電動モーターの温度制限:性能の保護
電気モーターがオーバーヒートすることなくスムーズに作動しているのはなぜか、不思議に思ったことはありませんか?モーターの安全な動作温度を理解することは、モーターの寿命と性能にとって非常に重要です。この記事では...
自動車も、家電製品も、産業機械もない。モーターは電気エネルギーを機械エネルギーに変換し、玩具から巨大製造業まであらゆるものに動力を与えている。この記事では、様々なタイプのモーター、その動作原理、そしてその用途についてご紹介します。これらの基本を理解することで、この不可欠なデバイスがどのように私たちの現代生活を形成し、産業界に革新をもたらすかについて洞察することができます。

世界の電力消費の半分近くはモーターに起因しており、モーターの効率的な使用は、世界のエネルギー問題に対処するための最も効果的な方策のひとつとなっている。
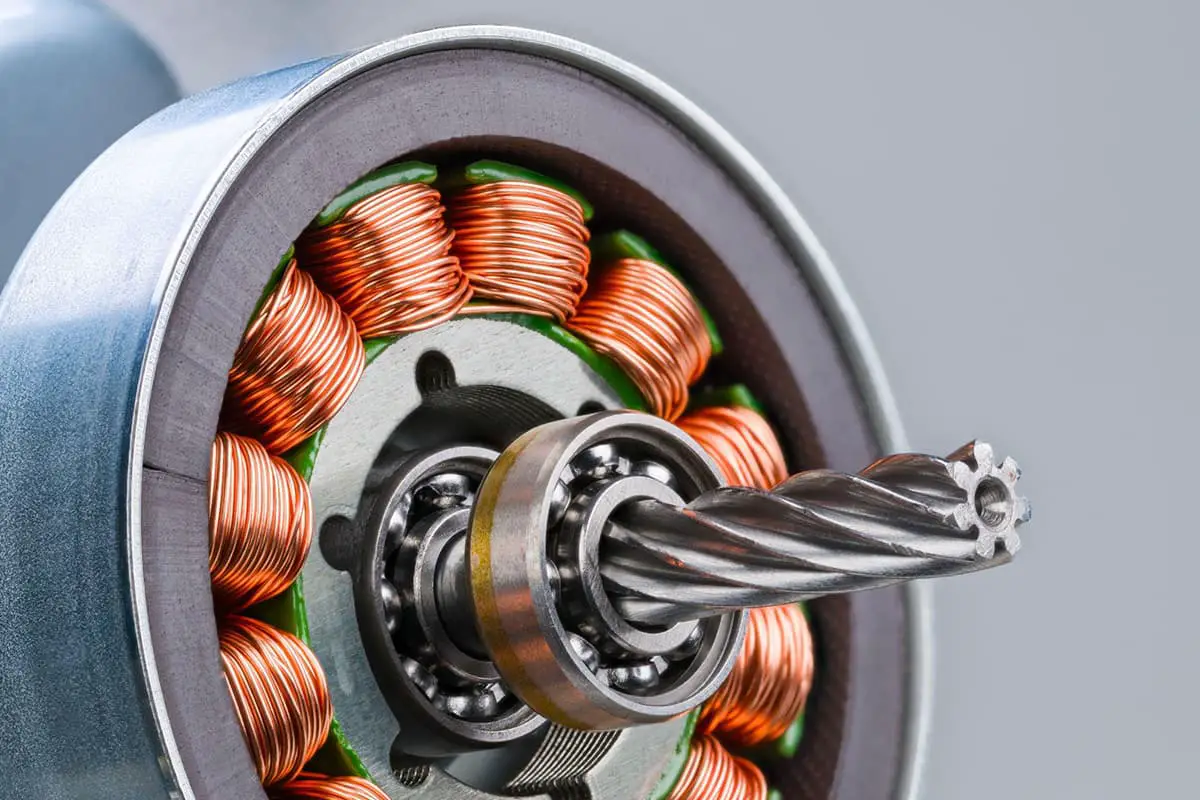
モーターは電気エネルギーを機械エネルギーに変換する装置である。モーターは、回転磁界を発生させるために動力コイル(固定子巻線)を利用し、この磁界が回転磁気トルクを発生させるために回転子(リスケージ型密閉アルミフレームなど)に作用する。
モーターは、使用される電源の種類によって直流(DC)モーターと交流(AC)モーターに分けられる。電力系統のモータのほとんどは交流モータで、同期式と非同期式(モータの固定子磁界の回転速度と回転子の回転速度が同期していない)がある。
モーターは主にステーターとローターから構成される。磁界中の被動導体の運動方向は、電流の方向と磁力線の方向に関係している。モータの動作原理は、磁界が電流に及ぼす力によってモータが回転することである。
モータ制御とは、モータの始動、加速、運転、減速、停止を制御することである。モータの種類や使用される状況によって要求される条件や目的は異なる。モータの場合、モータ制御によって、高速始動、高速応答、高効率、高トルク出力、高過負荷容量という目標が達成される。
ここでいう標準モータ、サーボモータ、ステッピングモータ、サーボモータとは、私たちがよく目にする直流マイクロモータのことである。モーターは「モータ」とも呼ばれ、ファラデーの電磁誘導の法則に従って電磁エネルギーの変換または伝達を維持するこの電磁誘導装置を指す。
モーターは「電気機械」とも呼ばれ、電源回路では英字の「M」(以前は「D」)で表される。主な機能は、電化製品や各種機械の動力源として駆動トルクを発生させることである。発電機は、回路では「G」で表される。
一般にモーターとは、磁界中の電流の流れによって発生する力を回転運動に変換する装置を指し、広い意味では直線運動も含まれる。
モーターは、その動力源によって2つのカテゴリーに分類することができる:DCモーターとACモーターである。
また、特殊なモーターを除いて、回転原理によって大まかに分類することもできる。
ブラシ付きモーター
広く使われているブラシ付きモーターは、一般にDCモーターと呼ばれる。ブラシ」と呼ばれる電極(固定子側)と「整流子」と呼ばれる電極(電機子側)を介して電流を切り替えることにより、回転子が回転します。
ブラシレスDCモーター
このモーターはブラシや整流子を必要とせず、代わりにトランジスタなどのスイッチング機能を使って電流を切り替え、モーターを回転させる。
ステッピングモーター
このモーターはパルスパワーに同期して動作するため、パルスモーターとも呼ばれる。位置決め操作が簡単で正確なのが特徴です。
非同期モーター
交流電流はステーターに回転磁界を発生させ、ローターに誘導電流を発生させ、その相互作用で回転する。
同期モーター
交流は回転磁界を作り出し、磁界を持つローターは引力によって回転する。回転数は電源周波数に同期している。
電流、磁場、力について
まず、モーターの原理を説明しやすくするために、電流、磁界、力の基本法則をおさらいしておこう。懐かしさもあるが、磁性部品を使う機会が少ないと忘れがちな知識である。
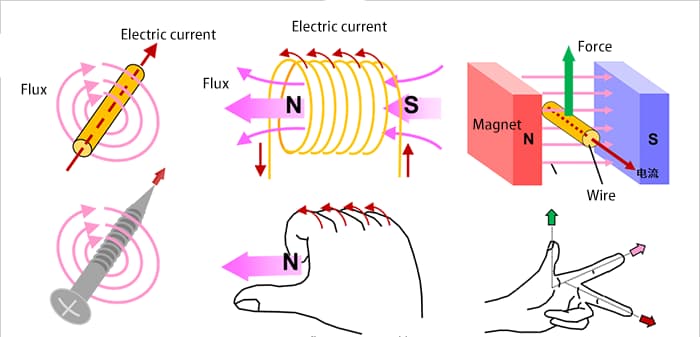
絵と数式を使って説明します。

ワイヤーループが長方形の場合、電流に作用する力を考える必要がある。
側面aとcに作用する力Fは、以下の式で計算できる:

これにより中心軸にトルクが発生する。
例えば、回転角がθだけの状態を考えると、直角のbとdに働く力はsinθとなる。したがって、a側のトルクTaは次式で表すことができる:

同様に側面cを考慮すると、トルクは2倍になり、以下の式で計算されるトルクが発生する:

長方形の面積はS=h×lであるから、これを上式に代入すると次のようになる:

この式は長方形だけでなく、円など他の一般的な形状にも適用できる。モーターはこの原理を利用している。
電動玩具や電気カミソリなどの日用品によく見られる標準的なモーターは、一般的に直流ブラシ付きモーターである。高速・低トルクが特徴で、動作に必要なピンは2本だけ。バッテリーのプラス端子とマイナス端子に接続すると、モーターが回転を始める。接続を逆にすると、モーターは逆方向に回転する。
減速モーターとは、標準モーターにギアボックスを取り付けたものである。この設計により、トルクを増加させながら回転速度を低下させることができ、標準モータの実用範囲を拡大することができる。
サーボモーターは、主にシェル、回路基板、コアレスモーター、ギア、位置検出器から構成されている。受信機からサーボモーターへの信号を受けて動作する。オンボードICが回転方向を決定し、コアレスモーターを駆動して回転を開始する。
その動きは減速ギアを介してスイングアームに伝達され、同時に位置検出器が信号を送り返し、意図した位置に到達したかどうかを確認する。位置検出器は可変抵抗器で、サーボモーターが回転すると抵抗値が変化する。この抵抗値を検出することで、回転角度を求めることができる。
スペック提供 サーボモーターメーカー 通常、寸法(mm)、トルク(kg/cm)、速度(sec/60°)、試験電圧(V)、重量(g)が含まれる。トルクの単位はkg/cmで、スイングアームの長さ1cmで何kg持ち上げられるかを示す。
これは、てこアームの概念で、アームが長いほどトルクは小さくなる。速度の単位はsec/60°で、サーボモーターが60°回転するのに要する時間を表します。
ステッピングモーターは、電気パルス信号を角度または直線変位に変換するオープンループ制御素子です。無負荷状態では、モータの速度と停止位置は、負荷の変化に関係なく、パルス信号の周波数と数のみに依存します。
ステッパ・ドライバがパルス信号を受け取ると、ステッパ・モータを駆動して、「ステップ角」と呼ばれる一定の角度を所定の方向に回転させる。その回転は、一定の角度単位で進行する。パルスの数を制御することで、角度変位を管理し、正確な位置決めを行うことができる。同様に、パルス周波数は、モータの回転速度と加速度を制御するために使用することができ、速度制御を実現します。
サーボモータはアクチュエータモータとも呼ばれ、自動制御システムの実行ユニットとして機能し、受信した電気信号をモータシャフト上の角変位または角速度出力に変換する。
直流(DC)サーボモーターと交流(AC)サーボモーターに大別される。これらのモータの主な特徴は、信号電圧がゼロのときには自転現象がなく、トルクが増加するにつれて回転速度が一様に低下することである。
サーボモーターは主にパルスを利用して位置決めを行う。基本的に、サーボモーターはパルスを受信するごとにパルスに対応する角度だけ回転し、それによって変位を実現する。サーボモーター自体がパルスを発信する能力を持っているため、回転する度に対応する数のパルスを発信する。
これにより、受信したパルスに応答する、あるいは「閉ループ」システムが形成される。このようにして、システムはサーボモーターに送られたパルスの数と、戻ってきたパルスの数を知ることができる。その結果、モーターの回転を非常に正確に制御することができ、0.001mmまでの正確な位置決めが可能になります。
サーボモーターはACサーボとDCサーボに大別される。
ACサーボモーターはさらに、非同期ACサーボモーターと同期ACサーボモーターに分けられる。
DCサーボモーターは、ブラシ付きモーターとブラシレスモーターに分けられる。ブラシ付きモーターは低コストで構造が単純で、高い始動トルクを発生し、速度制御範囲が広く、制御が容易である。ブラシ付きモーターはメンテナンスが必要だが、(ブラシ交換など)不便で、電磁干渉を発生し、特定の環境要件がある。そのため、コスト重視の一般産業用や民間用途に適している。
1)磁石と磁力でモーターを回転させる
永久磁石の周りに回転軸がある、
これがモーター回転の基本原理である。

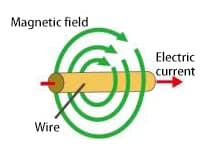
ワイヤーに電流を流すと、その周りに回転磁界(磁力)が発生し、磁石が回転する。
実際、これは先に説明したのと同じ動作状態である。
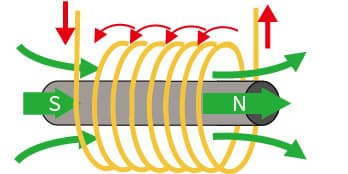
さらに、ワイヤーをコイル状に巻くと、磁力が合わさって大きな磁場(磁束)が形成され、N極とS極が発生する。
コイル状のワイヤーに鉄芯を入れることで、磁力線が通りやすくなり、より強い磁力が発生する。
2)実用回転モーター
ここでは、三相交流とコイルを使って回転磁界を発生させ、回転モーターとして実用化する方法を紹介する。
(三相交流は位相差120°の交流信号である)。

上記①の状態における複合磁場は、下図①に相当する。
上記の状態②における複合磁場は、下の図②に対応する。
上記の状態③における複合磁場は、下の図③に対応する。

前述のように、鉄心に巻かれたコイルは3相に分かれており、U相コイル、V相コイル、W相コイルが120度間隔で配置されている。
高電圧のコイルはN極を発生させ、低電圧のコイルはS極を発生させる。
各相が正弦波に従って変化するので、各コイルの極性(N極、S極)と磁場(磁力)が変化する。
この時、N極を発生させるコイルを見ると、U相コイル→V相コイル→W相コイル→U相コイルと順次変化し、回転を起こす。
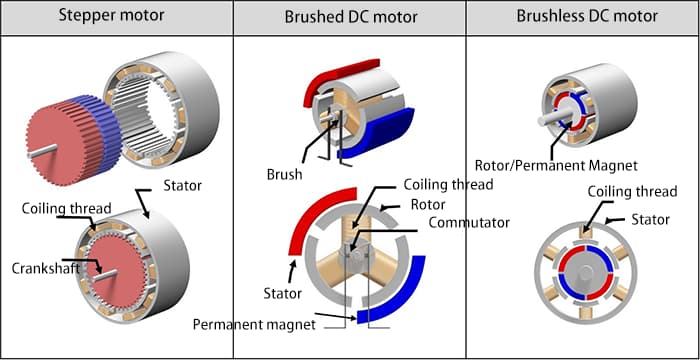
下図は、ステッピングモーター、ブラシ付きDCモーター、ブラシレスDCモーターの3種類のモーターのおおよその構造と比較です。
これらのモータの基本構成部品は主にコイル、マグネット、ロータであり、その種類の違いからコイル固定型とマグネット固定型に分類される。
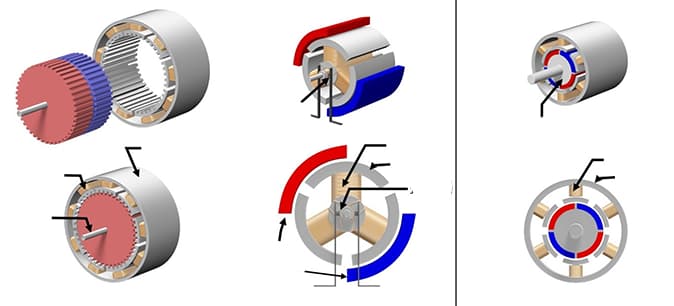
以下は例の図に関連した構造説明である。もっと細かく分ければ他の構造もあるかもしれないので、今回は全体的な構造を説明しているとご理解いただきたい。
ここに示すステッピング・モーターは、コイルが外側で固定され、磁石が内側で回転する。
ここに示すブラシ付きDCモーターは、マグネットが外側で固定され、コイルが内側で回転する。ブラシと整流子は、コイルに電力を供給し、電流の向きを変える役割を担っている。
ここに示したブラシレス・モーターは、コイルが外側で固定され、磁石が内側で回転する。
モーターの種類が異なるため、基本的な構成部品は同じでも構造が異なる場合があります。詳しい説明は各章で行う。
ブラシ付モータの構造
模型でよく使われるブラシ付きDCモーターの外観と、一般的な2極(マグネット2個)、3スロット(コイル3個)モーターの分解図を以下に示す。モーターを分解して磁石を取り外した経験がある人も多いだろう。
見てわかるように、ブラシ付きDCモーターの永久磁石は固定されており、コイルはモーターの内部中心の周りを回転することができる。固定側を "ステーター"、回転側を "ローター "と呼ぶ。

以下は、モーターの構造概念を表す模式図である。
回転する中心軸の外周には3枚の整流子(電流を切り替えるための湾曲した金属板)がある。互いに接触しないよう、整流子は120度(360度÷3)間隔で配置されている。整流子は軸の回転とともに回転する。
各整流子は、一方のコイル端と他方のコイル端に接続され、3つの整流子と3つのコイルが全体として回路網を形成する(リング状)。
2本のブラシが0°と180°に固定され、整流子と接触する。外部直流電源がブラシに接続され、ブラシ→整流子→コイル→ブラシの経路で電流が流れる。
ブラシ付きモーターの動作原理。

初期状態から反時計回りに回転
初期状態ではコイルAが上側にあり、電源は左(+)側と右(-)側が規定されたブラシに接続されている。左ブラシから整流子を通ってコイルAに大電流が流れ、コイルAの上側(外側)がS極構造になる。
左ブラシからコイルBとCに向かってコイルAを流れる電流の半分は、コイルAとは逆方向なので、コイルBとCの外側が弱いN極(図では小さい文字で表されている)になる。
これらのコイルに発生する磁界と磁石間の反発と引力によって、コイルは反時計回りに回転する。
さらに反時計回りに回転
コイルAが反時計回りに30度回転した状態にあると仮定すると、右ブラシは2つの整流子に接触する。
コイルAの電流は左のブラシから右のブラシを通って流れ続け、コイルAの外側はS極のままである。
コイルBにはコイルAと同じ電流が流れ、コイルBの外側はより強いN極となる。
コイルCの両端はブラシによって短絡されているため、電流は流れず、磁界も発生しない。
この場合でも、コイルは反時計回りの回転力を受ける。
から④にかけては、上側のコイルは左向きの力を受け続け、下側のコイルは右向きの力を受け続け、反時計回りに回転し続ける。
コイルが③と④の状態に30度回転するたびに、コイルの外側が中央の水平軸より上にあるときはS極、下にあるときはN極となり、この動きを繰り返す。
つまり、上側のコイルは左向きの力を、下側のコイルは右向きの力を繰り返し受ける(いずれも反時計回り方向)。これにより、ローターは反時計回りに回転し続ける。
逆の左ブラシ(-)と右ブラシ(+)に電源を接続すると、コイルは逆方向に磁界を発生させ、コイルに加わる力の方向が逆になり、時計回りに回転する。
さらに、電源が切断されると、回転を維持する磁界がないため、ブラシ付きモーターのローターは回転しなくなる。
三相全波ブラシレスモータの外観と構造
ブラシレスモーターの外観と構造の一例を下図に示す。

左はディスク再生装置でディスクを回転させるスピンドルモーターの例。コイルは3相×3で合計9個。
右はFDD装置用スピンドルモーターの例で、12個のコイル(3相×4)を持つ。コイルは回路基板に固定され、鉄心に巻かれている。
コイルの右側にある円盤状の部品が永久磁石ローター。外周は永久磁石でできており、ローターシャフトはコイルの中心に挿入され、コイルの一部を覆っている。永久磁石はコイルの外周を回転する。
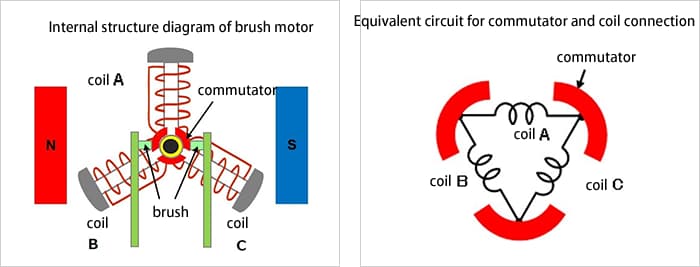
三相全波ブラシレスモーターの内部構造図とコイル接続の等価回路。
以下は、内部構造とコイル接続の等価回路を簡略化した図である。

簡略化した図は、単純な構造の2極(2個の磁石)3スロット(3個のコイル)モーターを示している。ブラシ付き モーター構造 同じ極数とスロットを持つが、コイル側は固定され、磁石は回転できる。もちろんブラシはない。
この場合、コイルはY字型に接続され、コイルへの電流供給には半導体部品が使用される。電流の流れは、回転する磁石の位置に基づいて制御される。
この例では、磁石の位置を検出するためにホール素子が使用されている。ホール素子はコイルの間に配置され、磁界の強さによって発生する電圧を検出し、これを位置情報として使用する。先に紹介したFDD装置用スピンドルモーターの画像でも、位置検出用のコイルの間(コイルの上)にホール素子が見える。
ホール素子はよく知られた磁気センサーで、磁界の大きさを電圧の大きさに変換し、磁界の方向をプラスまたはマイナスの電圧で表します。
以下はホール効果を示す模式図である。
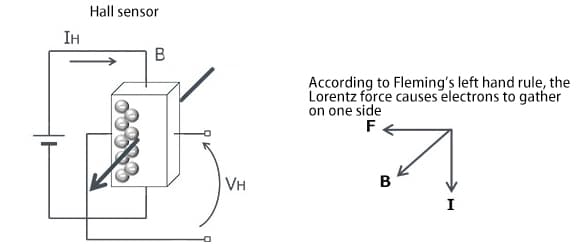
ホール素子は、"半導体に電流IHを流し、電流に垂直な方向に磁束Bを流すと、電流と磁界の両方に垂直な方向に電圧VHが発生する "という現象を利用している。アメリカの物理学者エドウィン・ハーバート・ホールがこの現象を発見し、"ホール効果 "と名付けた。発生する電圧VHは以下の式で表される:
VH = (KH / d)・IH・B
KH:ホール係数、d:磁束侵入面の厚さ
式に示すように、電流が大きいほど電圧が高くなる。この特性は、ローター(磁石)の位置を検出するためによく使われる。
三相全波ブラシレスモーターの回転原理
ブラシレスモーターの回転原理をステップ1からステップ6まで説明する。理解しやすくするため、永久磁石を円形から長方形に単純化している。
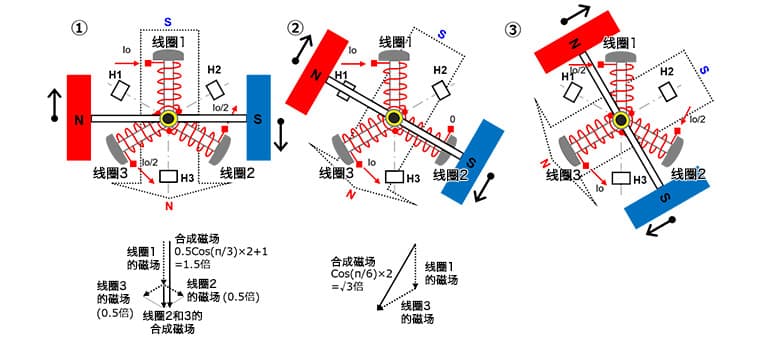
三相コイルシステムにおいて、コイル1は時計の12時の位置、コイル2は時計の4時の位置、コイル3は時計の8時の位置に固定されている。N極が左、S極が右の2極永久磁石は回転できる。
コイル1にIoの電流を流し、コイルの外側にS極磁界を発生させる。コイル2と3にIo/2の電流を流し、コイルの外側にN極の磁場を発生させる。
コイル2と3の磁界をベクトル結合すると、下向きのN極磁界が発生する。この磁界は、1つのコイルを流れる電流Ioによって発生する磁界の0.5倍であり、コイル1の磁界に加わると1.5倍になる。これにより、永久磁石に垂直な複合磁界が発生し、最大トルクが発生して永久磁石が時計回りに回転する。
回転位置に基づいてコイル2に流れる電流が減少し、コイル3に流れる電流が増加すると、複合磁場も時計回りに回転し、永久磁石が回転し続ける。
30度回転させた状態で、コイル1に電流Ioを流し、コイル2の電流をゼロにして、コイル3から電流Ioを流す。
コイル1の外側がS極、コイル3の外側がN極となる。ベクトル的に結合すると、発生する磁界は、電流Ioが1つのコイルを通過するときに発生する磁界の√3(≒1.72)倍となる。また、永久磁石に垂直な磁場が発生し、時計回りに回転する。
回転位置が変化すると、コイル1に流れる電流は減少し、コイル2に流れる電流はゼロからスタートして増加し、コイル3から流出する電流はIoまで増加する。その結果、合成磁界も時計回りに回転し、永久磁石は回転し続ける。
各相電流を正弦波とすると、ここでの電流値は Io × sin(π⁄3) = Io × √3⁄2 となる。磁界のベクトル結合により、総磁界の大きさはコイル1個で発生する磁界の1.5倍となる。
各相電流が正弦波である場合、永久磁石の位置に関係なく、ベクトル的に合成された磁場の大きさは、常に単一のコイルによって生成された磁場の1.5倍であり、磁場は永久磁石の磁場に対して90度の角度で垂直である。
30度回転を続けると、コイル1にはIo/2の電流が流れ、コイル2にはIo/2の電流が流れ、コイル3からはIoの電流が流れ出る。
コイル1の外側はS極、コイル2の外側もS極、コイル3の外側はN極となる。ベクトル的に結合すると、発生する磁界は、1つのコイルにIoの電流を流したときに発生する磁界の1.5倍となる(ステップ1と同じ)。また、永久磁石の磁界に対して90度の角度で垂直に、時計回りに回転する磁界も発生する。

④-⑥
ステップ1~3と同様に回転を続ける。
このように、永久磁石の位置に応じてコイルに流す電流を連続的に切り替えれば、永久磁石は一定方向に回転する。同様に、電流を逆方向に流して合成磁界の向きを逆にすれば、反時計回りに回転する。
次の図は、1から6までの各ステップについて、各コイルに流れる電流を示している。
以上の説明で、電流の変化と回転の関係が理解できたはずだ。

ステッピングモーターは、パルス信号に同期して回転角度と速度を精密に制御できるモーターの一種です。ステッピングモーターは「パルスモーター」とも呼ばれる。
ステッピングモーターは、位置センサーを使用せず、オープンループ制御のみで正確な位置決めができるため、位置決めが必要な機器に広く使用されています。
ステッピングモーターの構造(二相バイポーラ)
左からステッピングモーターの外観例、内部構造の模式図、構造の概念図です。

外観の例では、HB型(ハイブリッド型)とPM型(永久磁石型)の両方のステッピングモーターが示されている。真ん中の回路図もHBタイプとPMタイプの両方の構造を示しています。
ステッピングモーターはコイルが固定され、永久磁石が回転する構造になっています。右のステッピングモーターの内部構造の概念図は、2相(2組)コイルのPMモーターの例です。
ステッピングモーターの基本構造の例では、外側にコイル、内側に永久磁石が配置されている。2相のほか、3相、5相など相数の多いタイプもある。
ステッピングモーターの中には異なる構造を持つものもあるが、ステッピングモーターの基本的な動作原理を説明するために、この記事では固定コイルと回転永久磁石という基本構造を持つステッピングモーターを紹介する。
ベーシック ステッピングモーターの動作原理 (単相励磁)
ステッピングモーターの基本的な動作原理を下図を用いて説明します。前図の2相バイポーラコイルの各相(1組のコイル)を①から④に状態変化させた場合の励磁例です。コイルは①と②で構成され、電流の矢印は電流の流れる方向を示しています。
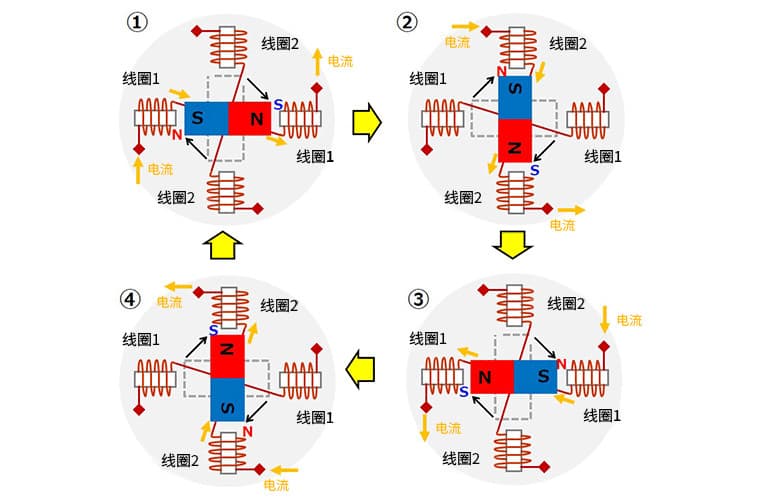
①
電流はコイル1の左側から流れ、右側から抜ける。
コイル2に電流を流さないでください。
このとき、左コイル1の内側は北になり、右コイル1の内側は南になる。
その結果、真ん中の永久磁石はコイル1の磁界に引き寄せられ、左が南、右が北の状態で停止する。
②
コイル1の電流を止め、コイル2の上部から電流を流し、下部から電流を流す。
上のコイル2の内側が北になり、下のコイル2の内側が南になる。
永久磁石はその磁場に引き寄せられ、時計回りに90°回転して止まる。
③
コイル2の電流を止め、コイル1の右側から電流を流し、左側から出るようにする。
左のコイル1の内側が南になり、右のコイル1の内側が北になる。
永久磁石はその磁場に引き寄せられ、さらに時計回りに90°回転して止まる。
④
コイル1の電流を止め、コイル2の下部から電流を流し、上部から出るようにする。
上のコイル2の内側が南になり、下のコイル2の内側が北になる。
永久磁石はその磁場に引き寄せられ、さらに時計回りに90°回転して止まる。
コイルに流れる電流を電子回路で①~④の順に切り替えることで、ステッピングモーターを回転させることができる。この例では、1回のスイッチング動作でステッピングモーターを90°回転させます。
さらに、特定のコイルに電流を流し続けることで、ステッピングモーターは停止位置を維持し、保持トルクを持つことができます。なお、コイルに流す電流の順番を逆にすると、ステッピング・モーターを逆方向に回転させることができる。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。