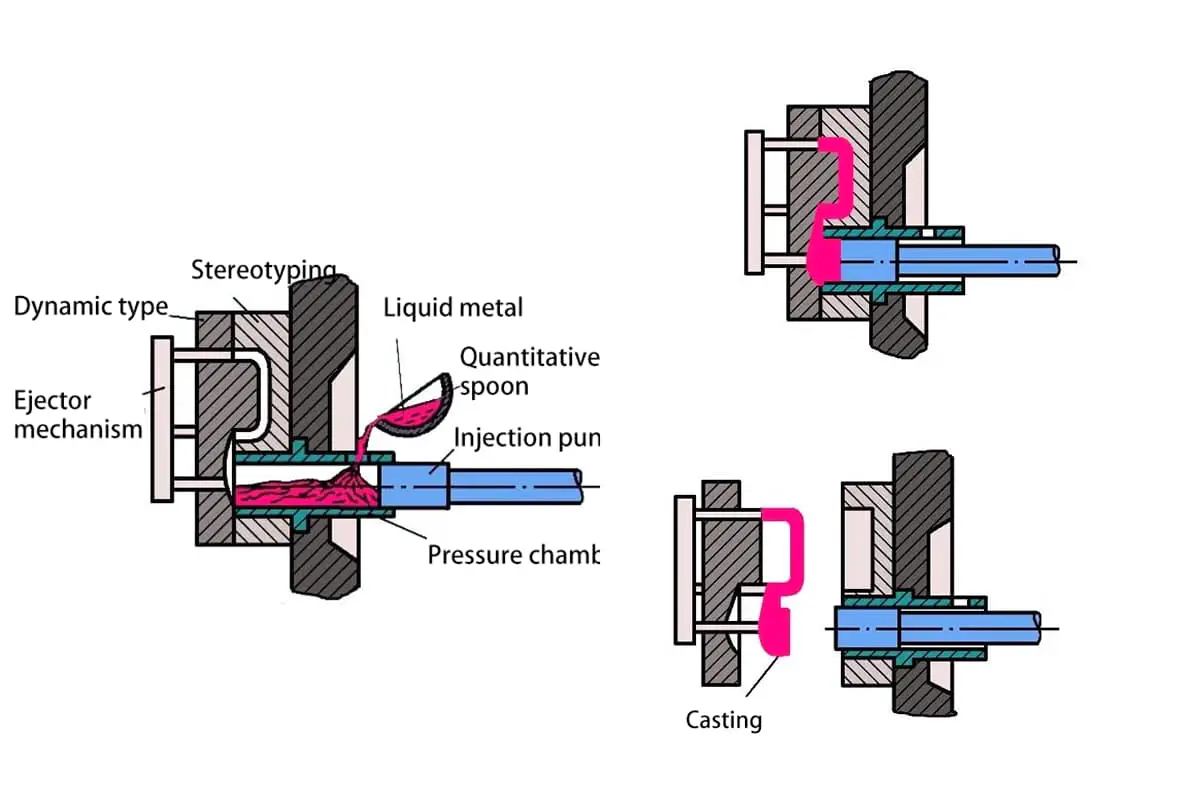
ダイカストの秘密を解き明かす:完全ガイド
車の部品がどのように精密に作られているのか、不思議に思ったことはありませんか?溶けた金属を高圧かつ高速で成形するダイカストの魅力的な世界に飛び込もう。
周波数コンバータがどのように機能し、なぜ現代の電気システムに不可欠なのか、不思議に思ったことはありませんか?この記事では、周波数コンバータに関するよくある質問を40個取り上げ、その機能、変調技術の違い、実用的なアプリケーションに光を当てます。モータの性能、エネルギー効率、運転の安全性に与える影響について学ぶことができます。経験豊富なエンジニアの方にも、好奇心旺盛な方にも、この包括的なガイドは、この重要なデバイスに対する理解を深めていただけることでしょう。

周波数変換器は、電源のオン・オフを切り替えるパワー半導体素子を用いて電源の周波数を調整する電気機器である。ソフト・スタート、周波数変換速度の調整、動作精度の向上、力率の調整、過電流、過電圧、過負荷に対する保護など、いくつかの機能を果たすことができる。

PWMとはPulse Width Modulation(パルス幅変調)の略で、パルス列のパルス幅を変えることで出力や波形を調整する技術です。
PAMとはPulse Amplitude Modulationの略で、パルス列のパルスの振幅を特定の法則に従って変化させることにより、出力値や波形を調整する方法である。
周波数コンバータの主回路は大きく2種類に分類できる:
電圧型周波数変換器は、直流電圧源を交流に変換する。このタイプの周波数変換器の直流回路フィルタはコンデンサです。
一方、電流モード周波数コンバータは、直流電流源を交流に変換する。このタイプの周波数コンバーターのDCループ・フィルターはインダクターです。
モータの電磁トルクは、電流と磁束の相互作用によって発生する。モータの過熱を避けるためには、電流を定格値内に保つことが極めて重要です。
磁束が減少すれば電磁トルクも減少し、モータの負荷容量が低下する。
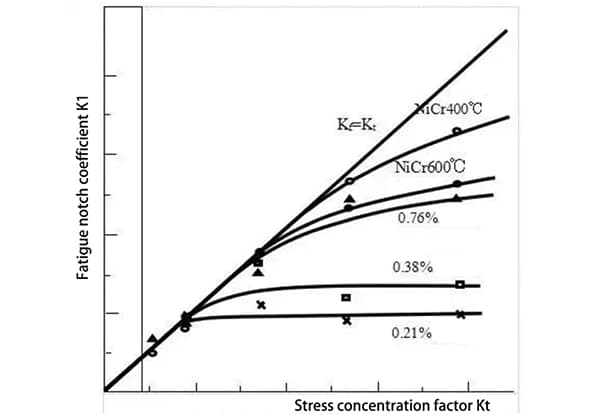
E=4.44の式からわかるようにKFNΦ、可変周波数速度調整中、モータの磁気回路は動作周波数fXによって大きく変化し、磁気回路の飽和を容易に引き起こし、励磁電流波形の深刻な歪みと高いピーク電流につながる。
弱い磁界と磁気飽和を避けるためには、周波数と電圧を比例して変化させること、つまり、周波数を変化させながら周波数コンバータの出力電圧を制御し、モーター内の磁束を一定レベルに保つことが重要である。
この制御モードは、ファンやポンプ用の省エネ周波数コンバーターで一般的に使用されている。
周波数が低下したとき(低速時)、同じ出力を維持すれば(出力一定)、電流は増加する。しかし、一定のトルクが維持されている状態(トルク一定)であれば、電流はほとんど変わりません。
周波数変換器は、モータの周波数と電圧を徐々に上昇させることにより、運転中に利用されます。始動電流は定格電流の150%以下に制限されています(機種により125%から200%の範囲)。
一方、電源周波数で直接始動する場合、始動電流は定格電流の6~7倍に達することがあり、機械的・電気的な衝撃を引き起こす。
周波数変換ドライブを使用することで、始動がスムーズになり、始動電流は定格電流の1.2~1.5倍、始動トルクは定格トルクの70%~120%となります。
自動トルク増強機能付き周波数変換器の場合、始動トルクは100%を超え、全負荷での始動が可能です。
周波数が低下すると、電圧(V)も比例して低下する。このVとfの関係は、以前、解答4で説明しました。
Vとfの比例関係は、モータの特性に基づいてあらかじめ決められている。通常、いくつかの特性オプションがコントローラの記憶装置(ROM)に記憶されており、スイッチやダイヤルによって選択することができる。
周波数の低下に比例して電圧が低下すると、交流インピーダンスが小さくなり、直流抵抗は変化しないため、低速時に発生する対地トルクは低下する傾向にある。
低周波数で一定の始動トルクを得るためには、出力電圧を上げる必要がある。この補正は強化始動として知られている。
自動的な方法、V/fモードの選択、ポテンショメーターの調整など、さまざまな方法で実現できる。
6Hz以下でもパワーは出力できるが、以下のような要素を考慮すると、使用可能な最低周波数は6Hz前後となる。 モーター温度上昇始動トルク、その他の条件。この周波数であれば、モーターは大きな加熱問題を起こすことなく、定格トルクを発生させることができる。
周波数コンバータの実際の出力周波数(始動周波数)は、モデルによって0.5~3Hzと異なる。
通常、そうではない。電圧が60Hz以上の場合(50Hz以上のモードもある)、一定の電力特性を示し、高速でも同じトルクを必要とする。
使用されるモーター装置は速度検出器(PG)を備え、実際の速度を制御装置にフィードバックして制御する。"クローズドループ "と呼ばれる。逆に、PG動作のないモーター装置は "オープンループ "と呼ばれる。
ほとんどの周波数コンバータはオープンループモードで動作するが、PGフィードバックのオプションを提供する機械もある。
速度センサーレス閉ループ制御モードは、事前に決定された数学モデルと磁束を使用してモーターの実際の速度を計算し、仮想速度センサーによる閉ループ制御を効果的に形成します。
オープンループシステムでは、周波数コンバータが特定の周波数を出力していても、負荷をかけて運転しているときは、モータの回転数は定格スリップ率(1%~5%)の範囲内で変化する可能性があります。
高い速度制御精度が要求され、負荷が変化してもモータを規定速度付近で動作させる必要がある用途には、PGフィードバック機能付き周波数コンバータを使用することができます(オプション機能)。
PGフィードバック機能付き周波数コンバータは精度を向上させます。しかし、速度精度はPGの精度と周波数コンバータの出力周波数の分解能の両方に依存します。
指定された加速時間が短く、周波数変換器の出力周波数が速度(電気角周波数)の変化よりはるかに速く変化した場合、周波数変換器はトリップし、ストールと呼ばれる過電流により動作しなくなる可能性があります。
ストールを防ぎ、モーターが確実に動き続けるようにするには、電流をモニターし、周波数をコントロールする必要がある。
加速電流が大きくなりすぎた場合は、それに応じて加速度を落とす必要があります。減速時も同様である。
これらの動作の組み合わせは、ストール機能として知られている。
加速と減速を別々に指定できます。これは、短時間の加速と低速の減速、または生産拍動時間を厳密に定義する必要がある小型工作機械に適しています。
ただし、ファン・トランスミッションなど加減速時間が長い用途では、加速時間と減速時間を一緒に指定することができる。
運転中にモータの指令周波数が低下すると、モータは非同期発電機となり、回生(電気)ブレーキとして知られるブレーキの役割を果たす。
回生制動時にモーターが発生するエネルギーは、周波数変換器のフィルターコンデンサに蓄えられる。
しかし、一般的な周波数変換器の回生制動力は、コンデンサ容量と耐電圧の関係から、定格トルクの10%~20%程度に制限される。
オプションのブレーキユニットを使用することで、回生制動力を50%~100%まで高めることができる。
保護機能は2つのカテゴリーに分けられる:
(1)過電流ストール防止、回生過電圧ストール防止など、異常状態検出後の補正動作を自動的に行う。
(2) 異常検出後、パワー半導体素子のPWM制御信号を遮断し、モータを自動停止させる。例えば、過電流遮断、回生過電圧遮断、半導体冷却ファンの過熱、瞬停保護など。
負荷の接続にクラッチを使用すると、接続の瞬間にモータは無負荷状態からスリップ率の高い領域に突然遷移する。その結果、大電流が流れて周波数変換器が過電流によりトリップし、運転ができなくなる。
モータが始動すると、容量に比例した始動電流が流れ、モータのステータ側のトランスに電圧降下が生じます。モータの容量が大きい場合、この電圧降下は大きな影響を与えます。
同じ変圧器に接続された周波数変換器は、不足電圧を検出するか、瞬時停止をトリガーする可能性がある。その結果、保護機能(IPE)が作動し、運転が停止することがあります。
デジタル制御の周波数変換器では、周波数指令がアナログ信号であっても、出力周波数は増分で設定される。この増分の最小単位は周波数変換分解能と呼ばれ、通常は0.015~0.5Hzである。
例えば、分解能が0.5Hzの場合、23Hzから23.5Hz、24.0Hzのように0.5Hz刻みで周波数を変えることができ、モーターも刻みで動作する。
これは、連続的なコイリング制御を必要とするアプリケーションでは問題が生じる可能性がある。このような場合、約0.015Hzの分解能を推奨する。この分解能であれば、4段モータの1段の差は1R/min以下となり、十分な精度が得られます。機種によっては指定分解能と実際の出力分解能が一致しない場合がありますのでご注意ください。
周波数変換器の冷却効果は、その内部および背面構造の設計において考慮されます。適切な換気はユニットの向きにも左右されます。
したがって、パネル型ユニットや壁掛け型ユニットは、可能な限り垂直に設置することを推奨する。
非常に低い周波数でモータを始動することは可能ですが、指定周波数が高い場合、電力周波数電源で直接始動するのと同様となります。この場合、始動電流が大きくなり(定格電流の6~7倍)、周波数変換器が過電流でトリップしてモータが始動できなくなります。
60Hz以上で使用する場合は、以下の事項に注意すること:
(1) 機械的強度、騒音、振動などの要素を考慮し、機械や装置がこの速度で運転できることを確認する。
(2) モータが定電力出力域に達したとき、その出力トルクは運転を維持するのに十分でなければならない。なお、ファン、ポンプなどの軸の出力は回転数の3乗に比例して増加するので、回転数の増加には注意すること。
(3) ベアリング寿命への影響を考慮する。
(4) 中容量以上のモーター、特に2極モーターについては、60Hz以上で運転する前にメーカーに相談することが重要である。
レデューサーを使用する際には、その構造や以下のようないくつかの問題に留意する必要がある。 潤滑方法.
歯車構造では、最大70~80Hzの制限を考慮すべきである。
オイル潤滑を使用する場合、低速での連続運転はギアの破損の原因となります。
基本的にはありません。ガバナースイッチ始動タイプの単相モータの場合、補助巻線は動作点以下の速度調整範囲で焼損する可能性があります。
コンデンサ始動またはコンデンサ運転モードでは、コンデンサの爆発が発生する可能性がある。
周波数変換器の電源は通常三相だが、小容量の場合は単相電源も使用できる。
周波数変換器の効率は、モデル、動作状態、使用頻度など、いくつかの要因に依存します。明確な答えを出すのは難しい。
しかし、60Hz以下で動作する周波数コンバータの効率は約94%~96%と推定される。これは損失計算の基礎として使用できる。
ブレーキ時の損失を考慮すると、消費電力が高くなる可能性があることに注意することが重要である。
効果的な操作パネルの設計も非常に重要であり、細心の注意を払う必要がある。
一般的に、モーターはシャフトに取り付けられた外部ファン、またはローターエンドリングのブレードによって冷却される。
回転数が落ちれば冷却効果も落ち、高速走行時と同じレベルの熱に対応できなくなる。
これを防ぐには、低速時の負荷トルクを下げるか、大容量の周波数変換器をモーターと組み合わせて使うか、低速運転用に設計された特殊なモーターを選ぶ必要がある。
ブレーキ励磁回路の電源は、周波数コンバータの入力側から取る。
周波数コンバータがまだ電力を出力しているときにブレーキがかかると、過電流遮断になることがあります。
これを防ぐには、周波数コンバーターの出力が停止してからブレーキがかかるようにすることが重要です。
周波数変換器のコンデンサが周波数変換器撤去後の実効力率に与える影響については、周波数変換器のコンデンサに流れる電流による力率を改善するための対策を講じる必要がある。
周波数コンバーターは静的な装置だが、フィルター・コンデンサーや冷却ファンといった消耗品も含まれている。
適切なメンテナンスを行えば、これらの部品は10年以上の耐用年数が期待できる。
冷却ファンの有無にかかわらず、小容量モデル用:
ファン付きモデルの場合、空気は下から上に流れますので、周波数変換器を設置する場所の上下に吸排気を妨げるような機械装置を置かないことが重要です。
さらに、熱に敏感な部品を周波数コンバータの上に置かないようにすることも重要です。
ファンが故障した場合、周波数変換器は電動ファンの停止検出または冷却ファンの過熱検出によって保護されます。
フィルターコンデンサとして使用されるコンデンサは、静電容量が時間とともに徐々に減少する。
定期的に静電容量を測定し、製品の定格容量の85%に達しているかどうかで耐用年数を評価することをお勧めします。
通常、コンデンサは円盤状の容器に収納する。
しかし、完全に密閉された円盤状の容器はかなり大きくなり、かなりのスペースを占め、比較的高価である。
これらの問題に対しては、以下のような対策が考えられる:
(1) ディスクの設計は、装置の放熱要件を考慮すべきである;
(2)冷却面積を増やすために、アルミフィンとフィン付きクーラントを使用することができる。
入力電流の高次高調波干渉を低減し、入力電源の力率を改善する。
正弦波フィルターは、周波数変換器が長いモーターケーブルで機能することを可能にし、周波数変換器とモーターの間に中間トランスを含む回路にも適しています。
周波数コンバーターに付属するポテンショメーターの抵抗値は、通常1KΩから10KΩの範囲です。
(1) 放射線妨害;
(2) 伝導妨害。
放射線を介して伝送される干渉信号については、放射線の発生源と妨害線を適切に配線し、シールドすることで効果的に低減することができる。
周波数コンバータの入力側と出力側にフィルター、リアクトル、磁気リングを追加することで、ラインを通じて伝送される干渉信号に対処することができる。
具体的な干渉低減方法と注意事項は以下の通り:
(1) 信号線と電力線は垂直に交差させるか、束ねる。
(2) 異種金属 お互いに。
(3) シールド層は適切に接地されるべきであり、接地はその全長にわたって連続的で信頼できるものでなければならない。
(4) 信号回路にはツイストペアシールドケーブルを使用する。
(5) 遮蔽層の接地点は、周波数変換器からできるだけ離し、周波数変換器の接地点とは別にする。
(6) 周波数コンバータの入力電源ラインと出力ラインに磁気リングを使用することができる。
磁気リングの具体的な使用方法は以下の通り:入力ラインは同じ方向に4回巻くことができ、出力ラインは同じ方向に3回巻くことができる。
巻線時には、磁気リングを周波数変換器にできるだけ近づけることが重要です。
(7)また、干渉を防止するために、妨害された機器や計器にシールドなどの干渉防止対策を施すことができる。
ベルトコンベヤーが消費する電力は、その速度に正比例する。
従って、80Hzで運転したい場合は、周波数コンバータとモータの電力を比例して増加させる必要があり、50Hzの容量から60%増加することになります。つまり、周波数変換器とモーターの容量を60%増やさなければなりません。
VVC(可変電圧・可変周波数)制御では、制御回路が数学的モデルを利用して、モーター負荷の変化に応じて最適なモーター励磁を計算し、それに応じて負荷を補正する。
さらに、制御回路にはASIC(特定用途向け集積回路)上に実装された同期60度PWM方式が組み込まれており、インバーター半導体素子(IGBT)の最適なスイッチング時間を決定する。
可変周波数電源装置の回路全体は、AC定電流やACフィルターなどのコンポーネントで構成され、その結果、理想的なAC電源に酷似した純粋な正弦波出力電圧・電流波形が得られる。
世界中のあらゆる国のグリッド電圧と周波数を生成することができる。
一方、周波数変換器は交流定電流AC(変調波)回路などの部品で構成されている。この装置の標準的な名称は可変周波数ガバナである。
しかし、周波数変換器の出力電圧波形は、高調波成分を多く含むパルス矩形波である。電圧と周波数が同時に比例して変化し、単独で調整できないため、電源としての使用には適さない。
通常、三相非同期モーターの速度調整にのみ使用される。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。